机器人制作开源方案 | 扫地机器人
1. 功能描述
扫地机器人是现代家庭清洁的得力助手,能够自主规划清扫路径,避开障碍物,有效覆盖整个清洁区域。扫地机器人的出现极大地减轻了家庭清洁的负担,节省了时间和精力,它可以定期清理地面,确保家居环境的整洁和卫生,让家里变得更加舒适、无尘和宜居。
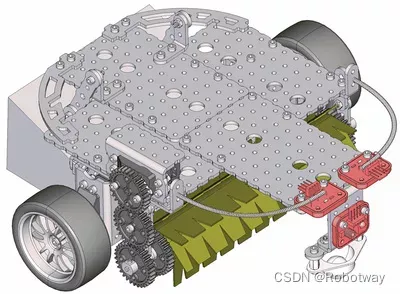
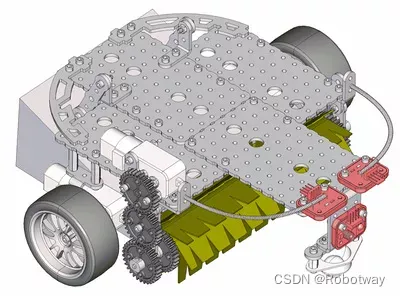
本文示例将实现R058a样机扫地机器人在行进过程中避障并清扫垃圾的功能。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 传感器 | 触须传感器 |
| 近红外传感器 | |
| 电池 | 7.4V锂电池 |
3. 功能实现
编程环境:Arduino 1.8.19
下面提供一个实现扫地机器人在行进过程中避障并清扫垃圾的参考程序(sketch_sep14a.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-14 https://www.robotway.com/------------------------------*/#include <Servo.h>Servo left_wheel; // 左轮Servo right_wheel; // 右轮#define forward_speed_left 60 // 小车前进时,左轮速度#define forward_speed_right 120 // 小车前进时,右轮速度#define back_speed_left 120 // 小车后退时,左轮速度#define back_speed_right 60 // 小车后退时,右轮速度#define turnleft_speed_left 120 // 小车左转时,左轮速度#define turnleft_speed_right 120 // 小车左传时,右轮速度#define turnright_speed_left 60 // 小车右转时,左轮速度#define turnright_speed_right 60 // 小车右转时,右轮速度#define stop_left 90 // 小车停止时,左轮速度#define stop_right 90 // 小车停止时,右轮速度#define obstacle_threshold 500 // 触须传感器阈值#define ir_threshold 800 // 近红外传感器阈值int left_obstacle_sensor; // 左侧触须传感器int right_obstacle_sensor; // 右侧触须传感器int ir_sensor; // 近红外传感器void setup() {delay(50);Serial.begin(9600);left_wheel.attach(3); // 定义左右轮引脚right_wheel.attach(4);pinMode(A0, INPUT); // 左边触须传感器接口pinMode(A2, INPUT); // 右边触须传感器接口pinMode(A3, INPUT); // 前面近红外传感器接口}void loop() {left_obstacle_sensor = analogRead(A0); // 读取左边触须传感器值right_obstacle_sensor = analogRead(A2); // 读取右边触须传感器值ir_sensor = analogRead(A3); // 读取近红外传感器值// 如果左边传感器检测到障碍物,执行后退并向右转操作if (left_obstacle_sensor > obstacle_threshold) {backRight();}// 如果右边传感器检测到障碍物,执行后退并向左转操作else if (right_obstacle_sensor > obstacle_threshold) {backLeft();}// 如果前面近红外传感器检测到障碍物,执行后退操作else if (ir_sensor > ir_threshold) {back();}// 如果都没有检测到障碍物,执行前进操作else {forward();}}// 小车前进void forward() {left_wheel.write(forward_speed_left);right_wheel.write(forward_speed_right);}// 小车后退void back() {left_wheel.write(back_speed_left);right_wheel.write(back_speed_right);}// 小车后退左转void backLeft() {left_wheel.write(back_speed_left);right_wheel.write(turnleft_speed_right);}// 小车后退右转void backRight() {left_wheel.write(turnright_speed_left);right_wheel.write(back_speed_right);}// 小车停止void stop() {left_wheel.write(stop_left); // 停止right_wheel.write(stop_right); // 停止}4. 扩展样机
本样机有一些简单的扩展案例,如下图所示将舵机更换为直流电机:
程序源代码及样机3D文件等资料详见 扫地机器人
相关文章:
机器人制作开源方案 | 扫地机器人
1. 功能描述 扫地机器人是现代家庭清洁的得力助手,能够自主规划清扫路径,避开障碍物,有效覆盖整个清洁区域。扫地机器人的出现极大地减轻了家庭清洁的负担,节省了时间和精力,它可以定期清理地面,确保家居环…...
10.2手动推导linux中file, cdev, inode之间的关系
是时候可以手动推导一下linux里面基类父类和子类的关系了 代码放最后把 简单说明版 详细流程 第一步注册驱动 cdev结构体能看做是一个基类,那么链表里面都是字符设备驱动的cdev连载一起,啥串口,lcd的,通过cdev->list_head连接 那cdev结构体里有主次设备号 第一步 使用r…...
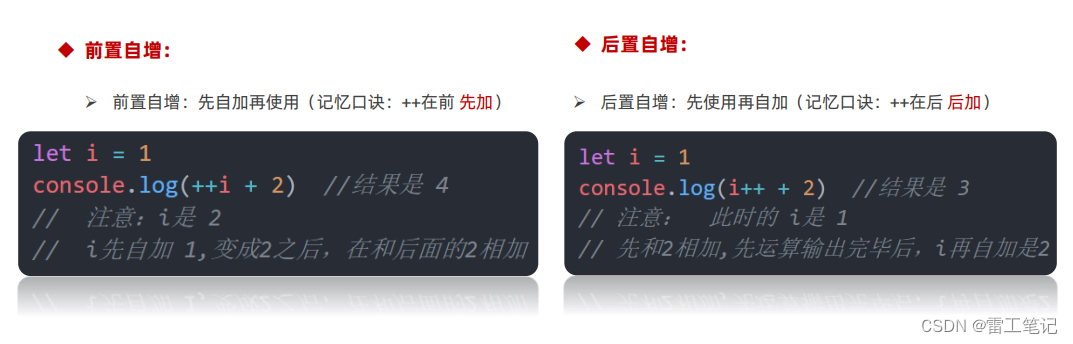
JavaScript基础知识13——运算符:一元运算符,二元运算符
哈喽,大家好,我是雷工。 JavaScript的运算符可以根据所需表达式的个数,分为一元运算符、二元运算符、三元运算符。 一、一元运算符 1、一元运算符:只需要一个表达式就可以运算的运算符。 示例:正负号 一元运算符有两…...
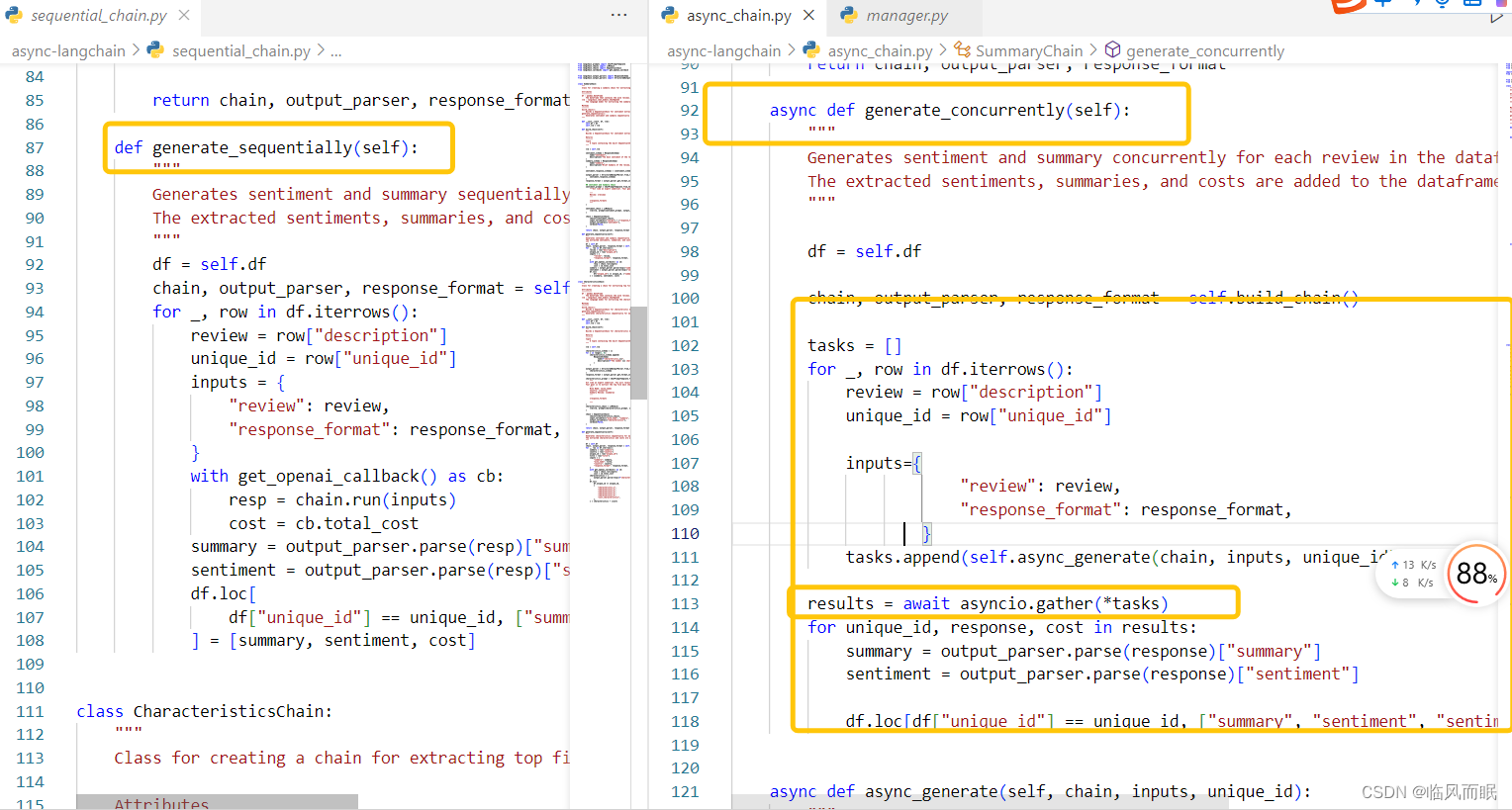
异步使用langchain
文章目录 一.先利用langchain官方文档的AI功能问问二.langchain async api三.串行,异步速度比较 一.先利用langchain官方文档的AI功能问问 然后看他给的 Verified Sources 这个页面里面虽然有些函数是异步函数,但是并非专门讲解异步的 二.langchain asy…...
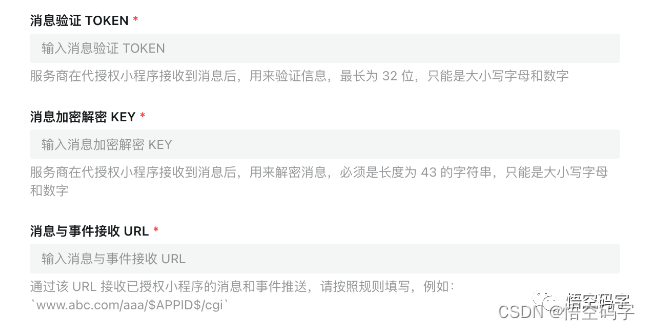
抖音开放平台第三方代小程序开发,授权事件、消息与事件通知总结
大家好,我是小悟 关于抖音开放平台第三方代小程序开发的两个事件接收推送通知,是开放平台代小程序实现业务的重要功能。 授权事件推送和消息与事件推送类型都以Event的值判断。 授权事件推送通知 授权事件推送包括:推送票据、授权成功、授…...
华为9.20笔试 复现
第一题 丢失报文的位置 思路:从数组最小索引开始遍历 #include <iostream> #include <vector> using namespace std; // 求最小索引值 int getMinIdx(vector<int> &arr) {int minidx 0;for (int i 0; i < arr.size(); i){if (arr[i] …...
二十五、【色调调整基础】
文章目录 1、亮度/对比度a、亮度b、对比度 2、曝光度3、阈值4、色阶5、反相6、黑白7、渐变映射 1、亮度/对比度 a、亮度 亮度是指画面的明亮程度 b、对比度 对比度指的是一幅图像中,明暗区域最亮和最暗之间不同亮度层级的测量,如下图所示࿰…...
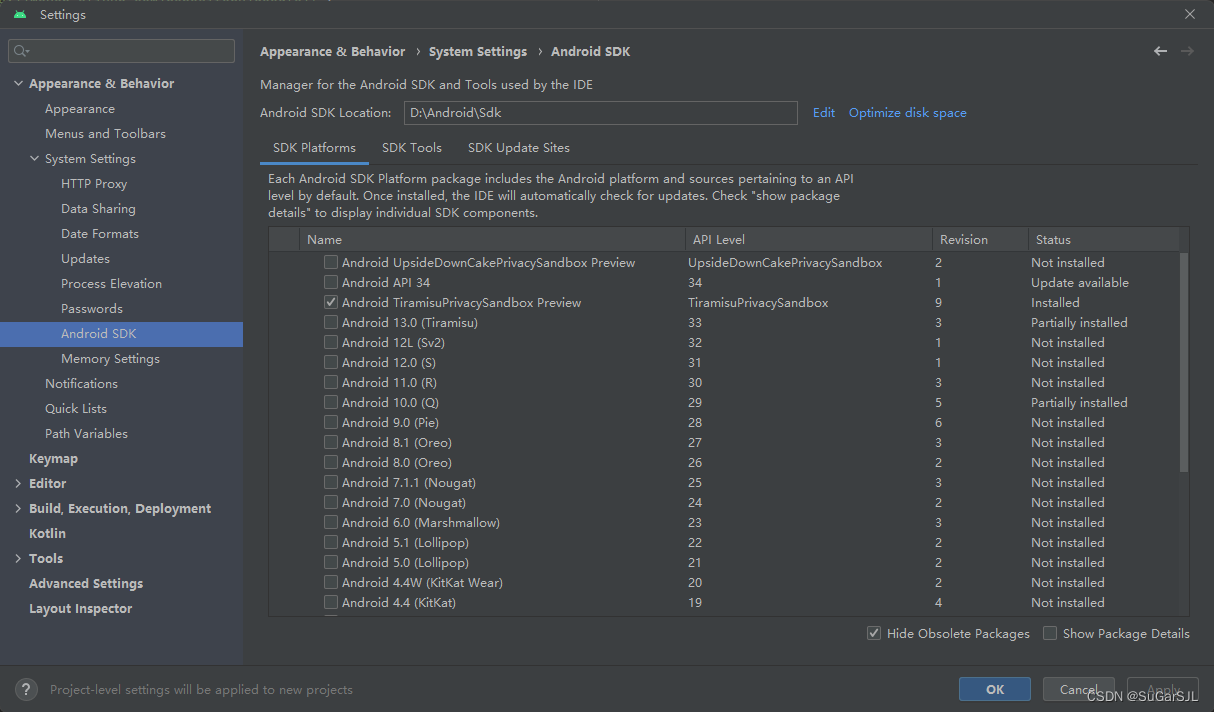
Android Studio SDK manager加载packages不全
打开Android Studio里的SDK manager,发现除了已安装的,其他的都不显示。 解决方法: 设置代理: 方便复制> http://mirrors.neusoft.edu.cn/ 重启Android Studio...

[esp32-wroom]基础开发
1、点亮LED灯 int led_pin2; void setup() {// put your setup code here, to run once:pinMode(led_pin,OUTPUT);}void loop() {// put your main code here, to run repeatedly:digitalWrite(led_pin,HIGH);delay(1000);digitalWrite(led_pin,LOW);delay(1000); } 2、LED流…...

利用Docker 实现 MiniOB环境搭建
官方文档有,但是感觉写的跟shift一样(或者是我的阅读理解跟shift一样 下面是自己的理解 一.下载docker 这个去官网下载安装,没什么说的 Docker: Accelerated Container Application Development 二.用docker下载MiniOB环境 1.打开powershell ( win r ,然后输入powershell…...

【DB2】—— 数据库表查询一直查不出来数据
问题描述 近日,数据库的测试环境中有一个打印日志表,一共有将近50w的数据,Java程序在查询的时候一直超时。 在DBvisualizer中查询数据无论是使用select * 还是 select count(*)查询的时候都是一直在执行,就是查询不到结果。 排查…...

【教程】使用vuepress构建静态文档网站,并部署到github上
官网 快速上手 | VuePress (vuejs.org) 构建项目 我们跟着官网的教程先构建一个demo 这里我把 vuepress-starter 这个项目名称换成了 howtolive 创建并进入一个新目录 mkdir howtolive && cd howtolive使用你喜欢的包管理器进行初始化 yarn init 这里的问题可以一…...

python 机器视觉 车牌识别 - opencv 深度学习 机器学习 计算机竞赛
1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于python 机器视觉 的车牌识别系统 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:3分创新点:3分 🧿 更多资…...
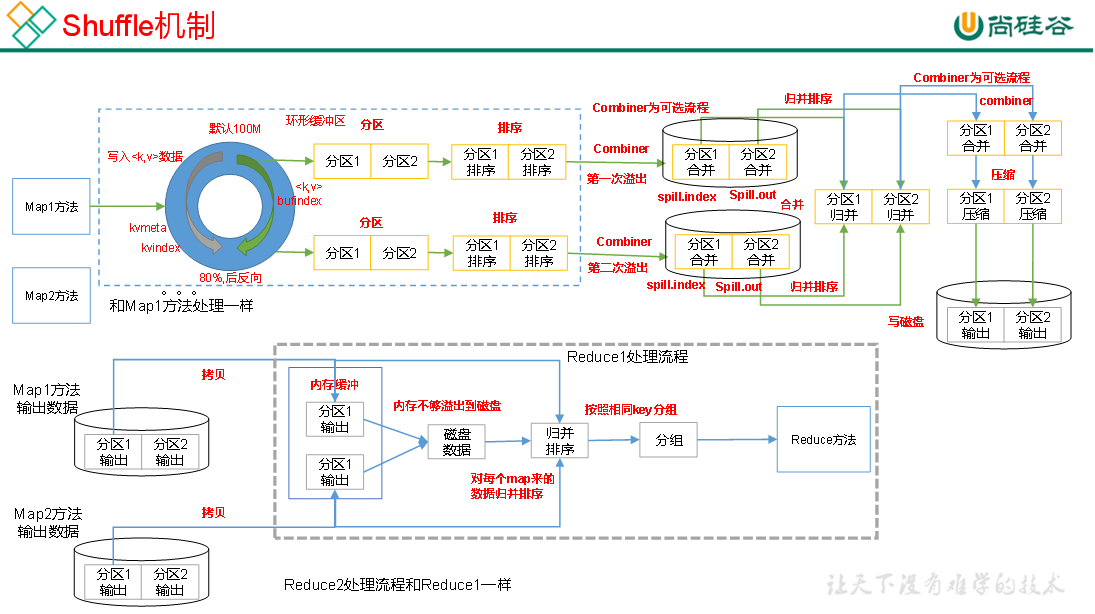
Hadoop3教程(十二):MapReduce中Shuffle机制的概述
文章目录 (95) Shuffle机制什么是shuffle?Map阶段Reduce阶段 参考文献 (95) Shuffle机制 面试的重点 什么是shuffle? Map方法之后,Reduce方法之前的这段数据处理过程,就叫做shuff…...

MySQL为什么用b+树
索引是一种数据结构,用于帮助我们在大量数据中快速定位到我们想要查找的数据。 索引最形象的比喻就是图书的目录了。注意这里的大量,数据量大了索引才显得有意义,如果我想要在[1,2,3,4]中找到4这个数据,直接对全数据检索也很快&am…...

浅谈机器学习中的概率模型
浅谈机器学习中的概率模型 其实,当牵扯到概率的时候,一切问题都会变的及其复杂,比如我们监督学习任务中,对于一个分类任务,我们经常是在解决这样一个问题,比如对于一个n维的样本 X [ x 1 , x 2 , . . . .…...

MySQL 函数 索引 事务 管理
目录 一. 字符串相关的函数 二.数学相关函数 编辑 三.时间日期相关函数 date.sql 四.流程控制函数 centrol.sql 分页查询 使用分组函数和分组字句 group by 数据分组的总结 多表查询 自连接 子查询 subquery.sql 五.表的复制 六.合并查询 七.表的外连接 …...

Flink如何基于事件时间消费分区数比算子并行度大的kafka主题
背景 使用flink消费kafka的主题的情况我们经常遇到,通常我们都是不需要感知数据源算子的并行度和kafka主题的并行度之间的关系的,但是其实在kafka的主题分区数大于数据源算子的并行度时,是有一些注意事项的,本文就来讲解下这些注…...
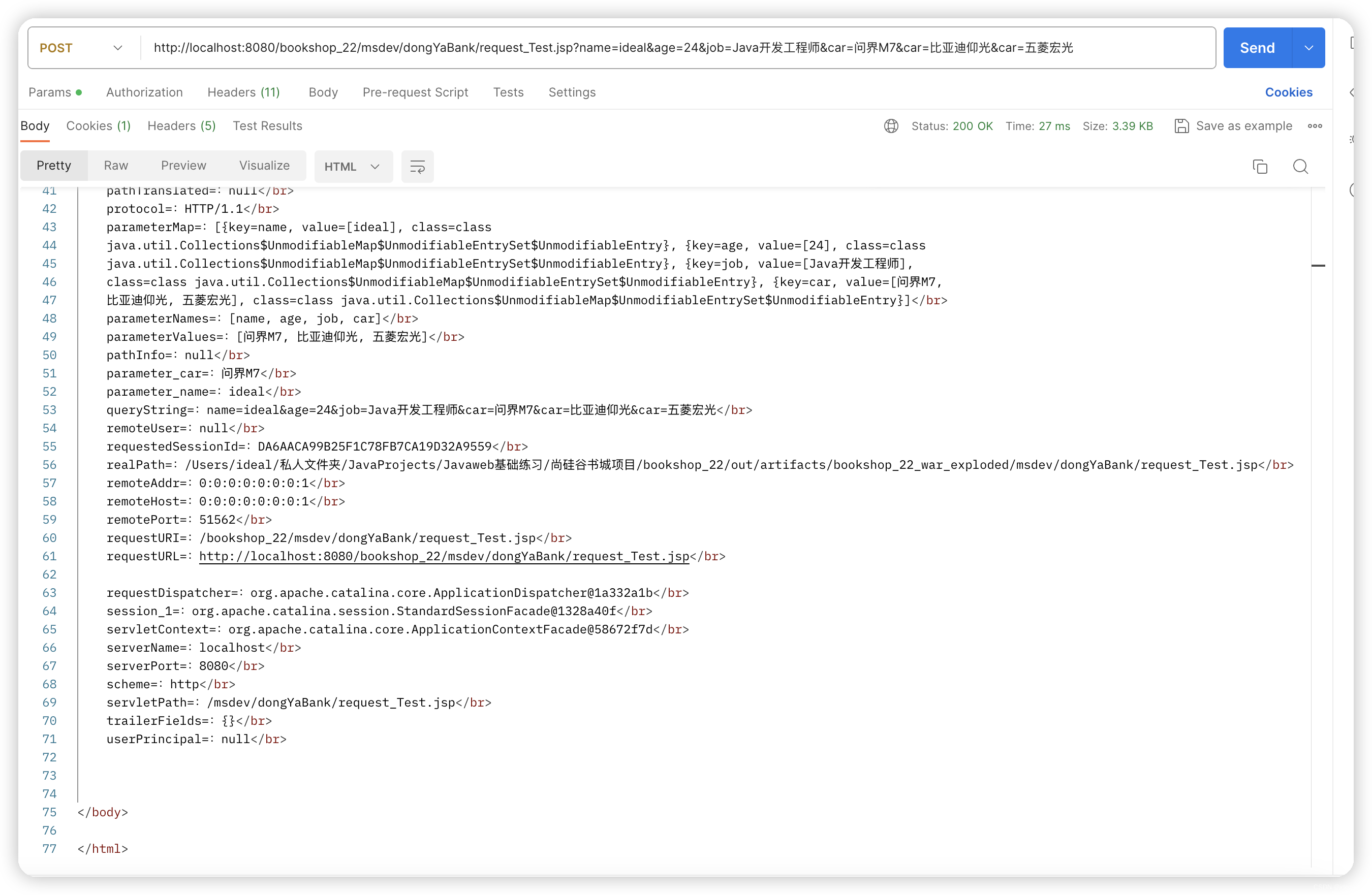
总结:JavaEE的Servlet中HttpServletRequest请求对象调用各种API方法结果示例
总结:JavaEE的Servlet中HttpServletRequest请求对象调用各种API方法结果示例 一方法调用顺序是按照英文字母顺序从A-Z二该示例可以用作servlet中request的API参考,从而知道该如何获取哪些路径参数等等三Servlet的API版本5.0.0、JSP的API版本:…...
ChatGPT AIGC 完成Excel跨多表查找操作vlookup+indirect
VLOOKUP和INDIRECT的组合在Excel中用于跨表查询,其中VLOOKUP函数用于在另一张表中查找数据,INDIRECT函数则用于根据文本字符串引用不同的工作表。具体操作如下: 1.假设在工作表1中,A列有你要查找的值,B列是你希望查询的工作表名称。 2.在工作表1的C列输入以下公式:=VLO…...

Applite:用图形化界面轻松管理Mac软件的终极解决方案
Applite:用图形化界面轻松管理Mac软件的终极解决方案 【免费下载链接】Applite User-friendly GUI macOS application for Homebrew Casks 项目地址: https://gitcode.com/gh_mirrors/ap/Applite 还在为Mac上繁琐的软件管理而烦恼吗?Applite作为一…...

10个无状态服务构建技巧:解锁gh_mirrors/awe/awesome-sre中的水平扩展最佳实践
10个无状态服务构建技巧:解锁gh_mirrors/awe/awesome-sre中的水平扩展最佳实践 【免费下载链接】awesome-sre A curated list of Site Reliability and Production Engineering resources. 项目地址: https://gitcode.com/gh_mirrors/awe/awesome-sre 在现代…...

VMware Unlocker:免费解锁VMware的macOS虚拟机支持终极指南
VMware Unlocker:免费解锁VMware的macOS虚拟机支持终极指南 【免费下载链接】unlocker VMware Workstation macOS 项目地址: https://gitcode.com/gh_mirrors/unloc/unlocker 想在Windows或Linux电脑上运行macOS虚拟机,却发现VMware根本不提供苹…...

使用Helm Chart在Kubernetes部署高可用authentik身份认证中心
1. 项目概述:为什么我们需要一个身份认证的“中央厨房”?在云原生和微服务架构大行其道的今天,一个典型的应用系统可能由几十甚至上百个独立的服务组成。每个服务都需要处理用户登录、权限验证、单点登录(SSO)这些基础…...

树莓派+Ollama分离部署OpenClaw:打造家庭局域网AI助手
1. 项目概述:在树莓派上部署OpenClaw,实现本地网络AI助手最近在折腾我的家庭实验室,想把AI助手的能力从主力电脑上解放出来,让它变成一个常驻在角落里的独立服务。我的主力机性能不错,跑大语言模型没问题,但…...

【高频电子线路】从抽头到变压器:解锁谐振功率放大器的阻抗变换实战
1. 高频电路中的阻抗匹配为什么重要 我第一次调试射频功放时,烧掉了三个末级晶体管才明白一个道理:高频电路里,阻抗不匹配就像让卡车走自行车道。那个周末实验室里飘着的焦糊味,至今让我对阻抗变换保持敬畏。 在高频环境下&#x…...
)
WinForm弹窗进阶:手把手教你封装一个通用的MessageBoxHelper工具类(.NET Framework/C#)
WinForm弹窗进阶:打造高复用性的MessageBoxHelper工具类 在WinForm开发中,MessageBox.Show()就像空气一样无处不在——从简单的操作确认到复杂的错误处理,这个基础组件承担了太多交互职责。但当你第20次写下MessageBox.Show("操作成功&q…...

不精确计算:芯片设计中的功耗优化与精度权衡技术
1. 不精确计算:从学术概念到芯片设计的功耗革命在移动设备、物联网终端和边缘计算节点无处不在的今天,功耗已经取代了单纯的性能,成为许多芯片设计的首要约束。我们习惯了处理器以全精度、零误差的方式执行每一条指令,但你是否想过…...

收藏!小白程序员快速入行Agent开发:低门槛高薪风口已开启!
本文详细介绍了Agent开发领域的入门要求,强调Python工程能力、LLM API调用、RAG技术、Function Calling原理等核心技能。文章指出,虽然Agent开发对学历要求不高,但需掌握扎实的技术栈和具备实战项目经验,建议小白抓住当前低门槛窗…...

9.实战案例拆解
好的,我们开始。先别急着看那些“月入十万”的爽文,我这边先给你看一段我昨晚在调试一个树莓派Pico W的I2C总线时,在终端里敲出来的报错信息: [ERROR] I2C timeout: SDA line held low by device at 0x3C这条错误让我折腾了半小时。最后发现是传感器模块的电源纹波太大,导…...