Keras中model.evaluate() 返回的是 loss value 和 metrics values
Keras官方文档: https://keras.io/models/model/#evaluate
Keras中model.evaluate() 返回的是 损失值和训练时选定的指标值(例如,['AUC', , 'accuracy'])。
训练时选定的指标值是指model.compile()里面metrics=后面的值,evaluate()返回值顺序也与其一致。
相关文章:
 返回的是 loss value 和 metrics values)
Keras中model.evaluate() 返回的是 loss value 和 metrics values
Keras官方文档: https://keras.io/models/model/#evaluate Keras中model.evaluate() 返回的是 损失值和训练时选定的指标值(例如,[AUC, , accuracy])。 训练时选定的指标值是指model.compile()里面metrics后面的值,ev…...

CSRF跨域请求伪造
1.SSRF服务端请求伪造(外网访问内网) SSRF(Server-Side Request Forgery:服务器端请求伪造) 是一种由攻击者构造形成由服务端发起请求的一个安全漏洞。一般情况下,SSRF是要目标网站的内部系统。(因为他是从内部系统访问的…...
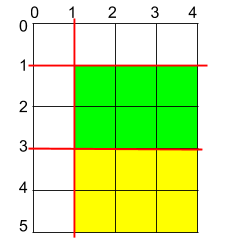
LeetCode 1465. 切割后面积最大的蛋糕:纵横分别处理
【LetMeFly】1465.切割后面积最大的蛋糕:纵横分别处理 力扣题目链接:https://leetcode.cn/problems/maximum-area-of-a-piece-of-cake-after-horizontal-and-vertical-cuts/ 矩形蛋糕的高度为 h 且宽度为 w,给你两个整数数组 horizontalCut…...

YTM32的增强型定时器eTMR外设模块详解
文章目录 eTMR外设简介eTMR工作机制系统框图引脚与信号计数器与时钟源输出比较模式PWM模式通道配对通道对的互补输出(Complementary Mode)双缓冲输出PWM(Double Switch)错误检测机制(Fault Detection) 输入…...
40.查找练习题(王道2023数据结构第7章)
试题1(王道7.2.4节综合练习5): 写出折半查找的递归算法。 #include<stdio.h> #include<stdlib.h> #include<string.h>#define MAXSIZE 10 #define ElemType int #define Status inttypedef struct{int data[MAXSIZE]; /…...

Segmentation fault 的bug解决
一,Segmentation fault 的bug解决 问题描述:自己在使用CPU上调试完代码之后,可以稳定运行,有输出结果。 但是把数据和模型加载上GPU之后,出现了报错。 Segmentation fault (core dumped) 搜了一下可能存在的原因&…...

【Python机器学习】零基础掌握BaggingRegressor集成学习
如何提升回归模型的稳定性和准确性? 在实际生活中,比如房价预测,经常会遇到一种情况:有大量的特征和样本数据,但模型的预测准确度仍然不尽人意。这时候,单一的模型(如支持向量机回归)可能表现得并不够好。 考虑到这个问题,解决方案可能是使用集成方法,特别是Baggin…...
麒麟KYLINOS通过命令行配置kysec的防火墙
原文链接:麒麟KYLINOS通过命令行配置kysec的防火墙 hello,大家好啊,今天给大家带来一篇使用命令行配置kysec的防火墙的文章,通过本篇文章的学习,大家可以了解到图形化界面中的防火墙信息是如何生成的,为后期…...

磁盘监控:告警时发送邮件
1.配置邮箱 1.编辑邮箱配置文件 vim /etc/mail.rc2.在末尾输入自己的邮箱配置,以163邮箱为例 #开启ssl set ssl-verifyignore #证书目录,下方为centos系统证书默认位置,也自行生成证书并指定 set nss-config-dir/etc/pki/nssdb # 配置的第…...
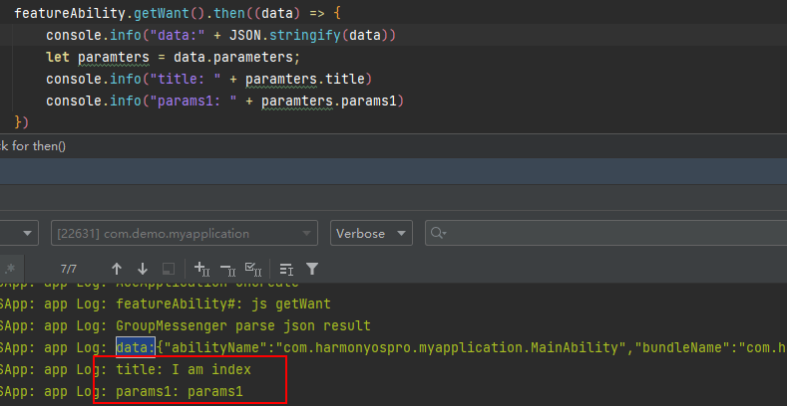
【HarmonyOS】元服务卡片router实现跳转到指定页面并传动态参数
【关键字】 元服务卡片、router跳转不同页面、传递动态参数 【写在前面】 本篇文章主要介绍开发元服务卡片时,如何实现从卡片中点击事件跳转到指定的应用内页面,并传递参数接受参数功能。此处以JS UI开发服务卡片为例,JS卡片支持组件设置ac…...
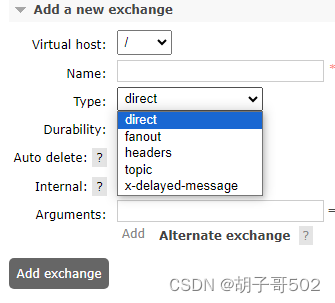
Centos安装RabbitMQ,JavaSpring发送RabbitMQ延迟延时消息,JavaSpring消费RabbitMQ消息
1,版本说明 erlang 和 rabbitmq 版本说明 https://www.rabbitmq.com/which-erlang.html 确认需要安装的mq版本以及对应的erlang版本。 2,下载安装文件 RabbitMQ下载地址: https://packagecloud.io/rabbitmq/rabbitmq-server Erlang下载地…...
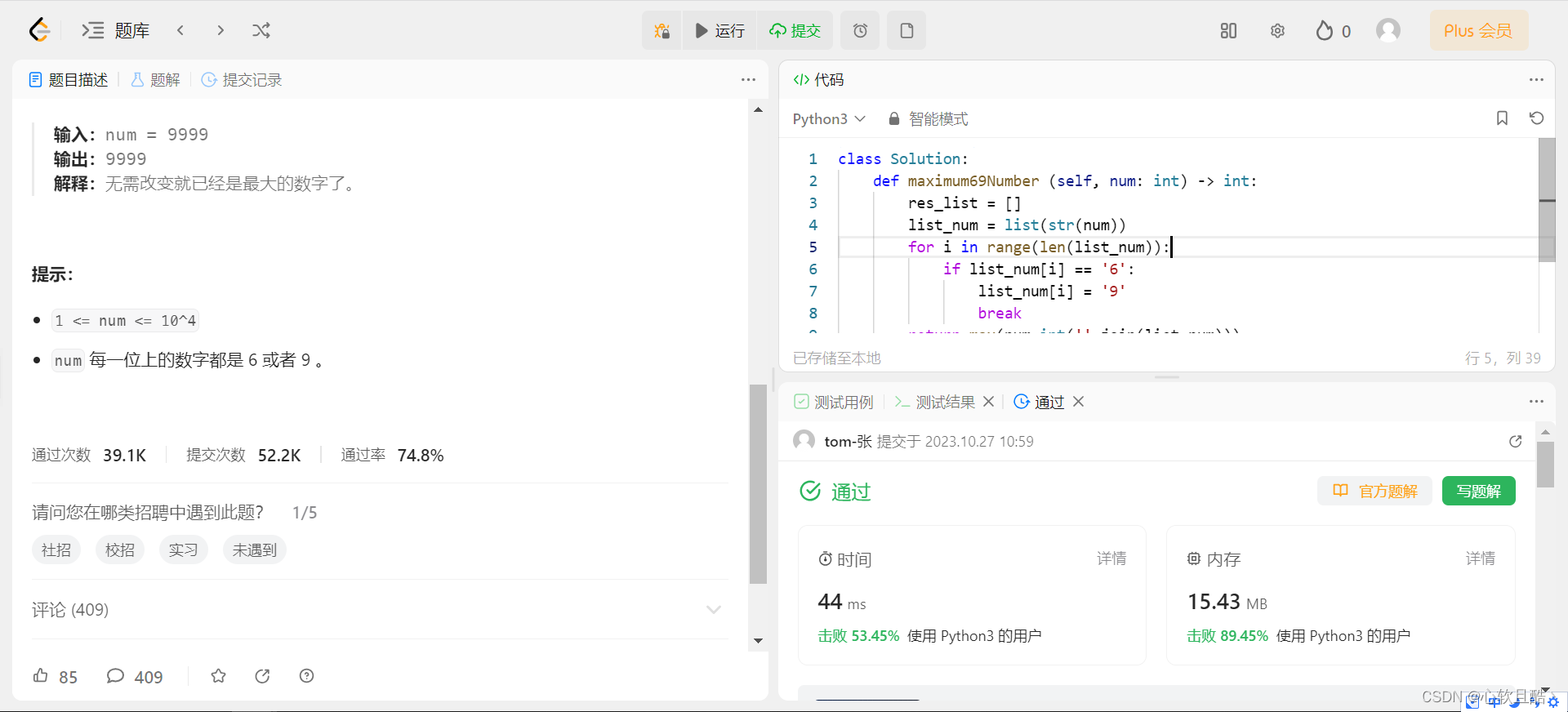
leetcode:1323. 6 和 9 组成的最大数字(python3解法)
难度:简单 给你一个仅由数字 6 和 9 组成的正整数 num。 你最多只能翻转一位数字,将 6 变成 9,或者把 9 变成 6 。 请返回你可以得到的最大数字。 示例 1: 输入:num 9669 输出:9969 解释: 改变…...
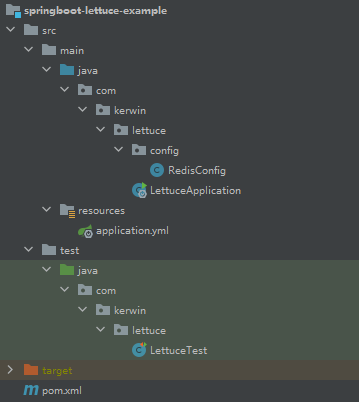
SpringBoot集成Redis Cluster集群(附带Linux部署Redis Cluster高可用集群)
目录 一、前言二、集成配置2.1、POM2.2、添加配置文件application.yml2.3、编写配置文件2.4、编写启动类2.5、编写测试类测试是否连接成功 一、前言 这里会使用到spring-boot-starter-data-redis包,spring boot 2的spring-boot-starter-data-redis中,默…...
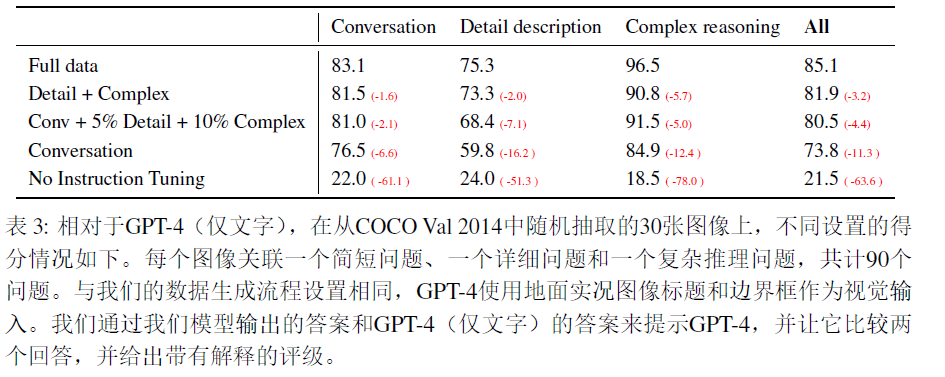
LLaVA:visual instruction tuning
对近期一些MLLM(Multimodal Large Language Model)的总结 - 知乎本文将从模型结构,训练方法,训练数据,模型表现四个方面对近期的一些MLLM(Multi-modal Large Language Models)进行总结并探讨这四个方面对模型表现的影响…...
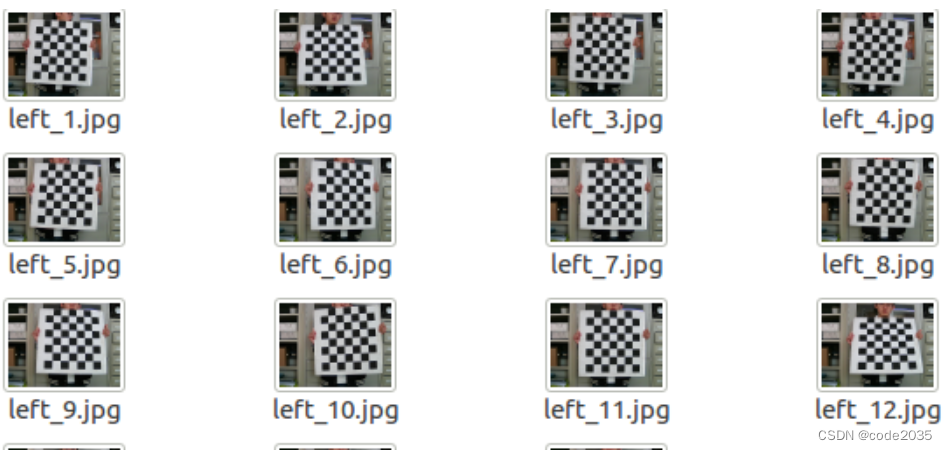
Python实现双目标定、畸变矫正、立体矫正
一,双目标定、畸变矫正、立体矫正的作用 双目目标定: 3D重建和测距:通过双目目标定,您可以确定两个摄像头之间的相对位置和朝向,从而能够根据视差信息计算物体的深度,进行三维重建和测距。姿态估计…...
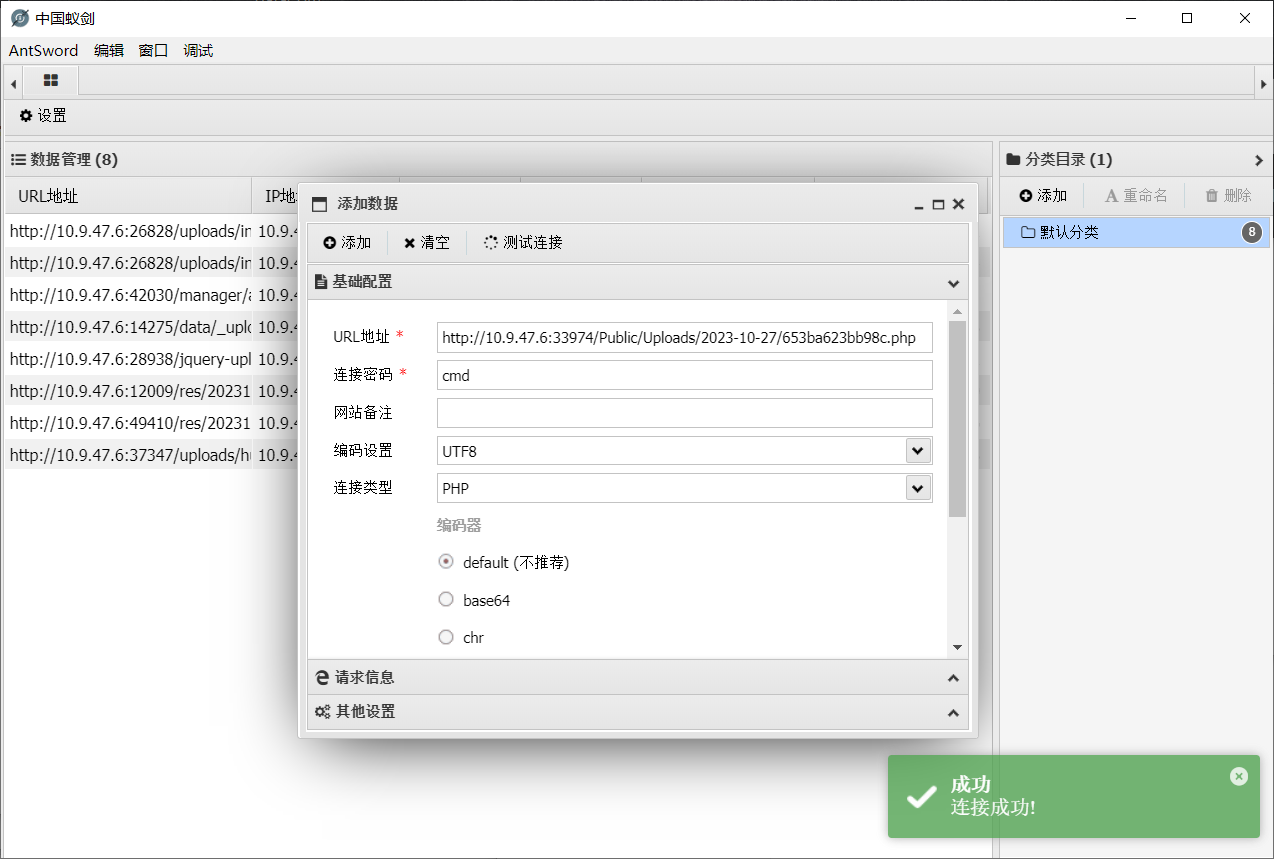
showdoc 文件上传 (cnvd-2020-26585)
showdoc 文件上传 (cnvd-2020-26585) 描述 ShowDoc是一个非常适合IT团队的在线API文档、技术文档工具。通过showdoc,你可以方便地使用markdown语法来书写出美观的API文档、数据字典文档、技术文档、在线excel文档等等。 api_page存在任意文…...

Java数据类型,变量与运算符
1.字面常量 常量是在程序运行期间,固定不变的量称为常量。 public class HelloWorld{public static void main(String[] args){System.out.println("Hello,world");} } 在以上程序中,输出的Hello Word,其中的“Hello Word”就是…...

Linux nm命令
Linux的nm命令主要用于列出对象文件中的符号。以下是一些使用示例: 基本用法:只需运行’nm’命令,并将对象文件的名称作为输入传递给它。例如,我使用’nm’命令与’apl’elf 文件:nm apl。 在输出中为每个符号前面添加…...

iOS发布证书.p12文件无密码解决办法及导出带密码的新.p12文件方法
摘要: 本文将以iOS技术博主身份,分享解决使用无密码的.p12文件发布应用时遇到的问题,并介绍如何以带密码的方式重新导出.p12文件的方法。通过本文提供的步骤,开发者可以顺利完成证书的发布流程。 引言 在iOS应用发布过程中&…...

OpenCamera拍照的代码流程
按理来说,拍照应该是很简单的。随着功能的复杂,代码也是越来越多,流程越来越长。想看看地理位置是怎么保存的,于是就研究了一下OpenCamera的拍照流程。在回调时有点乱。 MainActivity clickedTakePhoto() takePicture() takePic…...

ArcSWAT建模踩坑记:你的土壤数据库参数算对了吗?聊聊SPAW的那些默认值和单位陷阱
ArcSWAT土壤参数校准实战:避开SPAW计算中的5个致命误区 当水文模拟结果与实测数据出现系统性偏差时,经验丰富的建模者会首先检查土壤参数——这个隐藏在界面背后的"沉默变量"往往是误差的最大来源。SPAW作为ArcSWAT推荐的土壤参数计算工具&…...

移动端大语言模型本地部署:从模型轻量化到推理引擎实战
1. 项目概述:当GPT遇见移动端,一个开源项目的诞生最近在GitHub上闲逛,发现了一个挺有意思的项目,叫Taewan-P/gpt_mobile。光看名字,你大概就能猜到它的核心:把类似GPT这样的大语言模型(LLM&…...

ncmdumpGUI:3分钟掌握网易云音乐ncm格式转换的终极方案
ncmdumpGUI:3分钟掌握网易云音乐ncm格式转换的终极方案 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经在网易云音乐下载了心爱的歌曲&a…...

YimMenu:GTA V终极游戏增强工具完整实战手册
YimMenu:GTA V终极游戏增强工具完整实战手册 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMenu …...

Wand-Enhancer:零成本解锁WeMod高级功能的完整指南
Wand-Enhancer:零成本解锁WeMod高级功能的完整指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的订阅费用而犹豫不决吗…...

Applite:macOS软件管理的最佳图形化方案,告别繁琐命令行
Applite:macOS软件管理的最佳图形化方案,告别繁琐命令行 【免费下载链接】Applite User-friendly GUI macOS application for Homebrew Casks 项目地址: https://gitcode.com/gh_mirrors/ap/Applite 还在为macOS软件安装更新而烦恼吗?…...

解密VideoDownloadHelper:开源浏览器插件的智能视频提取技术
解密VideoDownloadHelper:开源浏览器插件的智能视频提取技术 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 当你在浏览微博、秒拍…...

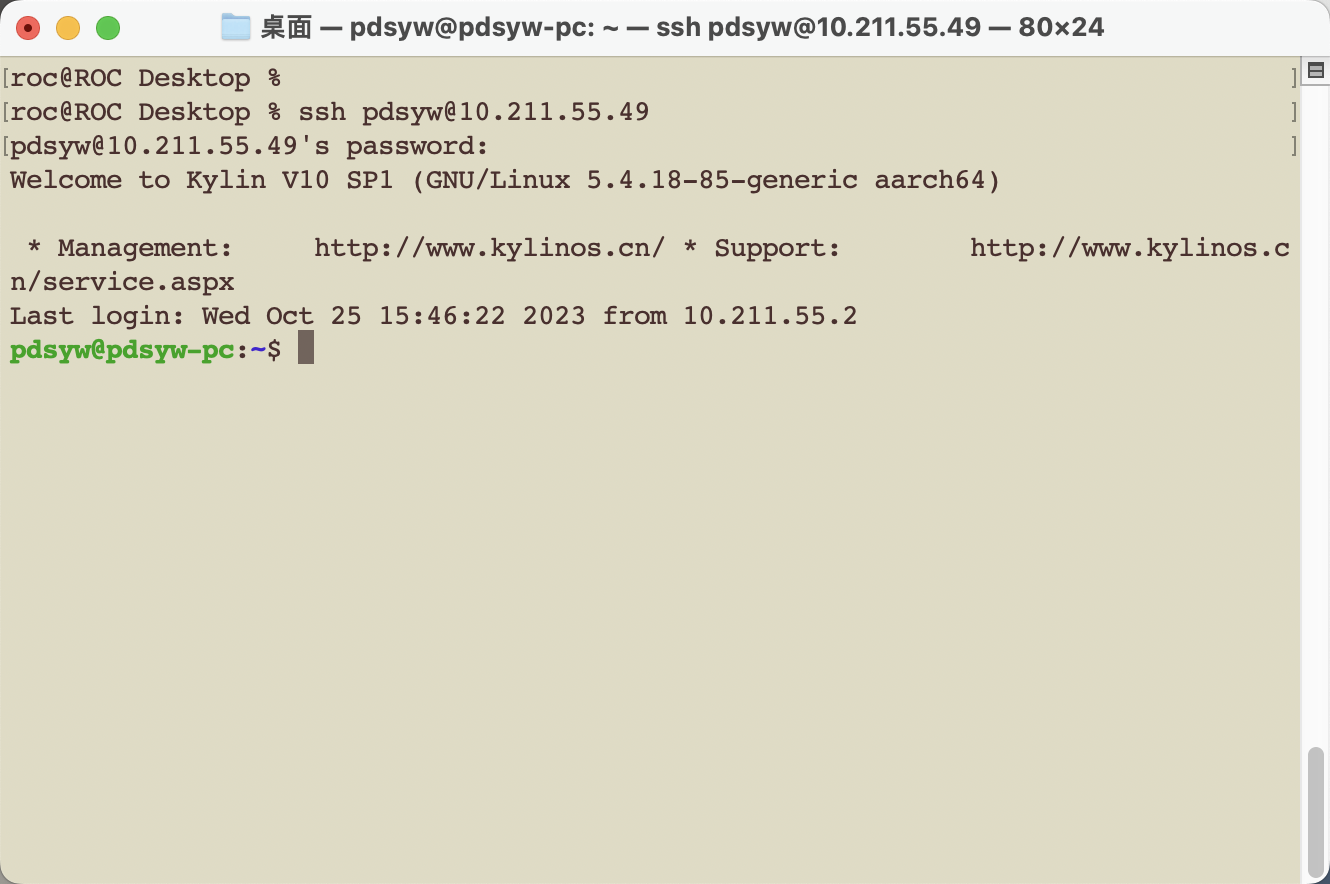
基于MCP协议的AI Agent远程SSH安全操作实践指南
1. 项目概述与核心价值最近在折腾AI Agent的开发,发现一个挺有意思的现象:很多开发者都卡在了“如何让AI安全、可控地操作远程服务器”这一步。你可能会想到直接给AI一个SSH私钥,但这无异于把自家大门的钥匙扔给一个还在学习走路的机器人&…...

Lingoose:轻量级LLM编排框架的设计哲学与工程实践
1. 项目概述:从“Lingo”到“Goose”,一个轻量级LLM编排框架的诞生最近在折腾大语言模型应用开发的朋友,估计都绕不开一个核心问题:如何高效、优雅地编排和串联多个LLM调用、工具调用以及数据处理流程?当你从简单的单次…...

3步强力清理:Pearcleaner让你轻松解决Mac应用残留文件问题
3步强力清理:Pearcleaner让你轻松解决Mac应用残留文件问题 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾删除Mac应用后,发…...