自动驾驶感知算法面经(20+)
原文链接: https://zhuanlan.zhihu.com/p/656952371
本人2022年4月和2023年7月两次跳槽找工作,面经总结在这里,希望可以帮到需要的朋友。
项目相关的问题主要和经历有关,参考性不大。
2023年7月
1. 文远知行
-
自动标注算法岗位
-
项目经历问的不深
-
coding两道题。
-
leetcode 55 跳跃游戏。 -
NMS python。
2. 易控智驾
面试体验较差,不说了。
3. 斑马
-
coding:买卖股票基础版
-
工作时间早十点,晚上八九点
4. 蔚来
第一轮:
-
项目问的比较细 -
几个公开数据集的
lidar区别,对点云、模型检测的影响 -
domain adaption相关的方法,
如何缩放点云 -
radar检测的具体优化。
pointnet和pointnet++的区别 -
pnp calibration -
栏杆检测为什么不用网络学习?
-
BN的mean和std的dimension,
有哪些可学习的参数,train和test的时候怎么用 -
coding:python 计算两批shape不一样的box的IoU。不用for循环。
-
numpy的broadcast
-
自认为有技术领先性
第二轮:
-
问的都是些比较抽象的问题
-
对视觉3d检测算法的了解。
-
举例工作中遇到的困难,(技术/项目),如何解决的
-
对之前公司的感知算法的问题,看法认识
-
对未来自动驾驶算法的看法
-
coding:
未知形式的函数f(x),零点在[-1,1], 求零点,精度要求1e-4
5. 有个机器人
-
纯纯八股文
-
c++语言特性,构造函数,析构函数 -
batch norm是什么,原理 -
MLP是什么,
欠拟合,过拟合, -
是否了解
量化,剪枝 -
目前是lidar为主,未来会加camera。
-
主要是做小型物流机器人。
-
在做安防机器人。
-
感知团队5-6个人,包括深度学习,slam。
-
上班时间10-7 。
-
大小周 周六上班。
6. 井松智能
没问什么技术问题,主要介绍下项目
要去合肥出差
工作时间:九点半到六点半
7. 商汤
-
智慧城市
-
没问项目就开始coding
-
coding两道题:
NMS,用pytorch手写一个transformer或者conv+bn+fc
8. 禾赛科技
第一轮:
-
项目问的很细
-
卡尔曼滤波Q和R怎么调 -
c++ 解释
多态,在哪些场景应用过 -
vector和list的差别,底层实现,各种操作复杂度 -
template是否算一种多态?如果不在.h里面定义他的函数,在.cpp里面定义会有什么问题?
-
公司的优势:软硬件一体,易于沟通解决问题
-
客户的不同硬件平台,不同的功能需求。
第二轮:
-
又问了些项目相关的问题。
-
一堆点,找最大凸包。无序的话 用什么排序?极点排序,最慢O(n^2)
第三轮:
-
现场面试
-
介绍下最有成就感的一个项目。 -
coding:快排,时间复杂度为什么是O(NlogN)
-
c++ segment fault如何debug -
vector 和list底层实现,基础操作复杂度 -
问了些性格相关的问题
9. 字节aml
没有问八股,问了些大模型的较新的技术进展
llama,MAE,flamingo
transformer的encoder和decoder,position encoding,rope。
10. oppo研究院
第一轮:
-
问了项目中涉及到
检测跟踪的算法 -
十几个人 四个方向。检测跟踪2个人,做手机相册相关算法
-
c++ vector底层实现,基本操作复杂度, -
虚函数,设计模式有哪些,用过哪些设计模式
第二轮:
- 介绍下某项目中对模型做了哪些优化
yolov5,v6,v7
-
clip有什么问题。为什么,适合什么场景 -
segement anything:prompt如何输入进网络 -
认为自己擅长算法的哪些方面
-
有些算法是外包的,准备转为自研
11. navinfo四维图新
-
泊车感知算法
-
传感器:超声波传感器和鱼眼相机
-
L2行车泊车。今年年中/年末交付
-
自动驾驶在内部相对独立。
-
图像感知在北京。
-
超声波传感器换了新版。输出的信息更多了,需要招人来。
-
国资背景
-
众包地图
-
上半年刚进行改革。压力比较小。
-
八小时弹性。无事不加班。
12. 商汤自动驾驶
第一轮:
-
了解哪些
目标检测算法,各自的优缺点(anchor,anchor free,transformer) -
传感器标定是怎么做的
-
domain adaption怎么做的
-
描述两次代码重构的过程和思想
-
描述卡尔曼滤波的过程,具体如何解决问题的
-
后融合怎么做的,速度的gt如何得到
-
coding:dbscan
第二轮:
-
是否
了解learning的tracking? -
是否了解
sota的bev感知算法 -
是否能接受加班
13. 理想第一轮。
- 早九晚六/七
– c++写的很多
-
coding;岛屿数量,延伸:如何统计不同形状的岛屿,如何对不同形状建模表示
-
描述下dbscan过程
-
c++ 为什么要用引用传参
-
目前lidar和融合一共20人
14. 地平线(合资)
第一轮:
-
加班没有特别频繁。上海会新开office在虹桥/张江。
-
coding:快排
第二轮:
-
问的c++问题相对较难:
-
内存分配,内存池
-
野指针,一般是什么情况下会产生,如何避免
- 智能指针,如何实现一个shared_ptr类,各个成员函数什么时候调用,成员变量什么时候更新。
-
new一个新对象时候发生了什么,
如何能只创建对象不分配空间? -
调用一个派生类的构造函数时发生了什么?
15. 英伟达
-
自动驾驶support岗位,每周去车上测试一次
-
描述图像resize的过程并实现
-
c++编译出现undefined reference如何debug
-
迁移软件时,出现找不到的binary怎么解决
-
c++多态,虚函数,构造函数可以是虚函数吗,为什么 -
内存泄漏如何避免
-
c++模板,应用场景
-
智能指针,
shared_ptr,unique_ptr -
指针和引用
-
external
-
感受野怎么算,如果有branch
-
描述NMS过程
-
yolo和ssd的box后处理的具体过程
-
transformer的self-attention过程
-
softmax为了让输出更稳定做了什么
2022年4月
ps:以下记录的公司相关的信息已经不太可信
1. 滴滴
·第一轮:·
-
pointnet input transform,feature transform· -
coding 834. Sum of Distances in Tree hard,dp+2dfs -
C++ set和ordered set底层实现,insert和erase的复杂度
第二轮:
-
英文自我介绍&几个简单的问题
-
主要问的
tracking,ukf有没有用,具体的R如何根据mean和std调整 -
coding https://www.techiedelight.com/find-triplet-with-given-sum-bst/
-
bst遍历的时间复杂度,3sum用左右指针的时间复杂度:O(N^2)
- Time complexity of all BST Operations = O(h).
- Here, h = Height of binary search tree
2. 轻舟智航
第一轮:
-
pointnet input transform,feature transform, -
max-pooling可以用什么替代?怎样可以降低nx1024的参数量? -
batch norm解决了什么问题?有什么优缺点?需要学习哪些参数?还有其他什么norm? -
L1和L2 regularization,什么作用,具体怎么实现的,什么区别,和weight decay什么关系 -
卡尔曼滤波器,P,Q,R怎么决定K和协方差阵的? -
状态量在平面坐标系,观测量在极坐标系,效果不好? -
coding 547. Number of Provinces graph dfs -
dfs的时间复杂度:O(N^2) 因为每个节点都要去遍历他的children,相当于两层循环
-
c++:
-
vector底层实现,空间是连续的吗?vector变量存在堆上还是栈上?里面的每一个值存在堆上还是栈上? -
unordered map和map,有序还是无序?底层实现,insert和erase的复杂度
3. ecarx亿咖通
第一轮
-
coding:DBSCAN -
主要业务:智能座舱+自动驾驶
-
芯片:xinqing科技
-
感知主要是lidar和camera
-
去年(2021年)获得了hdmap甲级资质
第二轮:
-
radar 后融合 直接用cluster
-
偏向于lidar和camera
-
目前还在实现大部分功能
-
前装,乘用车,
-
主线:多V,多R,多lidar
-
高速+城区,逐步release
-
双休,九点半到八点,不打卡
-
徐汇滨江西岸
-
平台,系统更大,自动驾驶,芯片,智能座舱,
-
港股上市,
-
和tech lead面试的问题:
-
团队的组成?二十多个人做NN模型,研究生,平均四五年以上,大感知团队:有博士,
-
zhijia,小鹏,mmt,华为,
-
自己开发的训练模型的平台,pytorch。
-
平时有发paper或者刷榜的计划安排吗? 会和平时的工作相结合,互相验证。
-
比较看重员工的什么能力?技术能力,沟通。创造力。
-
做到25年的规划。
-
23年单V落地。
-
主要客户:泊车,adas,吉利汽车下面的。还有一些联合开发。
4. 纵目
-
一轮技术面:
-
更复杂的tracking算法。
-
传感器raw data。
-
前融合。
-
freespace 用雷达
-
视觉->系统供应商->雷达
-
毫米波雷达感知七八个人,还有信号处理,一共100多人。华为,美团,江淮。
hr面试:
-
工作时间 九点半,五点半/六点半。双休,没有打卡
-
毫米波雷达感知七八个人
-
同一批人做量产/预研
-
中级/高级差不多各一半。
-
总监 工作了十几年。比较平衡。
-
有mentor
-
张江
5. 采埃孚
-
ukf, -
除了
hm之外的其他匹配算法 -
观测和预测的相似度计算
-
PQR都是怎么设置的 -
单例模式和工厂模式的区别
6. 感铠科技
-
L2,L3,adas功能实现,主要在底特律
-
尝试前融合,目前是用原始radar detection和vision
-
4d radar 从硬件到软件
-
初创公司
-
有期权
-
乘用车
-
公司名字可能会改,四月份确定
-
项目制,
-
马上要A轮
-
在新江湾城
7. 文远知行
第一轮:
-
卡尔曼滤波,怎么用同一个filter同时适配车辆横穿的场景 -
感受野计算。 -
centernet等基于center的recall不够高,有什么办法来改善 -
做二分类,有80%的数据是标注正确的,20%是标注失败的,如何训练? -
anchor-base和anchor-free的优劣; -
如果anchor-based的方法,设置很多不同的anchor,对于非正常宽高比的物体以及小目标会有改善吗,除了计算速度以外会有什么其他问题
-
c++11之后的新特性有没有用过
-
智能指针
void test (const std::vector<shared_ptr<xxx>>& aaa){aaa[0].b += 1;}
编译能不能通过
std::vector<int> generate()和void generate(std::vector<int>*)哪个效率高
一般是第二个效率高,因为函数返回值默认会赋值一份空间,除非编译器有做return value optimization
-
单例模式的实现:static、全局变量、指针判断(默认是空,每次用的时候判断是不是空,空就创建一个)
-
coding:二叉树的直径 543 -
上海这边一共50人,
感知6~7个人, -
大家同时做几个产品线,通用算法
-
毫米波雷达和视觉相关都有
第二轮:
-
coding:105. 从前序与中序遍历序列构造二叉树, 7. 整数反转
-
环卫车项目,要在广州2个月左右,目前是二三十个人,主要是基于已有的融合,tracking框架加入环卫车特有的一些规则
后面稳定下来后可以参与感知算法
8. 极氪科技
-
面试官是radar负责人
-
7,8点下班
-
coding:区间合并 56
-
目前毫米波雷达只有两个人
-
背靠吉利,在供应商面前占有强势地位,有conti的4d radar在手
-
目前可以拿到传感器目标级和点云级的输入
-
毫米波雷达在高速上比较重要,未来会扩展城区场景
-
主要来自蔚来,华为
第二轮:
-
面试官是感知负责人
-
感知包括定位等,一共目标一百六七十,
-
感知算法,目标检测这边目标八九十。
-
前融合,feature级别的融合
-
量产 要求较高
-
最终目标是城区场景
-
目前是装的eq5
-
也会涉及到lidar,融合等算法
-
九点半之前上班。
9. autox
第一轮:
-coding:number of islands
-unorder_map map区别,unique_ptr
-
int const * const x; const放在*右边,指针的指向不能改,这一行第一个const也可以放到左边,const int也不能改
int * const y; 指向int的const指针,int值可以改,指针指向的地址不能改
const int& i = *y; i的值不能改,read only
int& j =*y; j是别名,可以改,改了的话y指向的变量也会改 -
毫米波雷达感知只有美国一个人,国内十几个人在做autox自己的雷达。
-
也会做和camera,lidar的融合
第二轮:
-
卡尔曼滤波器,要是系统不是线性的会产生什么问题? -
ekf是怎么解决不是线性的问题的?
-匈牙利匹配是一个全局最优的,有没有试过其他的匹配方法
- coding:判断一个点是否在一个旋转的box内
10. pony
`第一轮:
-
coding:https://leetcode.com/problems/binary-tree-maximum-path-sum/
-
问了ssd,yolov3,centernet
第二轮:
-
是否了解radar如何测角测速
-
`coding:无序数组,选三个连续子数组,每个子数组都是两个元素,求这三个子数组的和的最大值
-
用前缀和思想+
-
也会做和lidar,camera的融合,
-
有不同的项目线,基本上用同样的code base,自己决定做哪个项目
-
算法迭代需求主要来自于路测问题和evaluation结果
-
evaluation工具比较完善
11. 千挂
-
主要在北京,一共30, 感知5-6个人,前融合
-
coding:
实现shared_ptr -
两个bst,各选一个数,加起来等于target
12. 主线科技
第一轮:
-
重卡,物流运输,
-
干线物流+港口物流:L4,无安全员。
-
北京:港口,L4前瞻调研,lidar和vision提供general感知,地图等。300人。
-
按照博世系统来,
-
上海:算法十个人,平均工作五年以上
-
去年(2021年)九月份成立,主要是为了高速干线物流量产,落地,合作商用oem top2,radar后融合with lidar和vision,环境搭建,会来一位大佬,做过前后融合,目前没有人做radar,打算招7~8个人。目前是用目标级输出,未来用点云。50人->100人。算法三十人。
第二轮:
-
先做后融合,
-
当前是L2
-
第三轮:
日- 常的工作的大概内容?
-
路测数据,主导开发的原则,
-
比较看重员工的什么能力?
-
背景,学历,个性。
-
主要是Apollo系统,
-
组织架构合理,有凝聚力
-
毫米波雷达+融合。
-
嘉定安亭。上海汽车城大厦。九点到六点半。十一点半到一点午休。没有打卡。
13. 云骥科技
-
第一轮coding: 54. 螺旋矩阵
-
感知15个人,lidar,camera,radar,
-
干线物流,城市货运,乘用出行三个场景,从城市场景开始做?
-
做一个统一的平台,优先做robotaxi。然后做robo bus
-
园区L4无人小巴,计划六月份在上海公共道路
-
robotaxi已经有公司在做了,和友商比较的核心竞争力是什么?域控,有自己的gpu,不用ipc
-
团队完整,资金足够,王京傲的影响力。
-
自驱力,自我成长,团队合作精神。
14. 禾多科技
代客泊车和自动驾驶
第二轮
有多个项目
5R + 1V
5R + 7V
5R + 7V + 3L
一个人会参与多个项目
上海这边感知4/5个人
15. appen澳鹏
第一轮:
澳洲上市的外企
主要工作:数据预处理,后处理,算法开发。
上海有两个分部:local和global。这个岗位负责global业务,准备招4~5个人
流程:本地验证,和annotator合作验证,跑过线上ab test,由engineer部署。
第二轮:
coding:两个排好序的数组,找公有元素。
Product quantization (PQ)
问了概率计算,sample数据实现。
个人的优缺点
主要客户:Google,Apple,
16. 智加
coding:number of islands
量产由其他team负责,这个team负责预研及量产。
17. 商汤
-
点云和图片的区别 -
pointnet为什么没有用conv? -
focal loss的参数如何调 -
有哪些loss -
anchor free和anchor based的区别 -
anchor-free的target assign是怎么做的,怎么解决多个目标中心点位置比较靠近的问题? -
centernet网络输出是什么 -
描述卡尔曼滤波器 -
如果分类问题中几个类别有overlap怎么办,如何设计网络结构 -
是否了解mmdetection的hook -
如果需要在mmdetection中加一个backbone,需要改哪些代码? -
coding:二叉树中序遍历,不用递归
18. 禾赛科技
第一轮:
-
数据,标注,感知,后处理,工程
-
15个人,点云特征,十点-八点
第二轮:
- coding:环形链表,每一个node是一个point(x,y),连起来是一个多边形,判断凸凹性
19. 均胜电子
-
准备单独上市,去年(2021年)刚成立,准备从100人扩张到200人
-
目前有五家公司在谈合作。
-
先做国内再做国外
-
算法:感知10人->20人。
-
主要做L4 taxi,L2,L2++,芯片
-
目前主要在高速场景
-
老板郭济顺
-
客户稳定,传统tier1,有积累,有资源,70%业务来自于国外
-
第二轮:面试官以前在上汽,主要做视觉感知,七八年
-
上海office在莘庄。莘学路。 两栋楼。
-
有食堂。
-
九点-五点。
相关文章:
)
自动驾驶感知算法面经(20+)
原文链接: https://zhuanlan.zhihu.com/p/656952371 本人2022年4月和2023年7月两次跳槽找工作,面经总结在这里,希望可以帮到需要的朋友。 项目相关的问题主要和经历有关,参考性不大。 2023年7月 1. 文远知行 自动标注算法岗位 项目经历问…...
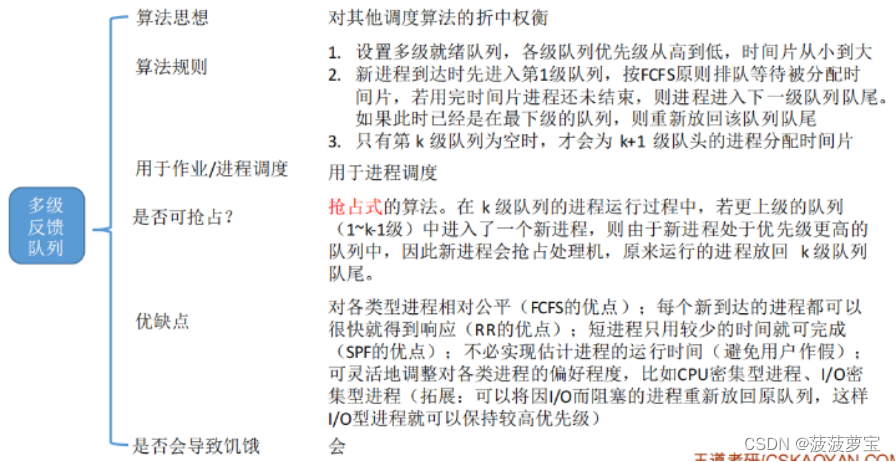
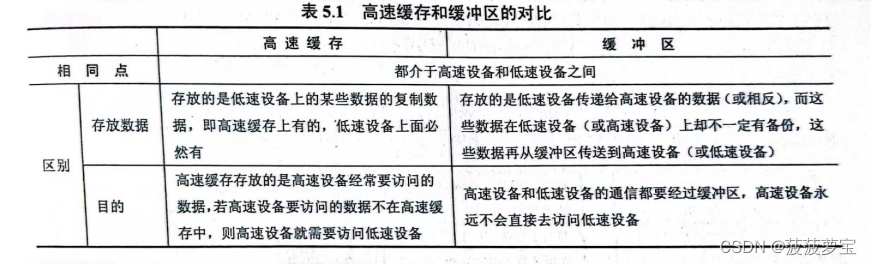
计算机操作系统重点概念整理-第二章 进程管理【期末复习|考研复习】
第二章 进程管理 【期末复习|考研复习】 计算机操作系统系列文章传送门: 第一章 计算机系统概述 第二章 进程管理 第三章 进程同步 第四章 内存管理 第五章 文件管理 第六章 输出输出I/O管理 文章目录 第二章 进程管理 【期末复习|考研复习】前言二、进程管理2.1进…...

如何学好C++?学习C和C++的技巧是什么?
如何学好C?学习C和C的技巧是什么? 你这三个问题,前两个都是意思是差不多的,那么怎么怎么学习C/C我来问答一下:最近很多小伙伴找我,说想要一些C资料,然后我根据自己从业十年经验,熬夜搞了几个通…...

leetcode_39 组合总和
1. 题意 给定一个数组,和一个目标值;求得所有数组中所有和为目标值的元素序列。 组合总数 2. 题解 回溯列举每一个可能的序列,注意去重。 2.1 我的解法 class Solution { public:void gen(vector<vector<int>> &ans,co…...

【登录安全测试】
登录安全测试是确保系统的用户身份验证机制和登录过程的安全性的重要步骤。以下是一些常见的登录安全测试方面的考虑: 账号密码验证:验证系统是否能有效地验证用户的账号和密码,包括对密码长度、复杂性和有效性的限制。测试应包括正常和异常…...
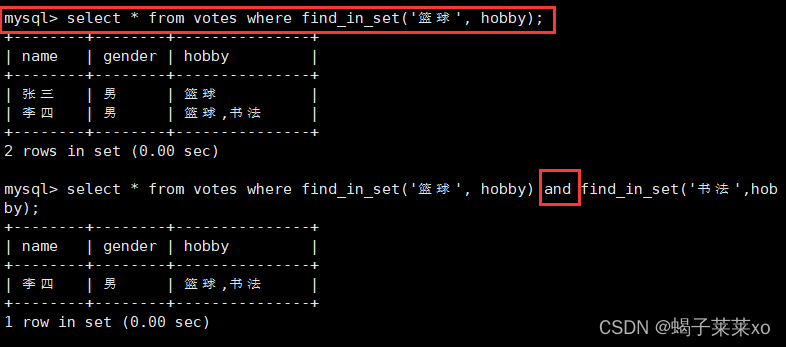
MySQL -- 数据类型
MySQL – 数据类型 文章目录 MySQL -- 数据类型一、数据类型1.数据类型分类2.数值类型2.1.tinyint2.2.bit2.3小数类型 3.字符串类型3.1.char3.2.varchar 4.时间和日期类型5.enum和set 一、数据类型 1.数据类型分类 2.数值类型 2.1.tinyint tinyint类型的数值范围是-128 ~ 127…...

Windows11搭建kafka-python环境
文章目录 安装软件javazookeeperkafka命令行调试环境python-kafka环境参数解释名词解释定义基础架构同步发送、异步发送消息队列的两种模式消费者与消费组幂等性文件清理策略kafka消费模式offset作用kafka消费顺序如何保证参考文献安装软件 java 下载jdk,配置环境变量JAVA_H…...
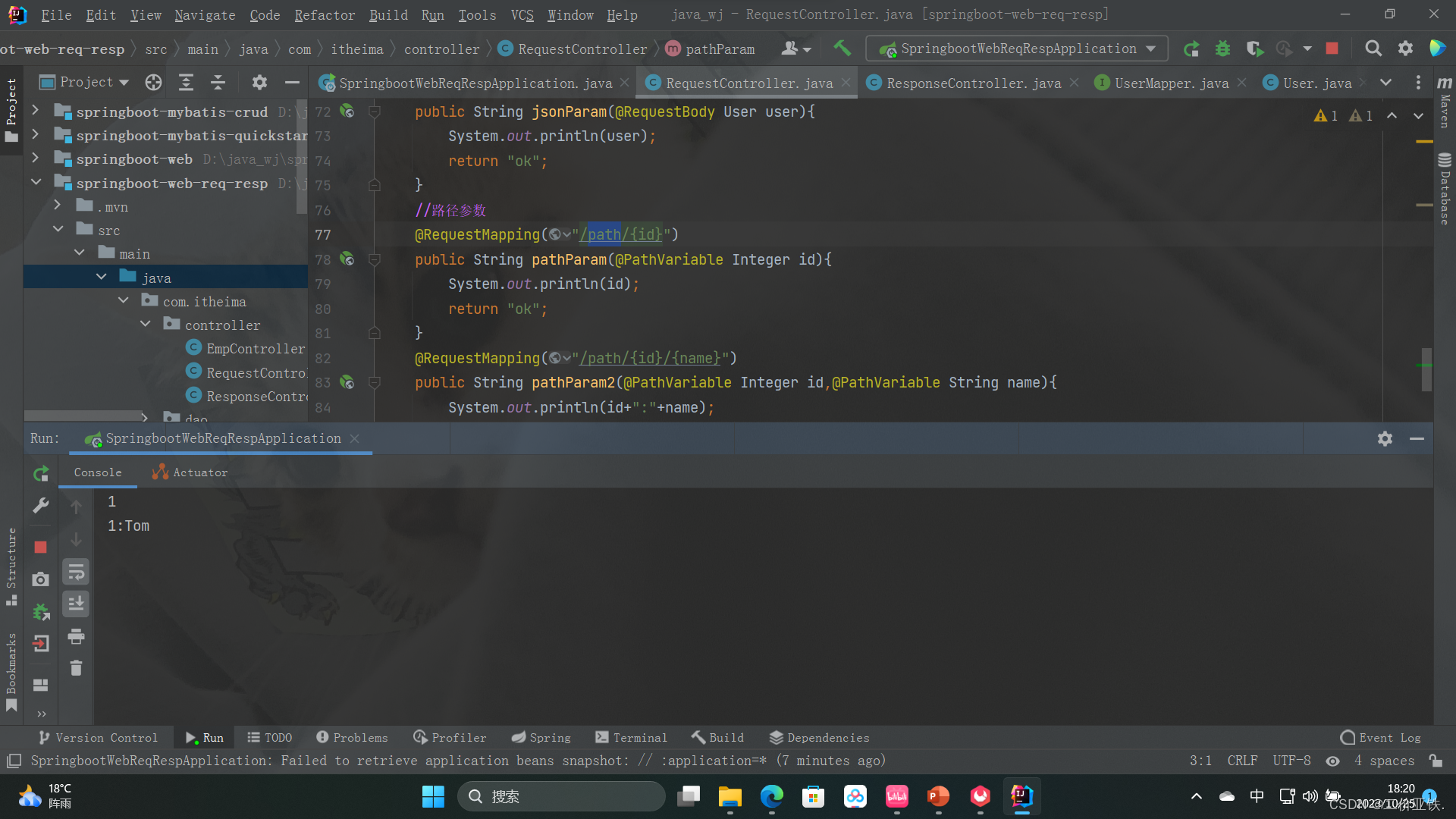
一篇了解springboot3请求参数种类及接口测试
SpringBoot3数据请求: 原始数据请求: //原始方式RequestMapping("/simpleParam")public String simpleParam(HttpServletRequest request){//获取请求参数String name request.getParameter("name");String age request.getParam…...

CFD模拟仿真理论知识:流体仿真应用
CFD模拟仿真理论知识:流体仿真应用 本文将介绍CFD(Computational Fluid Dynamics,计算流体动力学)模拟仿真理论知识的原理、方法和应用。通过本文对CFD的深入理解,并了解如何运用这一理论解决实际问题。...

【springboot单元测试,集成测试】
本文介绍一下SpringBoot中的测试方法 集成测试 SpringBootTest 一个普通的web api RequestMapping RestController public class HelloController {AutowiredRestTemplate restTemplate;GetMapping(value "/api/hi")public Map<String,Object> hello() {S…...

【音视频】音视频开发与学习
音视屏开发与学习 时间:2023年8月12日10:09:29 文章目录 音视屏开发与学习1.资料1.资料 1.资料下载: 这是最新的课程视频教程,如有星球过期的朋友,可以在这个群公告或者私聊我拿资料,这个资料会一直发给大家的,已经在星球的就直接在星球获取资料就行:链接:https://pan.…...

软考系统架构之案例篇(架构设计相关概念)
案例篇-架构设计相关概念 1. 架构风格的概念2. 五大架构风格有哪些3. MVC架构含义4. 云计算架构5. 云原生架构设计原则6. ESB的主要功能包括7. 质量属性的含义及其设计策略8. EJB中的 Bean 分三种类型9. 风险点、敏感点、权衡点的含义10. REST 的5个原则 1. 架构风格的概念 软…...
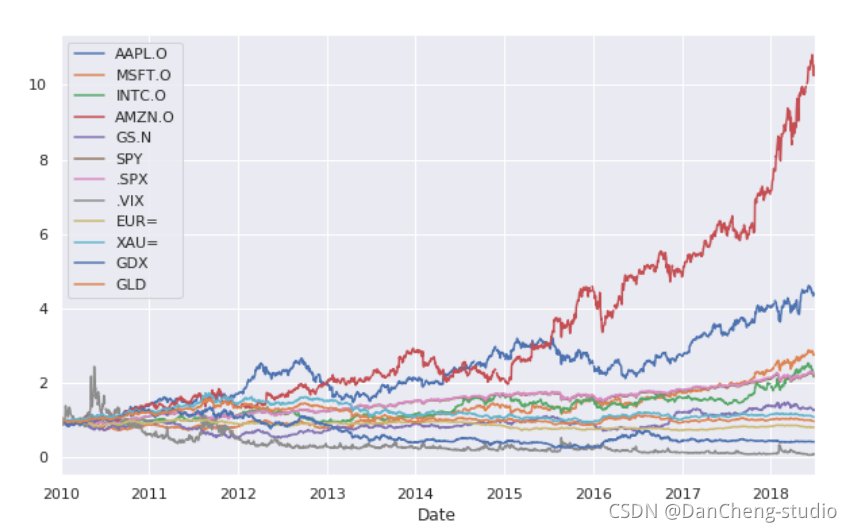
基于大数据的时间序列股价预测分析与可视化 - lstm 计算机竞赛
文章目录 1 前言2 时间序列的由来2.1 四种模型的名称: 3 数据预览4 理论公式4.1 协方差4.2 相关系数4.3 scikit-learn计算相关性 5 金融数据的时序分析5.1 数据概况5.2 序列变化情况计算 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 &…...
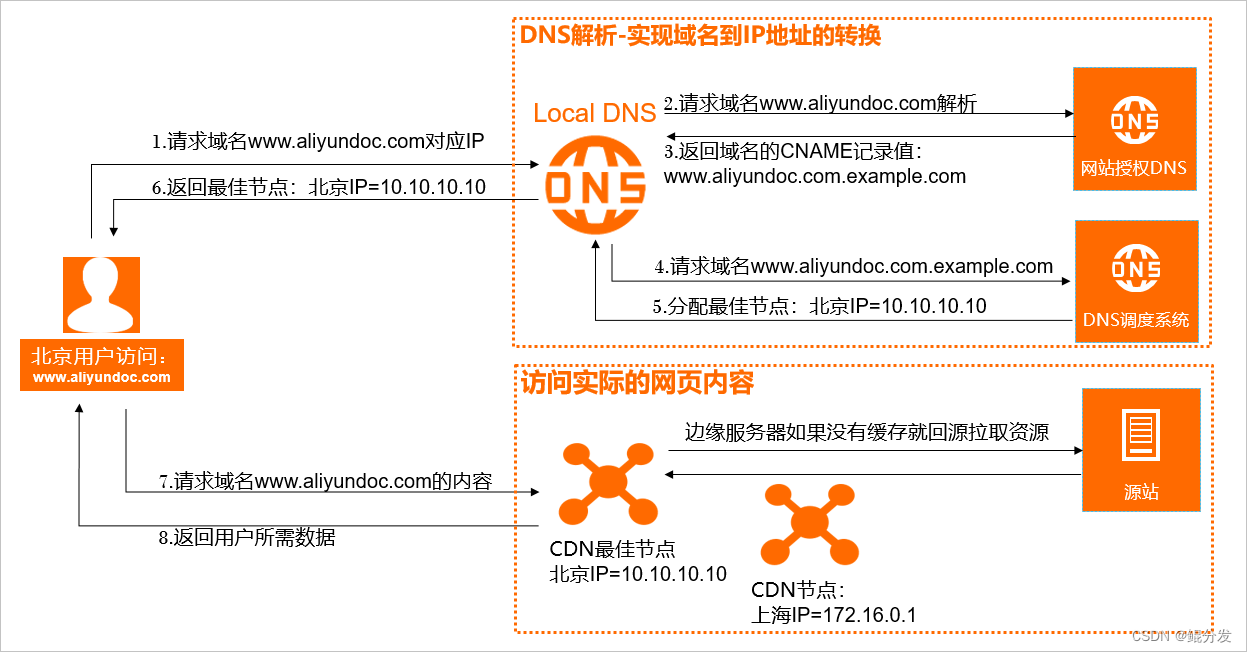
APP分发-CDN加速原理
摘要 CDN的全称是(Content Delivery Network),即内容分发网络。其目的是通过在现有的Internet中增加一层新的CACHE(缓存)层,将网站的内容发布到最接近用户的网络”边缘“的节点,使用户可以就近取得所需的内容,提高用户访问网站的…...

【Java 进阶篇】Java Request 继承体系详解
在Java编程中,Request(请求)是一个常见的概念,特别是在Web开发中。Request通常用于获取来自客户端的信息,以便服务器能够根据客户端的需求提供相应的响应。在Java中,Request通常涉及到一系列类和接口&#…...
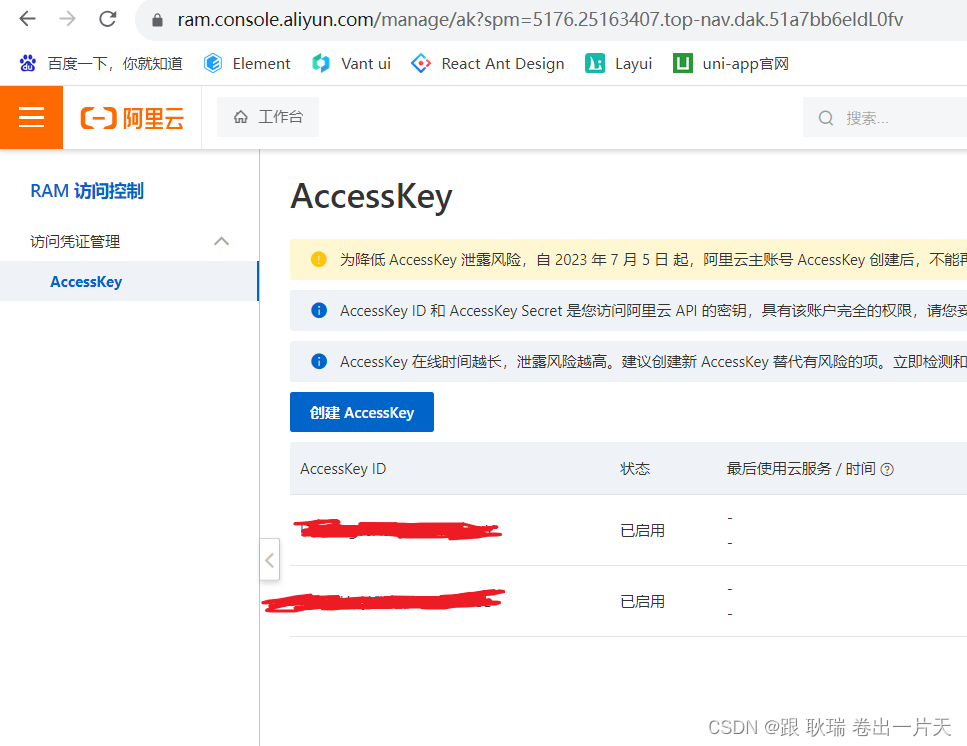
通过阿里云创建accessKeyId和accessKeySecret
我们想实现服务端向个人发送短信验证码 需要通过accessKeyId和accessKeySecret 这里可以白嫖阿里云的 这里 我们先访问阿里云官网 阿里云地址 进入后搜索并进入短信服务 如果没登录 就 登录一下先 然后在搜索框搜索短信服务 点击进入 因为我也是第一次操作 我们一起点免费开…...

decapoda-research/llama-7b-hf 的踩坑记录
使用transformers加载decapoda-research/llama-7b-hf的踩坑记录。 ValueError: Tokenizer class LLaMATokenizer does not exist or is not currently imported. 解决办法: https://github.com/huggingface/transformers/issues/22222 将tokenizer_config.json中LLa…...
计算机操作系统重点概念整理-第六章 输入输出I/O管理【期末复习|考研复习】
第六章 输入输出I/O管理【期末复习|考研复习】 计算机操作系统系列文章传送门: 第一章 计算机系统概述 第二章 进程管理 第三章 进程同步 第四章 内存管理 第五章 文件管理 第六章 输出输出I/O管理 文章目录 第六章 输入输出I/O管理【期末复习|考研复习】前言六、输…...

uniapp开发小程序—picker结合后台数据实现二级联动的选择
一、效果图 二、完整代码 <template><view><picker mode"multiSelector" change"bindMultiPickerChange" columnchange"bindMultiPickerColumnChange":value"multiIndex" :range"multiArray"><view c…...
3D聚焦特效,自定义导航按钮等)
React Swiper.js使用(详细版)3D聚焦特效,自定义导航按钮等
共用代码 import swiper/css import swiper/css/navigation import swiper/css/paginationimport { Navigation, Pagination, Scrollbar, A11y, Autoplay, EffectCreative } from swiper/modules;import { Swiper, SwiperSlide, } from swiper/react; 普通版本 重点ÿ…...

FPGA设计流程全解析:从HDL代码到比特流生成的ISE实战指南
1. 项目概述:从零到一理解FPGA设计核心流程如果你刚接触FPGA,面对一堆开发板、软件和概念,可能会觉得无从下手。我刚开始学的时候也一样,总觉得这东西门槛高,逻辑复杂。但后来我发现,只要把设计流程这条主线…...

基于Docker与MCP协议构建AI智能体安全扩展工具箱
1. 项目概述:一个为AI应用量身打造的“服务管家”最近在折腾AI应用开发,特别是那些基于大语言模型(LLM)的智能体(Agent)时,我遇到了一个挺普遍但很棘手的问题:我的AI助手能力很强&am…...

书匠策AI官网www.shujiangce.com:期刊论文从“渡劫“到“躺赢“,中间只差这一个工具
家人们,今天不讲课,今天带你们"开箱"一个我私藏很久的论文神器。 先说结论——书匠策AI( 官网直达:www.shujiangce.com) 的期刊论文功能,是我今年用过最"懂科研人"的AI工具ÿ…...

告别电脑“飞机起飞“噪音:FanControl风扇控制终极指南
告别电脑"飞机起飞"噪音:FanControl风扇控制终极指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Tr…...

LTC3305铅酸电池平衡器与PTC限流方案设计
1. LTC3305铅酸电池平衡器工作原理 LTC3305是Linear Technology(现属ADI)推出的一款专用于铅酸电池组的主动平衡控制器。其核心功能是通过一个辅助电池(AUX)在串联电池组间进行电荷转移,实现电压均衡。这种架构特别适合…...

TI毫米波雷达IWR/AWR1642 L3 RAM内存优化实战:从原理到配置
1. 项目概述:为何要动L3 RAM这块“蛋糕”?如果你正在基于TI的IWR1642或AWR1642毫米波雷达芯片进行开发,尤其是当你的应用代码量越来越大,或者数据处理任务越来越重时,你可能会遇到一个瓶颈:内存不够用了。不…...

基于ChatGPT的Twitter机器人开发实战:从架构设计到部署优化
1. 项目概述与核心价值最近在社交媒体上,尤其是技术社区,经常能看到一些“智能”的推特机器人账号。它们不仅能自动回复评论,还能根据上下文进行看似有逻辑的对话,甚至参与话题讨论。这背后,往往就是像transitive-bull…...

5分钟掌握百度网盘高速下载神器:完全免费的开源解析工具终极指南
5分钟掌握百度网盘高速下载神器:完全免费的开源解析工具终极指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘非会员下载速度只有几十KB而烦恼吗…...
)
保姆级教程:在i.MX6ULL开发板上用LVGL v8.3.11跑个炫酷UI(附触屏配置)
嵌入式Linux系统LVGL图形库移植实战指南:从零构建炫酷UI界面 在嵌入式系统开发中,图形用户界面(GUI)的实现一直是开发者面临的挑战之一。传统解决方案要么过于笨重,要么功能简陋,直到LVGL的出现改变了这一局面。这款轻量级开源图形…...

ncmdump终极解决方案:解锁网易云音乐NCM格式的完整指南
ncmdump终极解决方案:解锁网易云音乐NCM格式的完整指南 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的NCM加密文件无法在其他设备播放而烦恼吗?ncmdump工具使用为你提供了完美的NCM格…...