二叉搜索树之AVL树
AVL树的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺
序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年 发明了一种
解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过
1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
它的左右子树都是AVL树
左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
平衡因子bf = 右子树高度 - 左子树高度
如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在O(log_2 n),搜索时间
复杂度O(log_2 n)。
AVL树的插入
AVL树节点在定义时维护一个平衡因子,具体节点定义如下:
static class TreeNode{public int val;public int bf;//平衡因子public TreeNode left;public TreeNode right;public TreeNode parent;public TreeNode(int val){this.val = val;}}AVL树的插入过程可以分为两步:
1. 按照二叉搜索树的方式插入新节点
2. 调整节点的平衡因子
按照二叉搜索树的方式插入新节点:
public boolean insert(int val){TreeNode node = new TreeNode(val);if (root == null){root = node;return true;}TreeNode parent = null;TreeNode cur = root;while (cur != null){if (cur.val < val){parent = cur;cur = cur.right;}else if (cur.val == val){return false;}else {parent = cur;cur = cur.left;}}if (parent.val < val){parent.right = node;}else {parent.left = node;}node.parent = parent;cur = node;}调整节点的平衡因子
//平衡因子的修改while (parent != null){//先看cur是parent的左还是右 决定平衡因子是++还是--if (cur == parent.right){//如果是右树,那么右树高度增加 平衡因子++parent.bf++;}else {//如果是左树,那么左树高度增加 平衡因子--parent.bf--;}//检查当前的平衡因子 是不是绝对值 1 0 -1if (parent.bf == 0){//说明已经平衡了break;}else if (parent.bf == 1 || parent.bf == -1){//继续向上去修改平衡因子cur = parent;parent = cur.parent;}else {if (parent.bf == 2){//右树高-》需要降低右树的高度if (cur.bf == 1){//左单旋rotateLeft(parent);}else {//cur.bf == -1rotateRL(parent);}}else {//parent.bf == -2 左树高-》需要降低左树的高度if (cur.bf == -1){//右单旋rotateRight(parent);}else {//cur.bf == 1//左右双旋rotateLR(parent);}}//上述代码走完就已经平衡了break;}}左单旋-插入位置在较高右子树的右侧:(parent.bf = 2, cur.bf = 1)

//左单旋private void rotateLeft(TreeNode parent) {TreeNode subR = parent.right;TreeNode subRL= subR.left;parent.right = subRL;subR.left = parent;if (subRL != null){subRL.parent = parent;}TreeNode pParent = parent.parent;parent.parent = subR;if (parent == root){root = subR;root.parent = null;}else {if (pParent.left == parent){pParent.left = subR;}else {pParent.right = subR;}subR.parent = pParent;}subR.bf = 0;parent.bf = 0;}右单旋-插入位置在较高左子树的左侧:(parent.bf = -2, cur.bf = -1)
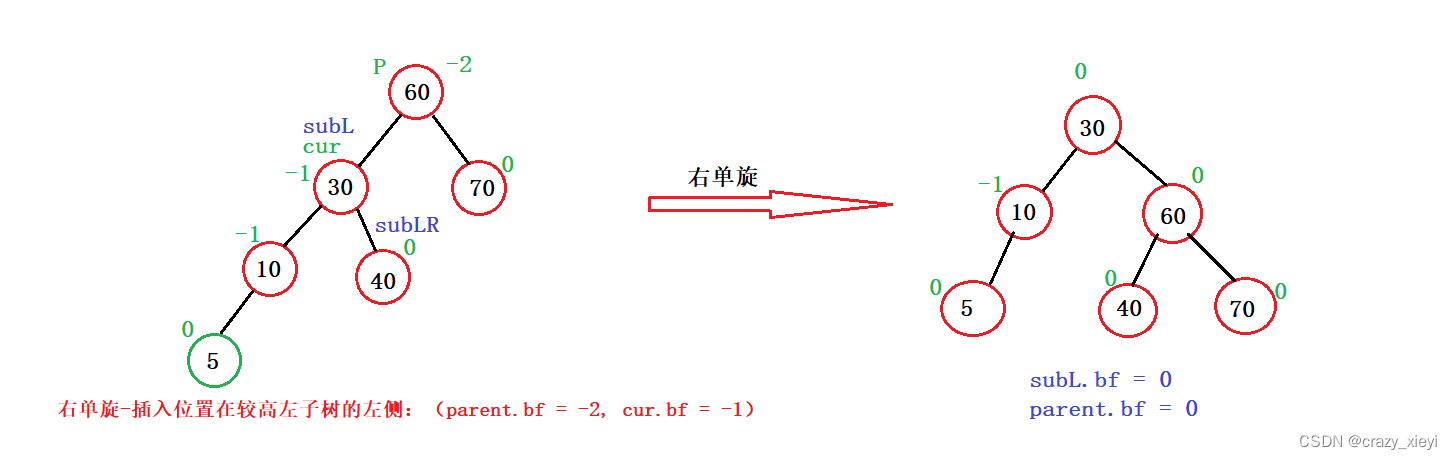
//右单旋private void rotateRight(TreeNode parent) {TreeNode subL = parent.left;TreeNode subLR = subL.right;parent.left = subLR;subL.right = parent;if (subLR != null){subLR.parent = parent;}//必须先记录当前的父亲的父亲节点TreeNode pParent = parent.parent;parent.parent = subL;//检查当前节点是不是根节点if (parent == root){root = subL;root.parent = null;}else {//不是根节点,判断这颗子树是左子树还是右子树if (pParent.left == parent){pParent.left = subL;}else {pParent.right = subL;}subL.parent = pParent;}subL.bf = 0;parent.bf = 0;}左右双旋-插入位置在较高左子树的右侧:(parent.bf = -2, cur.bf = 1)
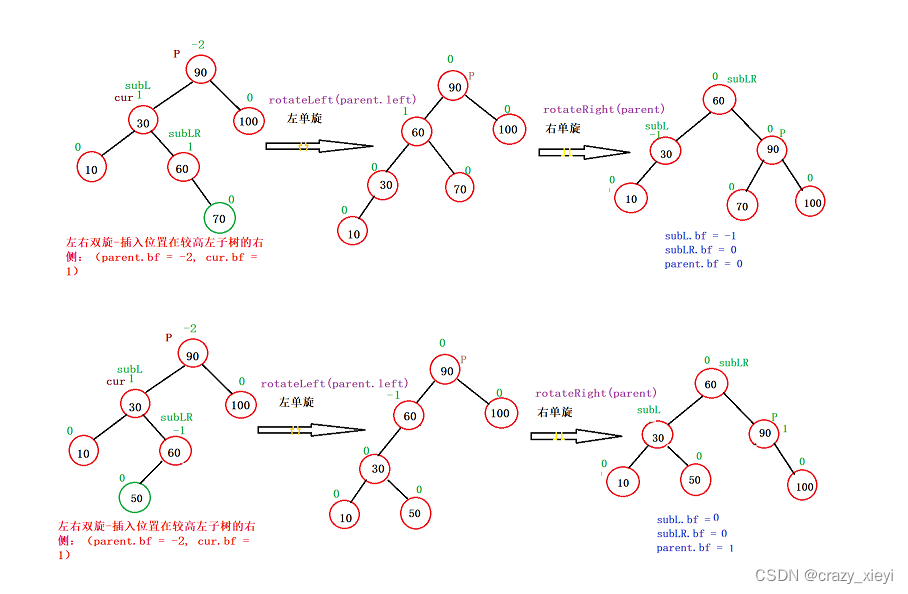
//左右双旋private void rotateLR(TreeNode parent) {TreeNode subL = parent.left;TreeNode subLR= subL.right;int bf = subLR.bf;rotateLeft(parent.left);rotateRight(parent);if (bf == -1){subL.bf = 0;subLR.bf = 0;parent.bf = 1;}else if (bf == 1){subL.bf = -1;subLR.bf = 0;parent.bf = 0;}}右左双旋-插入位置在较高右子树的左侧:(parent.bf = 2, cur.bf = -1)
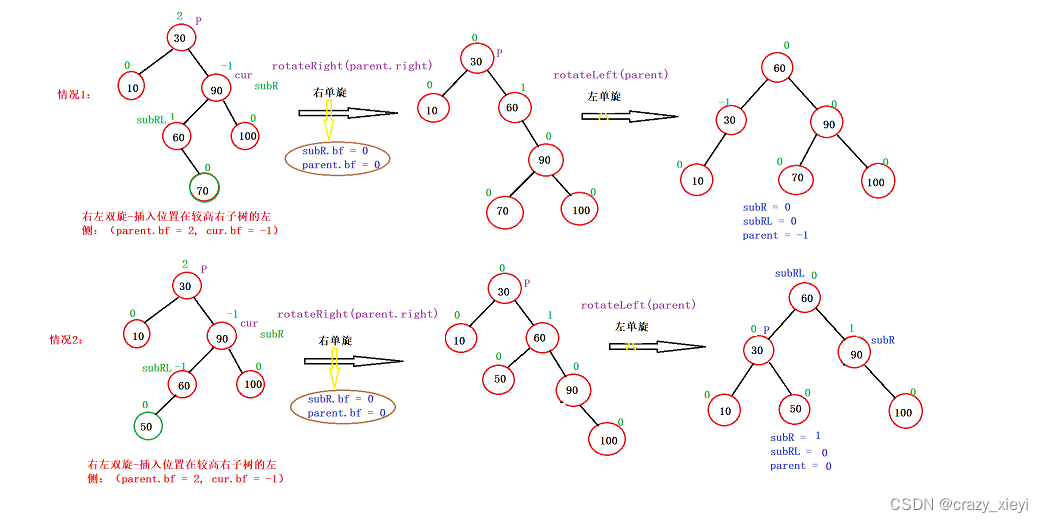
private void rotateRL(TreeNode parent) {TreeNode subR = parent.right;TreeNode subRL = subR.left;int bf = subRL.bf;rotateRight(parent.right);rotateLeft(parent);if (bf == 1){subR.bf = 0;subRL.bf = 0;parent.bf = -1;}else if (bf == -1){subR.bf = 1;subRL.bf = 0;parent.bf = 0;}}AVL树插入操作的完整代码+验证代码
public class AVLTree {static class TreeNode{public int val;public int bf;//平衡因子public TreeNode left;public TreeNode right;public TreeNode parent;public TreeNode(int val){this.val = val;}}//根节点public TreeNode root;public boolean insert(int val){TreeNode node = new TreeNode(val);if (root == null){root = node;return true;}TreeNode parent = null;TreeNode cur = root;while (cur != null){if (cur.val < val){parent = cur;cur = cur.right;}else if (cur.val == val){return false;}else {parent = cur;cur = cur.left;}}if (parent.val < val){parent.right = node;}else {parent.left = node;}node.parent = parent;cur = node;//平衡因子的修改while (parent != null){//先看cur是parent的左还是右 决定平衡因子是++还是--if (cur == parent.right){//如果是右树,那么右树高度增加 平衡因子++parent.bf++;}else {//如果是左树,那么左树高度增加 平衡因子--parent.bf--;}//检查当前的平衡因子 是不是绝对值 1 0 -1if (parent.bf == 0){//说明已经平衡了break;}else if (parent.bf == 1 || parent.bf == -1){//继续向上去修改平衡因子cur = parent;parent = cur.parent;}else {if (parent.bf == 2){//右树高-》需要降低右树的高度if (cur.bf == 1){//左单旋rotateLeft(parent);}else {//cur.bf == -1rotateRL(parent);}}else {//parent.bf == -2 左树高-》需要降低左树的高度if (cur.bf == -1){//右单旋rotateRight(parent);}else {//cur.bf == 1//左右双旋rotateLR(parent);}}//上述代码走完就已经平衡了break;}}return true;}private void rotateRL(TreeNode parent) {TreeNode subR = parent.right;TreeNode subRL = subR.left;int bf = subRL.bf;rotateRight(parent.right);rotateLeft(parent);if (bf == 1){subR.bf = 0;subRL.bf = 0;parent.bf = -1;}else if (bf == -1){subR.bf = 1;subRL.bf = 0;parent.bf = 0;}}//左右双旋private void rotateLR(TreeNode parent) {TreeNode subL = parent.left;TreeNode subLR= subL.right;int bf = subLR.bf;rotateLeft(parent.left);rotateRight(parent);if (bf == -1){subL.bf = 0;subLR.bf = 0;parent.bf = 1;}else if (bf == 1){subL.bf = -1;subLR.bf = 0;parent.bf = 0;}}//左单旋private void rotateLeft(TreeNode parent) {TreeNode subR = parent.right;TreeNode subRL= subR.left;parent.right = subRL;subR.left = parent;if (subRL != null){subRL.parent = parent;}TreeNode pParent = parent.parent;parent.parent = subR;if (parent == root){root = subR;root.parent = null;}else {if (pParent.left == parent){pParent.left = subR;}else {pParent.right = subR;}subR.parent = pParent;}subR.bf = 0;parent.bf = 0;}//右单旋private void rotateRight(TreeNode parent) {TreeNode subL = parent.left;TreeNode subLR = subL.right;parent.left = subLR;subL.right = parent;if (subLR != null){subLR.parent = parent;}//必须先记录当前的父亲的父亲节点TreeNode pParent = parent.parent;parent.parent = subL;//检查当前节点是不是根节点if (parent == root){root = subL;root.parent = null;}else {//不是根节点,判断这颗子树是左子树还是右子树if (pParent.left == parent){pParent.left = subL;}else {pParent.right = subL;}subL.parent = pParent;}subL.bf = 0;parent.bf = 0;}//中序遍历public void inorder(TreeNode root){if (root == null)return;inorder(root.left);System.out.print(root.val + " ");inorder(root.right);}private int height(TreeNode root){if (root == null)return 0;int leftHeight = height(root.left);int rightHeight = height(root.right);return leftHeight > rightHeight ? leftHeight+1 : rightHeight+1;}public boolean isBalanced(TreeNode root){if (root == null)return true;int leftHeight = height(root.left);int rightHeight = height(root.right);if (rightHeight-leftHeight != root.bf){System.out.println("这个节点:"+root.val + "有异常!");return false;}return Math.abs(leftHeight-rightHeight) <= 1&& isBalanced(root.left)&& isBalanced(root.right);}
}AVL树的删除
因为AVL树也是二叉搜索树,可按照二叉搜索树的方式将节点删除,然后再更新平衡因子,只不过与删除不
同的是,删除节点后的平衡因子更新,最差情况下一直要调整到根节点的位置。
1、找到需要删除的节点
2、按照搜索树的删除规则删除节点--参考https://blog.csdn.net/crazy_xieyi/article/details/127627063
3、更新平衡因子,如果出现了不平衡,进行旋转。--单旋,双旋
AVL树的性能分析
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询
时高效的时间复杂度,即 。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要
维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。因此:如果需要
一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修
改,就不太适合。
相关文章:
二叉搜索树之AVL树
AVL树的概念二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年 发明了一种解决上…...
全栈自动化测试技术笔记(二):准备工作的切入点
自动化测试技术笔记(二):准备工作的切入点 上篇整理的技术笔记,聊了自动化测试的前期调研工作如何开展,最后一部分也提到了工作的优先级区分。 这篇文章,接上篇文章的内容,来聊聊自动化测试前期的准备工作࿰…...
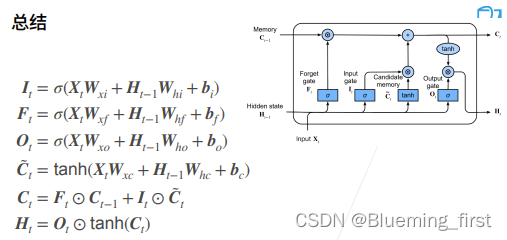
57 长短期记忆网络(LSTM)【动手学深度学习v2】
57 长短期记忆网络(LSTM)【动手学深度学习v2】 深度学习学习笔记 学习视频:https://www.bilibili.com/video/BV1JU4y1H7PC/?spm_id_fromautoNext&vd_source75dce036dc8244310435eaf03de4e330 长短期记忆网络(LSTM)…...
算法第十五期——动态规划(DP)之各种背包问题
目录 0、背包问题分类 1、 0/1背包简化版 【代码】 2、0/ 1背包的方案数 【思路】 【做法】 【代码】 空间优化1:交替滚动 空间优化2:自我滚动 3、完全背包 【思路】 【代码】 4、分组背包 核心代码 5、多重背包 多重背包解题思路1:转化…...
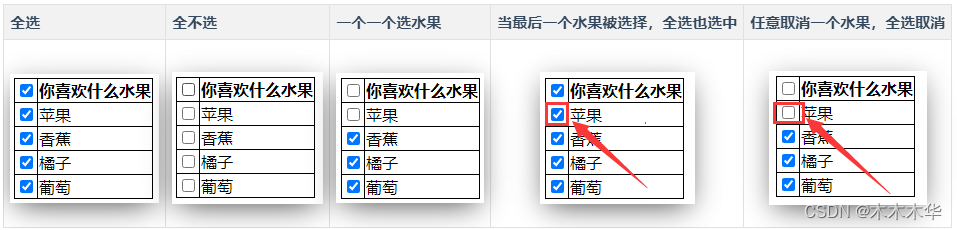
实现复选框全选和全不选的切换
今天,复看了一下JS的菜鸟教程,发现评论里面都是精华呀!! 看到函数这一节,发现就复选框的全选和全不选功能展开了讨论。我感觉挺有意思的,尝试实现了一下。 1. 全选、全不选,两个按钮ÿ…...

React hooks之useState用法(一)
系列文章目录 学习React已经有很长的一段时间了,今天决定重新回顾一下跟React相关的一些知识点 文章目录系列文章目录结构如下一、hooks是什么?useState可以能做什么二、如何使用useState()第一步:创建【函数组件&…...
spring的简单理解
目录 1 .ioc容器(控制反转) 2. Aop面向切面编程 3. 事务申明 4. 注解的方式启动 5. spring是什么与他的优势 6. 代理设计模式(比如aop) 7. springmvc中相应json数据 8. 使用lombok来进行对代码的简化 9. 使用logback记录…...
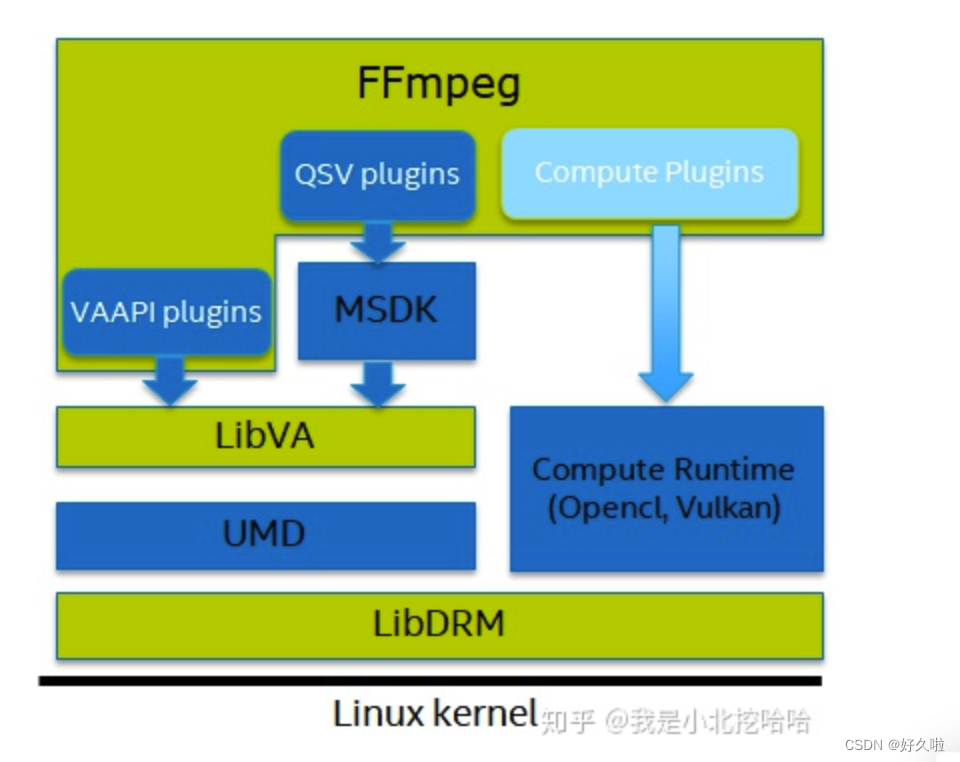
Docker调用Intel集显实现FFmpeg硬解码
文章目录Docker调用Intel集显实现FFmpeg硬解码参考FFmpeg 集成qsv方式一 容器完成所有步骤方式二 容器完成部分步骤方式三 dockerfile部署Docker调用Intel集显实现FFmpeg硬解码 参考 ffmpeg_qsv_docker拉取该镜像可以实现FFmpeg集成vaapi的硬加速,通过dockerfile文…...

端到端模型(end-to-end)与非端到端模型
一、端到端(end to end) 从输入端到输出端会得到一个预测结果,将预测结果和真实结果进行比较得到误差,将误差反向传播到网络的各个层之中,调整网络的权重和参数直到模型收敛或者达到预期的效果为止,中间所…...
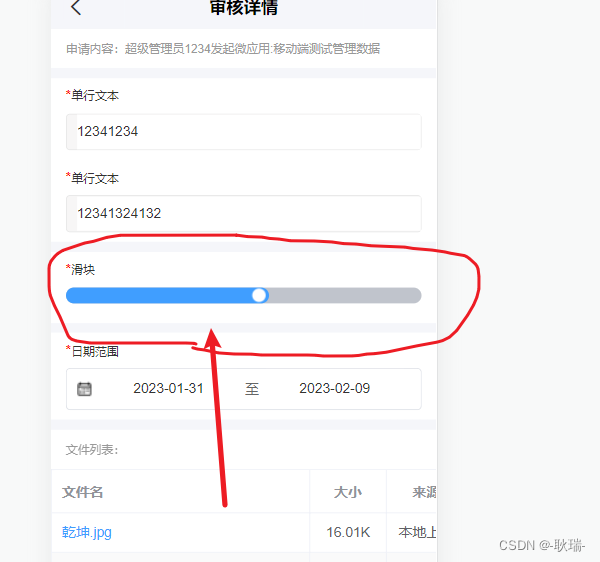
uniApp封装一个滑块组件
最近 项目中有一个需求 PC端动态设计的表单 移动端要能渲染出来 那么 就要去找到对应的组件 而其中 没有的 就包括滑块 没有又能怎么办 只能自己封装一个 我们直接上代码 <template><view class"u-slider" tap"onClick" :class"[disabled…...

运动基元(二):贝塞尔曲线
贝塞尔曲线是我第一个深入接触并使用于路径规划的运动基元。N阶贝塞尔曲线具有很多优良的特性,例如端点性、N阶可导性、对称性、曲率连续性、凸包性、几何不变性、仿射不变性以及变差缩减性。本章主要介绍贝塞尔曲线用于运动基元时几个特别有用的特性。 一、贝塞尔曲线的定义 …...

Android 11.0 关于Launcher3中调用截图功能总是返回null的解决方案
1.1概述 在11.0的系统产品开发中,在某些时候需要调用截图接口来进行截屏功能实现,而在Launcher3中发现调用系统截屏接口SurfaceControl.screenshot进行截图的时候始终为null, 获取不到系统当前页面的截屏功能,所以需要找到当前截屏失败的原因然后来实现截屏功能的实现,下面来…...

random随机数
random随机数 1.概述 random用来生成一些随机数,下面介绍random模块提供的方法根据需求生成不同的随机数。 2.random常用操作 2.1.random默认随机数 random()函数返回一个随机的浮点值,默认返回值范围在0 < n < 1.0区间 import randomfor i …...
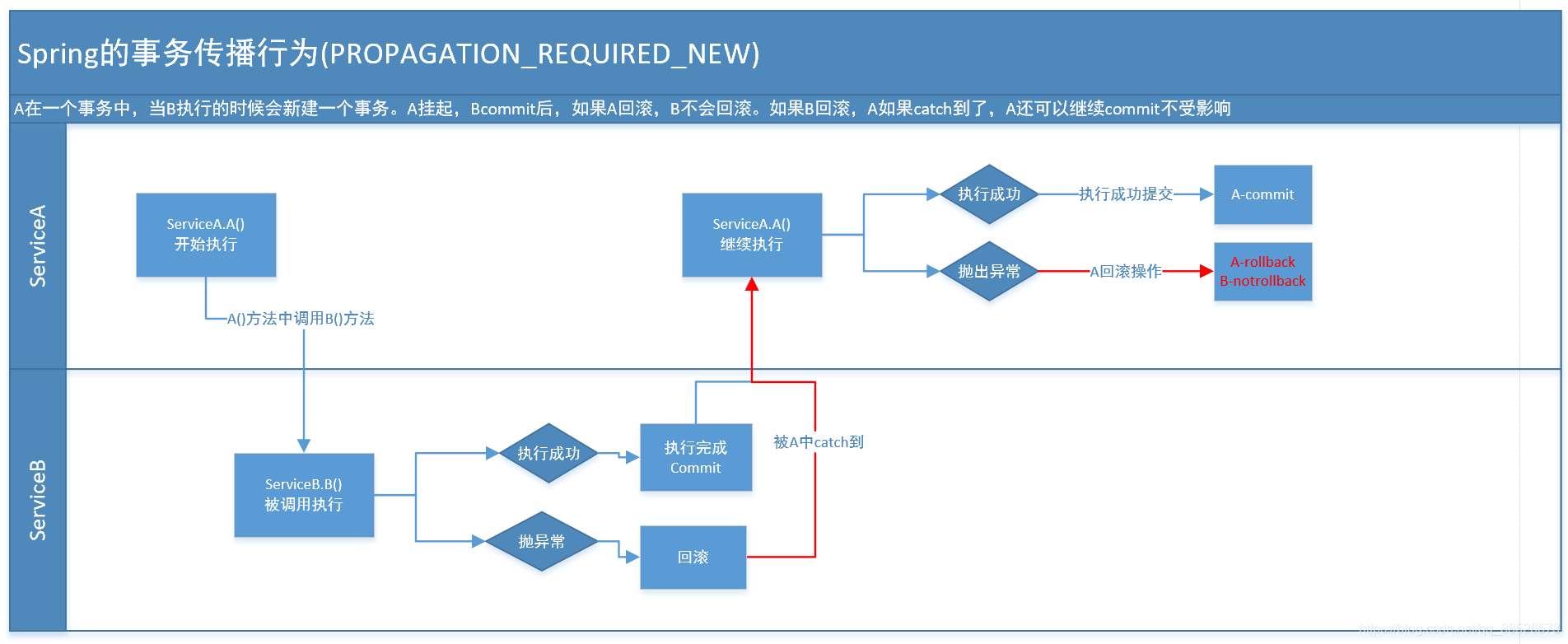
【金三银四系列】Spring面试题-上(2023版)
Spring面试专题 1.Spring应该很熟悉吧?来介绍下你的Spring的理解 有些同学可能会抢答,不熟悉!!! 好了,不开玩笑,面对这个问题我们应该怎么来回答呢?我们给大家梳理这个几个维度来回答 1.1 Spring的发展历程 先介绍…...

linux基本功系列之tar命令实战
文章目录前言一. tar命令介绍二. 语法格式及常用选项三. 参考案例3.1 仅打包不压缩3.2 打包后使用调用压缩命令进行压缩3.3 列出文件的内容3.4 追加文件到tar命令中3.5 释放文件到指定的目录四 . 各种压缩方式的比较总结前言 大家好,又见面了,我是沐风晓…...
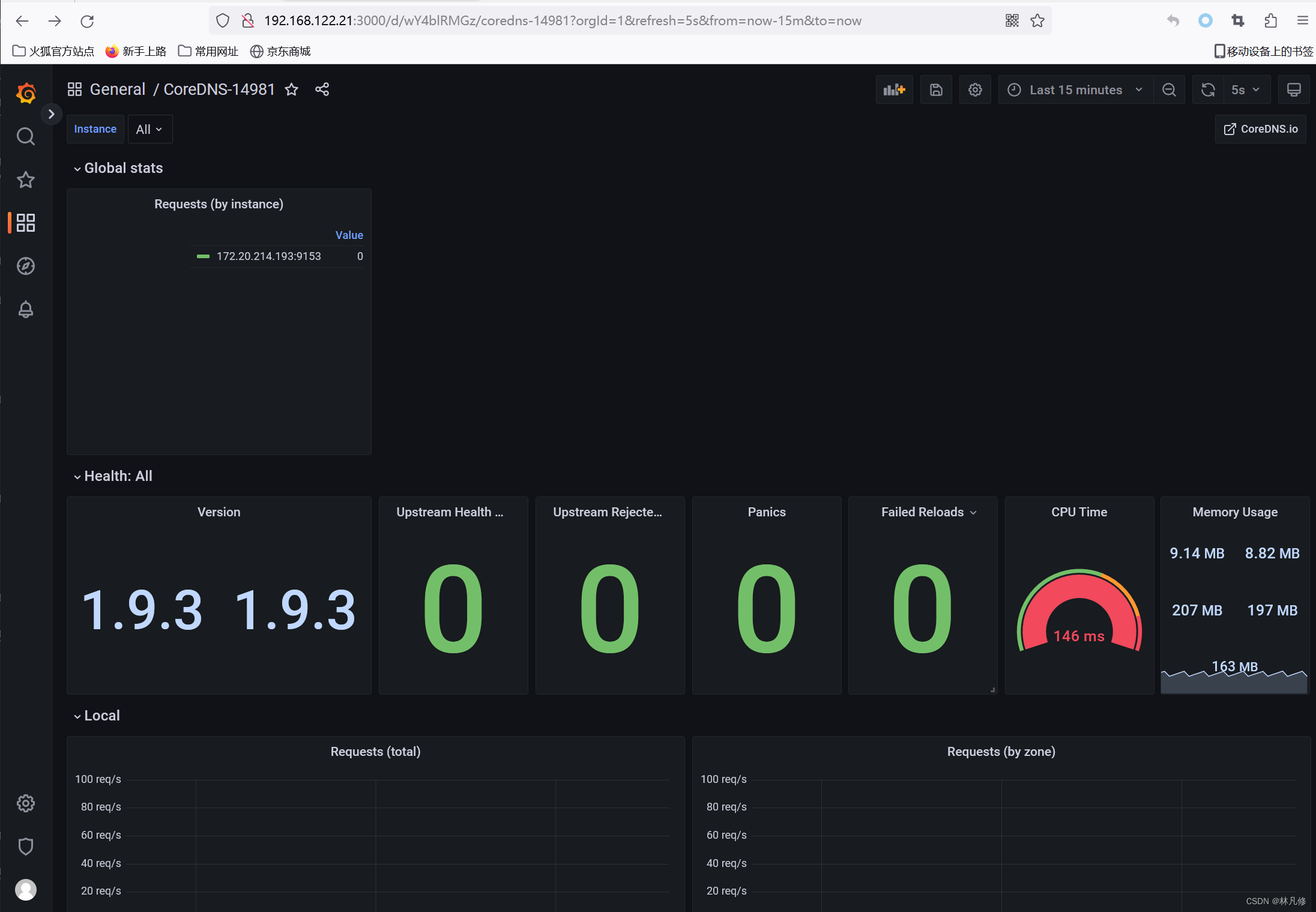
Prometheus服务发现
Prometheus服务发现介绍 Prometheus默认是采用pull的方式拉取监控数据的,每一个被抓取的目标都要暴露一个HTTP接口,prometheus通过这个接口来获取相应的指标数据,这种方式需要由prometheus-server决定采集的目标服务器有哪些,通过…...
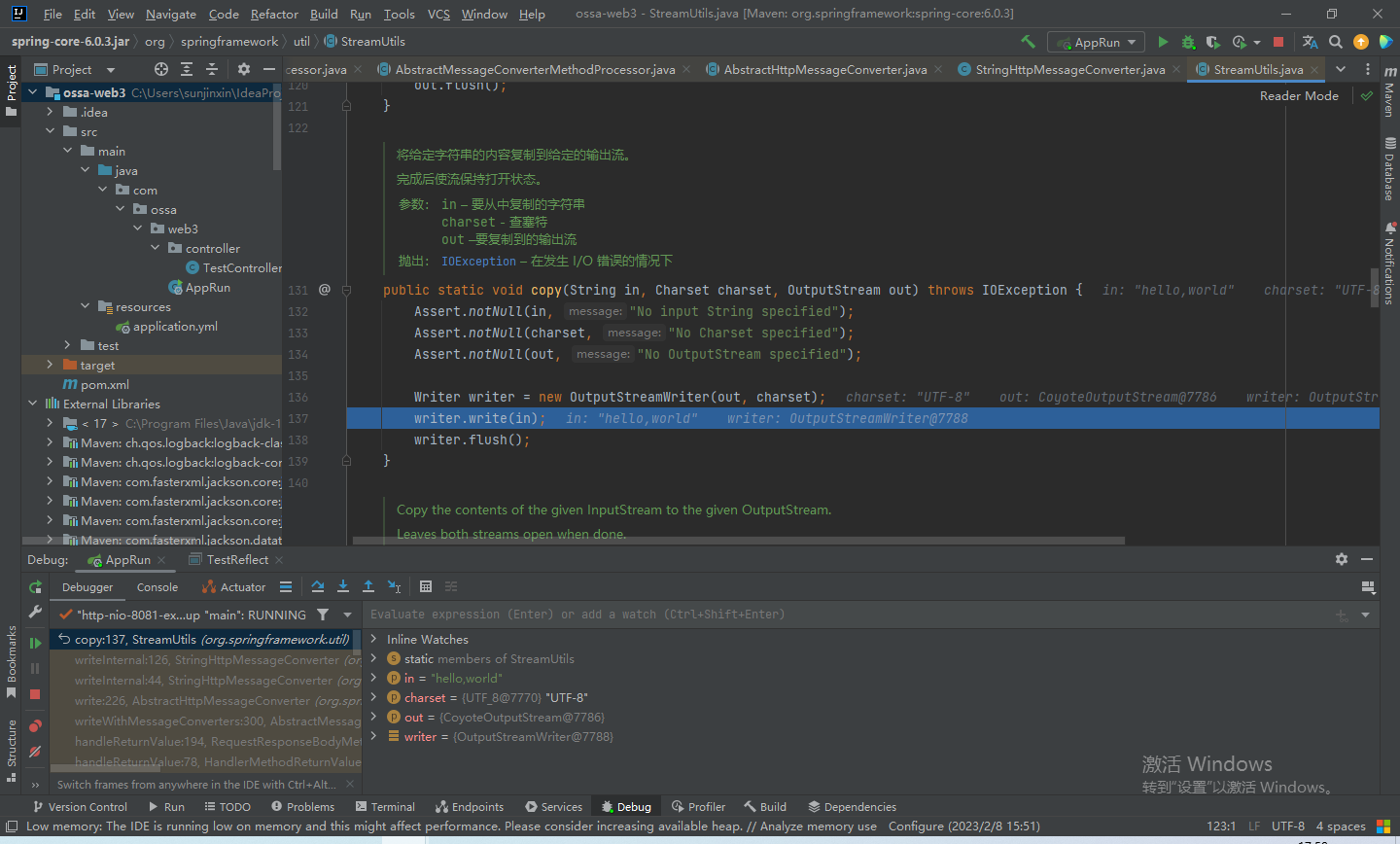
【Spring6源码・MVC】请求处理流程源码解析
上一篇《【Spring6源码・MVC】初始化registry,完成url和controller的映射关系》我们知道,在IOC容器加载的同时,初始化了registry这个HashMap,这个HashMap中存放了请求路径和对应的方法。当我们请求进来,会通过这个regi…...

elasticsearch term match 查询
1. 准备数据 PUT h1/doc/1 {"name": "rose","gender": "female","age": 18,"tags": ["白", "漂亮", "高"] }PUT h1/doc/2 {"name": "lila","gender&quo…...
canal使用说明:MySQL、Redis实时数据同步
1. canal简介 canal是阿里开源的数据同步工具,基于bin log可以将数据库同步到其他各类数据库中,目标数据库支持mysql,postgresql,oracle,redis,MQ,ES等 canal分成服务端deployer和客户端adapter,我们可以部署多个,同时为了方便管…...
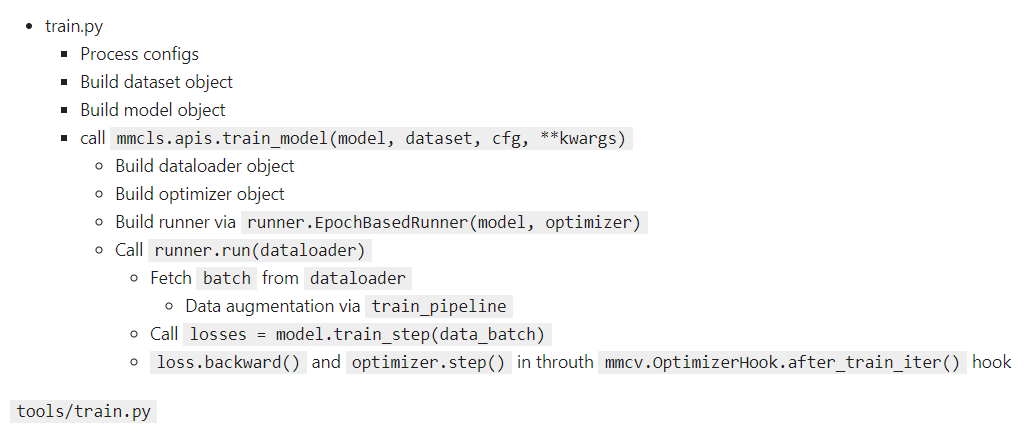
计算机视觉框架OpenMMLab开源学习(三):图像分类实战
前言:本篇主要偏向图像分类实战部分,使用MMclassification工具进行代码应用,最后对水果分类进行实战演示,本次环境和代码配置部分省略,具体内容建议参考前一篇文章:计算机视觉框架OpenMMLab开源学习&#x…...

终极游戏模组管理指南:Nexus Mods App如何让你轻松玩转模组世界
终极游戏模组管理指南:Nexus Mods App如何让你轻松玩转模组世界 【免费下载链接】NexusMods.App Home of the development of the Nexus Mods App 项目地址: https://gitcode.com/gh_mirrors/ne/NexusMods.App 厌倦了手动安装模组时的各种冲突和兼容性问题&a…...

一次性掌握Mapbox地图开发框架
又到一年毕业季,春招已经基本结束,选择不考研直接就业的同学,如果5月还没拿到offer,接下来只能等暑期实习岗位,再晚一点就只能等秋招了。想找WebGIS相关的岗位,可以通过各种企业官方招聘网站、大众招聘平台…...

CANN 显存优化深度解析:梯度累积、混合精度与显存回收实战
CANN 显存优化深度解析:梯度累积、混合精度与显存回收实战显存不够跑不了大模型?这篇讲清楚昇腾上的显存优化技术,从原理到实践。显存问题诊断流程 OOM 报错 → 检查模型大小 → 分析梯度占用 → 定位瓶颈 → 选择优化方案显存问题是大模型训…...

5分钟快速获取微信数据库密钥:Sharp-dumpkey完整指南
5分钟快速获取微信数据库密钥:Sharp-dumpkey完整指南 【免费下载链接】Sharp-dumpkey 基于C#实现的获取微信数据库密钥的小工具 项目地址: https://gitcode.com/gh_mirrors/sh/Sharp-dumpkey 当你的微信聊天记录被加密锁定,无法备份或迁移时&…...

对比直接使用厂商 API 观察通过 Taotoken 进行成本管理的便利性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商 API 观察通过 Taotoken 进行成本管理的便利性 对于需要同时调用多个大语言模型的个人开发者或小项目而言&#x…...

我让 QClaw 接管了跨部门协作的“脏活累活“——从拉群到催进度的一键化实战
我让 QClaw 接管了跨部门协作的"脏活累活"——从拉群到催进度的一键化实战作者:在 5 个微信群、3 个企微群、2 个 TAPD 项目里同时被 的研发同学 适合人群:每天被"拉群-同步-催进度-写会议纪要"切碎的研发 / 产品 / 项目经理0. 先说…...
:从浏览器控制台Network面板抓包→识别ERR_CONNECTION_RESET本质→绕过运营商深度包检测(附可执行Shell脚本))
ChatGPT网络错误自救流程图(2024新版):从浏览器控制台Network面板抓包→识别ERR_CONNECTION_RESET本质→绕过运营商深度包检测(附可执行Shell脚本)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT网络错误自救流程图(2024新版)概述 当访问 ChatGPT 时遭遇“Network Error”、“Failed to fetch”、“504 Gateway Timeout”或“Connection refused”等提示࿰…...

GRETNA脑网络分析工具包:MATLAB中的图论网络分析终极指南
GRETNA脑网络分析工具包:MATLAB中的图论网络分析终极指南 【免费下载链接】GRETNA A Graph-theoretical Network Analysis Toolkit in MATLAB 项目地址: https://gitcode.com/gh_mirrors/gr/GRETNA GRETNA(Graph-theoretical Network Analysis To…...

测试工程师转型AI训练师,我的薪资直接翻了2倍
从“保证软件质量”到“教会模型思考”,这条路我走了三年,薪资从18K涨到了38K。如果你现在还在点点点、写用例、跑自动化的循环里打转,并且隐约感到天花板正在压下来,那么我的经历或许能给你提供一份可复制的地图。一、为什么测试…...

LLM语言大模型的企业应用案例
本文系统梳理 2025-2026 年国内外 7 款主流大语言模型(LLM)在企业中的成功部署案例,覆盖金融、汽车、旅游、政务、医疗五大行业,每个案例均包含部署步骤、数据准备、改善效果数字及经验教训,为企业 AI 落地提供可借鉴的…...