分布式算法 - Raft算法
Paxos是出了名的难懂,而Raft正是为了探索一种更易于理解的一致性算法而产生的。它的首要设计目的就是易于理解,所以在选主的冲突处理等方式上它都选择了非常简单明了的解决方案。
推荐阅读
提示
强烈推荐通过如下资料学习raft。
raft.github.io
这里面有一个Raft Visualization:
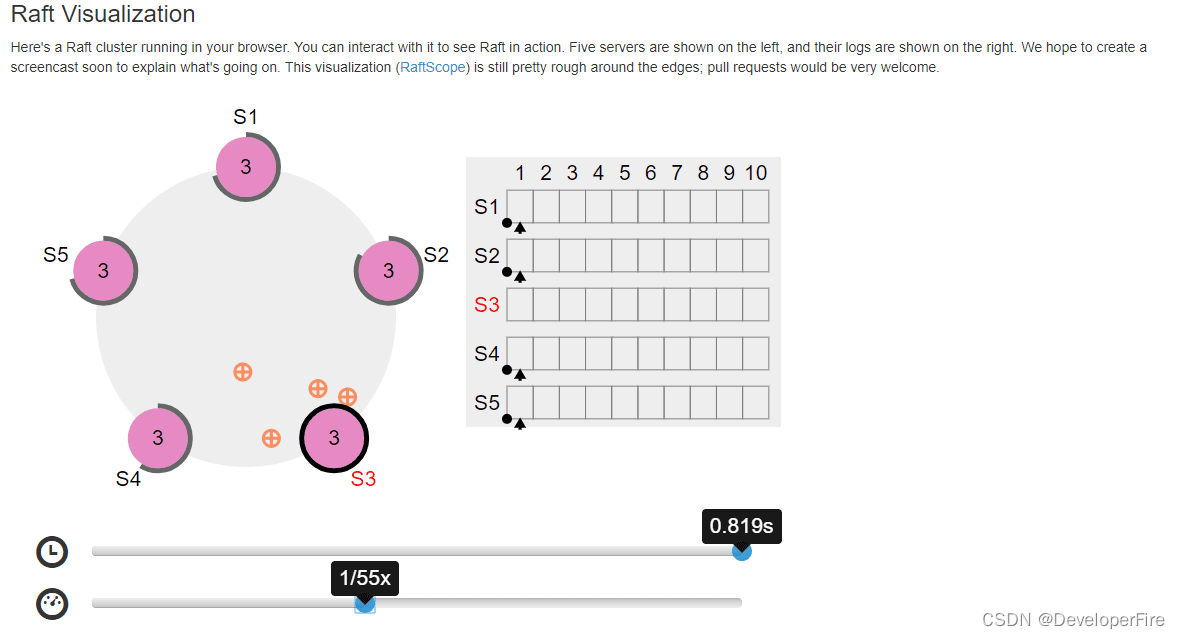
In Search of an Understandable Consensus Algorithm
动画理解Raft神器
Raft算法简介
不同于Paxos算法直接从分布式一致性问题出发推导出来,Raft算法则是从多副本状态机的角度提出,用于管理多副本状态机的日志复制。Raft实现了和Paxos相同的功能,它将一致性分解为多个子问题: Leader选举(Leader election)、日志同步(Log replication)、安全性(Safety)、日志压缩(Log compaction)、成员变更(Membership change)等。同时,Raft算法使用了更强的假设来减少了需要考虑的状态,使之变的易于理解和实现。
角色
Raft将系统中的角色分为领导者(Leader)、跟从者(Follower)和候选人(Candidate):
Leader: 接受客户端请求,并向Follower同步请求日志,当日志同步到大多数节点上后告诉Follower提交日志。
Follower: 接受并持久化Leader同步的日志,在Leader告之日志可以提交之后,提交日志。
Candidate: Leader选举过程中的临时角色。
Raft要求系统在任意时刻最多只有一个Leader,正常工作期间只有Leader和Followers。
角色状态转换

Follower只响应其他服务器的请求。如果Follower超时没有收到Leader的消息,它会成为一个Candidate并且开始一次Leader选举。收到大多数服务器投票的Candidate会成为新的Leader。Leader在宕机之前会一直保持Leader的状态。
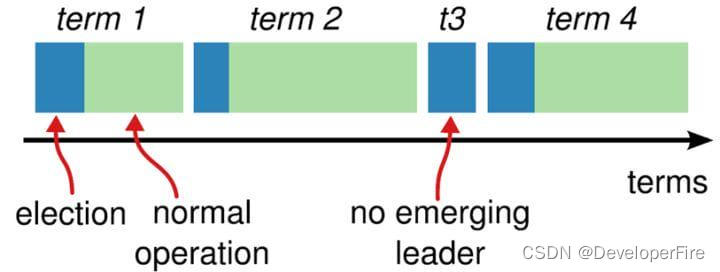
Raft算法将时间分为一个个的任期(term),每一个term的开始都是Leader选举。在成功选举Leader之后,Leader会在整个term内管理整个集群。如果Leader选举失败,该term就会因为没有Leader而结束。
Raft算法子问题
Raft实现了和Paxos相同的功能,它将一致性分解为多个子问题: Leader选举(Leader election)、日志同步(Log replication)、安全性(Safety)、日志压缩(Log compaction)、成员变更(Membership change)等
Leader选举
Raft 使用心跳(heartbeat)触发Leader选举。当服务器启动时,初始化为Follower。Leader向所有Followers周期性发送heartbeat。如果Follower在选举超时时间内没有收到Leader的heartbeat,就会等待一段随机的时间后发起一次Leader选举。
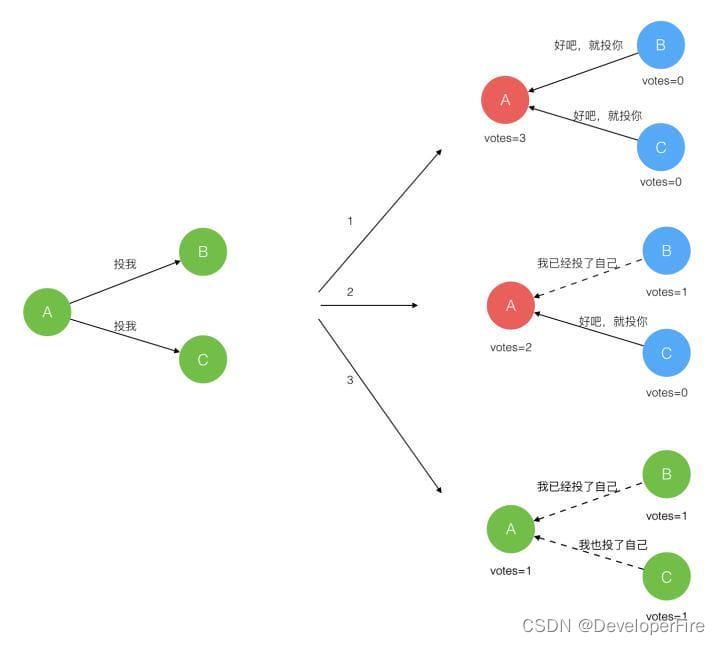
Follower将其当前term加一然后转换为Candidate。它首先给自己投票并且给集群中的其他服务器发送 RequestVote RPC (RPC细节参见八、Raft算法总结)。结果有以下三种情况:
赢得了多数的选票,成功选举为Leader;
收到了Leader的消息,表示有其它服务器已经抢先当选了Leader;
没有服务器赢得多数的选票,Leader选举失败,等待选举时间超时后发起下一次选举。
选举出Leader后,Leader通过定期向所有Followers发送心跳信息维持其统治。若Follower一段时间未收到Leader的心跳则认为Leader可能已经挂了,再次发起Leader选举过程。
Raft保证选举出的Leader上一定具有最新的已提交的日志,这一点将在四、安全性中说明。
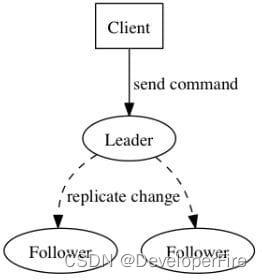
日志同步
Leader选出后,就开始接收客户端的请求。Leader把请求作为日志条目(Log entries)加入到它的日志中,然后并行的向其他服务器发起 AppendEntries RPC (RPC细节参见八、Raft算法总结)复制日志条目。当这条日志被复制到大多数服务器上,Leader将这条日志应用到它的状态机并向客户端返回执行结果。
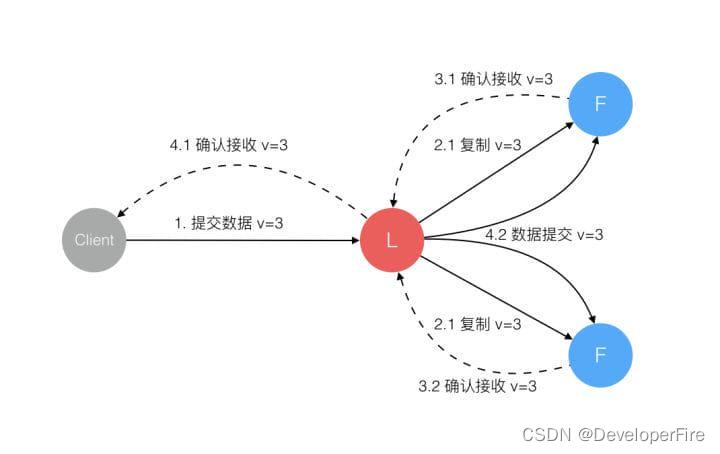
某些Followers可能没有成功的复制日志,Leader会无限的重试 AppendEntries RPC直到所有的Followers最终存储了所有的日志条目。
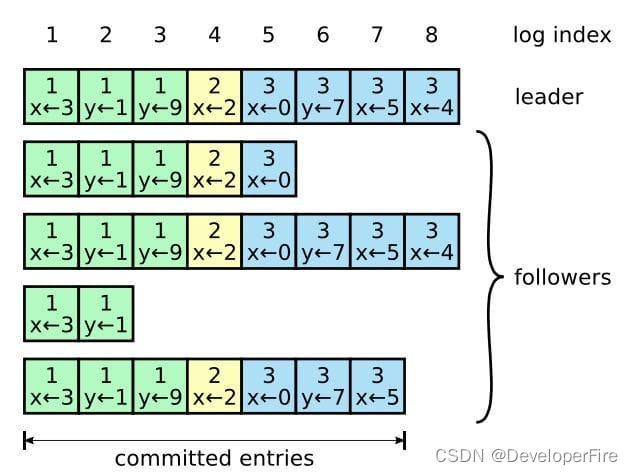
日志由有序编号(log index)的日志条目组成。每个日志条目包含它被创建时的任期号(term),和用于状态机执行的命令。如果一个日志条目被复制到大多数服务器上,就被认为可以提交(commit)了。
Raft日志同步保证如下两点:
如果不同日志中的两个条目有着相同的索引和任期号,则它们所存储的命令是相同的。
如果不同日志中的两个条目有着相同的索引和任期号,则它们之前的所有条目都是完全一样的。
第一条特性源于Leader在一个term内在给定的一个log index最多创建一条日志条目,同时该条目在日志中的位置也从来不会改变。
第二条特性源于 AppendEntries 的一个简单的一致性检查。当发送一个 AppendEntries RPC 时,Leader会把新日志条目紧接着之前的条目的log index和term都包含在里面。如果Follower没有在它的日志中找到log index和term都相同的日志,它就会拒绝新的日志条目。
一般情况下,Leader和Followers的日志保持一致,因此 AppendEntries 一致性检查通常不会失败。然而,Leader崩溃可能会导致日志不一致: 旧的Leader可能没有完全复制完日志中的所有条目。
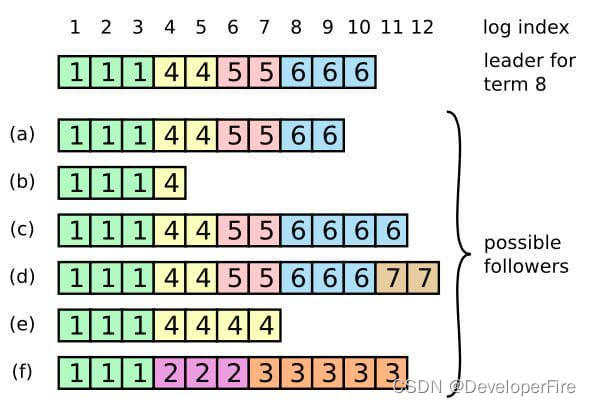
上图阐述了一些Followers可能和新的Leader日志不同的情况。一个Follower可能会丢失掉Leader上的一些条目,也有可能包含一些Leader没有的条目,也有可能两者都会发生。丢失的或者多出来的条目可能会持续多个任期。
Leader通过强制Followers复制它的日志来处理日志的不一致,Followers上的不一致的日志会被Leader的日志覆盖。
Leader为了使Followers的日志同自己的一致,Leader需要找到Followers同它的日志一致的地方,然后覆盖Followers在该位置之后的条目。
Leader会从后往前试,每次AppendEntries失败后尝试前一个日志条目,直到成功找到每个Follower的日志一致位点,然后向后逐条覆盖Followers在该位置之后的条目。
安全性
Raft增加了如下两条限制以保证安全性:
拥有最新的已提交的log entry的Follower才有资格成为Leader。
这个保证是在RequestVote RPC中做的,Candidate在发送RequestVote RPC时,要带上自己的最后一条日志的term和log index,其他节点收到消息时,如果发现自己的日志比请求中携带的更新,则拒绝投票。日志比较的原则是,如果本地的最后一条log entry的term更大,则term大的更新,如果term一样大,则log index更大的更新。
Leader只能推进commit index来提交当前term的已经复制到大多数服务器上的日志,旧term日志的提交要等到提交当前term的日志来间接提交(log index 小于 commit index的日志被间接提交)。
之所以要这样,是因为可能会出现已提交的日志又被覆盖的情况:
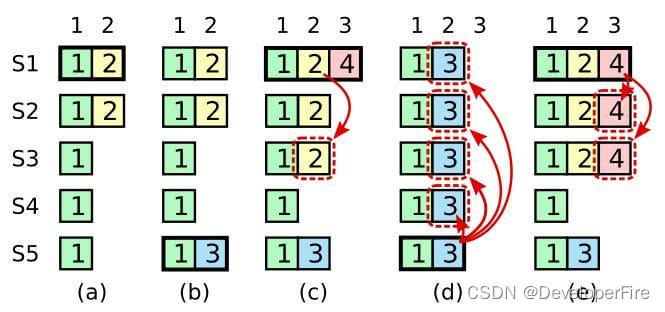
在阶段a,term为2,S1是Leader,且S1写入日志(term, index)为(2, 2),并且日志被同步写入了S2;
在阶段b,S1离线,触发一次新的选主,此时S5被选为新的Leader,此时系统term为3,且写入了日志(term, index)为(3, 2);
S5尚未将日志推送到Followers就离线了,进而触发了一次新的选主,而之前离线的S1经过重新上线后被选中变成Leader,此时系统term为4,此时S1会将自己的日志同步到Followers,按照上图就是将日志(2, 2)同步到了S3,而此时由于该日志已经被同步到了多数节点(S1, S2, S3),因此,此时日志(2,2)可以被提交了。;
在阶段d,S1又下线了,触发一次选主,而S5有可能被选为新的Leader(这是因为S5可以满足作为主的一切条件: 1. term = 5 > 4,2. 最新的日志为(3,2),比大多数节点(如S2/S3/S4的日志都新),然后S5会将自己的日志更新到Followers,于是S2、S3中已经被提交的日志(2,2)被截断了。
增加上述限制后,即使日志(2,2)已经被大多数节点(S1、S2、S3)确认了,但是它不能被提交,因为它是来自之前term(2)的日志,直到S1在当前term(4)产生的日志(4, 4)被大多数Followers确认,S1方可提交日志(4,4)这条日志,当然,根据Raft定义,(4,4)之前的所有日志也会被提交。此时即使S1再下线,重新选主时S5不可能成为Leader,因为它没有包含大多数节点已经拥有的日志(4,4)。
日志压缩
在实际的系统中,不能让日志无限增长,否则系统重启时需要花很长的时间进行回放,从而影响可用性。Raft采用对整个系统进行snapshot来解决,snapshot之前的日志都可以丢弃。
每个副本独立的对自己的系统状态进行snapshot,并且只能对已经提交的日志记录进行snapshot。
Snapshot中包含以下内容:
日志元数据。最后一条已提交的 log entry的 log index和term。这两个值在snapshot之后的第一条log entry的AppendEntries RPC的完整性检查的时候会被用上。
系统当前状态。
当Leader要发给某个日志落后太多的Follower的log entry被丢弃,Leader会将snapshot发给Follower。或者当新加进一台机器时,也会发送snapshot给它。发送snapshot使用InstalledSnapshot RPC。
做snapshot既不要做的太频繁,否则消耗磁盘带宽, 也不要做的太不频繁,否则一旦节点重启需要回放大量日志,影响可用性。推荐当日志达到某个固定的大小做一次snapshot。
做一次snapshot可能耗时过长,会影响正常日志同步。可以通过使用copy-on-write技术避免snapshot过程影响正常日志同步。
成员变更
成员变更是在集群运行过程中副本发生变化,如增加/减少副本数、节点替换等。
成员变更也是一个分布式一致性问题,既所有服务器对新成员达成一致。但是成员变更又有其特殊性,因为在成员变更的一致性达成的过程中,参与投票的进程会发生变化。
如果将成员变更当成一般的一致性问题,直接向Leader发送成员变更请求,Leader复制成员变更日志,达成多数派之后提交,各服务器提交成员变更日志后从旧成员配置(Cold)切换到新成员配置(Cnew)。
因为各个服务器提交成员变更日志的时刻可能不同,造成各个服务器从旧成员配置(Cold)切换到新成员配置(Cnew)的时刻不同。
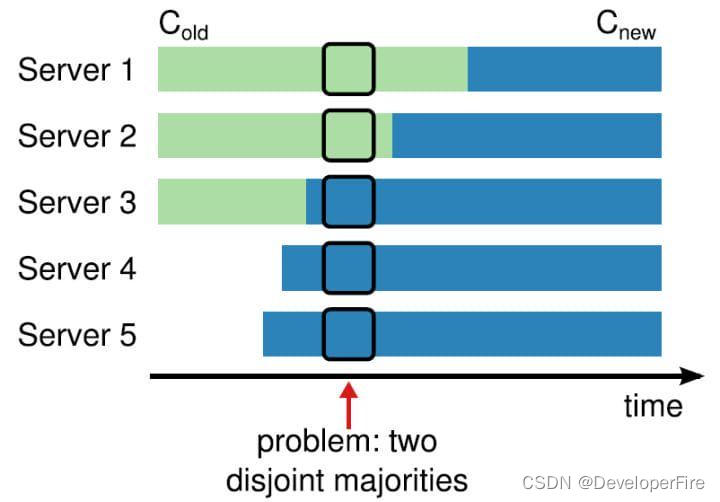
成员变更不能影响服务的可用性,但是成员变更过程的某一时刻,可能出现在Cold和Cnew中同时存在两个不相交的多数派,进而可能选出两个Leader,形成不同的决议,破坏安全性。
由于成员变更的这一特殊性,成员变更不能当成一般的一致性问题去解决。
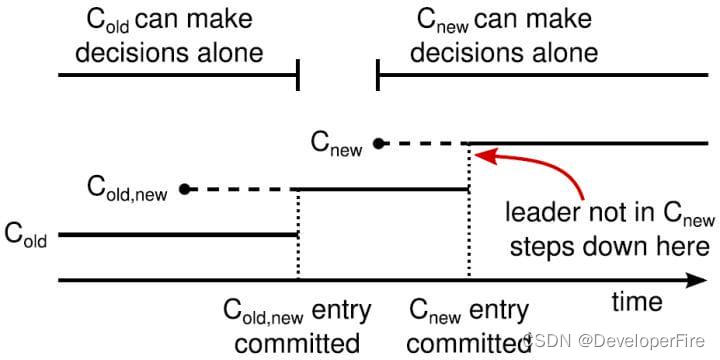
为了解决这一问题,Raft提出了两阶段的成员变更方法。集群先从旧成员配置Cold切换到一个过渡成员配置,称为共同一致(joint consensus),共同一致是旧成员配置Cold和新成员配置Cnew的组合Cold U Cnew,一旦共同一致Cold U Cnew被提交,系统再切换到新成员配置Cnew。
Raft两阶段成员变更过程如下:
Leader收到成员变更请求从Cold切成Cnew;
eader在本地生成一个新的log entry,其内容是Cold∪Cnew,代表当前时刻新旧成员配置共存,写入本地日志,同时将该log entry复制至Cold∪Cnew中的所有副本。在此之后新的日志同步需要保证得到Cold和Cnew两个多数派的确认;
Follower收到Cold∪Cnew的log entry后更新本地日志,并且此时就以该配置作为自己的成员配置;
如果Cold和Cnew中的两个多数派确认了Cold U Cnew这条日志,Leader就提交这条log entry;
接下来Leader生成一条新的log entry,其内容是新成员配置Cnew,同样将该log entry写入本地日志,同时复制到Follower上;
Follower收到新成员配置Cnew后,将其写入日志,并且从此刻起,就以该配置作为自己的成员配置,并且如果发现自己不在Cnew这个成员配置中会自动退出;
Leader收到Cnew的多数派确认后,表示成员变更成功,后续的日志只要得到Cnew多数派确认即可。Leader给客户端回复成员变更执行成功。
异常分析:
如果Leader的Cold U Cnew尚未推送到Follower,Leader就挂了,此后选出的新Leader并不包含这条日志,此时新Leader依然使用Cold作为自己的成员配置。
如果Leader的Cold U Cnew推送到大部分的Follower后就挂了,此后选出的新Leader可能是Cold也可能是Cnew中的某个Follower。
如果Leader在推送Cnew配置的过程中挂了,那么同样,新选出来的Leader可能是Cold也可能是Cnew中的某一个,此后客户端继续执行一次改变配置的命令即可。
如果大多数的Follower确认了Cnew这个消息后,那么接下来即使Leader挂了,新选出来的Leader肯定位于Cnew中。
两阶段成员变更比较通用且容易理解,但是实现比较复杂,同时两阶段的变更协议也会在一定程度上影响变更过程中的服务可用性,因此我们期望增强成员变更的限制,以简化操作流程。
两阶段成员变更,之所以分为两个阶段,是因为对Cold与Cnew的关系没有做任何假设,为了避免Cold和Cnew各自形成不相交的多数派选出两个Leader,才引入了两阶段方案。
如果增强成员变更的限制,假设Cold与Cnew任意的多数派交集不为空,这两个成员配置就无法各自形成多数派,那么成员变更方案就可能简化为一阶段。
那么如何限制Cold与Cnew,使之任意的多数派交集不为空呢? 方法就是每次成员变更只允许增加或删除一个成员。
可从数学上严格证明,只要每次只允许增加或删除一个成员,Cold与Cnew不可能形成两个不相交的多数派。
一阶段成员变更:
成员变更限制每次只能增加或删除一个成员(如果要变更多个成员,连续变更多次)。
成员变更由Leader发起,Cnew得到多数派确认后,返回客户端成员变更成功。
一次成员变更成功前不允许开始下一次成员变更,因此新任Leader在开始提供服务前要将自己本地保存的最新成员配置重新投票形成多数派确认。
Leader只要开始同步新成员配置,即可开始使用新的成员配置进行日志同步。
Raft与Multi-Paxos对比
Raft与Multi-Paxos都是基于领导者的一致性算法,乍一看有很多地方相同,下面总结一下Raft与Multi-Paxos的异同。
Raft与Multi-Paxos中相似的概念:
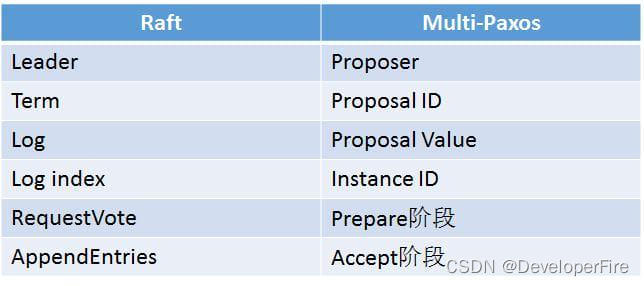
Raft与Multi-Paxos的不同:

整理好的Java面试资料,推荐阅读下载:
最全的java面试题库
Java核心知识点整理
相关文章:
分布式算法 - Raft算法
Paxos是出了名的难懂,而Raft正是为了探索一种更易于理解的一致性算法而产生的。它的首要设计目的就是易于理解,所以在选主的冲突处理等方式上它都选择了非常简单明了的解决方案。推荐阅读提示强烈推荐通过如下资料学习raft。 raft.github.io这里面有一个…...
Python|每日一练|链表|双指针|数组|递归|图算法|单选记录:删除链表的倒数第 N 个结点|下一个排列|迷宫问题
1、删除链表的倒数第 N 个结点(链表,双指针) 给你一个链表,删除链表的倒数第 n 个结点,并且返回链表的头结点。 进阶:你能尝试使用一趟扫描实现吗? 示例 1: 输入:head …...

天线理论知识2——宽带天线介绍
系列文章目录 文章目录 系列文章目录前言一、行波天线1. 长导线天线2. V形天线二、螺旋天线三、八木-宇田天线前言 宽带天线指的是具有哦宽频带特性的天线,常见的宽带天线有行波天线,螺旋天线以及八木天线。 一、行波天线 长度为 l l l的中心馈电的线天线上的电流呈驻波分…...

【计组笔记05】计算机组成与原理之虚拟存储器、指令系统、中央处理器CPU
这篇文章,主要介绍计算机组成与原理之虚拟存储器、指令系统、中央处理器CPU。 目录 一、虚拟存储器 1.1、页式虚拟存储器 1.2、段式虚拟存储器 1...

多功能土壤速测仪功能介绍
大家好,今天给大家介绍一款多功能土壤速测仪,它由多功能速测仪主机、土壤墒情传感器、USB数据线、电源适配器、便携式手提箱等部分组成。速测主机配备有工业级液晶屏,大屏幕中文显示,使得测量参数,时间,设备…...

《设计模式》命令模式
《设计模式》命令模式 命令模式(Command Pattern)是一种行为型设计模式,它将请求和处理分开,使得请求发送者和接收者解耦,从而降低系统的耦合度。在命令模式中,请求被封装为一个独立的对象,并且…...

开源物联网平台有哪些?
目前市面上有许多开源物联网平台可供选择。以下是其中一些较为流行和知名的平台: Eclipse IoT:Eclipse IoT 是一个开源的物联网平台,旨在提供可扩展、灵活和高度集成的工具和框架,用于构建、部署和管理 IoT 解决方案。它包含多个…...
Tesla Autopilot,处理器和硬件
作者 | 初光 出品 | 车端 备注 | 转载请阅读文中版权声明 知圈 | 进“汽车电子与AutoSAR开发”群,请加微“cloud2sunshine” 总目录链接>> AutoSAR入门和实战系列总目录 Tesla MOdelS/X 中有 60 多个处理器。其他型号的处理器较少,但数量仍然不少…...
jianzhiOffer第二版难重点记录
04. 二维数组中的查找https://leetcode.cn/problems/er-wei-shu-zu-zhong-de-cha-zhao-lcof/ 思路:可以每层用以恶搞二分查找,优化思路:从左下角出发直接用二分。 07. 重建二叉树https://leetcode.cn/problems/zhong-jian-er-cha…...

C语言 | 问题20230225
C语言 | 问题20230225 文章目录C语言 | 问题202302251.问题1无限循环2.问题2C 中的运算符优先级实例1:1.问题1 Which slice of the following code is NOT endless loop? 以下代码的哪一部分不是无限循环? A for (;(cgetchar())!\n; ) printf("*c&…...
【机器学习笔记】Python基础笔记
目录基础语法加载数据:pd.read_csv查看数据大小:shape浏览数据行字段:columns浏览少量数据:head()浏览数据概要:describe()基础功能语法缺省值去除缺失值:dropna按行删除:存在空值,即…...

js-DOM03-DOM对CSS的操作
DOM对CSS的操作 - 读取和修改内联样式 - 使用style属性来操作元素的内联样式 - 读取内联样式: 语法:元素.style.样式名 - 例子: 元素.style.width 元素.style.…...

tun驱动之tun_init
tun驱动的初始化方法是tun_init。 static int __init tun_init(void) {int ret 0;pr_info("%s, %s\n", DRV_DESCRIPTION, DRV_VERSION);ret rtnl_link_register(&tun_link_ops);if (ret) {pr_err("Cant register link_ops\n");goto err_linkops;}re…...

模拟退火算法优化bp
%% 基于模拟退火遗传算法优化BP神经网络的钢带厚度预测 clear clc close all format short %% 加载训练数据 Xtrxlsread(train_data.xlsx); DDsize(Xtr,2); input_trainXtr(:,1:DD-1);% output_trainXtr(:,DD);% %% 加载测试数据 Xtexlsread(test_data.xlsx); input_testXte(…...

【NFC音乐相册】简易制作
欢迎来到 Claffic 的博客 💞💞💞 前言: NFC音乐相册在前段时间火了一把,想必大家都听过了,最近我刷到了这个东西,闲来无事就弄了几个,这篇博客就记录下制作工序。 注:我所…...

每日一题——L1-085 试试手气(15)
L1-085 试试手气 我们知道一个骰子有 6 个面,分别刻了 1 到 6 个点。下面给你 6 个骰子的初始状态,即它们朝上一面的点数,让你一把抓起摇出另一套结果。假设你摇骰子的手段特别精妙,每次摇出的结果都满足以下两个条件:…...
FreeRTOS信号量
前面介绍过,队列(queue)可以用于传输数据:在任务之间,任务和中断之间。消息队列用于传输多个数据,但是有时候我们只需要传递一个状态,这个状态值需要用一个数值表示,比如:…...
Leetcode.2385 感染二叉树需要的总时间
题目链接 Leetcode.2385 感染二叉树需要的总时间 Rating : 1711 题目描述 给你一棵二叉树的根节点 root,二叉树中节点的值 互不相同 。另给你一个整数 start。在第 0分钟,感染 将会从值为 start的节点开始爆发。 每分钟,如果节点…...

[蓝桥杯 2022 国 B] 卡牌(贪心/二分)
题目传送门 该题第一思路是想去模拟题目中所描述的过程 这里我选择从大到小遍历可能凑出的牌套数,计算凑出它需要补的牌数以及判断是否会超出能补的牌数 #include<iostream> #include<climits> #include<vector> #include<algorithm> #def…...

1301:大盗阿福
经典的dp打家劫舍问题状态设计dp[i][0]:在前i个店铺中选,且不选第i家的最大和dp[i][1]:在前i个店铺中选,且选第i家的最大和状态转移dp[i][0] max(dp[i-1][1], dp[i-1][0];第i家店不选,那么我们可以选第i-1个店 也可以…...

DISMTools企业部署:在组织中大规模应用的最佳实践
DISMTools企业部署:在组织中大规模应用的最佳实践 【免费下载链接】DISMTools The connected place for Windows system administration 项目地址: https://gitcode.com/GitHub_Trending/di/DISMTools DISMTools是一款专为Windows系统管理设计的连接平台&…...

Hitboxer:开源SOCD清理工具,3分钟提升游戏操作精准度
Hitboxer:开源SOCD清理工具,3分钟提升游戏操作精准度 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 你是否在激烈的游戏对抗中经历过这样的挫败:同时按下左右方向键时角色卡…...

亚马逊卖家公开信息数据提取:反爬攻防战与 Python 批量采集实战
摘要: 批量获取亚马逊(Amazon)第三方卖家的商业名称、信用代码和注册地址等信息,对于跨境 B2B 拓客和供应链分析具有重要意义。然而,亚马逊的 Cloudflare 盾和 Robot 验证码构成了极高的反爬门槛。本文将深度解析亚马逊…...
)
Sora 2原生接入Unity 6.0:5步完成神经渲染管线嵌入,实测帧率提升47%(附GitHub认证插件)
更多请点击: https://kaifayun.com 第一章:Sora 2与Unity整合 Sora 2作为新一代AI视频生成引擎,其开放API设计天然支持与实时3D引擎的深度协同。Unity 2023.2版本通过URP(Universal Render Pipeline)与C# Job System提…...

我靠这个测试设计方法,把漏测率降低了80%
当“直觉测试”撞上南墙很长一段时间里,我和许多测试同行一样,测试用例的设计主要依靠两样东西:需求文档和“测试直觉”。这种模式在业务逻辑相对简单、迭代速度平缓时还能勉强应付。一旦面对复杂的企业级应用、高频的敏捷迭代,或…...

METSO A413248自动化系统
METSO A413248 自动化系统模块产品特点: 品牌归属:芬兰METSO(美卓)工业自动化系统原装备件。 产品类型:工业级自动化控制模块/接口模块。 核心功能:用于控制信号处理、数据采集及系统集成。 系统兼容&am…...

别再手动维护接口文档了!用Spring Boot 3和Swagger 3实现代码与文档的自动同步
Spring Boot 3与Swagger 3:构建零维护成本的API文档工作流 每次接口变更都要手动更新文档?团队成员总是抱怨文档与实际接口不一致?在敏捷开发时代,传统文档维护方式已成为拖累工程效率的典型痛点。本文将揭示如何通过Spring Boot …...

PrivacyGuard实战:基于实证差分隐私的机器学习模型隐私审计框架
1. 项目概述与核心价值在过去的几年里,我亲眼见证了机器学习模型从实验室走向银行、医疗、社交网络等各个敏感领域的全过程。模型性能的每一次飞跃都令人兴奋,但随之而来的隐私泄露事件也一次次为我们敲响警钟。一个在医疗数据上训练出的诊断模型&#x…...

基于Arduino与蓝牙模块的六路无线开关控制系统设计与实现
1. 项目概述:用手机蓝牙控制六路LED想不想把手机变成一个无线遥控器,随手一点就能开关家里的灯带、氛围灯,甚至是其他电器?这个项目就是为你准备的。它基于一块功能增强的Arduino兼容板——GlowDuino Uno,配合一个极其…...

抖音批量下载助手:一键构建你的专属视频素材库
抖音批量下载助手:一键构建你的专属视频素材库 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 还在为手动保存抖音视频而烦恼吗?想要批量获取心仪创作者的精彩内容却无从下手&#x…...