灯带代码实现
#include "FastLED.h" // FastLED库#define NUM_LEDS 60 // LED灯珠数量
#define DATA_PIN 3 // Arduino输出控制信号引脚
#define LED_TYPE WS2812 // LED灯带型号
#define COLOR_ORDER GRB // RGB灯珠中红色、绿色、蓝色LED的排列顺序uint8_t max_bright = 100; // LED亮度控制变量,可使用数值为 0 ~ 255, 数值越大则光带亮度越高CRGB leds[NUM_LEDS]; // 建立光带ledsvoid led_rainbow_loop(void){FastLED.clear();FastLED.show();delay(500);fill_solid(leds, 60, CRGB::Red);FastLED.show();delay(1000); // 等待1秒fill_solid(leds, 60, CRGB::Orange);FastLED.show();delay(1000); // 等待1秒fill_solid(leds, 60, CRGB::Yellow);FastLED.show();delay(1000); // 等待1秒fill_solid(leds, 60, CRGB::Green);FastLED.show();delay(1000); // 等待1秒fill_solid(leds, 60, CRGB::Cyan);FastLED.show();delay(1000); // 等待1秒fill_solid(leds, 60, CRGB::Blue);FastLED.show();delay(1000); // 等待1秒fill_solid(leds, 60, CRGB::Purple);FastLED.show();delay(1000); // 等待1秒
}void led_rainbow_flowing(void)
{FastLED.clear();FastLED.show();delay(500);int i = 0,loop_count = 0;if(NUM_LEDS%7 == 0){loop_count = NUM_LEDS/7;}else{loop_count = NUM_LEDS/7+1;}for(i=0; i<loop_count; i++){leds[i*7] = CRGB::Red;FastLED.show();delay(200);if(i*7+1>=NUM_LEDS) {break;}leds[i*7+1] = CRGB::Orange;FastLED.show();delay(200);if(i*7+2>=NUM_LEDS) {break;}leds[i*7+2] = CRGB::Yellow;FastLED.show();delay(200);if(i*7+3>=NUM_LEDS) {break;}leds[i*7+3] = CRGB::Green;FastLED.show();delay(200);if(i*7+4>=NUM_LEDS) {break;}leds[i*7+4] = CRGB::Cyan;FastLED.show();delay(200);if(i*7+5>=NUM_LEDS) {break;}leds[i*7+5] = CRGB::Blue;FastLED.show();delay(200);if(i*7+6>=NUM_LEDS) {break;}leds[i*7+6] = CRGB::Purple;FastLED.show();delay(200);if(i*7+7>=NUM_LEDS) {break;}}}void led_rainbow_static(void){FastLED.clear();FastLED.show();delay(500);fill_rainbow(leds, 60, 0, 15);FastLED.show();delay(1000);
}void setup() { LEDS.addLeds<LED_TYPE, DATA_PIN, COLOR_ORDER>(leds, NUM_LEDS); // 初始化光带 FastLED.setBrightness(max_bright); // 设置光带亮度
}void loop() { while(1){led_rainbow_flowing();led_rainbow_static();led_rainbow_loop();}
}#include <Adafruit_NeoPixel.h>//灯带库函数
#include<ctime>
#define PIN D1//定义引脚#define NUMPIXELS 29//定义led灯数量Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);//定义灯带(确定灯长,输出口,输出规则)int delayval2 = 40;
void setup(){srand((unsigned)time(NULL)); //设置随机数pixels.setBrightness(25); //设置灯带亮度pixels.begin(); //NeoPixel输出准备数据引脚
}
void loop() {uint32_t light2c = pixels.Color(rand()%255,rand()%255,rand()%255);//设置灯带RGB颜色int light2bright = 10;for(int i=0;i<NUMPIXELS;i++){pixels.setPixelColor(i,light2c);//设置第i盏灯为light2c色)pixels.show();//更新灯带}while(true){light2bright+=10;pixels.setBrightness(light2bright);//设置灯带亮度pixels.show();delay(delayval2);if(light2bright>=200)break;}while(true){light2bright-=10;pixels.setBrightness(light2bright);pixels.show();delay(delayval2);if(light2bright<=10)break;}
}相关文章:

灯带代码实现
#include "FastLED.h" // FastLED库#define NUM_LEDS 60 // LED灯珠数量 #define DATA_PIN 3 // Arduino输出控制信号引脚 #define LED_TYPE WS2812 // LED灯带型号 #define COLOR_ORDER GRB // RGB灯珠中红色、…...
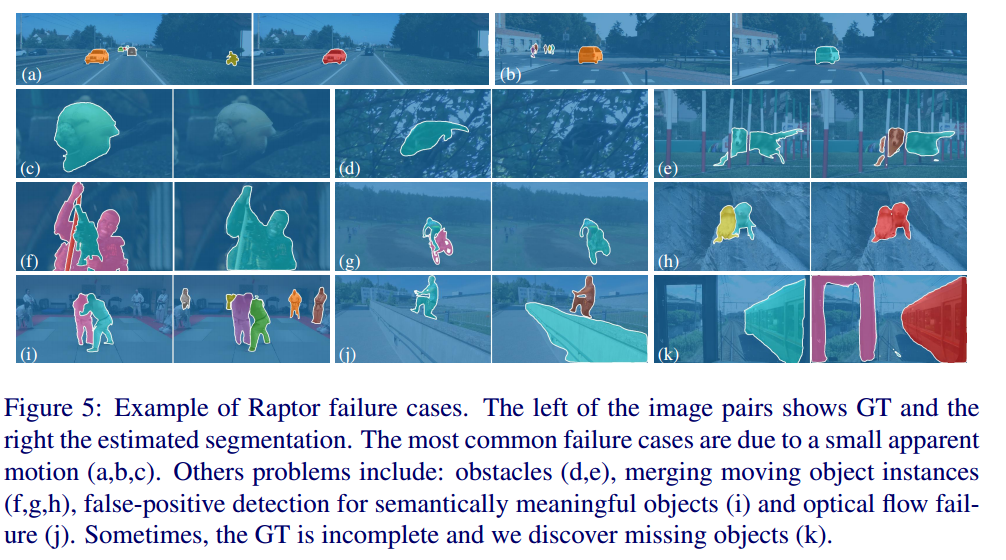
Monocular arbitrary moving object discovery and segmentation 论文阅读
基本信息 题目:Monocular Arbitrary Moving Object Discovery and Segmentation 作者: 来源:BMVC 时间:2021 代码地址:https://github.com/michalneoral/Raptor Abstract 我们提出了一种发现和分割场景中独立移动的…...

ROS | 命名空间
文章目录 概述一、定义介绍二、原理解读1.命名空间2.调用规则概述 本节详细介绍了ROS中的命名空间机制原理和使用。 一、定义介绍 在ROS(Robot Operating System)中,命名空间是一种用于组织和区分节点、话题、服务和参数等资源的层次结构。命名空间使用斜线(/)作为分隔符…...

【中国数据】中国基础矢量数据(shp格式)
数据目录 数据举例 数据获取 专栏分享常用的地理空间数据,包括矢量数据、栅格数据、统计数据等,订阅专栏后,从私信查收专栏完整数据包,持续同步更新。...

Docker:创建主从复制的Redis集群
一、Redis集群 在实际项目里,一般不会简单地只在一台服务器上部署Redis服务器,因为单台Redis服务器不能满足高并发的压力,另外如果该服务器或Redis服务器失效,整个系统就可能崩溃。项目里一般会用主从复制的模式来提升性能&#x…...

c++ 智能指针
1. 起源 c++ 把内存的控制权对开发人员开放,让程序显式的控制内存,这样能够快速的定位到占用的内存,完成释放的工作。但是这样也会引发一些问题,也就是普通指针的隐患: 1.1 野指针 出现野指针的有几个地方 : 指针声明而未初始化,此时指针的将会随机指向内存已经被释放…...

【vue3】依赖注 provide、inject(父组件与儿子、孙子、曾孙子组件之间的传值)
一、基本用法: //父组件 import { ref, provide } from vue const radio ref<string>(red) provide(myColor,radio) //注入依赖//儿子组件、孙子组件、曾孙子组件 import { inject } from vue import type { Ref } from vue; const myColor inject<Ref&l…...

docker 部署tig监控服务
前言 tig对应的服务是influxdb grafana telegraf 此架构比传统的promethus架构更为简洁,虽然influxdb开源方案没有集群部署,但是对于中小型服务监控需求该方案简单高效 本文以docker-compose来演示这套监控体系的快速搭建和效果。 部署 docker-compos…...
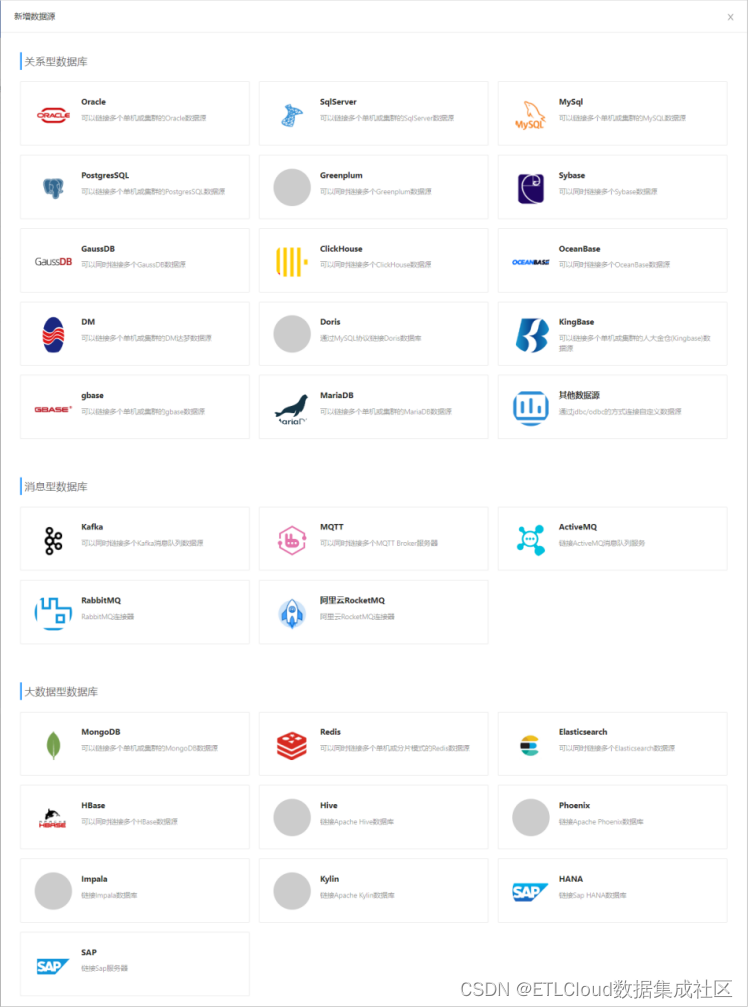
ETL工具与数据处理的关系
ETL工具与数据处理之间存在密切的关系。数据处理是指对原始数据进行清洗、整理、加工和分析等操作,以便生成有用的信息和洞察力。而ETL工具则提供了一种自动化和可视化的方式来执行这些数据处理任务。通过ETL工具,用户可以定义数据抽取、转换和加载的规则…...

Flink几个性能调优
1 配置内存 操作场景 Flink是依赖内存计算,计算过程中内存不够对Flink的执行效率影响很大。可以通过监控GC(Garbage Collection),评估内存使用及剩余情况来判断内存是否变成性能瓶颈,并根据情况优化。 监控节点进程的…...

后端工程进阶| 青训营笔记
这是我参与「第五届青训营 」伴学笔记创作活动的第 2 天 并发编程 协程Goroutine通道Channel锁Lock 并发基础 串行程序与并发程序:串行程序特指只能被顺序执行的指令列表,并发程序则是可以被并发执行的两个及以上的串行程序的综合体。并发程序与并行程序…...
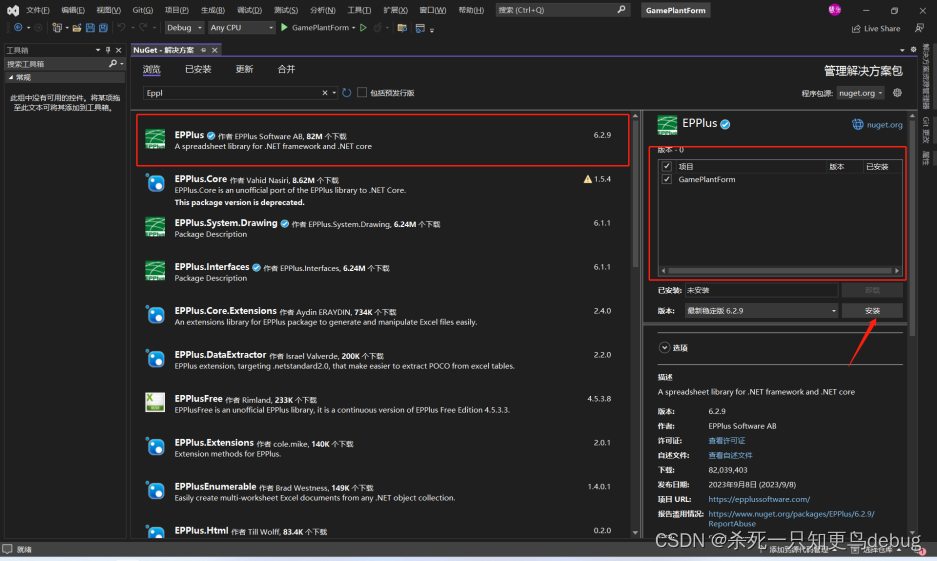
EPPlus库的安装和使用 C# 中 Excel的导入和导出
安装 工具栏->NuGet 包管理器->管理解决方案的NuGet程序包 安装到当前项目中 使用 将 DataGridView 数据导出为Excel 首先,需要将数据DataGridView对象转换为DataTable private void btnExport_Click(object sender, EventArgs e) {// 1.将当前页面的data…...
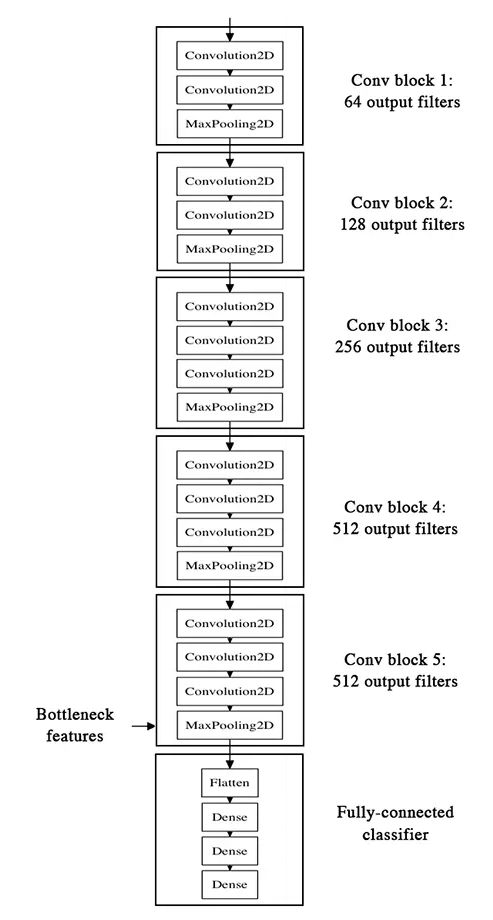
深度学习使用Keras进行迁移学习提升网络性能
上一篇文章我们用自己定义的模型来解决了二分类问题,在20个回合的训练之后得到了大约74%的准确率,一方面是我们的epoch太小的原因,另外一方面也是由于模型太简单,结构简单,故而不能做太复杂的事情,那么怎么提升预测的准确率了?一个有效的方法就是迁移学习。 迁移学习其…...
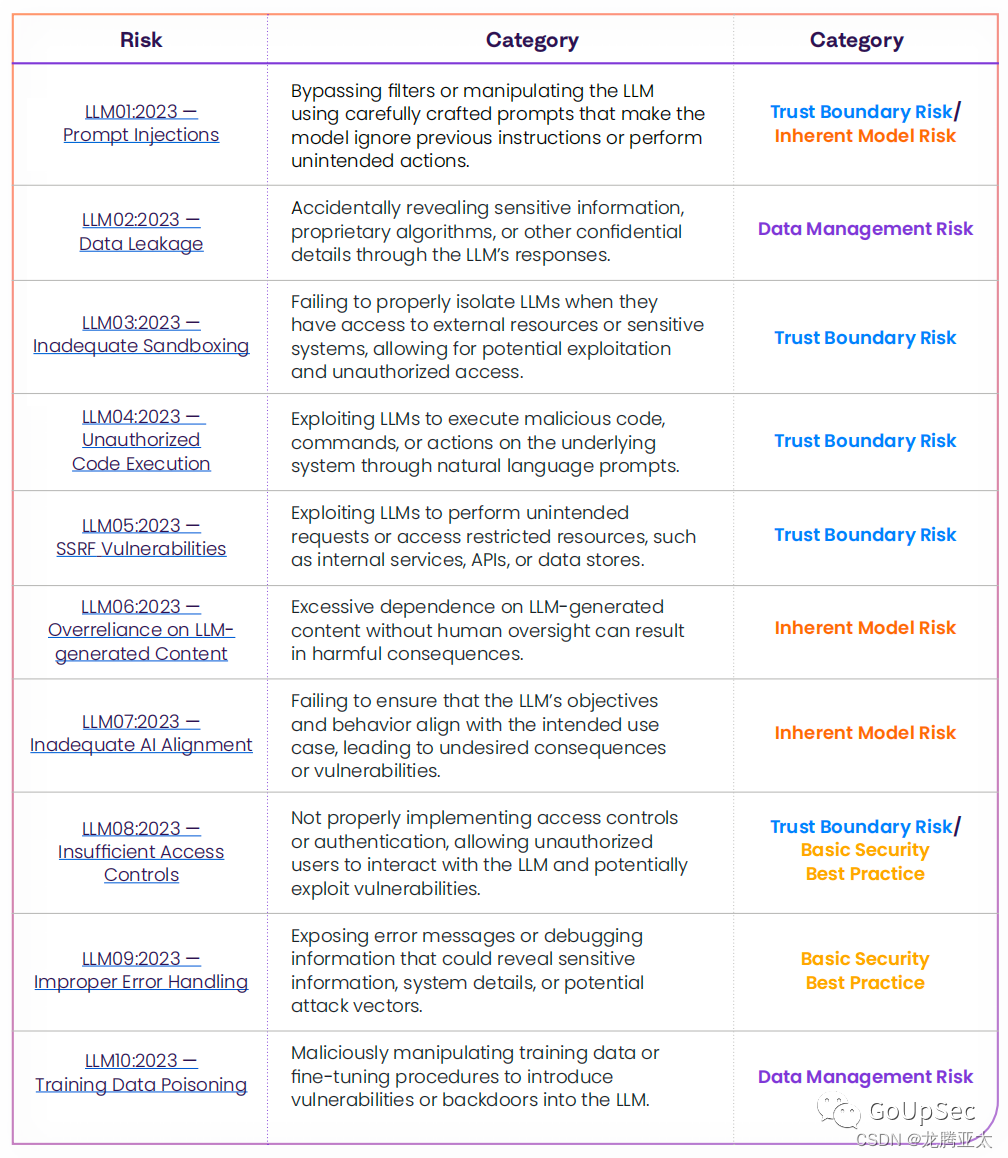
越流行的大语言模型越不安全
源自:GoUpSec “人工智能技术与咨询” 发布 安全研究人员用OpenSSF记分卡对GitHub上50个最流行的生成式AI大语言模型项目的安全性进行了评估,结果发现越流行的大语言模型越危险。 近日,安全研究人员用OpenSSF记分卡对GitHub上50个最流…...

搜维尔科技:伦敦艺术家利用Varjo头显捕捉盲人隐藏的梦想
在伦敦举行的弗里泽艺术博览会上,与专业级虚拟现实/XR硬件和软件领域的全球领先者Varjo合作,展示一个突破性的混合现实艺术装置, 皇家国家盲人学会 (rnib),英国领先的视力丧失慈善机构。 这个名为"公共交通的私人生活"的装置是一个互动的声音和图像雕塑,旨在让有眼光…...

如何将html转化为pdf
html转换为pdf html2pdf.js库, 基于html2canvas和jspdf,只能打印2-3页pdf,比较慢,分页会截断html2canvas 只能打印2-3页pdf,比较慢,分页会截断 // canvasDom-to-image 不支持某些css属性Pdfmake html-to-p…...
ES6初步了解生成器
生成器函数是ES6提供的一种异步编程解决方案,语法行为与传统函数完全不同 语法: function * fun(){ } function * gen(){console.log("hello generator");}let iterator gen()console.log(iterator)打印: 我们发现没有打印”hello…...
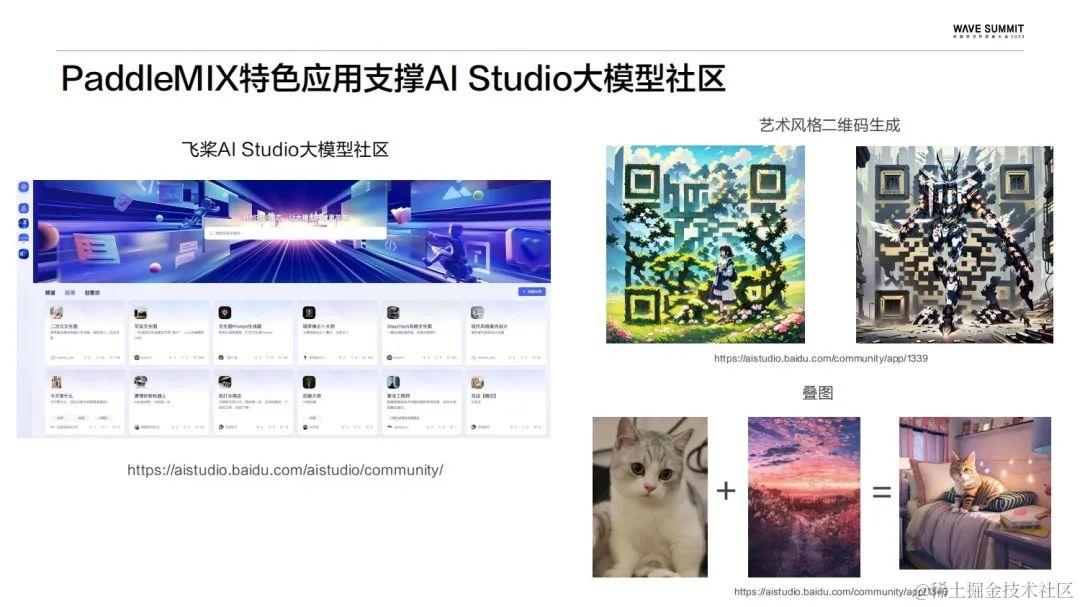
飞桨大模型套件:一站式体验,性能极致,生态兼容
在Wave Summit 2023深度学习开发者大会上,来自百度的资深研发工程师贺思俊和王冠中带来的分享主题是:飞桨大模型套件,一站式体验,性能极致,生态兼容。 大语言模型套件PaddleNLP 众所周知PaddleNLP并不是一个全新的模型…...

【C++入门到精通】哈希 (STL) _ unordered_map _ unordered_set [ C++入门 ]
阅读导航 前言一、unordered系列容器二、unordered_map1. unordered_map简介⭕函数特点 2. unordered_map接口- 构造函数- unordered_map的容量- unordered_map的迭代器- unordered_map的元素访问- unordered_map的修改操作- unordered_map的桶操作 三、unordered_set1. unorde…...
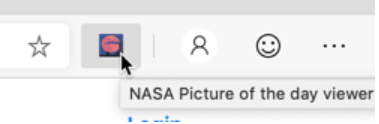
创建 Edge 浏览器扩展教程(上)
创建 Edge 浏览器扩展教程(上) 介绍开始之前后续步骤开始之前1:创建清单 .json 文件2 :添加图标3:打开默认弹出对话框 介绍 在如今日益数字化的时代,浏览器插件在提升用户体验、增加功能以及改善工作流程方…...

AI Agent设计模式:从ReAct到Plan-and-Execute
Agent 设计模式:ReAct 与 Plan-Execute 讲透Function Calling 让 Agent 会用工具,但真正让 Agent「聪明」的,是它的思考模式。这就像给你一本字典不意味着你会写文章——你需要方法论。ReAct 和 Plan-Execute 就是 Agent 的两种核心方法论。一…...

给项目选YOLO模型别再纠结了:从参数量、训练曲线到mAP,手把手教你根据数据集做决策
YOLO模型选型实战指南:从参数解析到场景适配的决策方法论 在目标检测领域,YOLO系列模型凭借其出色的实时性能,已成为工业界和学术界的首选架构之一。然而,面对从YOLOv5到YOLOv9的多个版本迭代,以及每个版本中不同规模的…...

YOLOv8从零部署到实战:一站式环境配置与核心功能解析
1. YOLOv8环境搭建全攻略 第一次接触YOLOv8时,我也被各种依赖项搞得头晕眼花。经过多次实践,我总结出一套最稳妥的安装方案,特别适合刚入门的新手。YOLOv8作为当前最先进的目标检测框架之一,其安装过程确实比传统CV库复杂些&#…...

保姆级教程:用Python+Matplotlib处理微波辐射计LV2数据,绘制专业温度廓线图
科研级气象数据可视化:PythonMatplotlib处理微波辐射计数据的完整实践指南 清晨5点23分,实验室的微波辐射计刚刚完成一次完整的温度廓线扫描。屏幕上跳动的数字背后,隐藏着从地面到平流层的大气热力学密码。对于大气科学研究者而言࿰…...

2025届学术党必备的六大降AI率助手解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 身处人工智能生成内容也就是AIGC越来越普遍的大背景当中,怎样去有效地降低它被检…...

5分钟搞定Android Studio中文界面:免费汉化插件完整指南
5分钟搞定Android Studio中文界面:免费汉化插件完整指南 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 还在为Androi…...

SKNet核心机制解析与PyTorch实战:从Split-Fuse-Select到完整网络构建
1. SKNet核心机制解析:从Split-Fuse-Select到多尺度特征融合 SKNet(Selective Kernel Networks)是CVPR 2019提出的创新性网络结构,它在传统卷积神经网络的基础上引入了动态选择机制。这个机制的核心在于让网络能够自适应地选择不同…...
:从图灵机到 ECU)
从沙子到车辙(1.5):从图灵机到 ECU
1.5 从图灵机到 ECU 一座恶魔般的机房 1945 年,费城,宾夕法尼亚大学摩尔工程学院。 一座 30 吨重的巨兽蹲在一间约 167 平方米的机房里。它的名字叫 ENIAC(Electronic Numerical Integrator and Computer)——世界上第一台通用…...

长期使用 Taotoken 过程中对其服务稳定性的主观感受记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用 Taotoken 过程中对其服务稳定性的主观感受记录 1. 背景与使用模式 过去的一个季度,我负责的一个中型项目进入…...

AI测试-如何选择AI测试工具
在 AI 编程席卷开发圈的 2026 年,面对琳琅满目的工具,测试同学最常问的就是:Augment、Cursor、Trae、Claude Code、Codex 到底该怎么选? 这五款工具虽同为 AI 编程助手,但产品定位、技术路线和适用场景天差地别。本文…...