envi5.3处理高分二号影像数据辐射定标大气校正
目录
一、多光谱影像处理
1. 辐射定标
2.大气校正
1. 需要准备一些数据:
2.大气校正过程
3、正射校正
二、全色影像处理
1. 辐射定标
2. 正射校正
三、图像融合
1.几何配准
2.图像融合
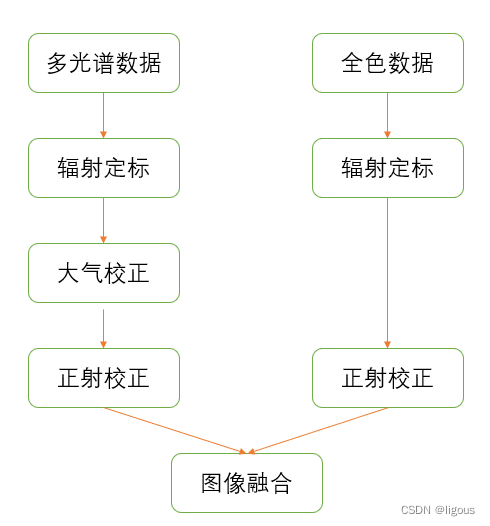
高分二号处理流程
envi5.3的安装教程:
ENVI5.3安装
安装完ENVI5.3后,还需要安装envi app store,然后在app store中安装“中国国产卫星支持工具”,这样才能在envi里导入国产卫星图像。
保姆级教程:
ENVI插件商店App Store的下载、安装、使用方法
全文根据此篇文章进行数据处理:
tm影像辐射定标_高分二号影像数据预处理及裁剪过程
本文中的操作与表述大部分来自于上述文章,处理过程作为上述文章的补充。
其他参考:
学习笔记---遥感影像辐射定标与大气校正
利用ENVI自带全球DEM数据计算区域平均高程
高分二号数据处理流程(有高分二号的数据信息)
打开.tif文件的方法(本文打开的都是.xml文件)
启动ENVI5.3,在菜单栏中,选择File > Open,弹出Open对话框,找到GF2数据⽂件夹所在位置,选中扩展名为.tiff的两个⽂件,点击打开。
GF2有多光谱和全色两个数据,MSS是多光谱的,PAN是全色的,多光谱的分辨率低(4m),全色的高(1m),需要把这两个数据融合,融合之前需要做定标等处理,获取经纬度。


一、多光谱影像处理
1. 辐射定标
以这个为例:
其他路径\2022.4.22\BaoTaQu\BaoTaQu_2022_DiZai\GF2_PMS1_E109.6_N36.2_20220214_L1A0006288992\GF2_PMS1_E109.6_N36.2_20220214_L1A0006288992-MSS1.xml
注意:路径中不要有中文,可能会报错(我的就报错了,无法生成.dat)
本文是以MSS1.xml为例,若为MSS2.xml,则和MSS相关的都将1替换成2即可
打开ENVI,使用国产卫星扩展工具打开MSS影像,启动File→Open As→China Satellites→GF2,选择MSS.xml文件打开;


在Toolbox中,Radiometric Correction→Radiometric Calibration,在File Selection中选择待处理影像,点击OK;

弹出Radiometric Calibration对话框,Calibration type确认为Radiance,单击Apply FLAASH Setting,设置输出路径与文件名(这里需要创建一个output文件夹,用于存放生成的数据文件,output/MSS1_Radiometric.dat),点击OK开始执行;

(1)辐射定标前和辐射标定后的波普廓线


(2)辐射定标前和辐射标定后的直观图像


2.大气校正
1. 需要准备一些数据:
(1)GF2的Sensor Altitude是631.000
(2)Ground Elevation平均高程需要对具体的图像进行计算。
平均高程计算过程:
File --> Open World Data --> Elevation(GMTED2010)(海拔)
得到 .jp2 图像

把要计算的.tif文件放在.jp2文件上面

可以看到tif图像在jp2图像的上方,如下图所示


选择ROI区域工具,画点(此区域用四个点即可)圈出tif图像区域。


点击右键,选择第一个选项“完成和接受多边形”

创建好区域,计算高程


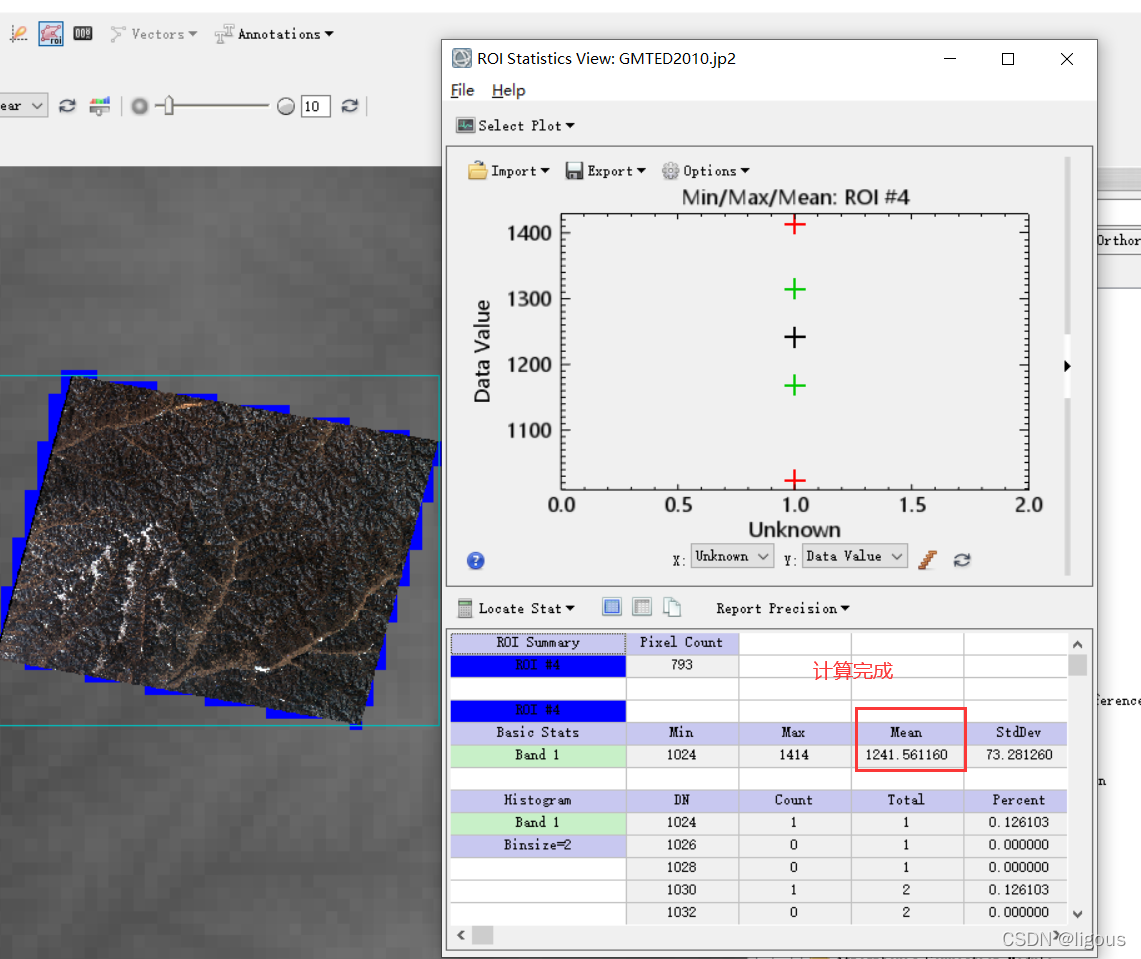
得到1241m,则Ground Elevation=1241/1000=1.241km
也可以根据百度中查到的,海拔高度860.6~1525米,平均1193米,也可以按这个来,最好是计算。
注:计算完成后,可以将 .jp2图像remove掉,不然在导入生成好的大气校正图像时会提示 “···one or more····”这样的提示,不得不创建一个新的view。
2.大气校正过程
在Toolbox中,双击Radiometric Correction→Atmospheric Correction Module→FLAASH Atmospheric Correction工具启动FLAASH模块;


参数解释:
(1) 设置输入与输出文件信息:
Input Radiance Image:输入辐射定标之后的数据,MSS1_Radiometric.dat;


Output Reflectance File:单击按钮选择反射率数据输出目录与文件名(output/MSS1_FLAASH.dat)如果只在后面的文本框中输入文件名,则保存路径将为Output Directory for FLAASH Files中的路径;

Output Directory for FLAASH Files:设置大气校正其他结果输出路径 output文件夹;

Rootname for FLAASH Files:设置大气校正其他输出结果的根文件名(这个我没设置)
(2) 设置传感器及图像信息:
ENVI5.3及以上版本能够对图像中心坐标和获取时间信息进行自动识别,所以只需要修改以下几点:
Sensor Type:传感器类型,这里选择Multispectral→UNKNOWN→MSI;
GF2的Sensor Altitude是631.000
Ground Elevation:成像区域平均高度,通过数据准备中,计算得到的Ground Elevation=1.241km
Pixel Size:4m;
(3) 大气模型和气溶胶模型:
Atmosphere model(大气模型)
根据数据经纬度与获取时间对应的大气模型进行选择:

本文实验的数据纬度为36°,日期为Feb(2月),故选取的是MLS(Mid-Latitude Summer),其他图像按照这个方法选择即可模型即可。
Aerosol Model
根据实际图像选择,本文例子为Rural
Aerosol Retrieval 气溶胶反演
第一种,选择 none。(本文选用的这种)
点击Multispectral Settings,在里面设置响应函数

Filter Function File 是GF2-PMS1的光谱响应函数gf2_pms1_mss.sli(GF2-PMS2选择gf2_pms2_mss.sli);位于ENVI安装目录:*安装目录\ENVI53\resource\filterfuncs下,选择即可。
点击Fiiter Function File --> Open --> New file




第二种,选择![]() ,需要设置Multispectral Settings--Kaufman --> Tanre Aerosol Retrieval
,需要设置Multispectral Settings--Kaufman --> Tanre Aerosol Retrieval

Advanced Settings
这里大部分都可以保持默认设置,但由于是多光谱数据,故将Modtran Resolution设置为15cm-1.

我的参数设置:

所有设置完成之后,点击Apply执行大气校正,完成后会得到反演的能见度和水汽柱含量;

得到的结果:

选择Display>Profiles>Spectral查看大气校正前后同一地物波谱曲线变化。
气溶胶反演选择的第一种,None,得到的 大气校正前后对比图,图片颜色有些许变化。


这个是刚刚大气校正后得到的:

3、正射校正
点击File→Open打开大气校正后(或者原始的多光谱)的影像,View Metadata查看其元数据信息,可以看到ENVI很好地识别了数据的RPC信息;

有了RPC信息之后,就可以基于这些RPC信息进行正射校正;点击Toolbox→Geometric Correction→Orthorectification→RPC Orthorectification
Workflow,打开正射校正流程化工具;

在File Selection面板中,Input File选择经过大气校正的多光谱数据(MSS1_FLAASH.dat),DEM File会默认选择全球分辨率为900米的DEM数据,我们这里保持默认(如果有更高分辨率的DEM数据,可以替换此数据),点击Next;


在RPC Refinement面板中,有四个选项卡可以选择。
如果有实测的或从其他途径获取的控制点数据,可以在该面板中进行添加,添加后在Statistics选项卡中可以看到相应的误差统计信息;
1) 切换到Advanced选项卡,修改输出像元大小Output Pixel Size为4米,重采样方法Image Resampling选择三次卷积法,其他参数保持默认;

2) 切换到Export选项卡,选择输出文件格式,设置输出路径及文件名(MSS1_FLAASH_rpcortho.dat),点击Finish;

正射校正前后对比:


二、全色影像处理
1. 辐射定标
打开ENVI,使用国产卫星扩展工具打开MSS影像,启动File→Open As→China Satellites→GF2,选择PAN.xml文件打开;

在Toolbox中,Radiometric Correction→Radiometric Calibration,在File Selection中选择待处理影像,点击OK;

Calibration Type: Reflectance,全色影像定标为大气表观反射率;
Output Interleave: BIL;
Output Data Type:Uint;
Scale Factor:10000;

output/PAN1_Radiometric.dat

注:由于多光谱FLAASH大气校正的结果为扩大了10000倍的反射率数据,为了让融合图像效果好,需要将全色数据与多光谱数据的像元值变成一致。这里使用辐射定标工具将全色数据定标为大气表观反射率,并扩大10000倍。
辐射定标前和辐射标定后的直观图像


2. 正射校正
全色数据的正射校正操作与多光谱数据的正射校正完全相同,需要提醒的地方是GF2全色数据正射校正时输出像元大小需设置为1米,以便我们下面进行图像融合。
点击Toolbox→Geometric Correction→Orthorectification→RPC Orthorectification
Workflow,打开正射校正流程化工具;
在File Selection面板中,Input File选择经过辐射定标(因为本文的全色图没有进行大气校正)的全色数据(PAN1_Radiometric.dat),DEM File会默认选择全球分辨率为900米的DEM数据,我们这里保持默认(如果有更高分辨率的DEM数据,可以替换此数据),点击Next;


1) 切换到Advanced选项卡,修改输出像元大小Output Pixel Size为1米,重采样方法Image Resampling选择三次卷积法(Cubic Convolution),其他参数保持默认;

2) 切换到Export选项卡,选择输出文件格式,设置输出路径及文件名(PAN1_Radiometric_rpcortho.dat),点击Finish;

正射校正前、后对比:


以上全色图的处理已完成。
三、图像融合
1.几何配准
(本次处理中没有进行几何配准,这部分没有处理)
图像融合之前,需要查看二者是否完全配准,如果没有完全配准,就需要对其进行配准,可以使用ENVI中的自动配准流程化工具,以全色数据为基准对多光谱数据进行配准;此工具的位置在:Toolbox > Geometric Correction > Registration > Image Registration Workflow

本次操作正射校正后的多光谱和全色数据配准的比较好(目前,大部分高分辨率数据正射校正后多光谱和全色数据配准的均比较好),所以我们这里不进行图像配准,直接进行图像融合;
2.图像融合
(1)NNDiffuse Pan Sharpening方法
点击在Toolbox→Extensions→NNDiffuse Pan Sharpening ;

Input Low Resolution Raster选择上一步正射校正后的多光谱数据;
Input High Resolution Raster选择上一步正射校正后的全色数据;
Output Raster:NNDiffusePanSharpening.dat应该是自己出来的,如需修改位置、名称可以进行修改,也可以将融合的数据改为.tiff格式的,NNDiffusePanSharpening.tiff;
其他参数保持默认;
点击OK运行;



注:NNDiffuse Pan Sharpening工具要求输入的多光谱和全色数据的空间分辨率是整数倍的(本例正射校正时分别将多光谱的全色的分辨率重采样为4米和1米,就是为了方便该工具的使用)。
浏览融合之后的影像与融合之前的多光谱影像,空间分辨率得到明显提升,颜色纹理也得到了比较好的保留。与全色融合后的光谱曲线整体升高。





对于图像变白问题,可以将背景值设置为0,有两种方式
(1)使用ENVI自带的工具
具体操作:
Toolbox > Extensions > Raster Processing Batch Tool > Data Ignore Value > Set Ignore Value[Zero]



(2)手动修改源数据
使用记事本等工具打开图像头文件,如下图所示。

在头文件中手动增加一行为data ignore value = 0(其中0为背景值,可以设置为其他值)。重新打开图像即可。
最终得到的图像保存:
此处保存的文件格式是.dat,可根据自己所需,保存成.tif或者其他格式都可以
处理过程中涉及到的文件名:
MSS1_Radiometric.dat
MSS1_FLAASH.dat
MSS1_FLAASH_rpcortho.dat
PAN1_Radiometric.dat
PAN1_Radiometric_rpcortho.dat
MSS2_Radiometric.dat
MSS2_FLAASH.dat
MSS2_FLAASH_rpcortho.dat
PAN2_Radiometric.dat
PAN2_Radiometric_rpcortho.dat
NNDiffusePanSharpening.tiff
相关文章:
envi5.3处理高分二号影像数据辐射定标大气校正
目录 一、多光谱影像处理 1. 辐射定标 2.大气校正 1. 需要准备一些数据: 2.大气校正过程 3、正射校正 二、全色影像处理 1. 辐射定标 2. 正射校正 三、图像融合 1.几何配准 2.图像融合 高分二号处理流程 envi5.3的安装教程: ENVI5.3安装 安装完ENVI5.3后࿰…...

C语言 结构体
结构体的自引用: 自引用的目的: 结构体的自引用就是指在结构体内部,包含指向自身类型结构体的指针。 像链表就会用到结构体的自引用。假如我们要创建链表 链表的没个节点都是一个结构体,它里面存放着它的数据和下个节点的地址。 假如我们用…...

frp-内网穿透部署-ubuntu22服务器-windows server-详细教程
文章目录 1.下载frp2.配置服务器2.1.配置frps.ini文件2.2.设置服务文件2.3.设置开机自启和服务操作2.4.后台验证2.5.服务器重启 3.配置本地window3.1.frpc配置3.2.添加开机计划启动3.3.控制台启动隐藏窗口 4.centos防火墙和端口3.1.开放端口3.2.查看端口 5.关闭进程5.1.杀死进程…...

MySQL内存使用的监控开关和使用查看
参考文档: https://brands.cnblogs.com/tencentcloud/p/11151 https://www.cnblogs.com/grasp/p/10306697.html MySQL如何使用内存 在MySQL中,内存占用主要包括以下几部分,全局共享的内存、线程独占的内存、内存分配器占用的内存࿰…...
数据库管理-第113期 Oracle Exadata 04-硬件选择(20231020)
数据库管理-第113期 Oracle Exadata 04-硬件选择(2023010290) 本周没写文章,主要是因为到上海参加了Oracle CAB/PAB会议,这个放在后面再讲,本期讲一讲Exadata,尤其是存储节点的硬件选择及其对应的一些通用…...
带着问题去分析:Spring Bean 生命周期 | 京东物流技术团队
1: Bean在Spring容器中是如何存储和定义的 Bean在Spring中的定义是_org.springframework.beans.factory.config.BeanDefinition_接口,BeanDefinition里面存储的就是我们编写的Java类在Spring中的元数据,包括了以下主要的元数据信息: 1&…...
tolower —— 转换为小写字母)
C语言修行之函数篇(一)tolower —— 转换为小写字母
文章目录 函数说明函数声明函数返回值函数实现函数实例 函数说明 对于大写字母,如果在当前语言环境中存在小写表示形式,则tolower()返回其小写等效物。否则,tolower()函数执行相同的任务。 函数声明 #include <ctype.h> int tolower(…...

【JavaSE专栏55】Java集合类HashTable解析
🌲Java集合类HashTable解析 🌲Java集合类HashTable解析摘要引言Hashtable是什么?Hashtable vs. HashMap:何时使用Hashtable?多线程环境:历史遗留系统:不需要进行特殊操作: Hashtable…...
Apollo上机实践:一次对自动驾驶技术的亲身体验
上机实践 概述自动驾驶通信分布式系统开发模式开发工具 自动驾驶感知传感器特性感知流程及算法部署感知模型 自动驾驶决策规划决策规划流程和算法使用 Dreamview 进行控制在环的规划调试开发规划场景和算法 福利活动 主页传送门:📀 传送 概述 Apollo 是…...

QTcpServer简单的TCP服务器连接
1、简介 简单实现控制TCP服务器获取连接的套接字。点击断开服务器即可关闭所有连接,最大连接数量为5个。 声明源文件 #include "mainwindow.h"MainWindow::MainWindow(QWidget *parent): QMainWindow(parent) {//设置固定大小setFixedSize(1024,600);b…...
LeetCode热题100——双指针
双指针 1.移动零2.盛最多水的容器3.三数之和 1.移动零 给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。 // 题解:使用双指针,其中快指针指向非零元素,慢指针指向首个零元素下…...
Ubuntu ARMv8编译Qt源码以及QtCreator
最近需要在NVIDIA小盒子上面跑一个程序,一开始想着在Ubuntu x64下交叉编译一版,后来发现libqxcb.so 这个库在configure时就会一直报错,多方查找怀疑可能是由于硬件不支持在x64环境下编译AMR架构的xcb库。 所以最后在ARM下直接编译Qt源码了&am…...

虚机Centos忘记密码如何重置
1进入开机前的页面,选中第一个,按“e”键,进入编辑模式 2找到ro crashkernel项,将ro替换成 rw initsysroot/bin/sh 3 Ctrlx mount -o remount, rw / chroot /sysroot chroot /sysroot passwd root 输入两次密码 touch /.a…...

OpenGL_Learn02
1. 监听窗口,绑定回调函数 #include <glad/glad.h> #include <GLFW/glfw3.h> #include <iostream>void framebuffer_size_callback(GLFWwindow* window, int width, int height) {glViewport(0, 0, width, height);std::cout << "变了…...
基于STC系列单片机实现外部中断0控制按键调节定时器0产生PWM(脉宽调制)的功能
#define uchar unsigned char//自定义无符号字符型为uchar #define uint unsigned int//自定义无符号整数型为uint sbit PwmOut P1^0;//位定义脉宽调制输出为单片机P1.0脚 uchar PwmTimeCount;//声明脉宽调制时间计数变量 uchar PwmDutyCycle;//声明脉宽调制占空比变量 void Ti…...

vue3中 reactive和ref的区别
在Vue 3中,reactive和ref都是用于响应式数据的API。它们的主要区别在于使用方式和返回值类型。 reactive: reactive函数用于将一个对象转换为响应式对象。它接收一个普通的JavaScript对象,并返回一个被代理的响应式对象。这意味着当响应式对…...
docker的安装部署nginx和mysql
小白自己整理,如有错误请指示! 自我理解:docker就是把应用程序所用的依赖程序,函数库等相关文件打包成镜像文件,类似系统光盘,然后可以在任意电脑上安装使用(方便运维人员部署程序)…...

测试C#调用Aplayer播放视频(1:加载Aplayer控件)
微信公众号“Dotnet跨平台”的文章《开源精品,使用 C# 开发的 KTV 点歌项目》中使用了迅雷开源APlayer播放引擎。最近在学习有哪些能拿来播放视频的组件或控件,于是准备试试,根据文章中的介绍,在迅雷APlayer播放引擎网站中下载了A…...

二叉树的遍历+二叉树的基本操作
文章目录 二叉树的操作一、 二叉树的存储1.二叉树的存储结构 二、 二叉树的基本操作1.前置创建一棵二叉树:1. 定义结点 2.简单的创建二叉树 2.二叉数的遍历1.前序遍历2.中序遍历3.后序遍历4.层序遍历 3.二叉树的操作1.获取树中节点的个数2.获取叶子节点的个数3.获取…...

Go 语言gin框架的web
节省时间与精力,更高效地打造稳定可靠的Web项目:基于Go语言和Gin框架的完善Web项目骨架。无需从零开始,直接利用这个骨架,快速搭建一个功能齐全、性能优异的Web应用。充分发挥Go语言和Gin框架的优势,轻松处理高并发、大…...

MusePublic Art Studio实际效果:UI设计稿生成中组件一致性保障
MusePublic Art Studio实际效果:UI设计稿生成中组件一致性保障 1. 引言:当AI成为你的UI设计搭档 想象一下这个场景:你正在为一个新的移动应用设计UI界面。你已经画好了登录页的草图,上面有圆角按钮、卡片式布局和一套清爽的配色…...

逆向新手也能懂:用Python脚本5分钟搞定‘长城杯’EasyRe逆向题
逆向工程零基础入门:用Python五分钟破解CTF异或加密题 第一次接触CTF逆向题时,看着满屏的汇编代码和反编译结果,我完全不知所措。直到发现有些题目其实只需要一点Python脚本就能解决——比如这道来自"长城杯"网络安全大赛的EasyRe题…...

别再硬编码了!用CRMEB标准版的可视化定时任务,5分钟搞定自动发券
告别硬编码时代:CRMEB可视化定时任务实战指南 在电商系统开发中,定时任务就像一位不知疲倦的助手,默默处理着自动发券、订单状态更新、数据清理等重复性工作。但传统开发方式往往需要开发者手动编写Crontab配置或硬编码任务逻辑,不…...

webMAN-MOD实战指南:构建PS3主机扩展服务系统
webMAN-MOD实战指南:构建PS3主机扩展服务系统 【免费下载链接】webMAN-MOD Extended services for PS3 console (web server, ftp server, netiso, ntfs, ps3mapi, etc.) 项目地址: https://gitcode.com/gh_mirrors/we/webMAN-MOD 当你在PS3主机上尝试加载网…...

想转行做产品经理?看看你身上有没有这5个“隐藏技能”
在数字经济飞速发展的当下,产品经理早已不是互联网行业的“专属岗位”,而是横跨互联网、硬件、金融、制造业等多个领域的核心角色——连接用户需求与技术实现,主导产品从创意到落地的全流程,被称为“CEO的学前班”。正因如此&…...
)
保姆级教程:在QT中配置qcustomplot实现热力图(含常见问题解决方案)
QT中qcustomplot热力图实战:从配置到交互优化的完整指南 第一次在QT项目中尝试用qcustomplot绘制热力图时,我被数据映射和实时刷新的问题困扰了整整两天。直到凌晨三点调试通过的那一刻,才真正理解这个强大可视化工具的精妙之处。本文将分享那…...

美胸-年美-造相Z-Turbo在网络安全领域的创新应用:恶意代码可视化分析
美胸-年美-造相Z-Turbo在网络安全领域的创新应用:恶意代码可视化分析 1. 当安全分析遇上图像生成:一个意想不到的跨界组合 最近在调试一个自动化威胁分析流程时,我偶然发现了一个有趣的现象:当把一段混淆后的JavaScript恶意代码…...

Llama-3.2V-11B-cot代码实例:Streamlit中图片上传与缓存机制
Llama-3.2V-11B-cot代码实例:Streamlit中图片上传与缓存机制 1. 项目概述 Llama-3.2V-11B-cot是基于Meta Llama-3.2V-11B-cot多模态大模型开发的高性能视觉推理工具,专为双卡4090环境优化。该工具通过Streamlit构建了直观易用的交互界面,特…...

OpenClaw多模态飞书助手:Qwen3-VL:30B实战指南
OpenClaw多模态飞书助手:Qwen3-VL:30B实战指南 1. 为什么我们需要多模态飞书助手? 去年夏天,我负责一个跨部门协作项目时,每天要处理上百条飞书消息和几十份文档。最头疼的是同事发来的截图——有时是数据图表,有时是…...
)
从Excel到Python:数据分析师必学的对数坐标绘制技巧(含Seaborn美化)
从Excel到Python:数据分析师必学的对数坐标绘制技巧(含Seaborn美化) 当市场报告中的用户增长曲线从缓慢爬升突然变成陡峭上升,或是竞品分析中的订单量横跨三个数量级时,Excel的默认线性坐标往往会让图表失去可读性。对…...