C# Onnx Yolov8 Detect 印章 指纹捺印 检测
应用场景
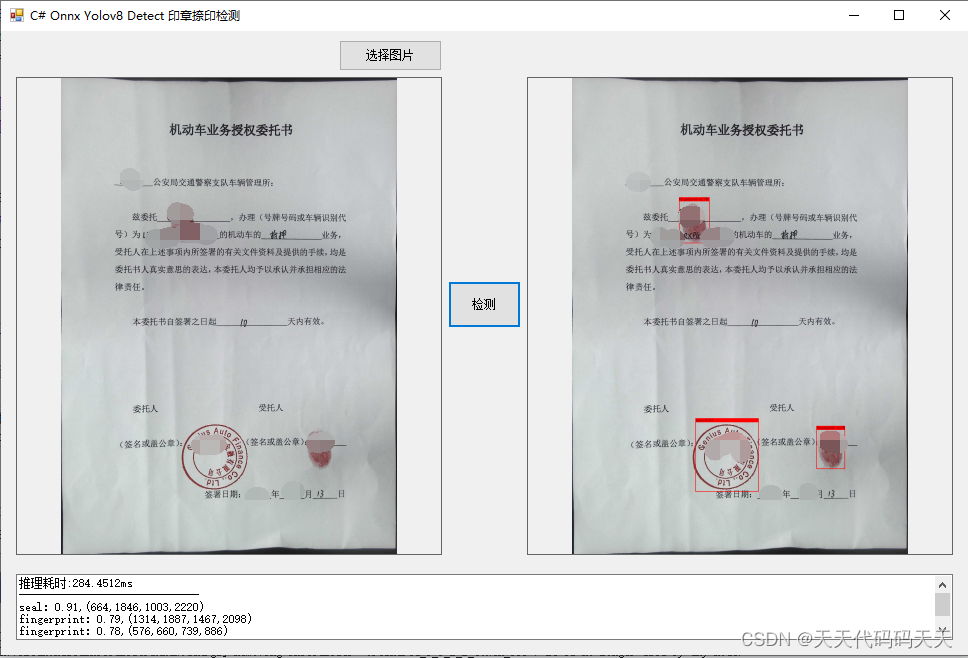
检测文件中的印章和指纹捺印,用于判断文件是否合规(是否盖章,是否按印)
效果
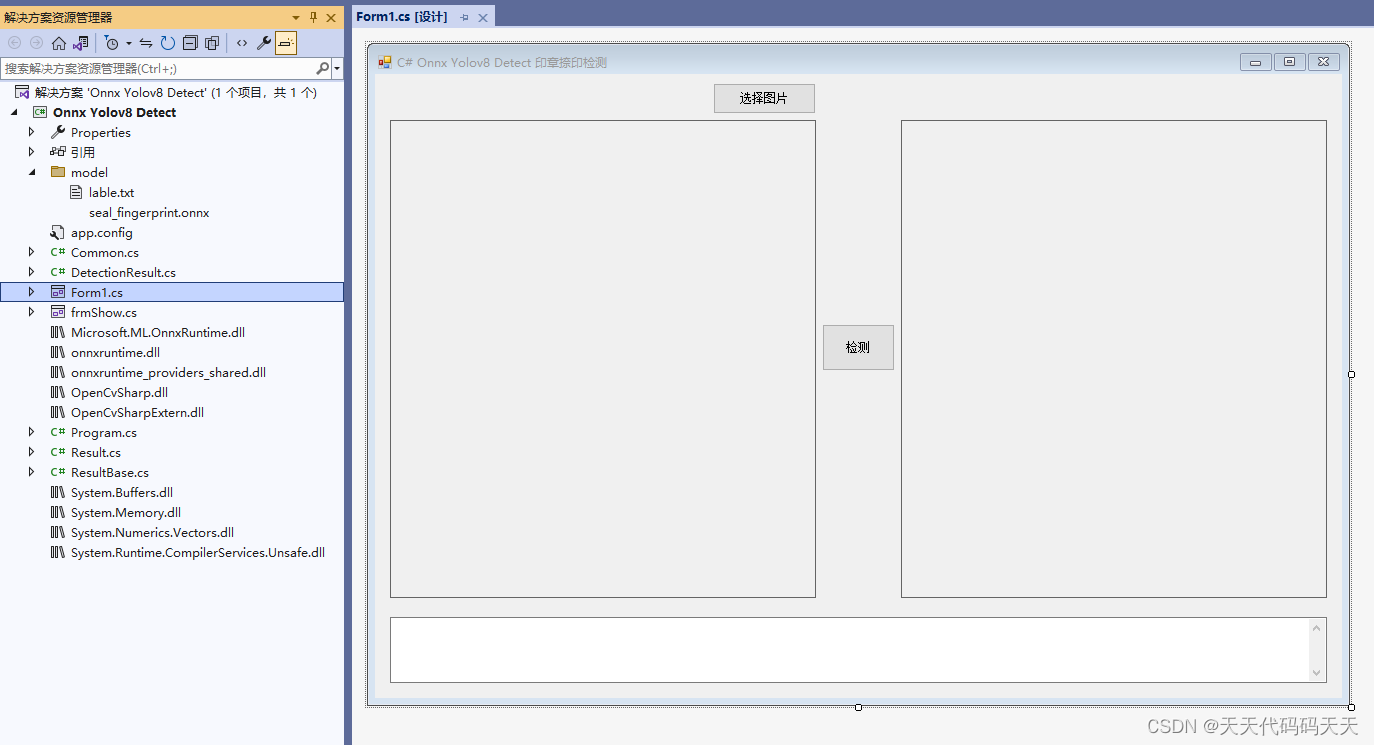
项目
代码
using Microsoft.ML.OnnxRuntime;
using Microsoft.ML.OnnxRuntime.Tensors;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;namespace Onnx_Yolov8_Detect
{public partial class Form1 : Form{public Form1(){InitializeComponent();}string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";string image_path = "";string startupPath;string classer_path;string model_path;DateTime dt1 = DateTime.Now;DateTime dt2 = DateTime.Now;Mat image;Mat result_image;SessionOptions options;InferenceSession onnx_session;Tensor<float> input_tensor;List<NamedOnnxValue> input_ontainer;IDisposableReadOnlyCollection<DisposableNamedOnnxValue> result_infer;DisposableNamedOnnxValue[] results_onnxvalue;Tensor<float> result_tensors;float[] result_array;float[] factors = new float[2];Result result;DetectionResult result_pro;StringBuilder sb = new StringBuilder();private void button1_Click(object sender, EventArgs e){OpenFileDialog ofd = new OpenFileDialog();ofd.Filter = fileFilter;if (ofd.ShowDialog() != DialogResult.OK) return;pictureBox1.Image = null;pictureBox2.Image = null;textBox1.Text = "";image_path = ofd.FileName;pictureBox1.Image = new Bitmap(image_path);image = new Mat(image_path);}private void Form1_Load(object sender, EventArgs e){startupPath = Application.StartupPath + "\\model\\";model_path = startupPath + "seal_fingerprint.onnx";classer_path = startupPath + "lable.txt";// 创建输出会话options = new SessionOptions();options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;options.AppendExecutionProvider_CPU(0);// 设置为CPU上运行// 创建推理模型类,读取本地模型文件onnx_session = new InferenceSession(model_path, options);// 输入Tensorinput_tensor = new DenseTensor<float>(new[] { 1, 3, 640, 640 });// 创建输入容器input_ontainer = new List<NamedOnnxValue>();}private void button2_Click(object sender, EventArgs e){if (image_path == ""){return;}textBox1.Text = "检测中,请稍等……";pictureBox2.Image = null;Application.DoEvents();//图片缩放image = new Mat(image_path);int max_image_length = image.Cols > image.Rows ? image.Cols : image.Rows;Mat max_image = Mat.Zeros(new OpenCvSharp.Size(max_image_length, max_image_length), MatType.CV_8UC3);Rect roi = new Rect(0, 0, image.Cols, image.Rows);image.CopyTo(new Mat(max_image, roi));factors[0] = factors[1] = (float)(max_image_length / 640.0);//将图片转为RGB通道Mat image_rgb = new Mat();Cv2.CvtColor(max_image, image_rgb, ColorConversionCodes.BGR2RGB);Mat resize_image = new Mat();Cv2.Resize(image_rgb, resize_image, new OpenCvSharp.Size(640, 640));//输入Tensorfor (int y = 0; y < resize_image.Height; y++){for (int x = 0; x < resize_image.Width; x++){input_tensor[0, 0, y, x] = resize_image.At<Vec3b>(y, x)[0] / 255f;input_tensor[0, 1, y, x] = resize_image.At<Vec3b>(y, x)[1] / 255f;input_tensor[0, 2, y, x] = resize_image.At<Vec3b>(y, x)[2] / 255f;}}//将 input_tensor 放入一个输入参数的容器,并指定名称input_ontainer.Add(NamedOnnxValue.CreateFromTensor("images", input_tensor));dt1 = DateTime.Now;//运行 Inference 并获取结果result_infer = onnx_session.Run(input_ontainer);dt2 = DateTime.Now;//将输出结果转为DisposableNamedOnnxValue数组results_onnxvalue = result_infer.ToArray();//读取第一个节点输出并转为Tensor数据result_tensors = results_onnxvalue[0].AsTensor<float>();result_array = result_tensors.ToArray();resize_image.Dispose();image_rgb.Dispose();result_pro = new DetectionResult(classer_path, factors,0.7f);result = result_pro.process_result(result_array);result_image = result_pro.draw_result(result, image.Clone());if (!result_image.Empty()){pictureBox2.Image = new Bitmap(result_image.ToMemoryStream());sb.Clear();sb.AppendLine("推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms");sb.AppendLine("------------------------------");for (int i = 0; i < result.length; i++){sb.AppendLine(string.Format("{0}:{1},({2},{3},{4},{5})", result.classes[i], result.scores[i].ToString("0.00"), result.rects[i].TopLeft.X, result.rects[i].TopLeft.Y, result.rects[i].BottomRight.X, result.rects[i].BottomRight.Y));}textBox1.Text = sb.ToString();}else{textBox1.Text = "无信息";}}private void pictureBox2_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox2.Image);}private void pictureBox1_DoubleClick(object sender, EventArgs e){Common.ShowNormalImg(pictureBox1.Image);}}
}
相关文章:
C# Onnx Yolov8 Detect 印章 指纹捺印 检测
应用场景 检测文件中的印章和指纹捺印,用于判断文件是否合规(是否盖章,是否按印) 效果 项目 代码 using Microsoft.ML.OnnxRuntime; using Microsoft.ML.OnnxRuntime.Tensors; using OpenCvSharp; using System; using System.…...
)
0034【Edabit ★☆☆☆☆☆】【修改Bug4】Buggy Code (Part 4)
0034【Edabit ★☆☆☆☆☆】【修改Bug4】Buggy Code (Part 4) bugs conditions strings Instructions Emmy has written a function that returns a greeting to users. However, she’s in love with Mubashir, and would like to greet him slightly differently. She add…...

第十五篇-推荐-Huggingface-镜像-2023-10
推荐一个Huggingface-镜像网站 可下载模型和数据集,解决Huggingface无法访问问题,希望可以一直使用 https://hf-mirror.com/ 举个栗子 https://hf-mirror.com/models?searchqwen 有时需要验证,按要求点就好 域名 hf-mirror.com…...
Macos文件图像比较工具:Kaleidoscope for Mac
Kaleidoscope是一款文件图像比较工具,它可以方便地比较两个文本或者图片文件的差异。这个工具可以在Mac系统上使用,并且支持多种文件格式,包括文本文件、图片文件、PDF文件等等。 Kaleidoscope有一个直观的用户界面,可以让用户轻…...

Docker搭建Plex流媒体服务并播放自己本地视频
Docker搭建Plex流媒体服务 安装Docker创建存储配置文件的目录创建Plex容器配置Plex设置媒体库访问Plex 1 介绍 Plex是一个流媒体服务器,可以轻松地将你的媒体文件库(如电影、电视节目和音乐)通过网络流式传输到各种设备上。 Plex 是一套媒体…...
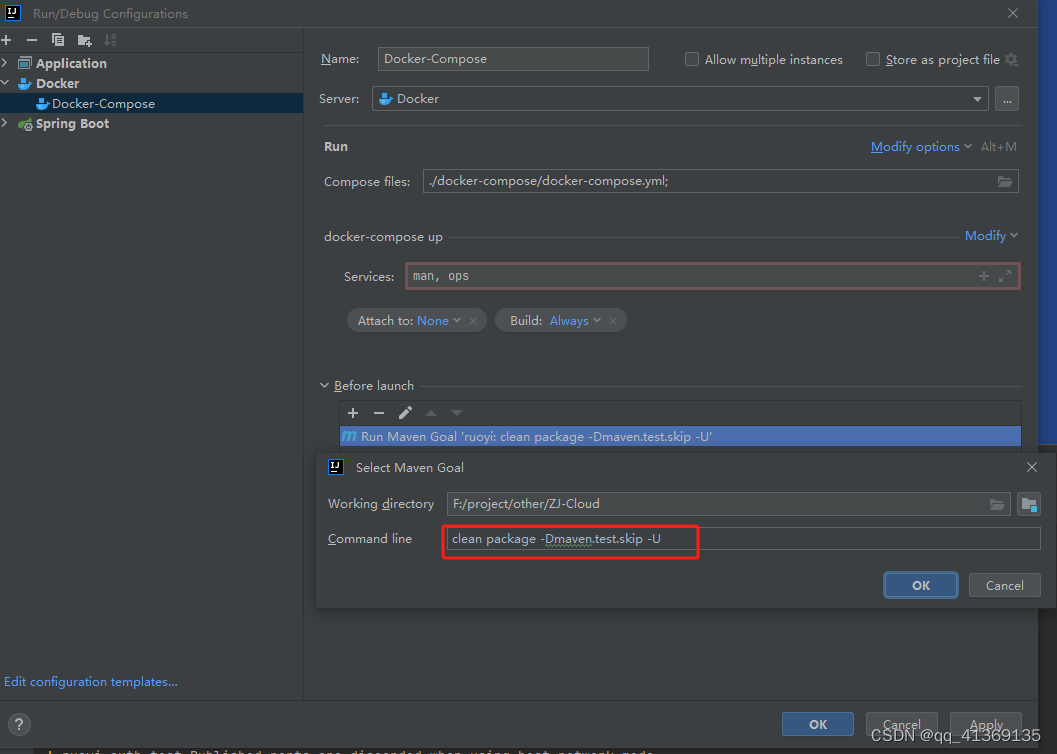
idea + Docker-Compose 实现自动化打包部署(仅限测试环境)
一、修改docker.service文件,添加监听端口 vi /usr/lib/systemd/system/docker.service ExecStart/usr/bin/dockerd -H fd:// --containerd/run/containerd/containerd.sock -H tcp://0.0.0.0:2375 -H unix://var/run/docker.sock重启docker服务 systemctl daemo…...

ubuntu 下载Python
目前为止,Python 3.11 是最新版本的 Python。要在 Ubuntu 中下载和安装 Python 3.11,可以按照以下步骤进行: 安装编译所需的依赖项: sudo apt update sudo apt install -y build-essential zlib1g-dev libffi-dev libssl-dev libl…...

python 使用json包在json格式字符串和python对象之间的变化
起因:使用python json包时,将键值对均为数字的字典存入txt文件后重新加载进字典后出现“字典key值不唯一”的神奇现象。 相关代码: 字典添加数据部分 def xuhao_chuti(self):rand random.randint(1, 908)if rand in self.memery.keys() an…...
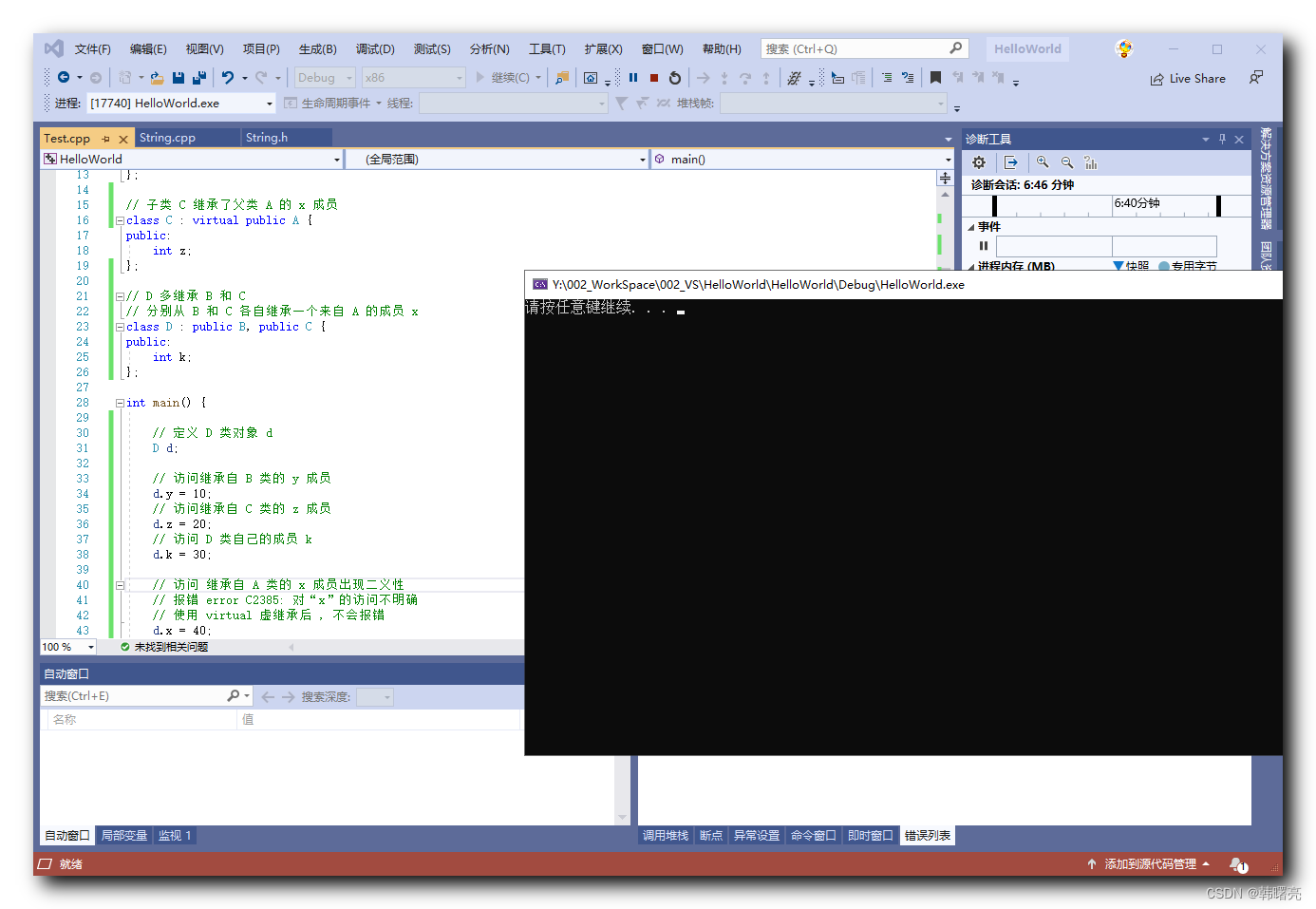
【C++】继承 ⑫ ( 继承的二义性 | virtual 虚继承 )
文章目录 一、继承的二义性1、场景说明 - 继承的二义性2、继承中的二义性报错3、完整代码示例 二、virtual 虚继承1、虚继承引入2、虚继承语法3、代码示例 - 虚继承 一、继承的二义性 1、场景说明 - 继承的二义性 A 类 是 父类 , B 类 和 C 类 继承 A 类 , 是 子类 , D 类 多…...
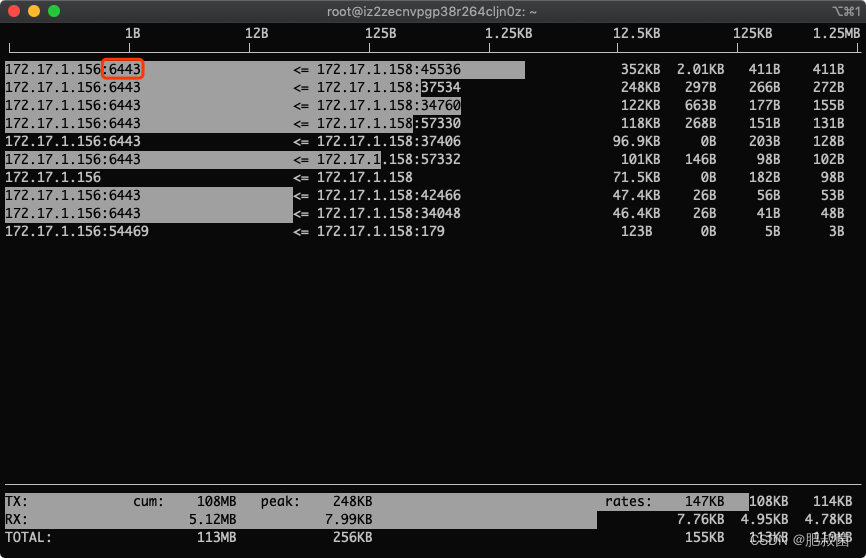
Linux网络流量监控iftop
在 Linux 系统下即时监控服务器的网络带宽使用情况,有很多工具,比如 iptraf、nethogs 等等,但是推荐使用小巧但功能很强大的 iftop 工具【官网:http://www.ex-parrot.com/~pdw/iftop/】。iftop 是 Linux 系统一个免费的网卡实时流…...
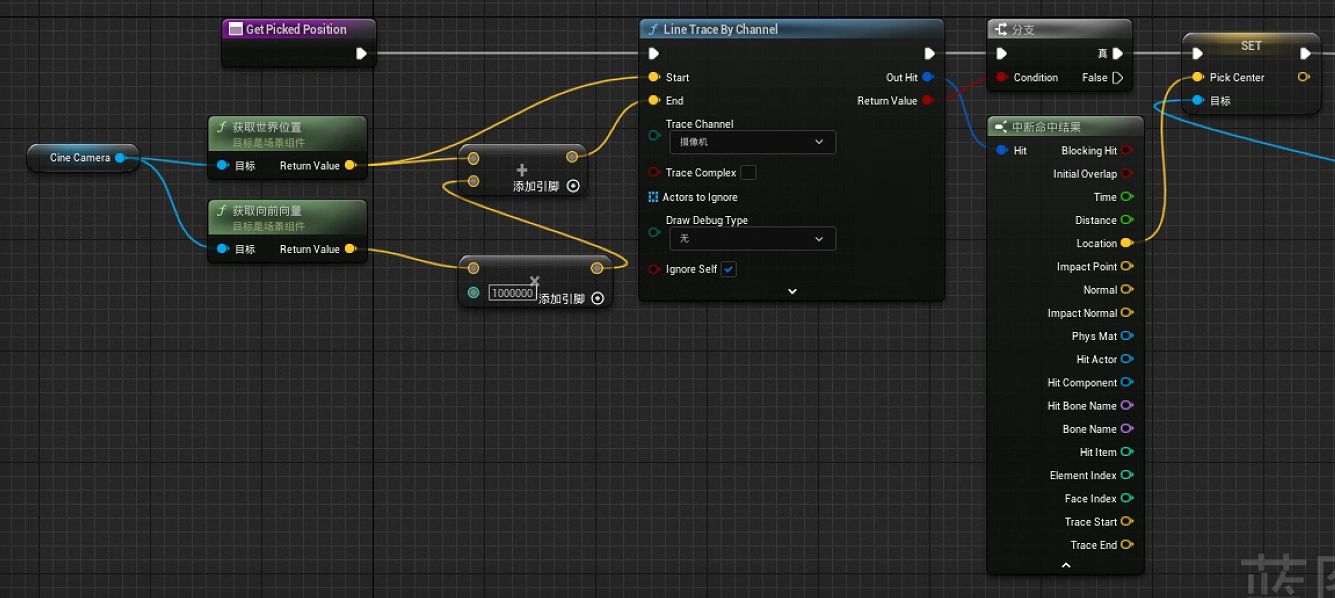
【虚幻引擎UE】UE4/UE5 基于2D屏幕坐标获取场景3D坐标 射线检测(蓝图/C++)
UE4/UE5 基于2D屏幕坐标获取场景3D坐标 一、射线检测1)定义1)射线与3D场景中的物体交互的流程2)射线检测蓝图函数3)蓝图实现根据鼠标点击位置获取场景中的坐标值4)根据相机中心点获取场景中的坐标值5)射线检…...

【OpenHarmony】系统编译环境搭建笔记
0、安装WSL 一定要安装WSL 2否则编译慢到怀疑人生。 1、将WSL从C盘迁移到其他盘 2、安装编译依赖库 按照上述流程,安装会提示一些错误,直接使用如下命令: sudo apt-get update && sudo apt-get install binutils binutils-dev g…...

深入理解JVM虚拟机第十二篇:JVM中的线程说明
文章目录 一:线程说明 1:线程概述 2:后台虚拟机主要线程 (一):虚拟机线程...

synchronized 、ReentrantLock
synchronized 和 ReentrantLock 都是用于实现多线程同步的机制: 锁的获取方式: synchronized 是内置的 Java 关键字,它通过对象的内置监视器来获取锁。每个对象都有一个关联的监视器,只有一个线程可以获得对象的监视器,其他线程必须等待。ReentrantLock 是一个类,它提供了…...
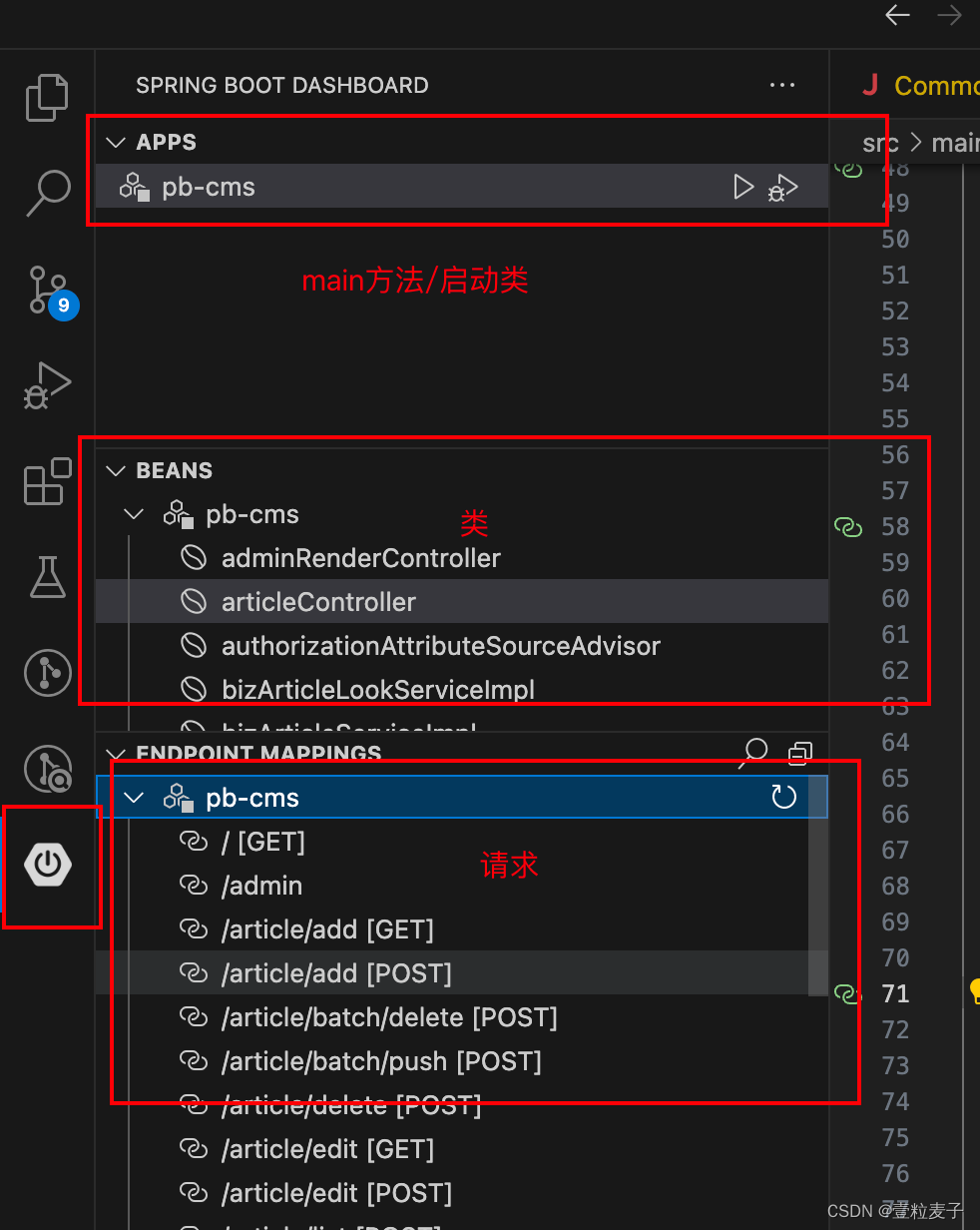
用VSCODE启动Java项目
下载插件 推荐下载插件 启动 在vscode中打开项目或将项目拖进vscode,等进度条加载完成即成启动项目...

最简单的修改linux系统上Docker的镜像源
前言 是不是从docker上下载镜像总是很慢 我有两个物理服务器,两个都在本地不能访问国际网络,那只能使用国内网络,就是下载docker镜像太慢了,慢的我心情都不好了,所以就出了这篇文章用来解决docker下载慢的问题 正文 1.首先你得下载好docker,在Linux上,下载Docker的命令是下面这…...

layui移除(删除)table表格的一行
表格里添加删除按钮: , {field: wealth, width: 150, title: 操作, align: center, fixed: right,templet: function (item) {return <a style"margin:0px 5px; color:red; cursor: pointer;" lay-event"delete" id"DeleteTr" >…...

67 跳跃游戏 II
跳跃游戏 II 题解1 贪心1 正向题解2 贪心2 反向题解3 DP 给定一个长度为 n 的 0 索引整数数组 nums。初始位置为 nums[0]。 每个元素 nums[i] 表示从索引 i 向前跳转的最大长度。换句话说,如果你在 nums[i] 处,你可以跳转到任意 nums[i j] 处: 0 &…...
rust解法)
客户中心模拟(Queue and A, ACM/ICPC World Finals 2000, UVa822)rust解法
你的任务是模拟一个客户中心运作情况。客服请求一共有n(1≤n≤20)种主题,每种主题用5个整数描述:tid, num, t0, t, dt,其中tid为主题的唯一标识符,num为该主题的请求个数,t0为第一个请求的时刻&…...

方案聚焦:高可用的F5分布式云DNS负载均衡
DNS是实现互联网的主要技术之一。它也是网络基础设施的重要组成部分,DNS管理一个分布式和冗余的架构,确保高可用性和高质量的用户响应时间,因此拥有一个可用的、智能的、安全和可扩展的DNS基础设施是至关重要的。然而DNS没有真正的能力来分配…...

基于GA - XGBoost的时间序列预测:抑制过拟合与参数优化
基于遗传算法优化算法优化XGBoost(GA-XGBoost)的时间序列预测 GA-XGBoost时间序列 采用交叉验证抑制过拟合问题 优化参数为迭代次数、最大深度和学习率 matlab代码,注:暂无Matlab版本要求 -- 推荐 2016B 版本及以上 注:采用 XGBoost 工具箱&a…...

企业AI定制开发:以工业场景为核心,赋能全行业数智化转型
在人工智能与实体经济深度融合的趋势下,标准化AI产品难以适配企业差异化业务流程,定制化AI开发成为企业数智化转型的关键路径。山东向量空间人工智能科技有限公司依托JBoltAI企业级Java AI应用开发框架,聚焦工业领域AI改造,同时为…...

IT行业的项目经理考不考PMP证书?我劝你看完这篇在决定!
作为在 IT 圈摸爬滚打 8 年,从后端开发一路转型项目经理、带过 10 大小项目的老学长,最近总被身边技术小伙伴追问:想转 PM,必须考 PMP 吗?没证书就做不好项目管理吗?今天就用过来人的经验,跟大…...

3分钟搞定Windows软件安装难题:winget-install终极解决方案
3分钟搞定Windows软件安装难题:winget-install终极解决方案 【免费下载链接】winget-install Install WinGet using PowerShell! Prerequisites automatically installed. Works on Windows 10/11 and Server 2019/2022. 项目地址: https://gitcode.com/gh_mirror…...

别再让MCSDK电流环PI参数拖后腿了!手把手教你从电机参数到代码配置的完整调参流程
从电机参数到代码实现:MCSDK电流环PI参数优化实战指南 在电机控制领域,电流环的性能直接影响着整个系统的响应速度、稳定性和能效表现。许多工程师在使用STM32的MCSDK进行FOC开发时,往往满足于"电机能转"的基本状态,却忽…...

3步快速上手!终极缠论量化工具:基于TradingView本地SDK的几何交易可视化完整指南
3步快速上手!终极缠论量化工具:基于TradingView本地SDK的几何交易可视化完整指南 【免费下载链接】chanvis 基于TradingView本地SDK的可视化前后端代码,适用于缠论量化研究,和其他的基于几何交易的量化研究。 缠论量化 摩尔缠论 缠…...

PyTorch 2.8镜像效果实测:Wan2.2-I2V图生视频在4090D上的流畅度表现
PyTorch 2.8镜像效果实测:Wan2.2-I2V图生视频在4090D上的流畅度表现 1. 测试环境与配置 1.1 硬件配置 本次测试使用的是基于RTX 4090D显卡的深度学习工作站,具体配置如下: 显卡:NVIDIA RTX 4090D 24GB显存CPU:10核…...

Phi-4-mini-reasoning开发者调试手册:Chainlit后端日志定位、错误堆栈分析
Phi-4-mini-reasoning开发者调试手册:Chainlit后端日志定位、错误堆栈分析 1. 模型简介与部署验证 Phi-4-mini-reasoning 是一个基于合成数据构建的轻量级开源模型,专注于高质量、密集推理的数据,并进一步微调以提高更高级的数学推理能力。…...

pg_textsearch:革新Postgres文本搜索的现代工具
【导语:GitHub上的pg_textsearch是一款适用于Postgres的现代排名文本搜索工具,具备简单语法、可配置参数等特性,目前已达v1.0.0版本可用于生产环境,对Postgres文本搜索领域带来新变革。】pg_textsearch:Postgres文本搜…...

Linux文件搜索工具FSearch:从卡顿到闪电的搜索体验革新
Linux文件搜索工具FSearch:从卡顿到闪电的搜索体验革新 【免费下载链接】fsearch A fast file search utility for Unix-like systems based on GTK3 项目地址: https://gitcode.com/gh_mirrors/fs/fsearch 在Linux系统中,文件搜索往往是一场与时…...