ros2 UR10仿真包运行
前言
一个月前安装了一下这个包,但是有报错。现在换了一个强劲的电脑,内存64G ,显存39G ,终于跑起来了,没有报错。网页控制器可以控制RVIZ中的机器人旋转。
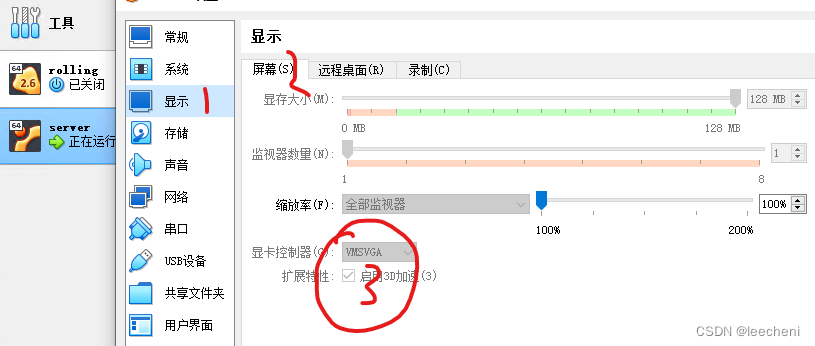
vituralBOX中3D加速要勾选,这样才能发挥独立显卡的作业,才能让虚拟机不卡顿。
我是通过远程桌面去访问这个强劲电脑,因网速问题略微卡顿,不太影响。
1.加载虚拟控制器
这个加载的时候,非root用户会提示权限不够,切换到根用户,
sudo su会提示找不到ros2
cheni@yuchen:~$ ros2 run ur_client_library start_ursim.sh -m ur10Got permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Get "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/networks/ursim_net": dial unix /var/run/docker.sock: connect: permission deniedCreating ursim_netGot permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Post "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/networks/create": dial unix /var/run/docker.sock: connect: permission denieddocker: Got permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Post "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/containers/create?name=ursim": dial unix /var/run/docker.sock: connect: permission denied.See 'docker run --help'.[ros2run]: Process exited with failure 126先source一下再运行就好
root@yuchen:/home/cheni# source /opt/ros/rolling/setup.sh
root@yuchen:/home/cheni# ros2 run ur_client_library start_ursim.sh -m ur10
效果如下:
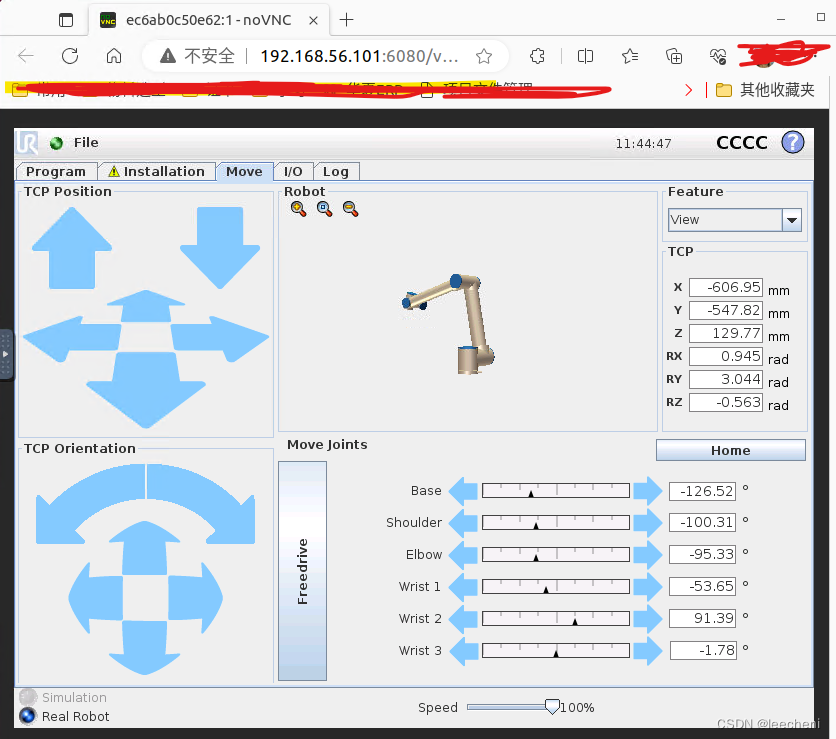
root@yuchen:/home/cheni# ros2 run ur_client_library start_ursim.sh -m ur10% Total % Received % Xferd Average Speed Time Time Time CurrentDload Upload Total Spent Left Speed0 0 0 0 0 0 0 0 --:--:-- 0:02:00 --:--:-- 0curl: (56) OpenSSL SSL_read: error:0A000126:SSL routines::unexpected eof while reading, errno 0ursim_net already exists37786d6c6b225e044706e8bef35af83ccd6dd1e79cb1194747cd44bd23e1bbecDocker URSim is runningTo access Polyscope, open the following URL in a web browser.http://192.168.56.101:6080/vnc.htmlTo exit, press CTRL+C^CkillingError response from daemon: Cannot kill container: ursim: No such container: ursim[ros2run]: Process exited with failure 1root@yuchen:/home/cheni# ros2 run ur_client_library start_ursim.sh -m ur10% Total % Received % Xferd Average Speed Time Time Time CurrentDload Upload Total Spent Left Speed0 0 0 0 0 0 0 0 --:--:-- 0:02:11 --:--:-- 0curl: (28) Failed to connect to github.com port 443 after 131175 ms: 连接超时ursim_net already existsec6ab0c50e626867e20ada8b21ff182586d2fa02f866d83d35bc819b9a09d83aDocker URSim is runningTo access Polyscope, open the following URL in a web browser.http://192.168.56.101:6080/vnc.htmlTo exit, press CTRL+C2.打开浏览器进行连接
效果如下,想改成中文,测试了不成功。只能看英文的了。点击到这个界面就好。
3.启动rviz
cheni@yuchen:~$ ros2 launch ur_robot_driver ur_control.launch.py ur_type:=ur10 robot_ip:=192.168.56.101 launch_rviz:=true[INFO] [launch]: All log files can be found below /home/cheni/.ros/log/2023-10-18-17-16-40-997672-yuchen-19246[INFO] [launch]: Default logging verbosity is set to INFO[INFO] [dashboard_client-2]: process started with pid [19254][INFO] [controller_stopper_node-3]: process started with pid [19256][INFO] [ur_ros2_control_node-1]: process started with pid [19252][INFO] [urscript_interface-4]: process started with pid [19258][INFO] [robot_state_publisher-5]: process started with pid [19260][INFO] [rviz2-6]: process started with pid [19262][INFO] [spawner-7]: process started with pid [19264][INFO] [spawner-8]: process started with pid [19266][INFO] [spawner-9]: process started with pid [19268][INFO] [spawner-10]: process started with pid [19270][INFO] [spawner-11]: process started with pid [19272][INFO] [spawner-12]: process started with pid [19274][rviz2-6] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.[controller_stopper_node-3] [INFO] [1697620601.585913917] [Controller stopper]: Waiting for switch controller service to come up on controller_manager/switch_controller[ur_ros2_control_node-1] [WARN] [1697620601.599039497] [controller_manager]: [Deprecated] Passing the robot description parameter directly to the control_manager node is deprecated. Use '~/robot_description' topic from 'robot_state_publisher' instead.[ur_ros2_control_node-1] text not specified in the tf_prefix tag[ur_ros2_control_node-1] [INFO] [1697620601.599400048] [resource_manager]: Loading hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601241897] [resource_manager]: Initialize hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601288221] [resource_manager]: Successful initialization of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697620601.601398129] [resource_manager]: 'configure' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601402703] [resource_manager]: Successful 'configure' of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697620601.601416810] [resource_manager]: 'activate' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697620601.601421726] [URPositionHardwareInterface]: Starting ...please wait...[ur_ros2_control_node-1] [INFO] [1697620601.601428857] [URPositionHardwareInterface]: Initializing driver...[robot_state_publisher-5] [INFO] [1697620601.604043017] [robot_state_publisher]: Robot initialized[rviz2-6] [INFO] [1697620601.895750788] [rviz2]: Stereo is NOT SUPPORTED[rviz2-6] [INFO] [1697620601.895889721] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)[rviz2-6] [INFO] [1697620601.925227291] [rviz2]: Stereo is NOT SUPPORTED[spawner-7] [INFO] [1697620603.756785754] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620603.767271620] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620603.790952404] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620603.824011749] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620603.836708094] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620603.859390892] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[dashboard_client-2] [ERROR] [1697620604.617355057] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620604.617367336] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[spawner-7] [INFO] [1697620605.770359059] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620605.780972574] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620605.801798313] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620605.840607511] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620605.853351245] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620605.869930016] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [spawner-7] [INFO] [1697620607.784794710] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620607.791828202] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620607.816176219] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620607.853336202] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620607.872221126] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620607.886508104] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[spawner-7] [INFO] [1697620609.796913481] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [INFO] [1697620609.801278996] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697620609.829892511] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697620609.863629439] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697620609.886876876] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697620609.898657037] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[spawner-8] [ERROR] [1697620611.815283050] [spawner_joint_state_broadcaster]: Controller manager not available[spawner-7] [ERROR] [1697620611.815343330] [spawner_scaled_joint_trajectory_controller]: Controller manager not available[spawner-9] [ERROR] [1697620611.850509388] [spawner_io_and_status_controller]: Controller manager not available[spawner-11] [ERROR] [1697620611.877378395] [spawner_force_torque_sensor_broadcaster]: Controller manager not available[spawner-10] [ERROR] [1697620611.898880900] [spawner_speed_scaling_state_broadcaster]: Controller manager not available[spawner-12] [ERROR] [1697620611.918231227] [spawner_forward_position_controller]: Controller manager not available[ERROR] [spawner-8]: process has died [pid 19266, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner joint_state_broadcaster --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-7]: process has died [pid 19264, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner scaled_joint_trajectory_controller -c /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-9]: process has died [pid 19268, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner io_and_status_controller --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-11]: process has died [pid 19272, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner force_torque_sensor_broadcaster --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-10]: process has died [pid 19270, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner speed_scaling_state_broadcaster --controller-manager /controller_manager --controller-manager-timeout 10 --ros-args'].[ERROR] [spawner-12]: process has died [pid 19274, exit code 1, cmd '/opt/ros/rolling/lib/controller_manager/spawner forward_position_controller --controller-manager /controller_manager --controller-manager-timeout 10 --inactive --ros-args'].[ur_ros2_control_node-1] [ERROR] [1697620617.674695116] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620617.674854194] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620630.730729841] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620630.730757786] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620643.786044906] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620643.786084098] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620656.844871224] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620656.844879031] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620669.897358065] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620669.897412139] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620682.957343109] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620682.957419768] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620696.009247417] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620696.009280643] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620709.067121860] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620709.067121907] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620722.121106520] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620722.121155433] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [rviz2-6] [ERROR] [1697620734.066237695] [rviz2]: Failed to open /opt/ros/rolling/share/ur_description/rviz/view_robot.rviz for writing.[ur_ros2_control_node-1] [ERROR] [1697620735.177713915] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620735.177713751] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620748.234146646] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620748.234196430] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620761.290381017] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620761.290386082] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620774.345313786] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620774.345364767] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620787.401409613] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620787.401416073] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620800.457585346] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620800.457611877] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620813.519876814] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620813.519954753] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620826.570448827] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620826.570450183] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620839.626253307] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620839.626252825] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620852.681166419] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620852.681139780] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620865.738521330] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620865.739197737] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620878.793494446] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620878.793533192] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620891.853834705] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620891.853849910] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620904.905491272] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620904.905613071] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620917.961366189] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620917.961403904] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620931.017307838] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620931.017324588] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ur_ros2_control_node-1] [ERROR] [1697620944.073232461] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[dashboard_client-2] [ERROR] [1697620944.073208368] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620957.129724062] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620957.129786765] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620970.185587415] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620970.185625411] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620983.244408711] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620983.244616094] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697620996.297661450] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697620996.297665241] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621009.353842812] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621009.353832578] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621022.410149541] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621022.410149571] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621035.465370042] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621035.465344708] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [dashboard_client-2] [ERROR] [1697621048.521965941] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds[ur_ros2_control_node-1] [ERROR] [1697621048.521969959] [UR_Client_Library:]: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)[dashboard_client-2] [INFO] [1697621051.328878010] [rclcpp]: signal_handler(signum=2)[controller_stopper_node-3] [INFO] [1697621051.328888069] [rclcpp]: signal_handler(signum=2)[controller_stopper_node-3] [INFO] [1697621051.329342045] [Controller stopper]: Service available[controller_stopper_node-3] [INFO] [1697621051.329359168] [Controller stopper]: Waiting for list controllers service to come up on controller_manager/list_controllers[controller_stopper_node-3] [INFO] [1697621051.329367216] [Controller stopper]: Service available[controller_stopper_node-3] [controller_stopper_node-3] >>> [rcutils|error_handling.c:108] rcutils_set_error_state()[controller_stopper_node-3] This error state is being overwritten:[controller_stopper_node-3] [controller_stopper_node-3] 'rcl node's context is invalid, at ./src/rcl/node.c:405'[controller_stopper_node-3] [controller_stopper_node-3] with this new error message:[controller_stopper_node-3] [controller_stopper_node-3] 'publisher's context is invalid, at ./src/rcl/publisher.c:424'[controller_stopper_node-3] [controller_stopper_node-3] rcutils_reset_error() should be called after error handling to avoid this.[controller_stopper_node-3] <<<[controller_stopper_node-3] terminate called after throwing an instance of 'rclcpp::exceptions::RCLError'[controller_stopper_node-3] what(): failed to create guard condition: the given context is not valid, either rcl_init() was not called or rcl_shutdown() was called., at ./src/rcl/guard_condition.c:67[rviz2-6] [INFO] [1697621051.328744551] [rclcpp]: signal_handler(signum=2)[robot_state_publisher-5] [INFO] [1697621051.328757334] [rclcpp]: signal_handler(signum=2)[ur_ros2_control_node-1] [INFO] [1697621051.328858453] [rclcpp]: signal_handler(signum=2)[urscript_interface-4] [INFO] [1697621051.328813758] [rclcpp]: signal_handler(signum=2)[INFO] [robot_state_publisher-5]: process has finished cleanly [pid 19260][INFO] [rviz2-6]: process has finished cleanly [pid 19262][urscript_interface-4] ERROR ./src/comm/tcp_socket.cpp 129: Failed to connect to robot on IP 192.168.56.101. Please check that the robot is booted and reachable on 192.168.56.101. Retrying in 10 seconds [ERROR] [controller_stopper_node-3]: process has died [pid 19256, exit code -6, cmd '/opt/ros/rolling/lib/ur_robot_driver/controller_stopper_node --ros-args -r __node:=controller_stopper --params-file /tmp/launch_params_vfxkhuw3 --params-file /tmp/launch_params_6shznysc --params-file /tmp/launch_params_aqbhos7w'].[ERROR] [urscript_interface-4]: process[urscript_interface-4] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'[ERROR] [dashboard_client-2]: process[dashboard_client-2] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'[ERROR] [ur_ros2_control_node-1]: process[ur_ros2_control_node-1] failed to terminate '5' seconds after receiving 'SIGINT', escalating to 'SIGTERM'[INFO] [urscript_interface-4]: sending signal 'SIGTERM' to process[urscript_interface-4][INFO] [dashboard_client-2]: sending signal 'SIGTERM' to process[dashboard_client-2][INFO] [ur_ros2_control_node-1]: sending signal 'SIGTERM' to process[ur_ros2_control_node-1][urscript_interface-4] [INFO] [1697621056.339854857] [rclcpp]: signal_handler(signum=15)[dashboard_client-2] [INFO] [1697621056.340825489] [rclcpp]: signal_handler(signum=15)[ur_ros2_control_node-1] [INFO] [1697621056.342180730] [rclcpp]: signal_handler(signum=15)[ERROR] [urscript_interface-4]: process[urscript_interface-4] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'[ERROR] [dashboard_client-2]: process[dashboard_client-2] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'[ERROR] [ur_ros2_control_node-1]: process[ur_ros2_control_node-1] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'[INFO] [urscript_interface-4]: sending signal 'SIGKILL' to process[urscript_interface-4][INFO] [dashboard_client-2]: sending signal 'SIGKILL' to process[dashboard_client-2][INFO] [ur_ros2_control_node-1]: sending signal 'SIGKILL' to process[ur_ros2_control_node-1][ERROR] [urscript_interface-4]: process has died [pid 19258, exit code -9, cmd '/opt/ros/rolling/lib/ur_robot_driver/urscript_interface --ros-args --params-file /tmp/launch_params_nb_ud0iw'].[ERROR] [dashboard_client-2]: process has died [pid 19254, exit code -9, cmd '/opt/ros/rolling/lib/ur_robot_driver/dashboard_client --ros-args -r __node:=dashboard_client --params-file /tmp/launch_params_x40xzydl'].[ERROR] [ur_ros2_control_node-1]: process has died [pid 19252, exit code -9, cmd '/opt/ros/rolling/lib/ur_robot_driver/ur_ros2_control_node --ros-args --params-file /tmp/launch_params_aplj4v_p --params-file /opt/ros/rolling/share/ur_robot_driver/config/ur10_update_rate.yaml --params-file /tmp/launch_params_kh4tysuh'].cheni@yuchen:~$ ros2 launch ur_robot_driver ur_control.launch.py ur_type:=ur10 robot_ip:=192.168.56.101 launch_rviz:=true[INFO] [launch]: All log files can be found below /home/cheni/.ros/log/2023-10-18-17-27-27-837054-yuchen-23621[INFO] [launch]: Default logging verbosity is set to INFO[INFO] [dashboard_client-2]: process started with pid [23630][INFO] [controller_stopper_node-3]: process started with pid [23632][INFO] [ur_ros2_control_node-1]: process started with pid [23628][INFO] [urscript_interface-4]: process started with pid [23634][INFO] [robot_state_publisher-5]: process started with pid [23636][INFO] [rviz2-6]: process started with pid [23638][INFO] [spawner-7]: process started with pid [23640][INFO] [spawner-8]: process started with pid [23642][INFO] [spawner-9]: process started with pid [23644][INFO] [spawner-10]: process started with pid [23646][INFO] [spawner-11]: process started with pid [23656][INFO] [spawner-12]: process started with pid [23658][rviz2-6] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.[controller_stopper_node-3] [INFO] [1697621248.323970889] [Controller stopper]: Waiting for switch controller service to come up on controller_manager/switch_controller[dashboard_client-2] [INFO] [1697621248.332004402] [UR_Client_Library:]: Connected: Universal Robots Dashboard Server[dashboard_client-2] [ur_ros2_control_node-1] [WARN] [1697621248.343058321] [controller_manager]: [Deprecated] Passing the robot description parameter directly to the control_manager node is deprecated. Use '~/robot_description' topic from 'robot_state_publisher' instead.[ur_ros2_control_node-1] text not specified in the tf_prefix tag[ur_ros2_control_node-1] [INFO] [1697621248.343371642] [resource_manager]: Loading hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.346872971] [resource_manager]: Initialize hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.346927862] [resource_manager]: Successful initialization of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697621248.347084371] [resource_manager]: 'configure' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.347091370] [resource_manager]: Successful 'configure' of hardware 'ur10'[ur_ros2_control_node-1] [INFO] [1697621248.347105751] [resource_manager]: 'activate' hardware 'ur10' [ur_ros2_control_node-1] [INFO] [1697621248.347110579] [URPositionHardwareInterface]: Starting ...please wait...[ur_ros2_control_node-1] [INFO] [1697621248.347118214] [URPositionHardwareInterface]: Initializing driver...[robot_state_publisher-5] [INFO] [1697621248.350609220] [robot_state_publisher]: Robot initialized[ur_ros2_control_node-1] [WARN] [1697621248.361342137] [UR_Client_Library:]: Your system/user seems not to be setup for FIFO scheduling. We recommend using a lowlatency kernel with FIFO scheduling. See https://github.com/UniversalRobots/Universal_Robots_ROS_Driver/blob/master/ur_robot_driver/doc/real_time.md for details.[rviz2-6] [INFO] [1697621248.626779825] [rviz2]: Stereo is NOT SUPPORTED[rviz2-6] [INFO] [1697621248.627533634] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)[rviz2-6] [INFO] [1697621248.647145156] [rviz2]: Stereo is NOT SUPPORTED[ur_ros2_control_node-1] [INFO] [1697621248.717338678] [UR_Client_Library:]: Negotiated RTDE protocol version to 2.[ur_ros2_control_node-1] [INFO] [1697621248.717439732] [UR_Client_Library:]: Setting up RTDE communication with frequency 125.000000[spawner-8] [INFO] [1697621250.548518465] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697621250.590337892] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-7] [INFO] [1697621250.602488770] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697621250.620963765] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697621250.633218873] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697621250.692575016] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[ur_ros2_control_node-1] [WARN] [1697621251.982466542] [UR_Client_Library:]: DEPRECATION NOTICE: Setting the keepalive count has been deprecated. Instead use the RobotReceiveTimeout, to set the timeout directly in the write commands. Please change your code to set the read timeout in the write commands directly. This keepalive count will overwrite the timeout passed to the write functions.[ur_ros2_control_node-1] [WARN] [1697621251.982506841] [UR_Client_Library:]: DEPRECATION NOTICE: Setting the keepalive count has been deprecated. Instead you should set the timeout directly in the write commands. Please change your code to set the read timeout in the write commands directly. This keepalive count will overwrite the timeout passed to the write functions.[ur_ros2_control_node-1] [INFO] [1697621251.982512081] [URPositionHardwareInterface]: Calibration checksum: 'calib_17227329492635474227'.[spawner-8] [INFO] [1697621252.562613654] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-10] [INFO] [1697621252.602825499] [spawner_speed_scaling_state_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-7] [INFO] [1697621252.616024085] [spawner_scaled_joint_trajectory_controller]: Waiting for '/controller_manager' services to be available[spawner-11] [INFO] [1697621252.641434793] [spawner_force_torque_sensor_broadcaster]: Waiting for '/controller_manager' services to be available[spawner-9] [INFO] [1697621252.646665080] [spawner_io_and_status_controller]: Waiting for '/controller_manager' services to be available[spawner-12] [INFO] [1697621252.703861342] [spawner_forward_position_controller]: Waiting for '/controller_manager' services to be available[ur_ros2_control_node-1] [INFO] [1697621253.055205580] [URPositionHardwareInterface]: Calibration checked successfully.[ur_ros2_control_node-1] [INFO] [1697621253.055307779] [URPositionHardwareInterface]: System successfully started![ur_ros2_control_node-1] [INFO] [1697621253.055320054] [resource_manager]: Successful 'activate' of hardware 'ur10'[controller_stopper_node-3] [INFO] [1697621253.059460067] [Controller stopper]: Service available[controller_stopper_node-3] [INFO] [1697621253.059488185] [Controller stopper]: Waiting for list controllers service to come up on controller_manager/list_controllers[controller_stopper_node-3] [INFO] [1697621253.059504823] [Controller stopper]: Service available[ur_ros2_control_node-1] [WARN] [1697621253.061565941] [controller_manager]: Could not enable FIFO RT scheduling policy[ur_ros2_control_node-1] [WARN] [1697621253.061735037] [UR_Client_Library:]: Your system/user seems not to be setup for FIFO scheduling. We recommend using a lowlatency kernel with FIFO scheduling. See https://github.com/UniversalRobots/Universal_Robots_ROS_Driver/blob/master/ur_robot_driver/doc/real_time.md for details.[ur_ros2_control_node-1] [INFO] [1697621253.116692126] [controller_manager]: Loading controller 'forward_position_controller'[spawner-12] [INFO] [1697621253.137759710] [spawner_forward_position_controller]: Loaded forward_position_controller[ur_ros2_control_node-1] [INFO] [1697621253.138856325] [controller_manager]: Configuring controller 'forward_position_controller'[ur_ros2_control_node-1] [INFO] [1697621253.139698681] [forward_position_controller]: configure successful[ur_ros2_control_node-1] [INFO] [1697621253.175154503] [controller_manager]: Loading controller 'joint_state_broadcaster'[spawner-8] [INFO] [1697621253.195727700] [spawner_joint_state_broadcaster]: Loaded joint_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.197512915] [controller_manager]: Configuring controller 'joint_state_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.197580129] [joint_state_broadcaster]: 'joints' or 'interfaces' parameter is empty. All available state interfaces will be published[spawner-8] [INFO] [1697621253.221031057] [spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.223622825] [controller_manager]: Loading controller 'speed_scaling_state_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.241050528] [speed_scaling_state_broadcaster]: Loading UR SpeedScalingStateBroadcaster with tf_prefix: [spawner-10] [INFO] [1697621253.250161824] [spawner_speed_scaling_state_broadcaster]: Loaded speed_scaling_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.252239879] [controller_manager]: Loading controller 'force_torque_sensor_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.271881201] [controller_manager]: Loading controller 'scaled_joint_trajectory_controller'[spawner-11] [INFO] [1697621253.272446246] [spawner_force_torque_sensor_broadcaster]: Loaded force_torque_sensor_broadcaster[ur_ros2_control_node-1] [WARN] [1697621253.286567684] [scaled_joint_trajectory_controller]: [Deprecated]: "allow_nonzero_velocity_at_trajectory_end" is set to true. The default behavior will change to false.[ur_ros2_control_node-1] [INFO] [1697621253.288512025] [controller_manager]: Loading controller 'io_and_status_controller'[spawner-7] [INFO] [1697621253.289374662] [spawner_scaled_joint_trajectory_controller]: Loaded scaled_joint_trajectory_controller[INFO] [spawner-12]: process has finished cleanly [pid 23658][ur_ros2_control_node-1] [INFO] [1697621253.305532942] [controller_manager]: Configuring controller 'speed_scaling_state_broadcaster'[spawner-9] [INFO] [1697621253.305770366] [spawner_io_and_status_controller]: Loaded io_and_status_controller[ur_ros2_control_node-1] [INFO] [1697621253.306085776] [speed_scaling_state_broadcaster]: Publisher rate set to : 100.0 Hz[ur_ros2_control_node-1] [INFO] [1697621253.307379689] [controller_manager]: Configuring controller 'force_torque_sensor_broadcaster'[ur_ros2_control_node-1] [INFO] [1697621253.310337596] [controller_manager]: Configuring controller 'scaled_joint_trajectory_controller'[ur_ros2_control_node-1] [INFO] [1697621253.310459286] [scaled_joint_trajectory_controller]: No specific joint names are used for command interfaces. Using 'joints' parameter.[ur_ros2_control_node-1] [INFO] [1697621253.310483769] [scaled_joint_trajectory_controller]: Command interfaces are [position] and state interfaces are [position velocity].[ur_ros2_control_node-1] [INFO] [1697621253.310501202] [scaled_joint_trajectory_controller]: Using 'splines' interpolation method.[ur_ros2_control_node-1] [INFO] [1697621253.312947419] [scaled_joint_trajectory_controller]: Action status changes will be monitored at 20.00 Hz.[ur_ros2_control_node-1] [INFO] [1697621253.320653317] [controller_manager]: Configuring controller 'io_and_status_controller'[ur_ros2_control_node-1] [INFO] [1697621253.330893201] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-10] [INFO] [1697621253.332065298] [spawner_speed_scaling_state_broadcaster]: Configured and activated speed_scaling_state_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.346907827] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-11] [INFO] [1697621253.347479372] [spawner_force_torque_sensor_broadcaster]: Configured and activated force_torque_sensor_broadcaster[ur_ros2_control_node-1] [INFO] [1697621253.363632046] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-7] [INFO] [1697621253.364074898] [spawner_scaled_joint_trajectory_controller]: Configured and activated scaled_joint_trajectory_controller[ur_ros2_control_node-1] [INFO] [1697621253.364759362] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.364926034] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.364946460] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.371739379] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.384753616] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [ur_ros2_control_node-1] [INFO] [1697621253.385256245] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [spawner-9] [INFO] [1697621253.390939616] [spawner_io_and_status_controller]: Configured and activated io_and_status_controller[INFO] [spawner-8]: process has finished cleanly [pid 23642][ur_ros2_control_node-1] [INFO] [1697621253.397749739] [io_and_status_controller]: Configure UR gpio controller with tf_prefix: [INFO] [spawner-10]: process has finished cleanly [pid 23646][INFO] [spawner-11]: process has finished cleanly [pid 23656][INFO] [spawner-7]: process has finished cleanly [pid 23640][INFO] [spawner-9]: process has finished cleanly [p效果如下:
点击气泡1里面的箭头,RVIZ和浏览器里面的缩略图都可以正常同步移动。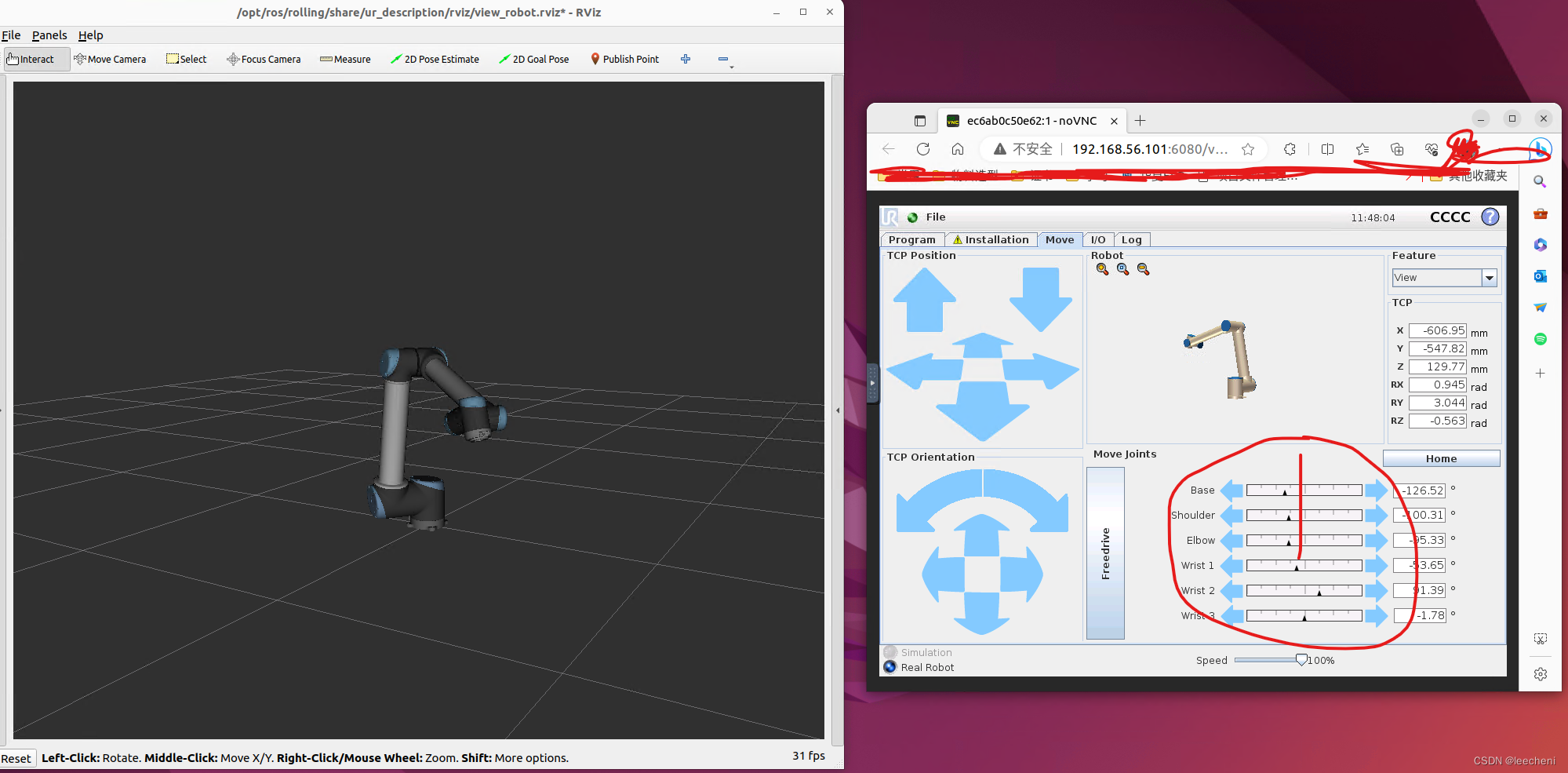
4.总结
看来很多问题还是硬件不行啊,这个强劲的电脑效果不错的。
相关文章:
ros2 UR10仿真包运行
前言 一个月前安装了一下这个包,但是有报错。现在换了一个强劲的电脑,内存64G ,显存39G ,终于跑起来了,没有报错。网页控制器可以控制RVIZ中的机器人旋转。 vituralBOX中3D加速要勾选,这样才能发挥独立显…...

flutter开发实战-安卓apk安装、卸载、启动实现
flutter开发实战-安卓apk安装、卸载、启动实现 在之前的文章中,实现了应用更新apk下载等操作,具体文档看下 这里记录一下使用shell来操作apk的安装、卸载、启动的操作。用到了库shell,Shell用于在Dart中或在代表其他用户执行系统管理任务的…...
AI绘画使用Stable Diffusion(SDXL)绘制玉雕风格的龙
一、引言 灵感来源于在逛 LibLib 时,看到的 Lib 原创者「熊叁gaikan」发布的「翠玉白菜 sdxl|玉雕风格」 的 Lora 模型。简直太好看了,一下子就被吸引了! 科普下「翠玉白菜」: 翠玉白菜是由翠玉所琢碾出白菜形状的清…...

上位机在自动化中有何作用和优势?
今日话题 上位机在自动化中有何作用和优势? 自动化控制编程领域包括单片机、PLC、机器视觉和运动控制等方向。输入“777”,即刻获取关于上位机开发和数据可视化的专业学习资料,近年来,上位机编程逐渐兴起,正在逐步替…...

centos7 部署oracle完整教程(命令行)
centos7 部署oracle完整教程(命令行) 一. centos7安装oracle1.查看Swap分区空间(不能小于2G)2.修改CentOS系统标识 (由于Oracle默认不支持CentOS)2.1.删除CentOS Linux release 7.9.2009 (Core)(快捷键dd)&…...

数据库常用的几大范式NF
1NF 列不可再分 数据表中每个列都是不可再分的数据项。 例子:数据表中有一个属性名为“价格”的属性列。假如进一步将价格属性列划分为“会员价”和“普通价”就违反了列不可再分的原则。也就不再满足1NF 2NF “取消了非主属性对主键的部分函数依赖” 或者说 所有…...

诈骗分子投递“大闸蟹礼品卡”,快递公司如何使用技术手段提前安全预警?
目录 快递公司能不能提前识别? 如何通过技术有效识别 为即将带来的双十一提供安全预警 金秋十月,正是品尝螃蟹的季节。中秋国庆长假也免不了走亲访友,大闸蟹更是成了热门礼品。10月7日,演员孙艺洲发布微博称,“收到…...

基于晶体结构优化的BP神经网络(分类应用) - 附代码
基于晶体结构优化的BP神经网络(分类应用) - 附代码 文章目录 基于晶体结构优化的BP神经网络(分类应用) - 附代码1.鸢尾花iris数据介绍2.数据集整理3.晶体结构优化BP神经网络3.1 BP神经网络参数设置3.2 晶体结构算法应用 4.测试结果…...
模型的选择与调优(网格搜索与交叉验证)
1、为什么需要交叉验证 交叉验证目的:为了让被评估的模型更加准确可信 2、什么是交叉验证(cross validation) 交叉验证:将拿到的训练数据,分为训练和验证集。以下图为例:将数据分成4份,其中一份作为验证集。然后经过…...

2023-10-17 mysql-配置主从-记录
摘要: 2023-10-17 mysql-配置主从-记录 参考: mysql配置主从_mysql主从配置_Tyler唐的博客-CSDN博客 master: 环境: 192.168.74.128mysql8/etc/my.cnf.d/mysql-server.cnf # # This group are read by MySQL server. # Use it for options that only the server (but not cli…...
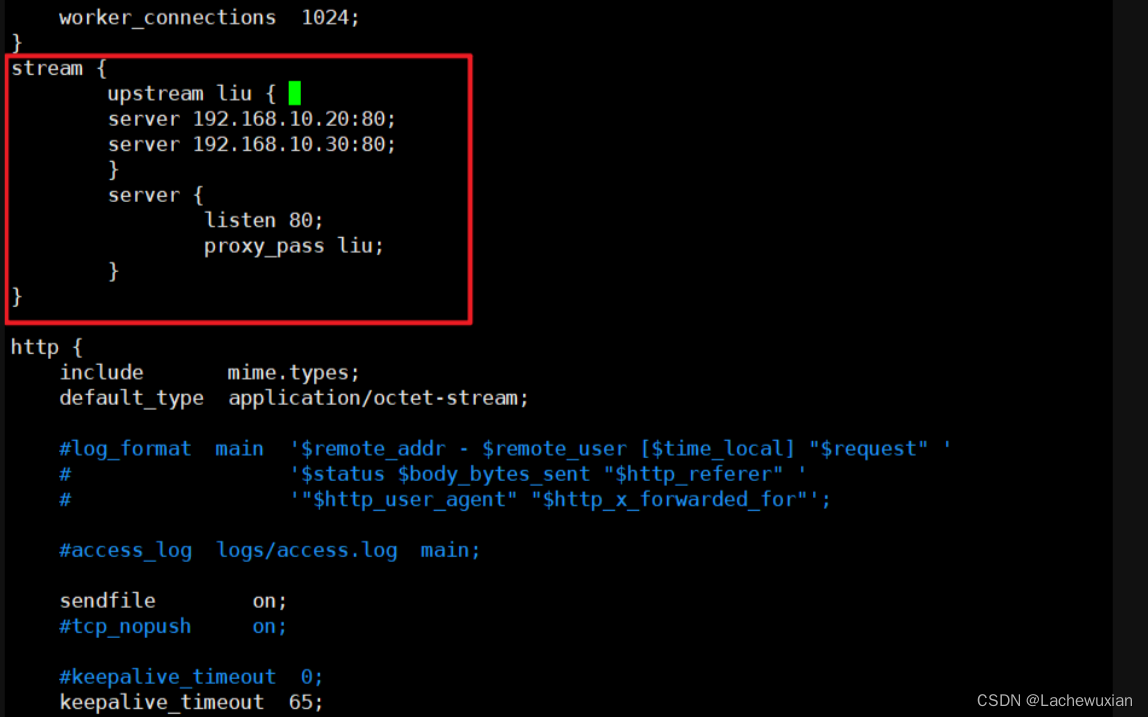
正向代理与反向代理
正向代理 客户端想要直接与目标服务器连接,但是无法直接进行连接,就需要先去访问中间的代理服务器,让代理服务器代替客户端去访问目标服务器 反向代理 屏蔽掉服务器的信息,经常用在多台服务器的分布式部署上,像一些大型…...
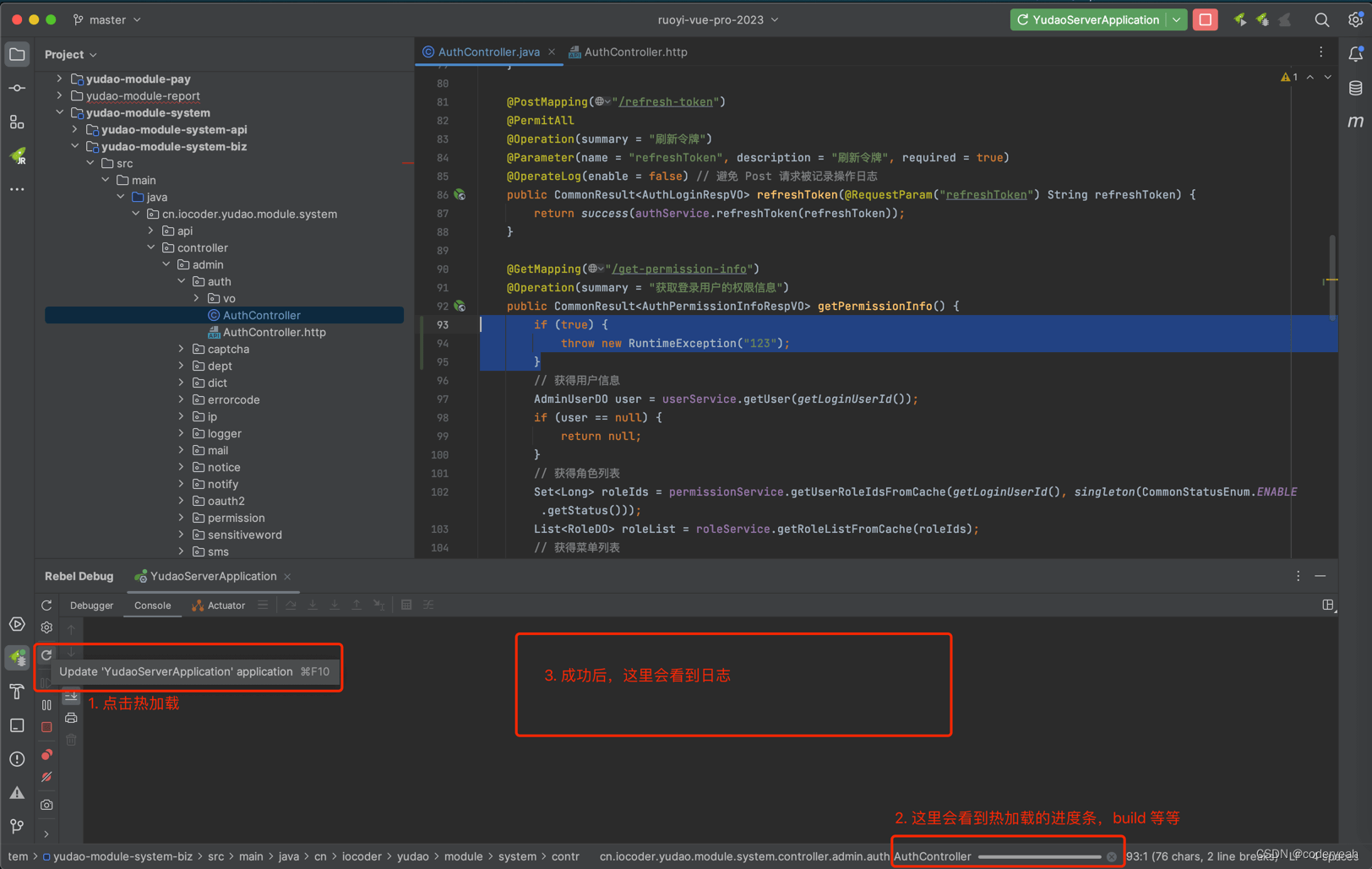
idea热加载,JRebel 插件是目前最好用的热加载插件,它支持 IDEA Ultimate 旗舰版、Community 社区版
1.如何安装 ① 点击 https://plugins.jetbrains.com/plugin/4441-jrebel-and-xrebel/versions 地址,下载 2022.4.1 版本。如下图所示: ② 打开 [Preference -> Plugins] 菜单,点击「Install Plugin from Disk…」按钮,选择刚下…...
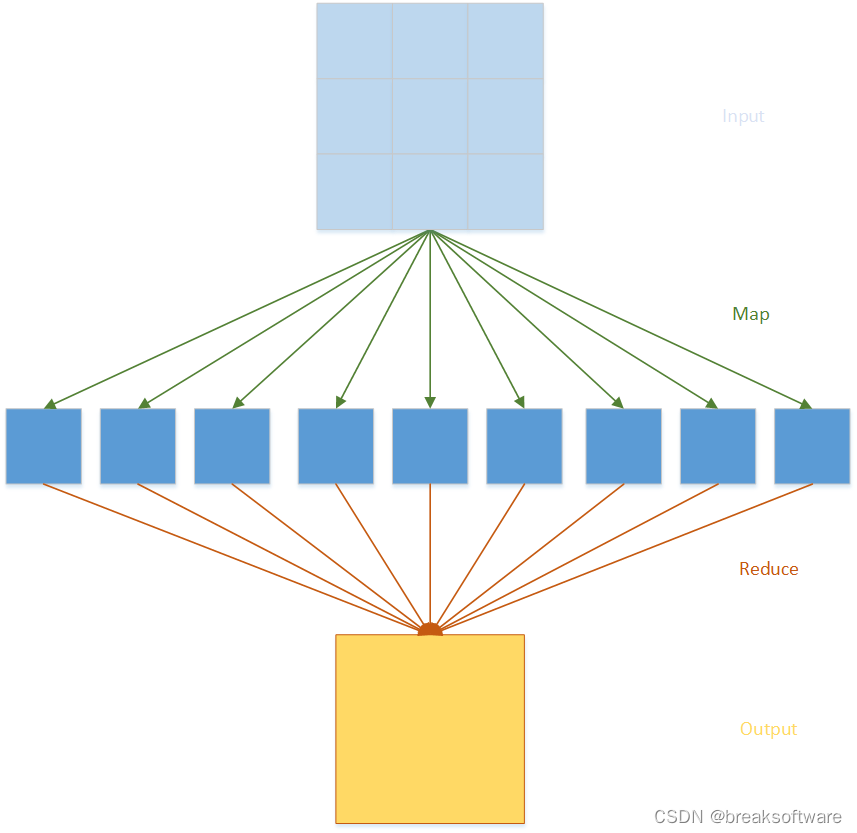
0基础学习PyFlink——Map和Reduce函数处理单词统计
在很多讲解大数据的案例中,往往都会以一个单词统计例子来抛砖引玉。本文也不免俗,例子来源于PyFlink的《Table API Tutorial》,我们会通过几种方式统计不同的单词出现的个数,从而达到循序渐进的学习效果。 常规方法 # input.py …...

在 Ubuntu 22.04安装配置 Ansible
一、按官网指引安装 我使用的ubuntu22.04版本,使用apt安装。官网指引如下: $ sudo apt-get install software-properties-common $ sudo apt-add-repository ppa:ansible/ansible $ sudo apt-get update $ sudo apt-get install ansible 由于内部网络…...
:数据模型)
【大数据 - Doris 实践】数据表的基本使用(三):数据模型
数据表的基本使用(三):数据模型 1.Aggregate 模型1.1 例一:导入数据聚合1.2 例二:保留明细数据1.3 例三:导入数据与已有数据聚合 2.Uniq 模型3.Duplicate 模型4.数据模型的选择建议5.聚合模型的局限性 Dori…...

PMP和CSPM证书,怎么选?
最近有宝子们在问,从事项目管理行业到底建议考什么证书?是不是CSPM证书一出来,PMP证书就没用了?其实不是。今天胖圆给大家解释一下二者都适合什么人群考~ PMP证书是什么? PMP项目管理专业人士资格认证,由…...

企业宣传为何要重视领军人物包装?领军人物对企业营销的价值和作用分析
在企业的完整形象中,产品、品牌、高管是最重要的组成部分。而大部分企业会把品牌形象放在首位,将公司所有的推广资源都倾斜在这一块,但其实,企业高管形象的塑造和传播也非常重要。小马识途建议中小企业在成长过程中提早对高管形象…...

什么是内存泄漏?JavaScript 垃圾回收机制原理及方式有哪些?哪些操作会造成内存泄漏?
1、什么是内存泄漏? 内存泄漏是前端开发中的一个常见问题,可能导致项目变得缓慢、不稳定甚至崩溃。内存泄漏是指不再用到的内存没有及时被释放,从而造成内存上的浪费。 2、 JavaScript 垃圾回收机制 1) 原理: JavaS…...

C++项目实战——基于多设计模式下的同步异步日志系统-⑫-日志宏全局接口设计(代理模式)
文章目录 专栏导读日志宏&全局接口设计全局接口测试项目目录结构整理示例代码拓展示例代码 专栏导读 🌸作者简介:花想云 ,在读本科生一枚,C/C领域新星创作者,新星计划导师,阿里云专家博主,C…...

京东数据接口:京东数据分析怎么做?
电商运营中数据分析的重要性不言而喻,而想要做数据分析,就要先找到数据,利用数据接口我们能够更轻松的获得比较全面的数据。因此,目前不少品牌商家都选择使用一些数据接口来获取相关电商数据、以更好地做好数据分析。 鲸参谋电商…...

从零到一:手把手完成Keil5 MDK环境搭建与ST-LINK驱动配置
1. 开发环境搭建前的准备工作 第一次接触STM32开发的朋友们,看到各种专业术语可能会有点懵。别担心,我刚开始也是这样。咱们先理清几个基本概念:Keil MDK是ARM公司推出的专业嵌入式开发工具,ST-LINK则是ST官方推出的调试下载器。…...

BiliTools终极指南:2026年最强大的免费哔哩哔哩下载工具
BiliTools终极指南:2026年最强大的免费哔哩哔哩下载工具 【免费下载链接】BiliTools A cross-platform bilibili toolbox. 跨平台哔哩哔哩工具箱,支持下载视频、番剧等等各类资源 项目地址: https://gitcode.com/GitHub_Trending/bilit/BiliTools …...

Windows资源管理器STL缩略图革命:3D模型可视化管理的终极解决方案
Windows资源管理器STL缩略图革命:3D模型可视化管理的终极解决方案 【免费下载链接】STL-thumbnail Shellextension for Windows File Explorer to show STL thumbnails 项目地址: https://gitcode.com/gh_mirrors/st/STL-thumbnail 还在为海量STL文件的管理而…...

瑞芯微-I2S | 音频驱动调试实战:从寄存器分析到音频环路测试
1. 瑞芯微I2S音频驱动调试全景指南 第一次接触瑞芯微平台的音频驱动调试时,我被各种专业术语和复杂的寄存器配置搞得晕头转向。经过多个项目的实战积累,我发现只要掌握正确的调试方法,音频驱动问题都能迎刃而解。本文将带你从底层寄存器分析开…...

用 Mass Change Wizard 批量治理 SAP S/4HANA Business Role
在 SAP S/4HANA Cloud 的权限治理里,最怕的不是创建一个 Business Role,而是系统上线一段时间后,几十个甚至上百个 Business Role 需要一起调整。业务团队说,财务共享中心要启用新的 SAP Fiori Launchpad Space。Basis 团队说,旧的自定义 Space 要逐步退出。审计团队又补了…...

点式玻璃幕墙及采光顶设计的一些想法
点式玻璃幕墙及采光顶设计的一些想法 点式玻璃幕墙是在主龙骨上面固定点支撑装置,由点支撑装置支撑玻璃面板的一种常用幕墙表现形式,他最早起源于国外。因为玻璃的通透性,建筑内外有效融合,空间感增强,开阔了视野,增加了建筑物的现代感。 点式玻璃幕墙最主要的组成部分是…...

从蓝牙4.2到5.4:广播包格式的‘进化史’与向后兼容那些坑
蓝牙广播协议演进史:从4.2到5.4的兼容性实战指南 当你的智能手表突然无法被旧款手机发现,或者工业传感器在新版本固件下出现广播丢包——这些看似简单的连接问题背后,往往隐藏着蓝牙协议版本迭代带来的兼容性暗礁。作为无线通信领域的"毛…...

2025年Mac菜单栏革命:Ice如何重塑你的桌面工作流
2025年Mac菜单栏革命:Ice如何重塑你的桌面工作流 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice 你是否曾因Mac菜单栏上的图标拥挤不堪而感到困扰?Wi-Fi、电池、时间等关键信…...

如何5分钟搭建个人离线小说库:番茄小说下载器终极指南
如何5分钟搭建个人离线小说库:番茄小说下载器终极指南 【免费下载链接】fanqienovel-downloader 下载番茄小说 项目地址: https://gitcode.com/gh_mirrors/fa/fanqienovel-downloader 你是否曾经遇到过这样的情况:在通勤路上网络突然中断…...

终极指南:5步掌握番茄小说下载器的完整使用方案
终极指南:5步掌握番茄小说下载器的完整使用方案 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 在数字阅读时代,我们常常面临一个共同的问题࿱…...