Unity Mono和.Net平台浮点算法的区别
static void TestFloat(){{//float speed=2.0f/20;float speed = 0.1f;float distance = 2.0f;long needTime = (long)(distance / speed);Log.Debug($"needTime={needTime}");
#if UNITY_EDITORif (needTime != 19)
#elseif (needTime != 20)//.Net服务器和安卓手机
#endifLog.Warning("平台浮点算法变了");}}static void TestFixInt(){{FixInt fi2 = 20000;FixInt fi1 = 10000;if (fi1 / fi2 != 0.5f){Log.Warning($"TestFixInt,{fi2}/{fi1} != 0.5");}}{FixInt fi2 = 20000;FixInt fi1 = 10000;if (fi2 / fi1 != 2){Log.Warning($"TestFixInt,{fi2}/{fi1} != 2");}}{const long l = 20000;FixInt fi = new(6000);if (l < fi){Log.Warning($"TestFixInt,{l} < {fi}");}}{FixInt fi3 = new(3);FixInt fi5 = new(5);if (fi3 + 1000 < fi5){Log.Warning($"TestFixInt,{fi3} , {fi5}");}}{const long l = 3000;FixInt fi = l;if (fi.RawLong != l){Log.Warning($"TestFixInt,{fi.RawLong} != {l}");}}}static void TestGetPolygonFormation(){var points = TeamFormationComponentSystem.GetPolygonFormation(new(),new() { x = 230.33540344238281f, y = -0.0000019073486328125f, z = 62.280677795410156f },new() { x = -6.1755828857421875f, y = -0.045724689960479736f, z = 9.5355415344238281f },4,2);List<float3> list = new(){new(){x = 230.429f, y = 0.0f, z = 62.135f },new(){ x = 233.077f, y = 0.0f, z = 60.689f },new(){ x = 233.317f, y = 0.0f, z = 57.679f },new(){ x = 230.669f, y = 0.0f, z = 59.125f },};if (points.Count != list.Count){Log.Warning($"TestGetPolygonFormation,{points} != {list}");}for (int i = 0; i <points.Count; ++i){var cal = points[i];var want = list[i];if (!cal.Equals(want)){Log.Warning($"TestGetPolygonFormation,{cal} != {want}");}}}static void TestGetPointOnEllipse(){var radius = 2.82842707633972f;var intervalAngle = 90;var radian = -32.9286422729492f + (intervalAngle * 3);var dChangZhouAngle = -45f;var xShaft = 0.5f * radius;var yShaft = 1f * radius;var ptCenter = new float2(231.872909545898f, 59.9066619873047f);var cal = VectorHelper.GetPointOnEllipse(ptCenter,xShaft,yShaft,radian,dChangZhouAngle); //算出旋转后的向量float3 want = new() { x = 230.669f, y = 0.0f, z = 59.125f };if (!cal.Equals(want)){Log.Warning($"TestGetPointOnEllipse,{cal} != {want}");}}static void TestMath(){var radius = 2.82842707633972f;var intervalAngle = 90;var radian = -32.9286422729492f + (intervalAngle * 3);var dChangZhouAngle = -45f;var xShaft = 0.5f * radius;var yShaft = 1f * radius;var ptCenter = new float2(231.872909545898f, 59.9066619873047f);radian -= dChangZhouAngle;dChangZhouAngle *= VectorHelper.Mathf.Deg2Rad;radian *= VectorHelper.Mathf.Deg2Rad;float dLiXin = math.atan2(yShaft * math.sin(radian), xShaft * math.cos(radian)); //离心角if (dLiXin != -1.46427190303802f){Log.Warning($"TestMath,{dLiXin} ");}if (yShaft != 2.8284270763397221f){Log.Warning($"TestMath,{yShaft} ");}if (dLiXin != -1.4642719030380249f){Log.Warning($"TestMath,{dLiXin} ");}if (dChangZhouAngle != -0.78539818525314298f){Log.Warning($"TestMath,{dChangZhouAngle} ");}if (xShaft != 1.4142135381698611f){Log.Warning($"TestMath,{xShaft} ");}var cosLiXin = math.cos(dLiXin);var sinChangZhouAngle = math.sin(dChangZhouAngle);var sinLiXin = math.sin(dLiXin);var cosChangZhouAngle = math.cos(dChangZhouAngle);if (cosLiXin != 0.10632307827472701f){Log.Warning($"TestMath,{xShaft} ");}if (sinChangZhouAngle != -0.70710676908492998f){Log.Warning($"TestMath,{xShaft} ");}if (sinLiXin != -0.99433165788650502f){Log.Warning($"TestMath,{xShaft} ");}if (cosChangZhouAngle != 0.70710676908492998f){Log.Warning($"TestMath,{xShaft} ");}var x = yShaft * cosLiXin * sinChangZhouAngle + xShaft * sinLiXin * cosChangZhouAngle + ptCenter.x;
#if UNITY_EDITORif (x != 230.665939331055f)
#elseif (x != 230.66592407226563f)
#endif{Log.Warning($"平台浮点加法或乘法算法变了,{x} ");}float y = yShaft * math.cos(dLiXin) * math.cos(dChangZhouAngle) - xShaft * math.sin(dLiXin) * math.sin(dChangZhouAngle) + ptCenter.y;}结论
.Net和安卓手机IL2CPP算法相同
Windows下Unity的Mono算法不同,就它不同
相关文章:

Unity Mono和.Net平台浮点算法的区别
static void TestFloat(){{//float speed2.0f/20;float speed 0.1f;float distance 2.0f;long needTime (long)(distance / speed);Log.Debug($"needTime{needTime}"); #if UNITY_EDITORif (needTime ! 19) #elseif (needTime ! 20)//.Net服务器和安卓手机 #endif…...
】64 - QNX 与 Android GVM 显示 Dump 图片方法汇总)
【SA8295P 源码分析 (二)】64 - QNX 与 Android GVM 显示 Dump 图片方法汇总
【SA8295P 源码分析】64 - QNX 与 Android GVM 显示 Dump 图片方法汇总 一、QNX侧1.1 surfacedump 功能1.2 screenshot 功能二、Android GVM 侧2.1 screencap -p 导出 PNG 图片2.2 screencap 不加 -p 参数,导出 RGB32 图片2.3 dumpsys SurfaceFlinger --display-id 方法系列文…...
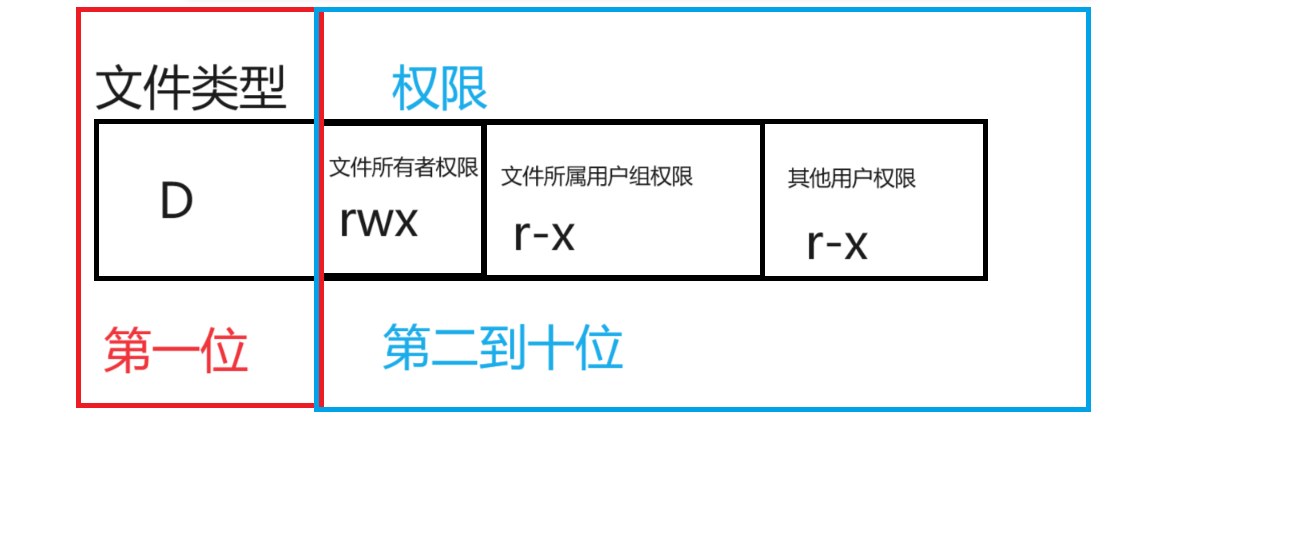
shell命令以及运行原理和lLinux权限
shell命令以及运行原理 什么是shell shell是操作系统的外壳程序统称,我们是通过shell去和操作系统沟通的。 从技术角度,shell最简单的定义就是命令行解释器,主要包含两个功能: 将使用者的命令翻译给核心处理 将核心的处理结果…...
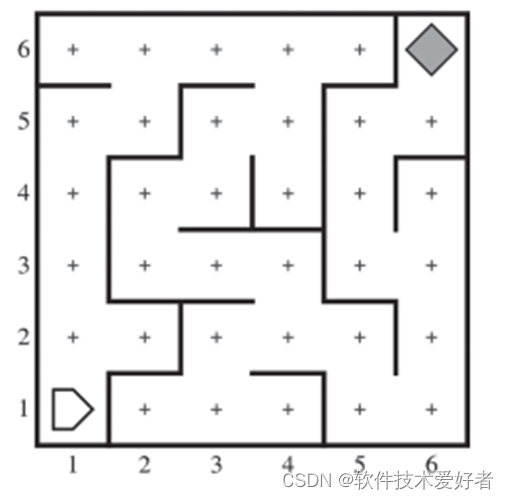
斯坦福JSKarel编程机器人使用介绍
斯坦福JSKarel编程机器人使用介绍 为了避免被编程语言固有的复杂性所困扰,有一个被称为卡雷尔(Karel)机器人的微型世界(microworld)的简化环境,可以让编程初学者从中学习理解编程的基本概念,而…...

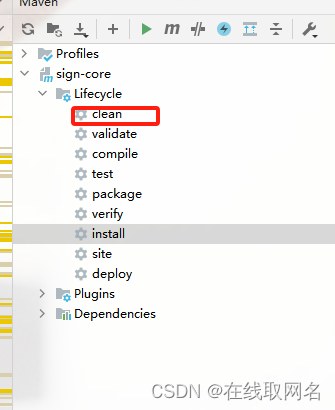
SpringBoot中pom.xml不引入依赖, 怎么使用parent父项目的依赖
在Spring Boot项目中,如果你想使用父项目的依赖,而不想在pom.xml中显式引入依赖,你可以使用Maven的继承机制。 首先,确保你的Spring Boot项目是一个子项目,即它继承自一个父项目。要实现这一点,在pom.xml文…...

基于vue3+ts5+vue-router4+pinia2的PC端项目搭建教程
导语:在日常开发中,有时候会在项目中引入 ts 来解决一些 js 的问题,下面就简单介绍一下如何使用 vue3tsrouterpinia 来搭建一个项目。 目录 简介创建安装配置实战 简介 vue3 目前是常用的 vue 版本,提供了组合式 API 以及一些新…...
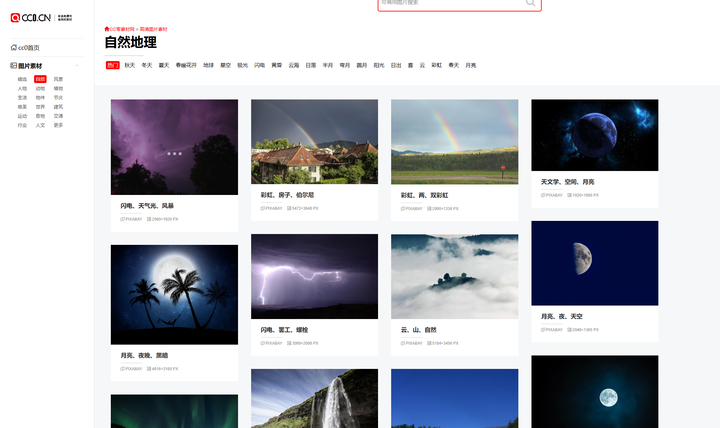
6个无版权、免费、高清图片素材库
找免费无版权图片素材,就上这6个网站,超高质量,可商用,赶紧收藏! 1、菜鸟图库 https://www.sucai999.com/pic.html?vNTYwNDUx 网站主要为新手设计师提供免费素材,这些素材的质量都很高,类别也…...

什么是响应式设计?响应式设计的基本原理是什么?如何兼容低版本的 IE?
什么是响应式设计: 响应式设计(Responsive Design)是一种Web设计和开发方法,旨在使网站在不同设备和屏幕尺寸上都能提供一致的用户体验。响应式设计的目标是适应多种终端,包括桌面计算机、笔记本电脑、平板电脑和移动设备&#x…...

LeetCode 2906. 构造乘积矩阵【前后缀分解,数组】中等
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...

vue3+koa+axios实现前后端通信
vue3koaaxios实现前后端通信 写了一个小demo来实现前后端通信,涉及跨域问题,非常简单可以给大家平时开发的时候参考 服务端: 目录结构如下: router index.js // router的入口文件 // 引入路由 const Router require("koa-router&quo…...
Required MultipartFile parameter ‘file‘ is not present
出现这个原因我们首先想到的是加一个RequestParam("file"),但是还有可能的原因是因为我们的名字有错误 <span class"input-group-addon must">模板上传 </span> <input id"uploadFileUpdate" name"importFileU…...

vue3后台管理系统之layout组件的搭建
1.1静态布局 <template><div class"layout_container"><!-- 左侧导航 --><div class"layout_slider"></div><!-- 顶部导航 --><div class"layout_tabbar"></div><!-- 内容展示区 --><…...
Minio 文件上传(后端处理同文件判断,同一文件秒传)
记录minio 文件上传 MinIO提供多个语言版本SDK的支持,下边找到java版本的文档: 地址:https://docs.min.io/docs/java-client-quickstart-guide.html maven依赖如下: XML <dependency><groupId>io.minio</groupId…...
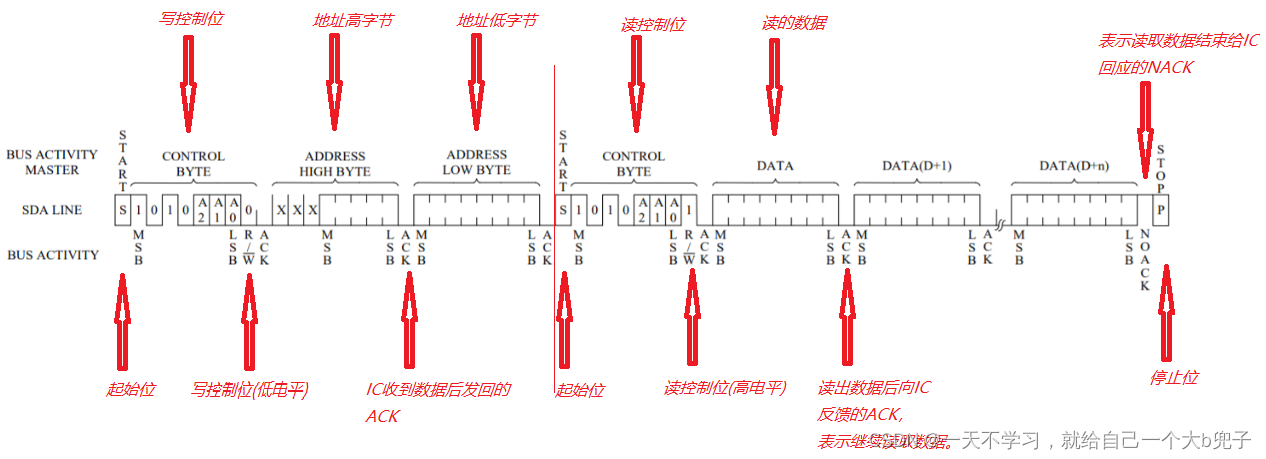
模拟IIC通讯协议(stm32)(硬件iic后面在补)
一、IIC基础知识总结。 1、IIC通讯需要两条线就可以,SCL、SDA。 2、IIC的数据传输的速率,不同的ic是不同的,根据电平维持的延时函数的时间来确定IIC数据传输的速率. 3、IIC的延时函数可以使用延时函数,延时函数一般使用系统滴答时…...

使用注解读取properties配置文件
文章目录 1、背景2、注解方式2.1 PropertySource 、 ConfigurationProperties2.2 读取properties中全部字段值ConfigurationProperties2.3 读取properties中部分字段值:value("${自定义key}") 1、背景 服务中使用到了redis,需要配置redis连接…...

Python---练习:求世界杯小组赛的总成绩(涉及:布尔类型转换为整型)
案例 世界杯案例 需求: 世界杯案例,世界杯小组赛的比赛规则是我们的球队与其他三支球队进行比赛,然后根据总成绩(积分)确定出线资格。小组赛球队实力已知(提示用户输入各球队实力),我们通过一个数字表示。如果我们赢…...

vue3学习源码笔记(小白入门系列)------KeepAlive 原理
目录 说明组件是如何被缓存的,什么时候被激活对于KeepAlive 中组件 如何完成激活的对于KeepAlive 中组件 如何完成休眠的 总结 说明 Vue 内置了 KeepAlive 组件,实现缓存多个组件实例切换时,完成对卸载组件实例的缓存,从而使得组…...
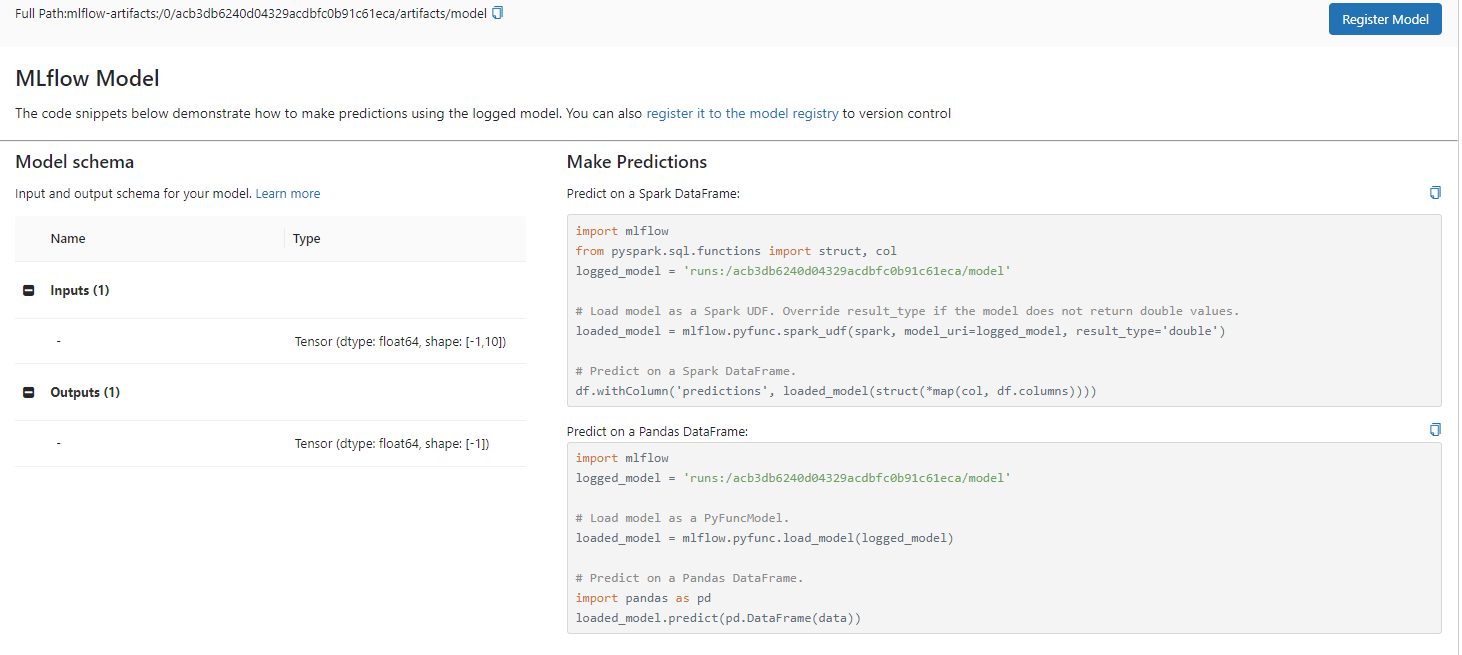
边写代码边学习之mlflow
1. 简介 MLflow 是一个多功能、可扩展的开源平台,用于管理整个机器学习生命周期的工作流程和工件。 它与许多流行的 ML 库内置集成,但可以与任何库、算法或部署工具一起使用。 它被设计为可扩展的,因此您可以编写插件来支持新的工作流程、库和…...

基于吉萨金字塔建造优化的BP神经网络(分类应用) - 附代码
基于吉萨金字塔建造优化的BP神经网络(分类应用) - 附代码 文章目录 基于吉萨金字塔建造优化的BP神经网络(分类应用) - 附代码1.鸢尾花iris数据介绍2.数据集整理3.吉萨金字塔建造优化BP神经网络3.1 BP神经网络参数设置3.2 吉萨金字…...

axios的post请求所有传参方式
Axios支持多种方式来传递参数给POST请求。以下是一些常见的方式: 作为请求体: 你可以将参数作为请求体的一部分,通常用于发送表单数据或JSON数据。例如: const data { key1: value1, key2: value2 }; axios.post(/api/endpoint, …...

一码一物的生成软件,为什么总能先把窜货和返利黑洞堵住?
一码一物的生成软件,为什么总能先把窜货和返利黑洞堵住?很多老板嘴上说生意难做,真把账摊开看,难的不是卖不出去,而是货卖到哪儿不知道、钱花给谁不清楚、促销有没有真拉动更说不明白。一码一物的生成软件,…...
提供格式修正与LaTeX适配功能)
自动化论文生成方案:7款工具(爱毕业aibiye等)提供格式修正与LaTeX适配功能
工具快速对比排名(前7推荐) 工具名称 核心功能亮点 处理时间 适配平台 aibiye 学生/编辑双模式降AIGC 1分钟 知网、万方等 aicheck AI痕迹精准弱化查重一体 ~20分钟 知网、格子达、维普 askpaper AIGC率个位数优化 ~20分钟 高校检测规则通…...

10分钟零成本搭建KIMI AI免费API:个人智能助手完整指南
10分钟零成本搭建KIMI AI免费API:个人智能助手完整指南 【免费下载链接】kimi-free-api 🚀 KIMI AI 长文本大模型逆向API【特长:长文本解读整理】,支持高速流式输出、智能体对话、联网搜索、探索版、K1思考模型、长文档解读、图像…...

OpenClaw+Qwen3-4B创意助手:自动生成营销文案与设计建议
OpenClawQwen3-4B创意助手:自动生成营销文案与设计建议 1. 为什么需要个人创意助手? 去年夏天,我接手了一个小型咖啡品牌的社交媒体运营工作。每天需要产出5-6条不同风格的文案,还要设计配套的视觉方案。连续两周后,…...

N16 LCD
一、LCD简介LCD 液晶显示屏。i.MX6ULL 里驱动它的模块叫:eLCDIF Enhanced LCD Interface(增强型 LCD 接口,芯片内置的硬件控制器)分辨率:1920 * 1080 1280*720色域:帧率/刷新率:LCD 扫…...

WPF高性能绘图避坑指南:为什么你的心电图曲线会让CPU飙升?
WPF高性能绘图避坑指南:为什么你的心电图曲线会让CPU飙升? 在医疗监护设备或金融行情系统中,实时波形渲染的卡顿可能直接导致误诊或交易延迟。当你的WPF应用在绘制每秒60帧的心电图时突然出现CPU占用率突破90%,这往往不是硬件性能…...
)
泛微Ecology数据库小白必看:三张表搞定待办、已办、办结查询(附完整SQL及字段解释)
泛微Ecology流程查询实战指南:从表结构到SQL优化的完整解析 引言 在日常办公自动化管理中,泛微Ecology系统作为国内主流的工作流平台,承载着企业大量业务流程的运转。但对于刚接触系统管理的技术人员来说,面对复杂的数据库表结构和…...

新手福音:在快马平台交互式学习openclaw更新命令语法与参数
作为一名刚接触openclaw的新手,我最初看到那些复杂的命令行参数时简直一头雾水。直到发现了InsCode(快马)平台,它用可视化的方式帮我拆解了openclaw更新命令的每个细节,现在终于能自信地操作了。下面分享我的学习心得: 命令结构拆…...

革新性突破:Mac百度网盘下载速度解放方案
革新性突破:Mac百度网盘下载速度解放方案 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS BaiduNetdiskPlugin-macOS是一款专为Mac用户设计的…...

2026长沙GEO优化公司权威实测:基于稳定性与转化效率的TOP5服务商深度推荐
2026长沙GEO优化公司权威实测:基于稳定性与转化效率的TOP5服务商深度推荐2026年,生成式AI搜索已深度重塑商业决策与品牌获客的路径。在全国GEO(生成式引擎优化)的版图中,长沙凭借活跃的数字经济生态与扎实的产业基础&a…...