探索控制领域:从电视遥控器到自动驾驶【基础概念理解、应用实例】
当谈到控制学和控制系统时,你可能会联想到电视遥控器、自动驾驶汽车、飞机自动驾驶系统以及许多其他自动化系统。但控制学是一个更广泛的学科,它涵盖了各种领域,从工程到生物学,从经济学到环境科学。让我们深入了解控制学的基本概念以及它在各个领域的应用。
什么是控制学,它涉及哪些方面?
控制学的定义:
控制学是一门研究如何设计、分析和优化系统以实现所期望性能的学科。这些系统可以是物理系统(例如机械系统、电气系统、化学过程等),也可以是抽象系统(例如经济系统、生态系统、计算机系统等)。控制学的目标是开发控制策略和方法,使系统保持在所期望的状态,或者将其从当前状态引导到期望的状态。
控制学主要涉及以下几个方面:
-
目标设置: 控制学首先要确定你想要系统做什么,就像你通过遥控器选择想要的电视频道一样。这是控制的起点,你需要明确系统的目标和性能指标。
-
传感器: 这是控制中的眼睛和耳朵,它们帮助我们了解系统的当前状态,例如温度传感器告诉我们房间有多热。传感器用于
监测系统的反馈信息,这是控制中非常重要的一环。 -
处理器: 这是控制中的大脑,它根据传感器提供的信息决定采取什么行动,就像你的大脑决定是否要打开空调以降低温度。处理器包括控制算法和决策规则。
-
执行器: 这是控制中的手,它们根据处理器的指令执行动作,例如控制器告诉电视打开或关闭。执行器可以是电动机、阀门、马达等物理设备。
-
反馈: 控制学还包括不断检查系统的表现,并根据需要进行微调,就像你可能需要不断调整电视音量以确保音量合适一样。反馈是指系统的实际输出信息,它用于与期望输出进行比较,以便调整控制策略。
控制学的核心思想是通过监测系统的状态、比较实际状态与期望状态,然后采取控制措施来使它们尽量保持一致。控制系统通常基于反馈信息或预测模型来做出决策,以实现各种目标,如稳定性、性能和安全性。
在接下来的部分,我们将更深入地探讨控制系统的基本原理和应用。
控制系统的基本原理
控制系统的基本原理涉及到几个关键概念,包括反馈控制和前馈控制:
反馈控制:
反馈控制类似于你在开车时用方向盘调整车的方向。在控制系统中,我们使用 传感器 来测量系统的当前状态,然后将这些信息反馈给控制器。控制器 比较当前状态与我们想要的状态,然后采取措施来使它们保持一致。如果系统偏离了目标,反馈控制会不断调整操作,就像你不断转动方向盘以保持车在正确的道路上。
前馈控制:
前馈控制是一种预测性的控制方式,就像你知道在前面有一条坑洞,所以提前减速一样。前馈控制通过预测系统的行为并提前采取措施来避免偏离目标。它不仅依赖于反馈信息,还考虑系统的特性和环境因素,以尽量减小误差。
- 反馈控制是根据
实际观测进行调整 - 前馈控制是根据
预测进行调整。
这些原理在各种领域的自动化和工程应用中发挥着关键作用,以确保系统的稳定性、性能和安全性。
开环控制和闭环控制的区别
在控制学中,有两种主要类型的控制方法,即开环控制和闭环控制:
1. 开环控制:
-
定义: 开环控制是一种控制系统,其中控制器根据预定的输入来操作系统,而
无需监测系统的实际输出或反馈信息。 -
工作原理: 在开环控制中,系统的操作不依赖于实时反馈。控制器会发送指令,系统按照这些指令执行。然而,开环控制不会调整操作以应对外部扰动或系统内部变化,因此可能无法保证稳定性和准确性。
-
示例: 一个简单的示例是洗衣机的程序。你选择洗衣机的洗涤模式和时间,然后启动。机器会按照你选择的方式运行,而不考虑洗涤过程中的衣物状态。
2. 闭环控制:
-
定义: 闭环控制是一种控制系统,其中控制器根据系统的实际输出或反馈信息来调整操作,以确保系统达到预期的状态。
-
工作原理: 在闭环控制中,控制器会不断监测系统的性能,然后根据实际输出与期望输出之间的差异来进行调整。这种反馈机制使得闭环控制能够适应外部变化和扰动,从而更稳定和精确。
-
示例: 汽车的 巡航控制系统 是一个闭环控制的例子。系统使用传感器来监测车辆与前方车辆的距离,然后自动调整加速度和刹车力以保持安全的跟车距离。这种控制系统会根据实际道路和交通情况的变化进行调整,以满足驾驶员设定的速度和距离要求。
主要区别在于开环控制不依赖于反馈信息,而闭环控制根据反馈信息进行实时调整。
闭环控制通常更适用于需要高精度和稳定性的系统,因为它可以主动纠正误差。而开环控制更适用于一些简单的系统,不需要实时调整或不容易受到外部变化的影响。
什么是PID控制,它在工程和自动化中的应用是什么?
PID控制是一种常见的控制方法,它用于调节系统以使其维持所期望的状态。PID代表比例-积分-微分,分别代表了控制器的三个主要部分。让我们深入了解PID控制的原理和应用。
PID控制的三个部分:
-
比例(P)部分: 如果房间温度偏离了目标温度,比例部分将根据偏离的程度产生一个控制输出。如果温度偏低,它会增加加热器的功率,以加热房间。如果温度偏高,它会减小加热器功率,以降低温度。这就是比例控制的作用。
-
积分(I)部分: 积分部分考虑了时间内温度的累积偏差。如果房间温度长时间低于目标温度,积分部分将逐渐增加加热器的功率,以弥补长时间的低温。这有助于避免温度长时间波动在目标值附近。
-
微分(D)部分: 微分部分关注温度的变化速度。如果温度开始迅速升高,微分部分将减小加热器的功率,以避免温度超过目标值。这有助于防止过冲。
- P(比例)部分负责根据当前偏离情况调整加热器的功率。
- I(积分)部分负责处理长时间的偏差。
- D(微分)部分负责处理温度变化的速度。
它们一起工作,以确保温度尽量稳定地维持在目标值附近,而不出现大的波动或过冲。
应用示例:温度控制
PID控制在工程和自动化领域有广泛的应用。一个常见的应用示例是温度控制,如在加热系统中。PID控制可以确保加热器根据实际温度与目标温度之间的差异来自动调整加热功率,以使温度稳定在期望的范围内。这在烤箱、恒温房间、冷却系统等多种情况下都有用武之地。
除了温度控制,PID控制还广泛应用于自动驾驶汽车、机器人、化工过程、电机控制、水处理系统、飞机飞行控制等各种领域。它是一种灵活、通用的控制方法,可以根据不同应用的需求进行调整和优化。
控制系统如何处理不确定性和噪声?
在自动化和工程领域,控制系统必须能够处理不确定性和噪声,以确保系统的性能和稳定性。以下是一些常见的方法和策略,用于处理不确定性和噪声:
1. 鲁棒性控制:
-
原理: 鲁棒性控制是一种设计控制器的方法,可以处理系统参数不确定性或外部扰动。它考虑到系统模型不是完美的,因此控制器被设计成具有某种程度的容忍度,以应对系统变化。
-
应用示例: 在自动驾驶中,道路和交通条件可能会不断变化,而车辆参数也可能有轻微的变化。鲁棒性控制可确保自动驾驶车辆在不确定的环境中能够稳定和安全地行驶。
2. 滤波器:
-
原理: 滤波器用于去除传感器数据中的噪声,以提高数据的准确性。一种常见的滤波器是卡尔曼滤波器,它使用历史测量数据和系统模型来估计最可能的状态,并减小测量误差的影响。
-
应用示例: 自动驾驶车辆使用传感器(如激光雷达和摄像头)来感知周围环境。这些传感器数据可能受到噪声的影响,
卡尔曼滤波器可以用来减小噪声,提高环境感知的准确性。
3. 反馈控制:
-
原理: 反馈控制系统不断监测车辆状态,然后根据实际状态与期望状态之间的差异来调整车辆的操作。这使得车辆可以实时纠正轨迹偏离和保持安全跟车距离。
-
应用示例: 在自动驾驶中,反馈控制用于实时调整车辆的速度、转向和刹车,以确保它们按照预定路径行驶,同时保持与其他车辆的安全距离。
4. 饱和控制:
-
原理: 饱和控制是一种防止系统操作超出可接受范围的方法。它确保控制输出保持在可控范围内,防止系统过载或不稳定。
-
应用示例: 在自动驾驶中,饱和控制可以用来确保车辆的速度和转向角不会超出安全范围,以防止事故或失控情况的发生。
5. 自适应控制:
-
原理: 自适应控制是一种能够根据系统的动态特性调整控制器参数的方法。它可以应对系统参数随时间变化的情况。
-
应用示例: 在自动驾驶中,车辆可能会遇到不同的路况和天气条件,自适应控制可以根据这些变化来调整控制器参数,以确保车辆的性能和安全性。
6. 系统建模:
-
原理: 在系统建模中,开发者建立了一个数学模型来描述车辆的动态行为。这个模型可以用来预测和控制车辆的行为。
-
应用示例: 在自动驾驶中,系统建模可用于预测车辆在不同驾驶情况下的响应,从而优化控制算法,以实现安全、舒适的驾驶体验。
这些方法和策略可以单独或组合使用,根据具体的应用和系统需求来处理不确定性和噪声,以确保控制系统的性能和稳定性。
MPC的原理和应用是什么?
模型预测控制(Model Predictive Control,MPC) 是一种先进的控制策略,它广泛应用于自动化系统中,以实现高性能和精确的控制。MPC的原理和应用如下:
原理:
MPC的核心思想是在每个控制周期内使用系统模型来预测未来一段时间内的系统响应,并选择当前控制输入以最大程度地满足性能指标。具体来说,MPC执行以下步骤:
-
系统建模: 首先,系统的动态行为被建模成一个数学模型,通常是差分方程或状态空间方程。这个模型用于描述系统的状态变化和响应。
-
性能指标定义: 确定性能指标,即所期望的系统行为。这可以包括最小化误差、最大化效率、满足约束条件等。
-
未来预测: 在每个控制周期内,MPC使用系统模型来预测未来一段时间内的系统状态和输出。这个预测可以考虑不同的控制输入,以便选择最佳的控制策略。
-
优化问题求解: 基于预测,MPC解决一个优化问题,以找到当前控制输入,以最大程度地满足性能指标。这可以是一个非线性优化问题,需要在每个控制周期内迭代求解。
-
实施控制输入: 一旦最佳控制输入被确定,系统实施这些输入来控制系统,然后控制周期结束。
-
重复迭代: 这个过程在每个控制周期内重复,以实现动态、自适应的控制。
应用示例:
在自动化和工程领域,MPC的应用非常广泛,包括但不限于以下方面:
-
轨迹跟踪: 在自动驾驶汽车中,MPC用于跟踪预定的车辆轨迹,确保车辆在复杂的道路条件下保持在规划的路径上。它可以根据高精度的模型和传感器数据来预测车辆轨迹并调整控制输入。
-
动态障碍物避让: 当在道路上有动态障碍物(如其他车辆)时,MPC可以用于预测它们的轨迹,并根据这些预测来规划避让策略。这允许自动驾驶车辆在遇到障碍物时进行智能避让,以确保安全通行。
-
速度和舒适性控制: MPC可用于控制车辆的速度和舒适性。它可以根据路况和车辆动力学模型来动态调整车速和转向,提供更平稳和舒适的驾驶体验。
-
能量管理: 在电动汽车中,MPC可以优化能量管理,以最大程度延长电池续航里程。它可以考虑车辆的动力需求、电池状态和路况来调整电机功率和能量回收策略。
-
车辆稳定性控制: MPC可以用于改善车辆的稳定性,尤其在极端驾驶情况下。它可以根据车辆模型和传感器数据来预测潜在的失控情况,并采取措施来维持稳定性。
总的来说,MPC在自动化中的应用可以提高控制决策的精度和效率,使自动化系统能够更好地适应不断变化的环境和系统条件。它是一种强大的控制策略,可以在实时性能和安全性之间取得平衡,从而实现可靠的自动化。
在自动化和工程领域,有哪些具体的案例或项目使用了控制理论来解决问题?
控制理论在自动化和工程领域有许多具体的应用案例和项目,以下是一些示例:
-
航空航天: 控制理论在飞行器的自动驾驶、导航和飞行姿态控制中得到广泛应用。自动驾驶飞机、导弹、卫星和空间探测器使用控制理论来保持稳定的飞行、实现精确的轨道控制和进行精确的任务执行。
-
制造业自动化: 自动化工厂和生产线使用控制理论来控制机器人、机械臂、传送带和生产过程。这有助于提高生产效率、降低生产成本和提高产品质量。
-
电力系统: 电力系统使用控制理论来监测和控制电力分配、电网频率、电力负载和电力发电。自动发电机控制、电厂调度和智能电网都依赖于控制理论来确保电力系统的稳定运行。
-
自动驾驶汽车: 自动驾驶汽车使用控制理论来实现车辆的自主导航、轨迹跟踪和障碍物避让。控制理论的应用使自动驾驶汽车能够智能地感知周围环境并做出决策。
-
医疗设备: 医疗设备,如呼吸机、心脏起搏器和手术机器人,使用控制理论来监测患者的生命体征、提供治疗和进行精确的医疗操作。
-
交通管理系统: 城市交通管理系统使用控制理论来优化信号灯控制、交通流量监测和交通规划,以减少交通拥堵、提高道路安全和改善交通效率。
-
环境控制: 温室、建筑自动化系统和能源管理系统使用控制理论来维持温度、湿度和其他环境条件,以提高农业产量、改善室内舒适度和节省能源。
-
通信系统: 通信系统使用控制理论来优化数据传输、信号处理和网络管理。这有助于确保可靠的通信、最大程度地提高网络性能和优化带宽分配。
-
水资源管理: 水资源管理系统使用控制理论来监测和控制水库、水厂和排水系统,以确保可持续的水资源供应和减少洪灾风险。
-
食品加工和制药: 食品加工和制药行业使用控制理论来控制生产过程、混合、包装和质量控制,以确保产品符合标准和法规。
这些是控制理论在自动化和工程领域的一些典型应用示例。控制理论的原理和方法为这些应用提供了有效的工具,有助于提高自动化系统的性能、可靠性和效率。
相关文章:

探索控制领域:从电视遥控器到自动驾驶【基础概念理解、应用实例】
当谈到控制学和控制系统时,你可能会联想到电视遥控器、自动驾驶汽车、飞机自动驾驶系统以及许多其他自动化系统。但控制学是一个更广泛的学科,它涵盖了各种领域,从工程到生物学,从经济学到环境科学。让我们深入了解控制学的基本概…...

在R中安装CmdStanR的步骤-R4.3.1-CmdStanR-0.6.1.900
报错未安装cmdstanr 安装包官网详细介绍: R Interface to CmdStan • cmdstanrhttps://mc-stan.org/cmdstanr/ 以下是在R中安装CmdStanR的步骤: 1. 首先,需要下载和安装C编译器 例如gcc。如果您已经安装了C编译器,则可以跳过此…...

安信可小安派AiPi 代码下载
安信可小安派AiPi 代码下载笔记记录 AiPi 代码下载(直接使用命令行操作,仅需要Type-C接口线即可) 在完成环境搭建,和代码编写前提下,使用Type-C接口线下载代码,当然可以自己使用usb-ttl串口线下载程序&am…...
level2行情数据源接入)
程序化交易(二)level2行情数据源接入
WEBSOCKET行情接入 行情在线测试 websocket行情接口 交易在线测试 在线交易接口 官方文档地址 行情交易接口用户文档 分配服务器 注意:每次分配的服务器地址会发生变化,连接服务前,请务必调用该接口获取最新的服务器地址。 获取服务器:…...

4.6 static修饰符
static是一个修饰符,用于修饰类的成员属性和成员方法,还可以编写static代码块来优化程序性能。 1. static修饰属性 在Java程序中使用static修饰属性,则该属性称为静态属性(也称全局属性),静态属性可以使用…...

C++头文件定义变量
1.在进行头文件学习时,犯了不少错误,记录一下,先贴代码. .h头文件 #ifndef MY_FIRST_H_ #define MY_FIRST_H_struct Person {std::string name;int age;char8_t gender; };//需要使用extern来声明,否则在多个文件中引入该头文件会出现重定义…...

[蓝桥杯-610]分数
题面 解答 这一题如果不知道数论结论的话,做这个题会有两种天壤之别的体验 此题包含以下两个数论知识 1. 2^02^12^2...2^(n-1)2^n-1 2. 较大的数如果比较小的数的两倍大1或者小1,则两者互质 所以答案就是2^n-1/2^(n-1) 标程1 我的初次解答 #in…...

Vue指令大全:深入探索Vue提供的强大指令功能
目录 v-bind指令 v-on指令 v-if和v-show指令 v-for指令 自定义指令 其他常用指令 总结 Vue.js是一款流行的JavaScript框架,具备丰富的指令系统。Vue指令允许开发者直接在模板中添加特殊属性,以实现DOM操作、事件绑定、样式控制等功能。在本文中&a…...

x210项目重新回顾之十七升级到linux4.19.114 +buildroot2018再讨论
代码参考https://github.com/colourfate/x210_bsp/ 他的是linux_4.10(dtb为 s5pv210-x210..dtb)我打算用linux4.19.114(dtb为 s5pv210-smdkv210.dtb) ,所以修改build.sh ------------------------------------------------------------------------------ 5 M…...

shell_56.Linux永久重定向
永久重定向 1.脚本中有大量数据需要重定向,那么逐条重定向所有的 echo 语句会很烦琐。 这时可以用 exec 命令,它会告诉 shell 在脚本执行期间重定向某个特定文件描述符: $ cat test10 #!/bin/bash # redirecting all output to a file ex…...
CN考研真题知识点二轮归纳(1)
本轮开始更新真题中涉及过的知识点,总共不到20年的真题,大致会出5-10期,尽可能详细的讲解并罗列不重复的知识点~ 目录 1.三类IP地址网络号的取值范围 2.Socket的内容 3.邮件系统中向服务器获取邮件所用到的协议 4.RIP 5.DNS 6.CSMA/CD…...
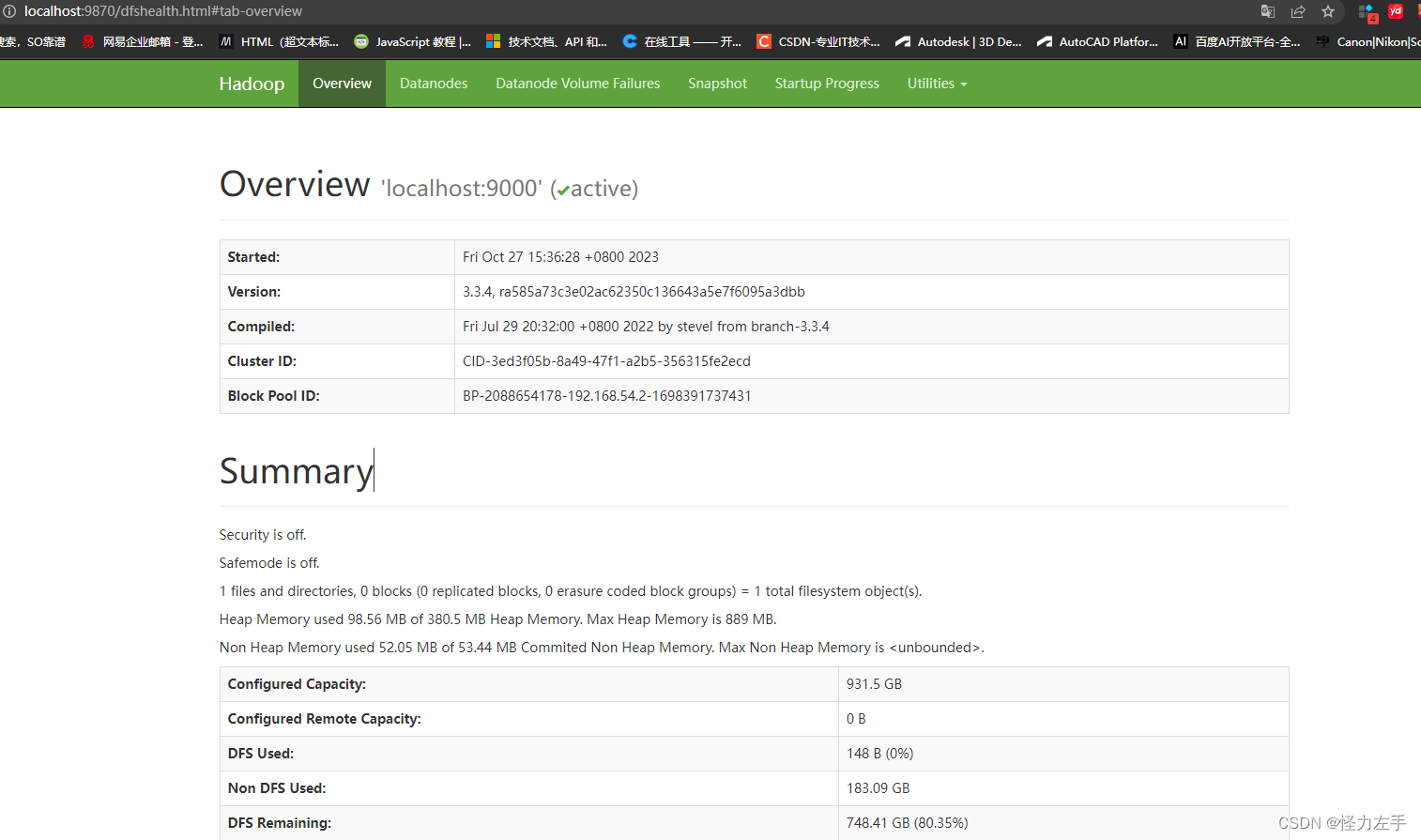
hadoop使用简介
git clone hadoop源码地址:https://gitee.com/CHNnoodle/hadoop.git git clone错误: Filename too long错误,使用git config --global core.longpaths true git clone https://gitee.com/CHNnoodle/hadoop.git -b rel/release-3.2.2 拉取指定…...

WebSocketClient objects are not reuseable
好久没写东西,夜深了来冒个泡,先啰嗦几句。今天测试 Android App 的时候,发现推到后台不到一分钟再唤醒直接闪退,初次以为网络和GPS信号弱导致的(当时是在地铁上进行的测试),之后在网络与GPS 信…...

分享54个ASP.NET源码总有一个是你想要的
分享54个ASP.NET源码总有一个是你想要的 链接:https://pan.baidu.com/s/1khPzxtOFP0wUHpg7TBDitg?pwd8888 提取码:8888 项目名称 (ASP.Net)基于三层架构的企业信息管理系统 asp .net mvc编写的房产管理系统 asp.net core mvc 病人管理后台 asp.ne…...
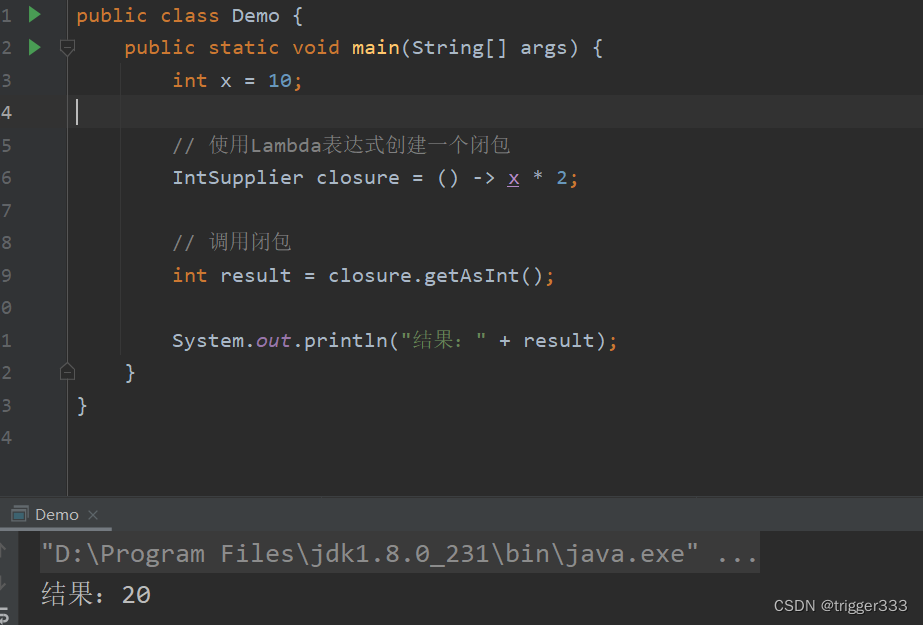
闭包通俗解释,Demo(Go Java Python)
闭包的概念 想象一下,你有一个包裹着变量的函数,就像是一个封闭的包裹。这个包裹里有一个变量,而这个函数(或包裹)本身就是一个完整的单元。当你把这个函数传递给其他地方,就像是把这个包裹传递出去。 这…...
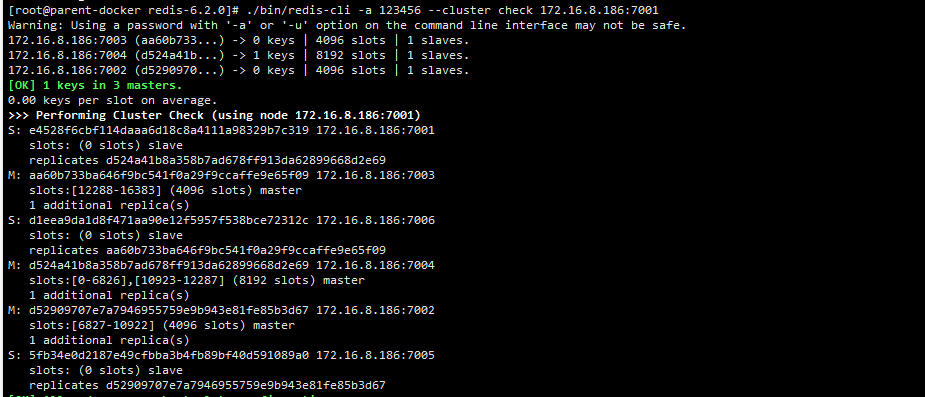
Linux部署Redis Cluster高可用集群(附带集群节点添加删除以及槽位分配操作详解)
目录 一、前言二、下载安装Redis2.1、选择需要安装的Redis版本2.2、下载并解压Redis2.3、编译安装Redis 三、部署Redis Cluster高可用集群3.1、准备配置文件3.2、启动Redis服务3.3、创建Redis集群3.4、查看集群关系3.5、连接集群Redis进行数据读写以及重定向测试3.6、故障转移和…...

【PWN · heap | Off-By-One】Asis CTF 2016 b00ks
萌新进度太慢了,才真正开始heap,还是从简单的Off-By-One开始吧 前言 步入堆的学习。堆的知识复杂而多,于是想着由wiki从简单部分逐个啃。 b00ks是经典的堆上off-by-one漏洞题目。刚开始看很懵(因为确实连堆的管理机制都没有完全…...

C++STL---Vector、List所要掌握的基本知识
绪论 拼着一切代价,奔你的前程。 ——巴尔扎克;本章主要围绕vector和list的使用,以及容器底层迭代器失效问题,同时会有对原码的分析和模拟实现其底层类函数。话不多说安全带系好,发车啦(建议电脑…...
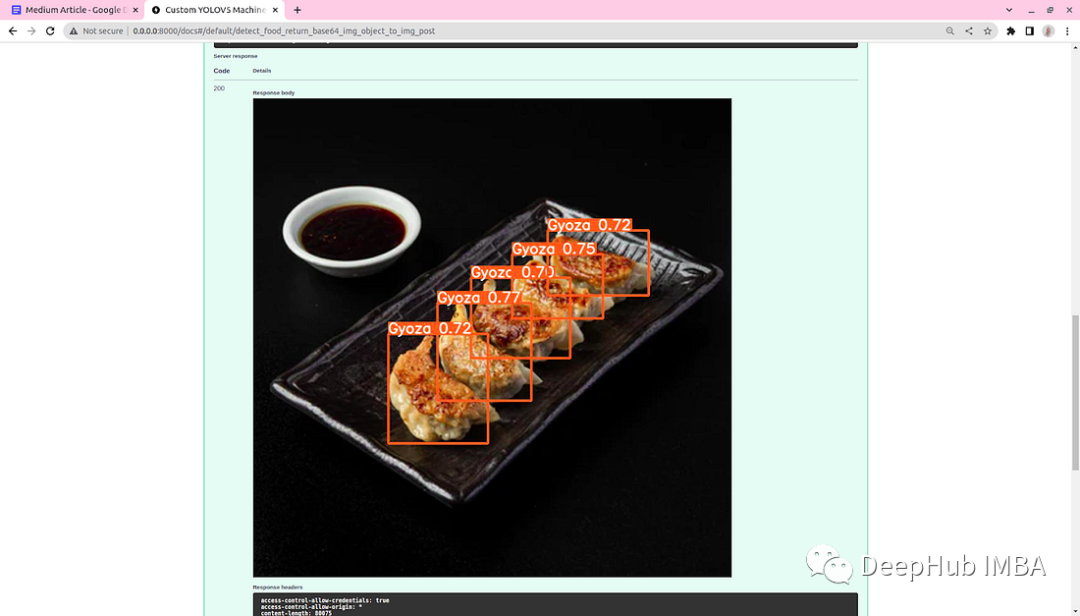
使用FastAPI部署Ultralytics YOLOv5模型
YOLO是You Only Look Once(你只看一次)的缩写,它具有识别图像中的物体的非凡能力,在日常应用中会经常被使用。所以在本文中,我们将介绍如何使用FastAPI的集成YOLOv5,这样我们可以将YOLOv5做为API对外提供服务。 Python有几个web框…...
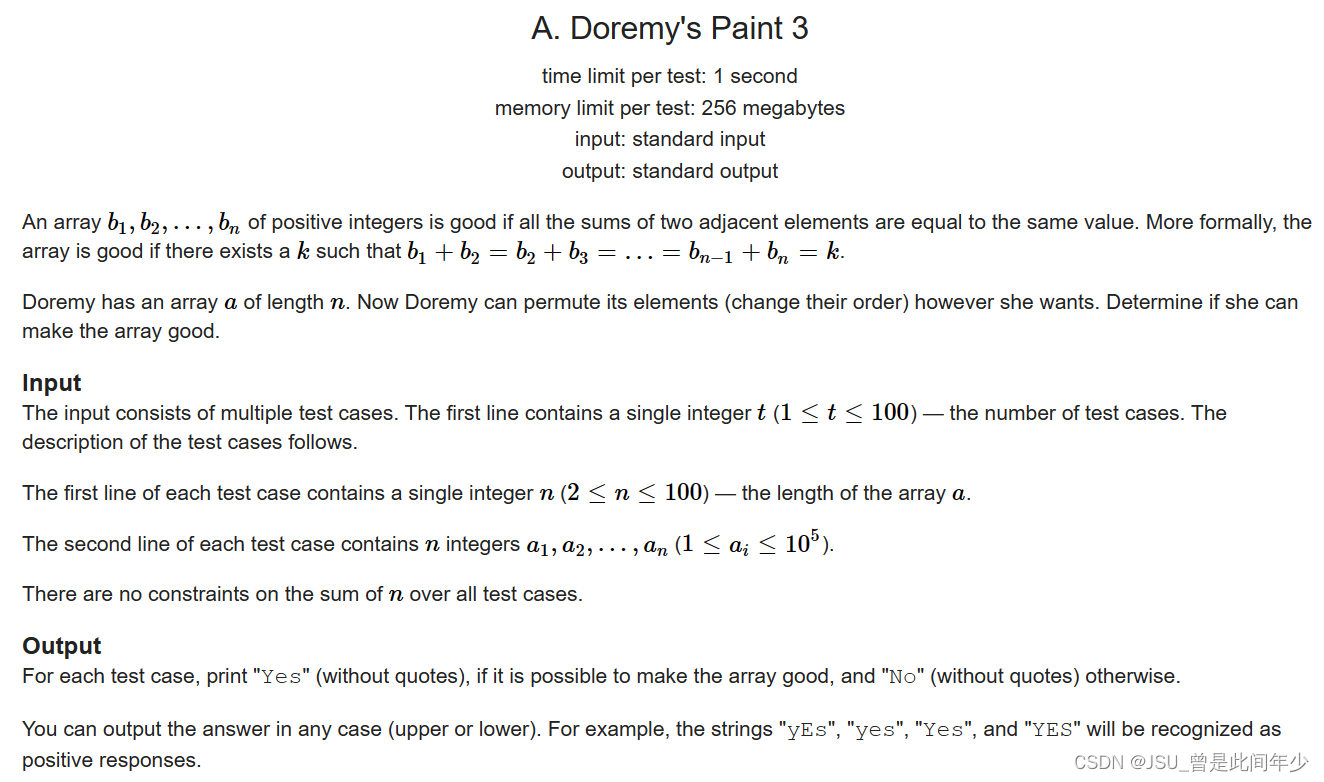
A. Doremy‘s Paint 3
今天第一次打CF,不过鼠鼠被气死了 先说说战况,今天一发没A(赛场上),生活真是无奈,废物女友真是一点用没有 心里也很烦,什么压力都自己扛着。每天想尝试改变什么,又被现实掣肘&…...

EXCEL文件展示MLP的计算过程
MLP 实现步骤(共 5 步) 步骤 1:输入层数据准备 在表格中输入两个特征值 x1、x2,作为 MLP 的输入。本次使用:x10.5,x20.8步骤 2:设置网络参数(权重 偏置) 手动设置输入层…...

终极指南:5步掌握.NET Core Mod加载器Reloaded-II的完整使用方法
终极指南:5步掌握.NET Core Mod加载器Reloaded-II的完整使用方法 【免费下载链接】Reloaded-II Universal .NET Core Powered Modding Framework for any Native Game X86, X64. 项目地址: https://gitcode.com/gh_mirrors/re/Reloaded-II 你是否厌倦了手动复…...


如何用OpCore Simplify快速配置OpenCore:面向新手的完整指南
如何用OpCore Simplify快速配置OpenCore:面向新手的完整指南 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为黑苹果复杂的OpenCore配…...

智能安全监测之高空作业安全带识别图像数据集 施工工地安全帽识别 防护服佩戴识别 反光衣图像识别数据集 穿戴佩戴服装图像第10242期
线束计算机视觉数据集简介 类别Classes (4) 类别(4) Harness 安全带 Head 头部 Helmet 头盔 Person 人线束计算机视觉数据集核心信息表信息类别具体内容数据集类别目标检测类计算机视觉数据集,包含 4 个核心类别:安全带࿰…...

如何用Happy Island Designer免费打造你的梦幻岛屿:终极完整指南
如何用Happy Island Designer免费打造你的梦幻岛屿:终极完整指南 【免费下载链接】HappyIslandDesigner "Happy Island Designer (Alpha)",是一个在线工具,它允许用户设计和定制自己的岛屿。这个工具是受游戏《动物森友会》(Animal…...

SmartBI白泽V5破局企业级AI落地难题,推动数据分析进入新阶段
BI接入AI后的企业新挑战BI接入AI之后,很多企业惊喜地发现,业务人员终于不用写SQL了,输入一句话就能查到数据。然而,真正进入严肃的经营分析场景,企业很快遭遇了新的“灵魂拷问”:老板问“为什么利润下降”&…...

液冷及前沿散热技术的理论分析:从宏观系统到芯片级散热的范式跃迁
🎓作者简介:科技自媒体优质创作者 🌐个人主页:莱歌数字-CSDN博客 211、985硕士,从业16年 从事结构设计、热设计、售前、产品设计、项目管理等工作,涉足消费电子、新能源、医疗设备、制药信息化、核工业等…...

C++图文并茂轻松进阶面向对象
一、进阶面向对象(上)面向对象的意义在于将日常生活中习惯的思维方式引入程序设计中将需求中的概念直观的映射到解决方案中以模块为中心构建可复用的软件系统提高软件产品的可维护性和可扩展性类和对象是面向对象中的两个基本概念类∶指的是一类事物&…...

Linux kernel目录、配置文件介绍
1. linux代码目录结构: kernel/ -------内核核心代码,进程调度相关模块 mm/------------内存管理子系统 fs/------------文件子系统 net/-----------不包含网络驱动的网络子系统 ipc/-----------进程间通信子系统 arch/----------体系架构相关代码 arch/…...