【虚幻引擎UE】UE4/UE5 基于2D屏幕坐标获取场景3D坐标 射线检测(蓝图/C++)
UE4/UE5 基于2D屏幕坐标获取场景3D坐标
- 一、射线检测
- 1)定义
- 1)射线与3D场景中的物体交互的流程
- 2)射线检测蓝图函数
- 3)蓝图实现根据鼠标点击位置获取场景中的坐标值
- 4)根据相机中心点获取场景中的坐标值
- 5)射线检测相关C++函数
- 6)C++实现手动创建射线检测
- 7)C++实现点击获取场景中的坐标值
- 二、非射线检测的情况
- 1)根据相机当前位置获取中心点的世界坐标
一、射线检测
1)定义
射线检测(Ray Casting) 是一种计算机图形和计算机图形学中的基本技术,用于检测光线或射线是否与三维场景中的物体相交,以确定相交点的位置和其他相关信息。射线检测通常用于实现各种交互功能、渲染效果和物理模拟,包括但不限于鼠标拾取、光线追踪、碰撞检测和物体拾取等。
1)射线与3D场景中的物体交互的流程
| 步骤 | 描述 |
|---|---|
| 1 | 定义射线: 定义射线的起点和方向向量。 |
| 2 | 检测相交: 沿着射线的方向,从起点开始沿射线前进,检测射线是否与场景中的任何物体相交。 通常,这涉及到进行碰撞检测,以确定是否有物体与射线相交。 |
| 3 | 确定交点: 如果射线与物体相交,计算交点的位置。 交点通常以3D坐标的形式给出,表示射线与物体相交的点。 |
| 4 | 处理交互: 根据应用的需求,您可以在交互点上执行特定的操作,如选择物体、执行动作或渲染效果。 |
| 5 | 遍历所有可能的相交点: 射线检测通常可以返回多个相交点,因此可以考虑遍历所有可能的交点以处理多重相交。 |
2)射线检测蓝图函数
| 蓝图函数 | 描述 |
|---|---|
LineTraceByChannel | 执行一条射线检测,检测与指定碰撞通道相交的物体。返回一个 Hit Result 结构。 |
SphereTraceByChannel | 以球体的形状执行射线检测,检测球体与物体的碰撞。返回一个 Hit Result 结构。 |
LineTraceMultiByChannel | 执行射线检测,检测与指定碰撞通道相交的所有物体。返回一个 Hit Results 数组。 |
SphereTraceMultiByChannel | 以球体的形状执行射线检测,检测球体与多个物体的碰撞。返回一个 Hit Results 数组。 |
BoxTraceByChannel | 执行射线检测,检测与指定碰撞通道相交的物体,使用盒子形状。返回一个 Hit Result 结构。 |
MultiSphereTraceByChannel | 执行多个球体形状的射线检测,检测多个球体与物体的碰撞。返回一个 Hit Results 数组。 |
LineTraceForObjects | 执行射线检测,检测与指定物体类型相交的物体。返回一个 Hit Result 结构。 |
SphereTraceForObjects | 以球体的形状执行射线检测,检测与指定物体类型相交的物体。返回一个 Hit Result 结构。 |
BoxTraceForObjects | 执行射线检测,检测与指定物体类型相交的物体,使用盒子形状。返回一个 Hit Result 结构。 |
MultiSphereTraceForObjects | 执行多个球体形状的射线检测,检测与指定物体类型相交的物体。返回一个 Hit Results 数组。 |
CapsuleTraceByChannel | 以胶囊体的形状执行射线检测,检测胶囊体与物体的碰撞。返回一个 Hit Result 结构。 |
CapsuleTraceForObjects | 以胶囊体的形状执行射线检测,检测与指定物体类型相交的物体。返回一个 Hit Result 结构。 |
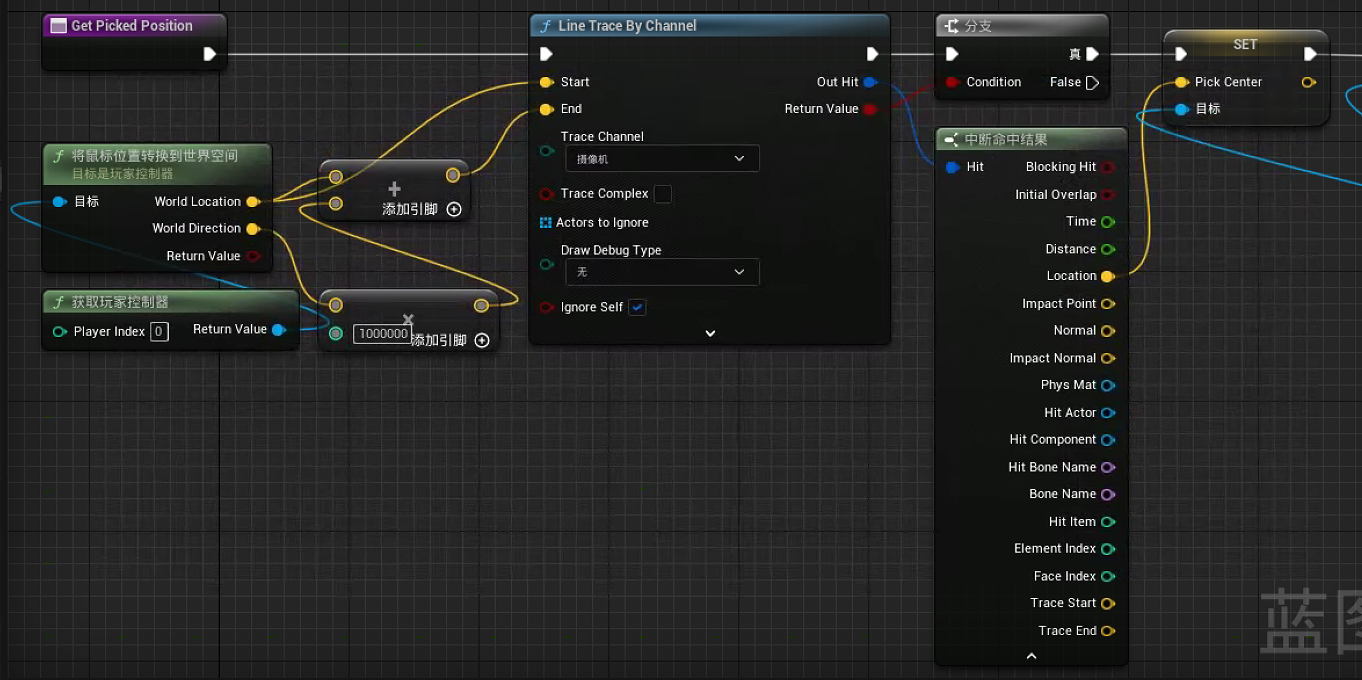
3)蓝图实现根据鼠标点击位置获取场景中的坐标值
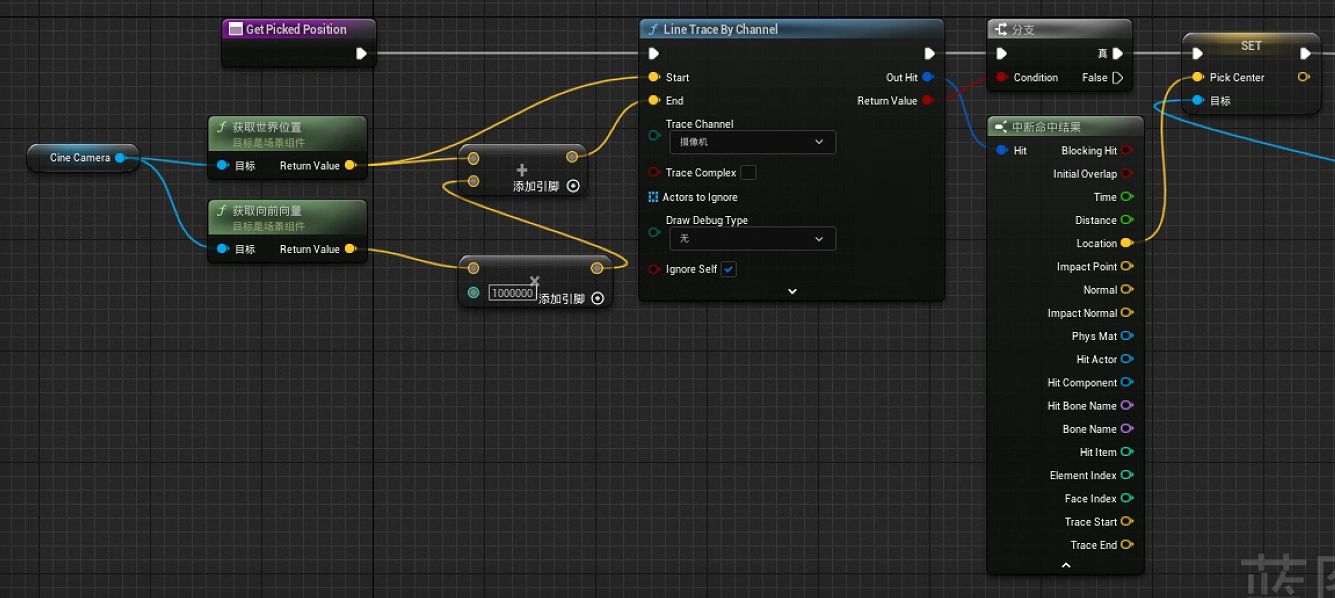
4)根据相机中心点获取场景中的坐标值
需要获取到pawn里的相机。
5)射线检测相关C++函数
(仅列举linetrace系列其他大同小异)
LineTraceSingleByChannel:- 用于检测一条射线与第一个相交物体的碰撞。
- 返回一个
FHitResult结构,其中包含有关碰撞的信息,如碰撞点、碰撞法线和碰撞物体的引用。
bool UWorld::LineTraceSingleByChannel(FHitResult& OutHit, const FVector Start, const FVector End, ECollisionChannel TraceChannel, const FCollisionQueryParams& Params)
LineTraceMultiByChannel:- 用于检测一条射线与多个相交物体的碰撞。
- 返回一个
TArray<FHitResult>,其中包含所有相交物体的碰撞信息。
int32 UWorld::LineTraceMultiByChannel(TArray<FHitResult>& OutHits, const FVector Start, const FVector End, ECollisionChannel TraceChannel, const FCollisionQueryParams& Params)
LineTraceSingleByObjectType:- 类似于
LineTraceSingleByChannel,但是使用物体类型(EObjectTypeQuery)而不是碰撞通道进行检测。
- 类似于
bool UWorld::LineTraceSingleByObjectType(FHitResult& OutHit, const FVector Start, const FVector End, FObjectQueryParams ObjectQueryParams, const FCollisionQueryParams& Params)
LineTraceMultiByObjectType:- 类似于
LineTraceMultiByChannel,但是使用物体类型(EObjectTypeQuery)而不是碰撞通道进行检测。
- 类似于
int32 UWorld::LineTraceMultiByObjectType(TArray<FHitResult>& OutHits, const FVector Start, const FVector End, FObjectQueryParams ObjectQueryParams, const FCollisionQueryParams& Params)
6)C++实现手动创建射线检测
FVector StartLocation; // 射线的起点坐标
FVector ForwardVector; // 射线的方向向量
FHitResult HitResult; // 用于存储碰撞信息的变量// 设置射线的起点坐标
StartLocation = PlayerCameraComponent->GetComponentLocation(); // PlayerCameraComponent是摄像机组件// 设置射线的方向向量
ForwardVector = PlayerCameraComponent->GetForwardVector(); // 获取摄像机的前向向量// 建立射线
FVector EndLocation = ((ForwardVector * RayLength) + StartLocation); // 计算射线的终点坐标// 进行射线检测
if (GetWorld()->LineTraceSingleByChannel(HitResult, StartLocation, EndLocation, ECC_Visibility))
{// 射线与物体相交,可以在HitResult中获取碰撞信息AActor* HitActor = HitResult.GetActor();FVector ImpactPoint = HitResult.ImpactPoint;// 进一步处理交互逻辑
}
PlayerCameraComponent:摄像机组件
LineTraceSingleByChannel:射线检测函数
HitResult:碰撞的物体和碰撞点
RayLength:射线的长度;
ECC_Visibility:射线检测所使用的碰撞通道
7)C++实现点击获取场景中的坐标值
void AYourPlayerController::GetSceneLocationFromMouse()
{// 获取玩家控制器APlayerController* PlayerController = this;if (PlayerController){// 获取鼠标点击位置FVector MouseLocation, MouseDirection;PlayerController->DeprojectMousePositionToWorld(MouseLocation, MouseDirection);// 创建射线,用于射线检测FHitResult HitResult;FCollisionQueryParams CollisionParams;// 执行射线检测if (GetWorld()->LineTraceSingleByChannel(HitResult, MouseLocation, MouseLocation + MouseDirection * YourRayLength, ECC_Visibility, CollisionParams)){// 获取射线与场景相交的位置FVector SceneLocation = HitResult.Location;// 打印结果UE_LOG(LogTemp, Warning, TEXT("Scene Location: %s"), *SceneLocation.ToString());}}
}
二、非射线检测的情况
1)根据相机当前位置获取中心点的世界坐标
void AYourPlayerController::GetCameraCenterLocation()
{// 获取玩家控制器的视图控制器APlayerController* PlayerController = this;if (PlayerController){// 获取相机组件UCameraComponent* CameraComponent = PlayerController->PlayerCameraManager->GetCameraComponent();if (CameraComponent){// 获取相机位置FVector CameraLocation = CameraComponent->GetComponentLocation();// 获取相机旋转FRotator CameraRotation = CameraComponent->GetComponentRotation();// 计算相机中心点的位置(通常位于相机位置的前方,视角方向)FVector CameraForwardVector = CameraRotation.Vector();FVector CameraCenterLocation = CameraLocation + CameraForwardVector * YourDistance; // 替换 YourDistance 为相机中心点到相机位置的距离// 将相机中心点的位置转换为场景中的坐标FVector WorldLocation = CameraCenterLocation;// 打印结果UE_LOG(LogTemp, Warning, TEXT("Camera Center Location: %s"), *WorldLocation.ToString());}}
}
相关文章:
【虚幻引擎UE】UE4/UE5 基于2D屏幕坐标获取场景3D坐标 射线检测(蓝图/C++)
UE4/UE5 基于2D屏幕坐标获取场景3D坐标 一、射线检测1)定义1)射线与3D场景中的物体交互的流程2)射线检测蓝图函数3)蓝图实现根据鼠标点击位置获取场景中的坐标值4)根据相机中心点获取场景中的坐标值5)射线检…...

【OpenHarmony】系统编译环境搭建笔记
0、安装WSL 一定要安装WSL 2否则编译慢到怀疑人生。 1、将WSL从C盘迁移到其他盘 2、安装编译依赖库 按照上述流程,安装会提示一些错误,直接使用如下命令: sudo apt-get update && sudo apt-get install binutils binutils-dev g…...

深入理解JVM虚拟机第十二篇:JVM中的线程说明
文章目录 一:线程说明 1:线程概述 2:后台虚拟机主要线程 (一):虚拟机线程...

synchronized 、ReentrantLock
synchronized 和 ReentrantLock 都是用于实现多线程同步的机制: 锁的获取方式: synchronized 是内置的 Java 关键字,它通过对象的内置监视器来获取锁。每个对象都有一个关联的监视器,只有一个线程可以获得对象的监视器,其他线程必须等待。ReentrantLock 是一个类,它提供了…...
用VSCODE启动Java项目
下载插件 推荐下载插件 启动 在vscode中打开项目或将项目拖进vscode,等进度条加载完成即成启动项目...

最简单的修改linux系统上Docker的镜像源
前言 是不是从docker上下载镜像总是很慢 我有两个物理服务器,两个都在本地不能访问国际网络,那只能使用国内网络,就是下载docker镜像太慢了,慢的我心情都不好了,所以就出了这篇文章用来解决docker下载慢的问题 正文 1.首先你得下载好docker,在Linux上,下载Docker的命令是下面这…...

layui移除(删除)table表格的一行
表格里添加删除按钮: , {field: wealth, width: 150, title: 操作, align: center, fixed: right,templet: function (item) {return <a style"margin:0px 5px; color:red; cursor: pointer;" lay-event"delete" id"DeleteTr" >…...

67 跳跃游戏 II
跳跃游戏 II 题解1 贪心1 正向题解2 贪心2 反向题解3 DP 给定一个长度为 n 的 0 索引整数数组 nums。初始位置为 nums[0]。 每个元素 nums[i] 表示从索引 i 向前跳转的最大长度。换句话说,如果你在 nums[i] 处,你可以跳转到任意 nums[i j] 处: 0 &…...
rust解法)
客户中心模拟(Queue and A, ACM/ICPC World Finals 2000, UVa822)rust解法
你的任务是模拟一个客户中心运作情况。客服请求一共有n(1≤n≤20)种主题,每种主题用5个整数描述:tid, num, t0, t, dt,其中tid为主题的唯一标识符,num为该主题的请求个数,t0为第一个请求的时刻&…...

方案聚焦:高可用的F5分布式云DNS负载均衡
DNS是实现互联网的主要技术之一。它也是网络基础设施的重要组成部分,DNS管理一个分布式和冗余的架构,确保高可用性和高质量的用户响应时间,因此拥有一个可用的、智能的、安全和可扩展的DNS基础设施是至关重要的。然而DNS没有真正的能力来分配…...

大数据性能测试方案-V1.0
XXX大数据平台 性能测试方案 [V1-1.0] 拟 制 人: 审 核 人: 批 准 人: [xxxx年xx月xx日]...

Kafak - 单机/集群快速安装指北(3.x版本)
文章目录 官方下载地址上传安装包解压安装包到指定目录修改解压包名为kafka修改config目录下的配置文件server.propertie配置环境变量其他机器同上 - 修改配置文件中的brokerid启动集群停止Kraft 方式部署集群----(不使用zookeeper) 官方下载地址 http://kafka.apache.org/dow…...

互联网Java工程师面试题·Spring篇·第五弹
目录 1、什么是 spring? 2、使用 Spring 框架的好处是什么? 3、Spring 由哪些模块组成? 4、核心容器(应用上下文) 模块。 5、BeanFactory – BeanFactory 实现举例。 6、XMLBeanFactory 7、解释 AOP 模块 8、解释 JDBC 抽象和 DAO 模块。 9、…...

XTU-OJ 1221-Binary
题目描述 给你一个非负整数n(0≤n≤232-1),求其二进制里面最长连续1数码的长度。 比如,7的二进制为111,所以最长连续1数码的长度为3;13的二进制为1101,所以最长连续1数码的长度为2. 输入 第一行是一个整数K(K≤20000),表示样例的个…...
)
Chromium源码由浅入深(三)
接前一篇文章:Chromium源码由浅入深(二) 上一回说到了关键的“钥匙”:browserBridge.gpuInfo,本文就针对其进行深入探究。 先来看前半部分,browserBridge。 在content/browser/resources/gpu/gpu_interna…...
如何集成验证码短信API到你的应用程序
引言 当你需要为你的应用程序增加安全性和用户验证功能时,集成验证码短信API是一个明智的选择。验证码短信API可以帮助你轻松实现用户验证、密码重置和账户恢复等功能,提高用户体验并增强应用程序的安全性。本文将介绍如何将验证码短信API集成到你的应用…...
)
Linux- 由映射文件I/O问题引出的SIGBUS 空洞文件(Sparse File)
SIGBUS SIGBUS是一个在Unix-like操作系统中的信号,它通常表示非法访问内存,而这种非法访问的原因与常见的SIGSEGV(段错误)有所不同。以下是可能导致SIGBUS的常见情况: 未对齐的内存访问:某些硬件平台要求数…...

代码随想录图论 第二天 | 695. 岛屿的最大面积 1020. 飞地的数量
代码随想录图论 第二天 | 695. 岛屿的最大面积 1020. 飞地的数量 一、695. 岛屿的最大面积 题目链接:https://leetcode.cn/problems/max-area-of-island/ 思路:典型的遍历模板题,我采用深度优先,每块岛屿递归遍历的时候计数&…...

R语言代码示例
以下是一个使用R语言和httrOAuth库的下载器程序,用于下载的内容。程序使用以下代码。 # 安装和加载必要的库 install.packages("httr") install.packages("httrOAuth") library(httr) library(httrOAuth) # 设置 http_proxy <- "du…...

ESP32网络开发实例-将 ESP32 连接到 EMQX Cloud MQTT Broker
将 ESP32 连接到 EMQX Cloud MQTT Broker 文章目录 将 ESP32 连接到 EMQX Cloud MQTT Broker1、MQTT介绍2、软件准备3、硬件准备4、代码实现5、MQTT测试在本文中,将介绍使用 EMQX Cloud MQTT 服务器。 首先,我们将介绍如何将 ESP32 开发板连接到 EMQX Cloud MQTT 服务器。 我…...

Phi-4-reasoning-vision-15B部署教程:开源大模型镜像适配国产GPU方案
Phi-4-reasoning-vision-15B部署教程:开源大模型镜像适配国产GPU方案 1. 模型介绍 Phi-4-reasoning-vision-15B是微软推出的视觉多模态推理模型,具备强大的图像理解和分析能力。这个15B参数规模的模型特别擅长处理需要结合视觉和语言理解的复杂任务。 …...

[Windows 驱动] 深入解析进程名获取的多种内核方法
1. Windows驱动开发中的进程名获取基础 在Windows内核驱动开发中,获取进程名是最基础但至关重要的操作之一。想象一下,你正在开发一个安全监控驱动,需要实时检查哪些进程正在运行;或者你在开发一个性能优化工具,需要针…...

Qwen3.5-9B-AWQ-4bit部署教程:Docker容器内路径映射与模型加载权限配置
Qwen3.5-9B-AWQ-4bit部署教程:Docker容器内路径映射与模型加载权限配置 1. 引言 今天我们要探讨的是如何在Docker环境中部署Qwen3.5-9B-AWQ-4bit模型,这是一个支持图像理解的多模态模型。这个模型能够结合上传的图片与文字提示词,输出中文分…...

mkcert 命令文档 - 本地 HTTPS 开发证书生成工具详解
1. 命令简介mkcert 是一个用 Go 语言编写的、零配置的本地开发用自签名证书生成工具。它能够自动创建并安装本地证书颁发机构(CA)到系统的信任存储中,并生成受本地信任的开发证书,大幅简化 HTTPS 本地开发环境的搭建过程ÿ…...
告别双流!用Vision Transformer (ViT) 搭建单流目标跟踪器OSTrack,实测速度提升40%
单流目标跟踪新范式:ViT驱动的OSTrack实战解析 在计算机视觉领域,目标跟踪技术正经历着从传统双流架构向单流范式的革命性转变。当我们面对复杂场景中的实时跟踪需求时,传统方法的性能瓶颈日益凸显——特征提取与关系建模的割裂处理导致计算冗…...

爱毕业aibiye等8款智能应用显著改善了论文撰写体验,编程与学术研究流程更加顺畅
文章总结表格(工具排名对比) 工具名称 核心优势 aibiye 精准降AIGC率检测,适配知网/维普等平台 aicheck 专注文本AI痕迹识别,优化人类表达风格 askpaper 快速降AI痕迹,保留学术规范 秒篇 高效处理混AIGC内容&…...

深度探索:开源工具OpenCore Legacy Patcher技术揭秘与完整指南
深度探索:开源工具OpenCore Legacy Patcher技术揭秘与完整指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 随着苹果系统持续演进,…...

【计算机网络工程论文】基于三层交换的局域网设计:连平中学教学楼VLAN划分与eNSP仿真应用
摘 要 随着连平中学发展和信息化平台的建设,面对庞大的信息数据和高要求的管理效率,网络的规划、管理、安全逐渐成为关键。对教学楼而言,规划一个高效、稳定、可扩展的局域网至关重要。 本文针对连平中学教学单位,鉴于其所有部门…...

掌握MEAN.JS模块化开发:5个核心模块实战指南与最佳实践
掌握MEAN.JS模块化开发:5个核心模块实战指南与最佳实践 【免费下载链接】mean MEAN.JS - Full-Stack JavaScript Using MongoDB, Express, AngularJS, and Node.js - 项目地址: https://gitcode.com/gh_mirrors/mea/mean MEAN.JS作为基于MongoDB、Express、…...

在供应链与资本获取驱动下,近半数全球高管计划于未来12个月内拓展美国业务布局
• 45%的企业高层管理人员计划在未来12个月内设立美国法律实体;另有27%表示将在未来两至三年内考虑进入美国市场 • 65%的受访者将供应链或制造效率视为推动赴美扩张的首要驱动因素 • 88%的企业将联邦及州层面的税务申报认定为美国合规中最具挑战性的领域 CSC最新研…...