【移远QuecPython】EC800M物联网开发板的内置GNSS定位获取(北斗、GPS和GNSS)
【移远QuecPython】EC800M物联网开发板的内置GNSS定位获取(北斗、GPS和GNSS)
测试视频(其中的恶性BUG会在下一篇文章阐述):
【移远QuecPython】EC800M物联网开发板的内置GNSS定位的恶性BUG(目前没有完全的解决方案)
文章目录
- GNSS初始化
- GNSS读取
- 测试效果
- 附录:列表的赋值类型和py打包
- 列表赋值
- BUG复现
- 代码改进
- 优化
- 总结
- py打包
GNSS初始化
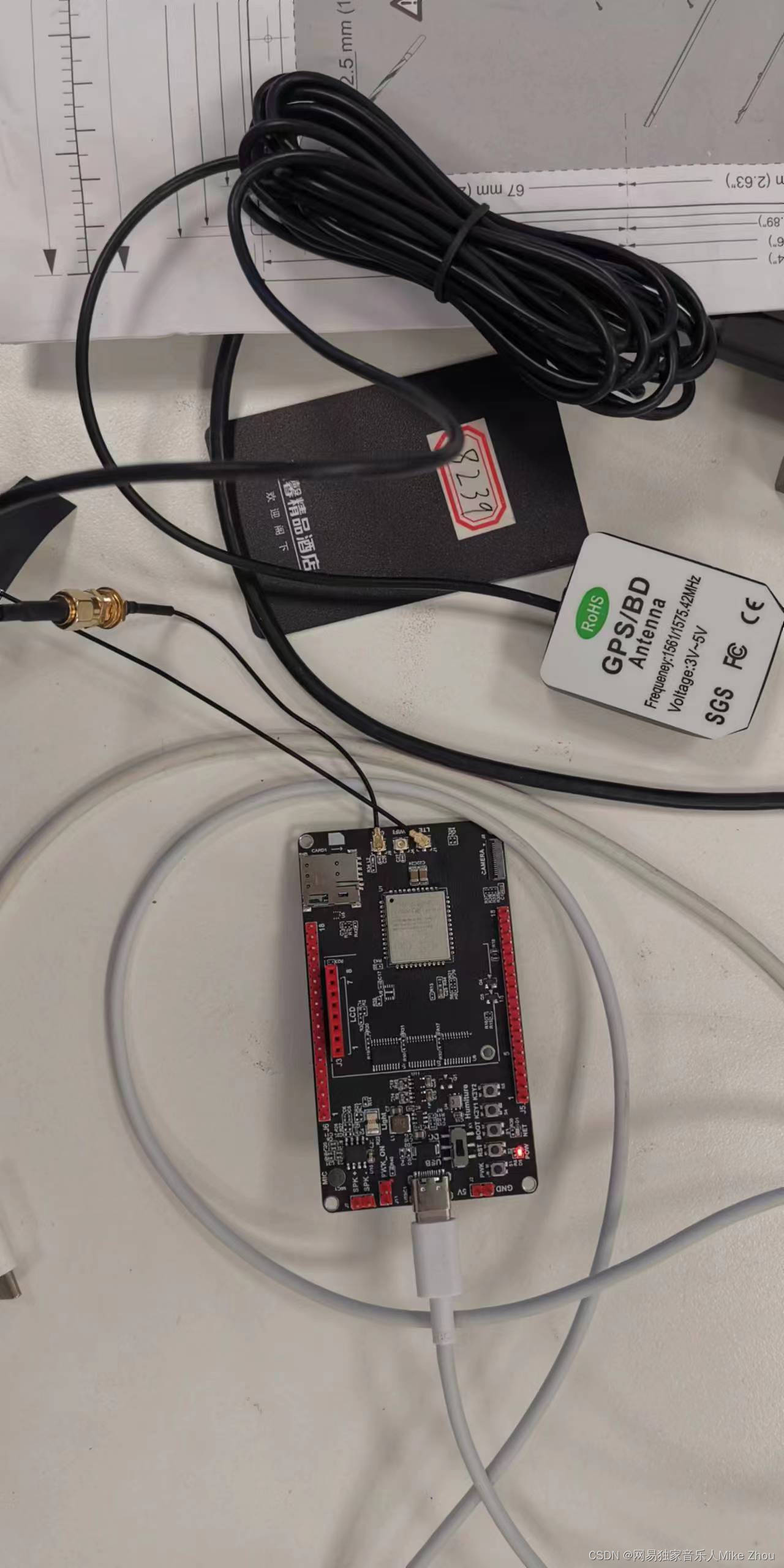
内置的GNSS就是通过插入的GPS天线直接定位
def GNSS_Init():ret = quecgnss.init()if ret == 0:print('GNSS init ok.')else:print('GNSS init failed.')return -1ret = quecgnss.get_state()if ret == 2:print(True)
通过函数quecgnss.init()可以进行初始化和上电
这里上电以后 大约3秒就可以读数据 但是读到的数据不是有效数据
需要过大约30秒才能得到有效数据
同时可以获取到工作状态
quecgnss.get_state()
返回值描述
返回值 类型 说明
0 int GNSS模块处于关闭状态
1 int GNSS模块固件升级中
2 int GNSS模块定位中,这种模式下即可开始读取GNSS定位数据,定位数据是否有效需要用户获取到定位数据后,解析对应语句来判断,比如判断GNRMC语句的status是 A 还是 V,A 表示定位有效,V 表示定位无效。
上电后 不需要调用quecgnss.gnssEnable(opt)函数来开启
另外 如果手动关闭以后 再次打开也需要等待30s才能读到有效数据 所以不要频繁打开、关闭
GNSS读取
使用函数quecgnss.read(size)直接读取定位坐标信息
坐标格式为NMEA-0183协议
比如:
$GNRMC,032220.291,V,,,,,0.00,0.00,140716,,,N*5D
$GNVTG,0.00,T,,M,0.00,N,0.00,K,N*2C
$GNGGA,032220.291,,,,,0,0,,,M,,M,,*5D
$GPGSA,A,1,,,,,,,,,,,,,,,*1E
$BDGSA,A,1,,,,,,,,,,,,,,,*0F
$GPGSV,2,1,07,23,,,31,08,,,49,30,,,33,16,,,45*7E
$GPGSV,2,2,07,07,,,44,27,,,49,26,,,43*72
$BDGSV,1,1,03,10,,,47,04,,,40,07,,,48*62
$GNGSA,A,3,31,32,3,16,22,25,26,,,,,,1.837,1.120,1.456*11
$GNGSA,A,3,163,166,167,169,170,,,,,,,,1.837,1.120,1.456*18
$GPGSV,2,1,8,3,23,302,27,16,32,220,26,22,73,101,27,25,16,43,27*45
$GPGSV,2,2,8,26,70,237,28,31,59,13,33,32,54,128,28,4,5,,24*44
$BDGSV,2,1,8,163,51,192,33,166,71,11,35,167,52,198,33,169,59,334,34*6E
$BDGSV,2,2,8,170,40,205,32,161,5,,33,164,5,,28,165,5,,30*5F
$GNRMC,022507.000,A,3149.324768,N,11706.922344,E,0.000,261.541,180222,,E,A*31
$GNGGA,022507.000,3149.324768,N,11706.922344,E,1,12,1.120,-8.794,M,0,M,,*48
$GNGLL,3149.324768,N,11706.922344,E,022507.000,A,A*4D
$GNGSA,A,3,31,32,3,16,22,25,26,,,,,,1.837,1.120,1.455*12
$GNGSA,A,3,163,166,167,169,170,,,,,,,,1.837,1.120,1.455*1B
$GPGSV,2,1,8,3,23,302,26,16,32,220,26,22,73,101,27,25,16,43,26*45
$GPGSV,2,2,8,26,70,237,28,31,59,13,32,32,54,128,28,4,5,,24*45
$BDGSV,2,1,8,163,51,192,24,166,71,11,35,167,52,198,33,169,59,334,34*68
$BDGSV,2,2,8,170,40,205,31,161,5,,33,164,5,,28,165,5,,30*5C
$GNRMC,022508.000,A,3149.324754,N,11706.922338,E,0.002,261.541,180222,,E,A*38
$GNGGA,022508.000,3149.324754,N,11706.922338,E,1,12,1.120,-8.750,M,0,M,,*4B
等等
其中:
序号 命令 说明
1 $*GGA 卫星定位信息
2 $*GSA 卫星PRN数据
3 $*GSV 可视卫星信息
4 $*RMC 推荐定位信息
5 $*VTG 地面速度信息
6 $*GLL 地理定位信息
7 $*GPZDA UTC时间和日期
GPGSV:可见卫星信息
GPGLL:地理定位信息
GPRMC:推荐最小定位信息
GPVTG:地面速度信息
GPGGA:GPS定位信息
GPGSA:当前卫星信息
如:
$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*hh #最小定位信息<1> UTC 时间,hhmmss(时分秒)格式<2> 定位状态,A=有效定位,V=无效定位<3>纬度ddmm.mmmm(度分)格式(前面的0也将被传输)<4> 纬度半球N(北半球)或S(南半球)<5>经度dddmm.mmmm(度分)格式(前面的0也将被传输)<6> 经度半球E(东经)或W(西经)<7>地面速率(000.0~999.9节,前面的0也将被传输)<8>地面航向(000.0~359.9度,以真北为参考基准,前面的0也将被传输)<9> UTC 日期,ddmmyy(日月年)格式<10>磁偏角(000.0~180.0度,前面的0也将被传输)<11> 磁偏角方向,E(东)或W(西)<12>模式指示(仅NMEA01833.00版本输出,A=自主定位,D=差分,E=估算,N=数据无效)
具体就需要大家自己根据需求去获取了
读取函数:
def GNSS_Read():data = quecgnss.read(1024)data_gnss = data[1].decode()if len(data_gnss)==0:print("None Data")else:print("Get Data")#print(data_gnss)data1 = re.search("GNRMC(.+?)M", data_gnss)deta2 = re.search("GPGSV(.+?)M", data_gnss)deta3 = re.search("BDGSV(.+?)M", data_gnss)data4 = re.search("GNGGA(.+?)M", data_gnss)try:if data1.group(0).split(",")[2] == 'A': print("Available Data") li=[data4.group(0).split(",")[2],data4.group(0).split(",")[3],data4.group(0).split(",")[4],data4.group(0).split(",")[5]]print(li)lat0=int(int(float(li[0]))/100)lat1=int(int(float(li[0]))%100)lat2=int(li[0].split(".")[1])lon0=int(int(float(li[2]))/100)lon1=int(int(float(li[2]))%100)lon2=int(li[2].split(".")[1])lat_d=str(lat0)lat_m=str(lat1)+"."+str(lat2)lon_d=str(lon0)lon_m=str(lon1)+"."+str(lon2)return lat_d,lat_m,li[1],lon_d,lon_m,li[3]except:pass
这里用到了正则表达式来搜素相关关键字
我最后用到的信息是GNGGA信息
然后根据格式来进行转换 得到一个列表定位信息
测试效果
调用时 直接死循环调用即可
while True:#date=time.localtime()#print("{0}-{1}-{2} {3}:{4}:{5}".format(date[0],date[1],date[2],date[3],date[4],date[5]))print(i) result = GNSS_Read()if result:print(result)huart2.write(str(result))i=i+1time.sleep(1)pass

完整代码:
# -*- coding: utf-8 -*-from machine import Pin
from machine import UART
from machine import WDT
import utime as time
import uos as os
import quecgnss
import ure as renet_led = Pin(Pin.GPIO36, Pin.OUT,Pin.PULL_PD,0)
huart2 = UART(UART.UART2, 115200, 8, 0, 1, 0)
def led_warning_task():for i in range(5):net_led.value(1)time.sleep(0.5)net_led.value(0)time.sleep(0.5)def UART2_Read_Callback(para): if para[0] == 0:if para[1]==2:data=huart2.read(para[2])str=data.decode()print(str)def UART2_Init():huart2.set_callback(UART2_Read_Callback)def GNSS_Read():data = quecgnss.read(1024)data_gnss = data[1].decode()if len(data_gnss)==0:print("None Data")else:print("Get Data")#print(data_gnss)data1 = re.search("GNRMC(.+?)M", data_gnss)deta2 = re.search("GPGSV(.+?)M", data_gnss)deta3 = re.search("BDGSV(.+?)M", data_gnss)data4 = re.search("GNGGA(.+?)M", data_gnss)try:if data1.group(0).split(",")[2] == 'A': print("Available Data") li=[data4.group(0).split(",")[2],data4.group(0).split(",")[3],data4.group(0).split(",")[4],data4.group(0).split(",")[5]]print(li)lat0=int(int(float(li[0]))/100)lat1=int(int(float(li[0]))%100)lat2=int(li[0].split(".")[1])lon0=int(int(float(li[2]))/100)lon1=int(int(float(li[2]))%100)lon2=int(li[2].split(".")[1])lat_d=str(lat0)lat_m=str(lat1)+"."+str(lat2)lon_d=str(lon0)lon_m=str(lon1)+"."+str(lon2)return lat_d,lat_m,li[1],lon_d,lon_m,li[3]except:passdef GNSS_Init():ret = quecgnss.init()if ret == 0:print('GNSS init ok.')else:print('GNSS init failed.')return -1ret = quecgnss.get_state()if ret == 2:print(True)def Set_spk():while True:spk.value(1)spk.value(0)
def main():time.sleep(1)print('system info:{}'.format(os.uname()))Set_spk()UART2_Init()GNSS_Init()i=0while True:#date=time.localtime()#print("{0}-{1}-{2} {3}:{4}:{5}".format(date[0],date[1],date[2],date[3],date[4],date[5]))print(i) result = GNSS_Read()if result:print(result)huart2.write(str(result))i=i+1time.sleep(1)passif __name__ == '__main__':main()附录:列表的赋值类型和py打包
列表赋值
BUG复现
闲来无事写了个小程序 代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
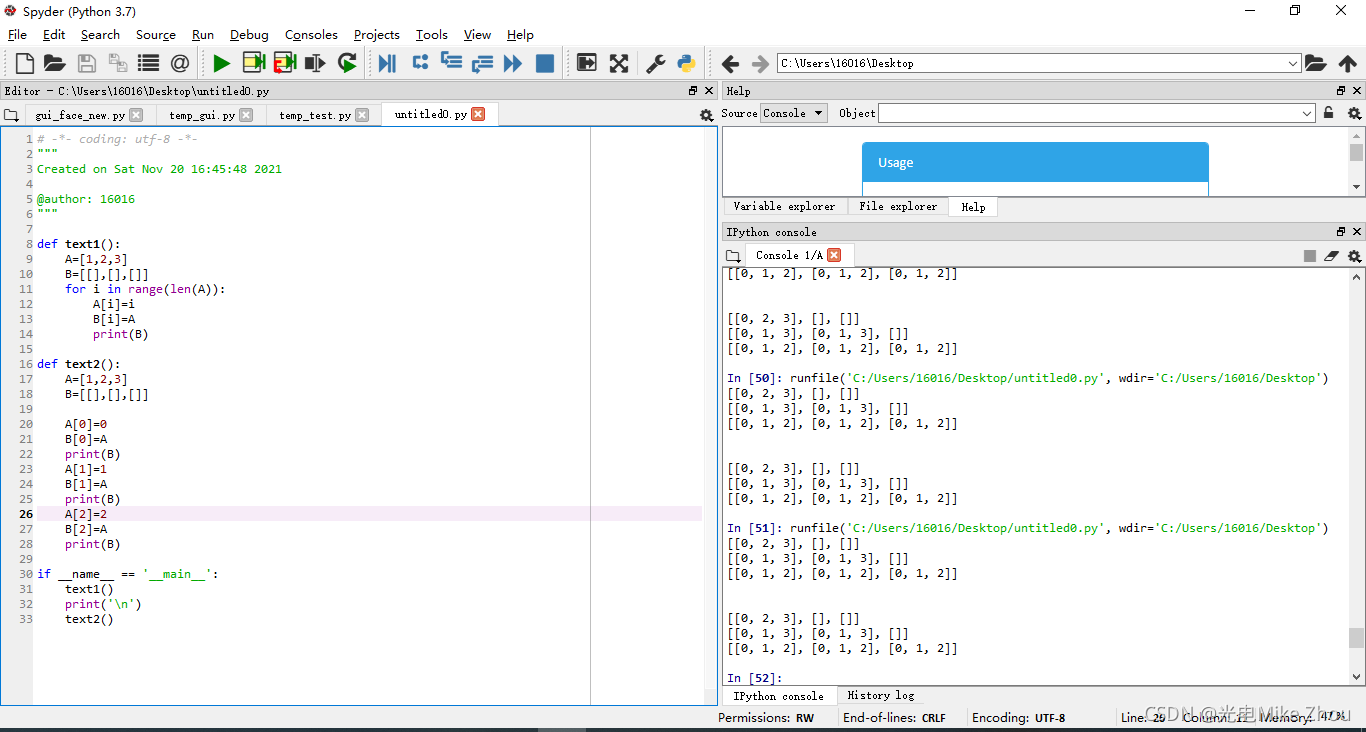
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)c_list[j]=a_listprint('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
#print(c_list,'\n')
我在程序中 做了一个16次的for循环 把列表a的每个值后面依次加上"_"和循环序号
比如循环第x次 就是把第x位加上_x 这一位变成x_x 我在输出测试中 列表a的每一次输出也是对的
循环16次后列表a应该变成[‘0_0’, ‘1_1’, ‘2_2’, ‘3_3’, ‘4_4’, ‘5_5’, ‘6_6’, ‘7_7’, ‘8_8’, ‘9_9’, ‘10_10’, ‘11_11’, ‘12_12’, ‘13_13’, ‘14_14’, ‘15_15’] 这也是对的
同时 我将每一次循环时列表a的值 写入到空列表c中 比如第x次循环 就是把更改以后的列表a的值 写入到列表c的第x位
第0次循环后 c[0]的值应该是[‘0_0’, ‘1’, ‘2’, ‘3’, ‘4’, ‘5’, ‘6’, ‘7’, ‘8’, ‘9’, ‘10’, ‘11’, ‘12’, ‘13’, ‘14’, ‘15’] 这也是对的
但是在第1次循环以后 c[0]的值就一直在变 变成了c[x]的值
相当于把c_list[0]变成了c_list[1]…以此类推 最后得出的列表c的值也是每一项完全一样
我不明白这是怎么回事
我的c[0]只在第0次循环时被赋值了 但是后面它的值跟着在改变
如图:
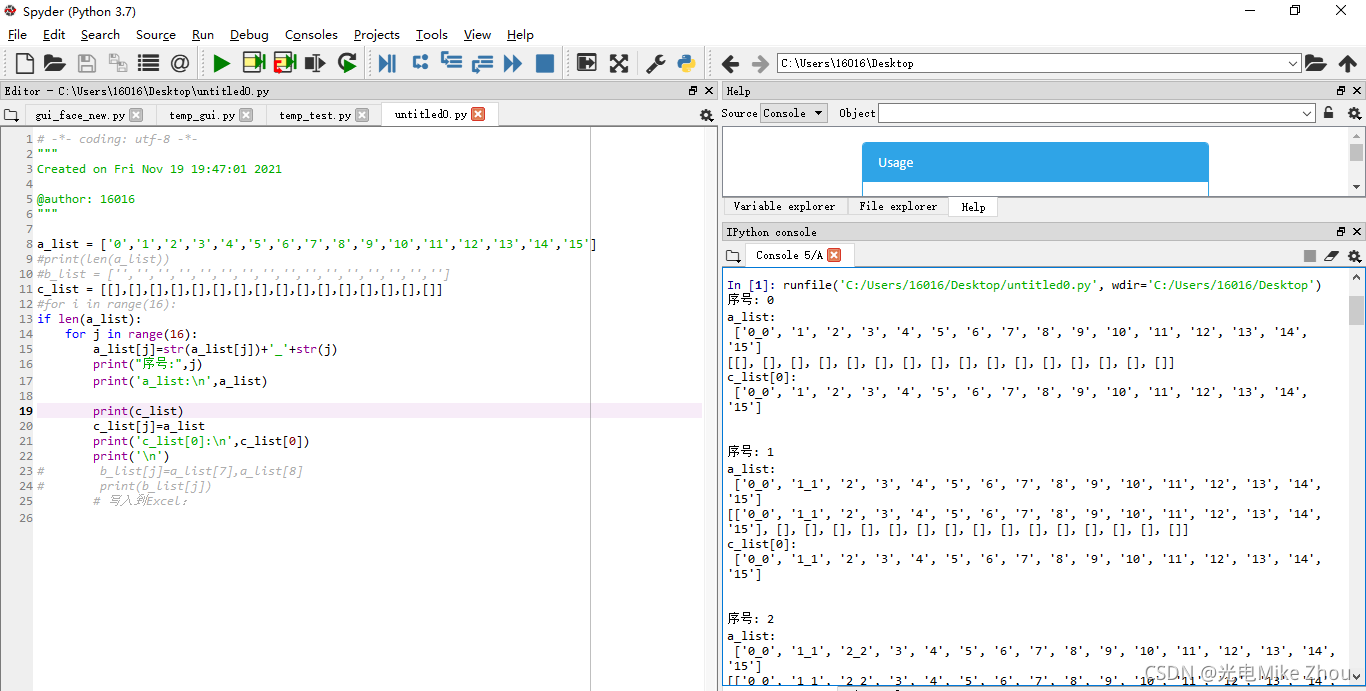
第一次老出bug 赋值以后 每次循环都改变c[0]的值 搞了半天都没搞出来
无论是用appen函数添加 还是用二维数组定义 或者增加第三个空数组来过渡 都无法解决
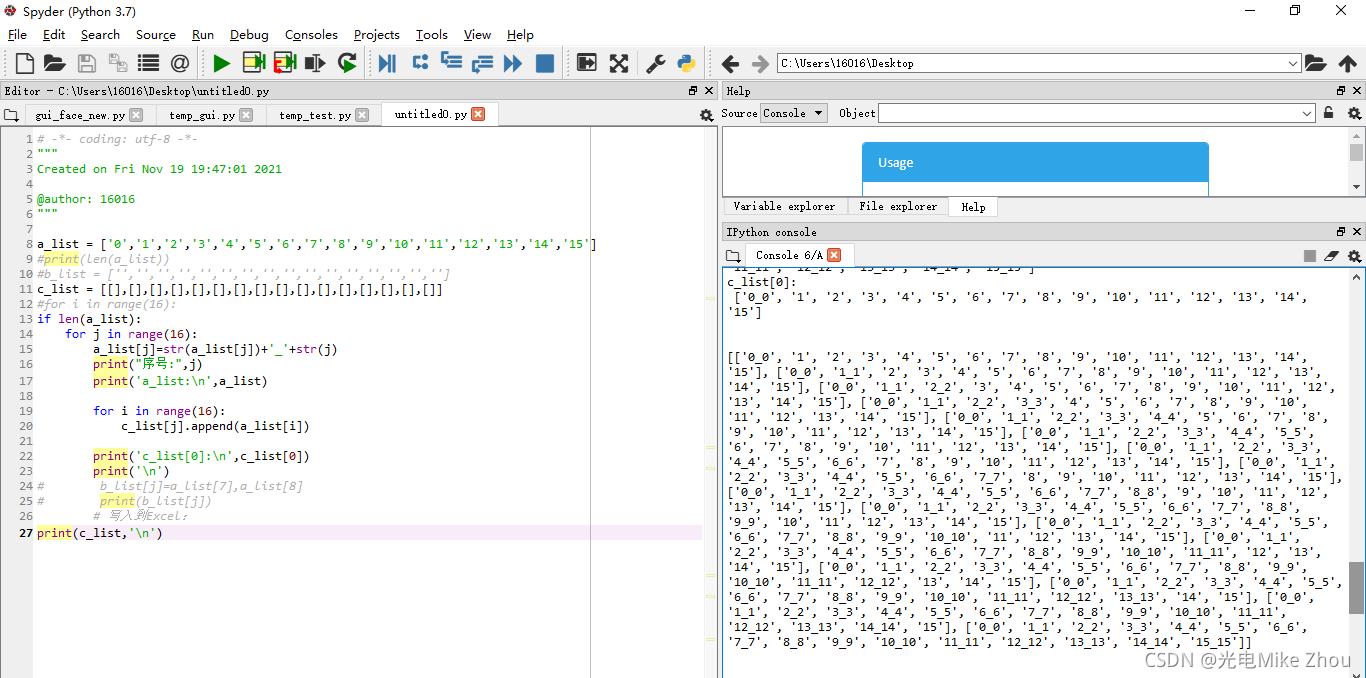
代码改进
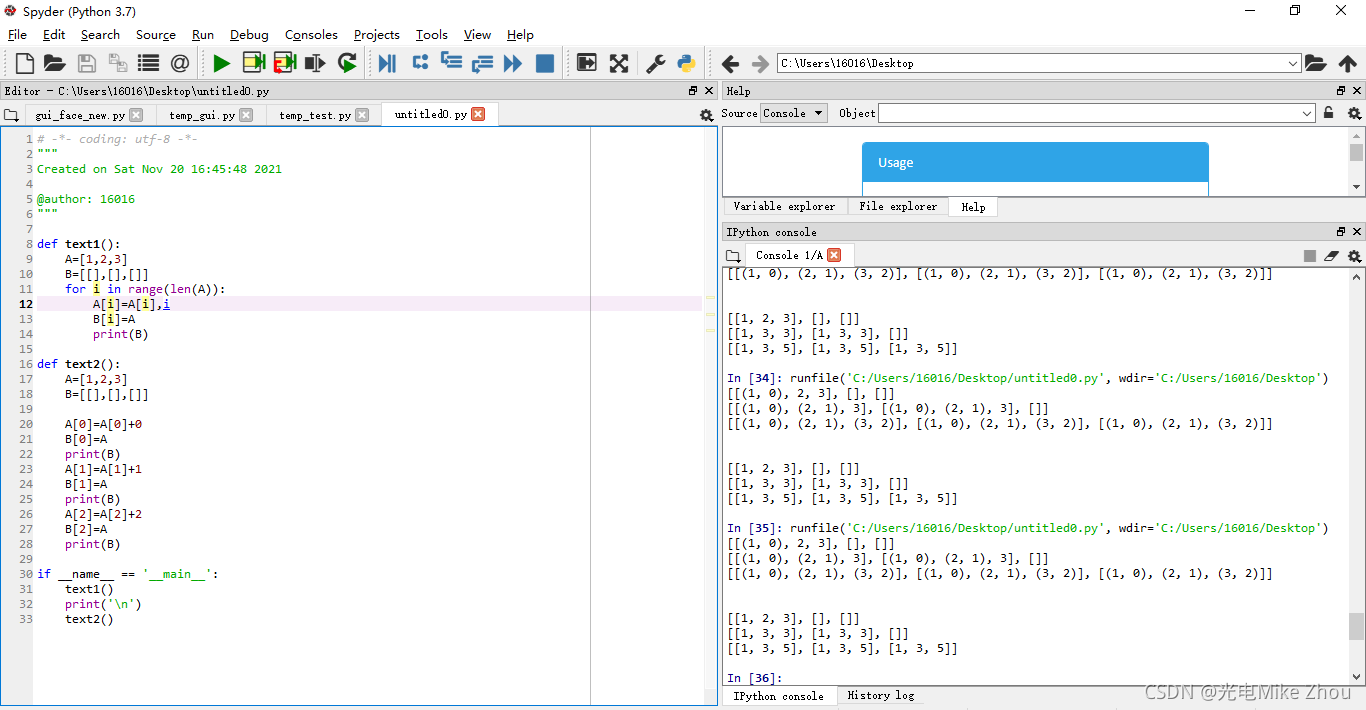
后来在我华科同学的指导下 突然想到赋值可以赋的是个地址 地址里面的值一直变化 导致赋值也一直变化 于是用第二张图的循环套循环深度复制实现了
代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)for i in range(16):c_list[j].append(a_list[i])print('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
print(c_list,'\n')
解决了问题
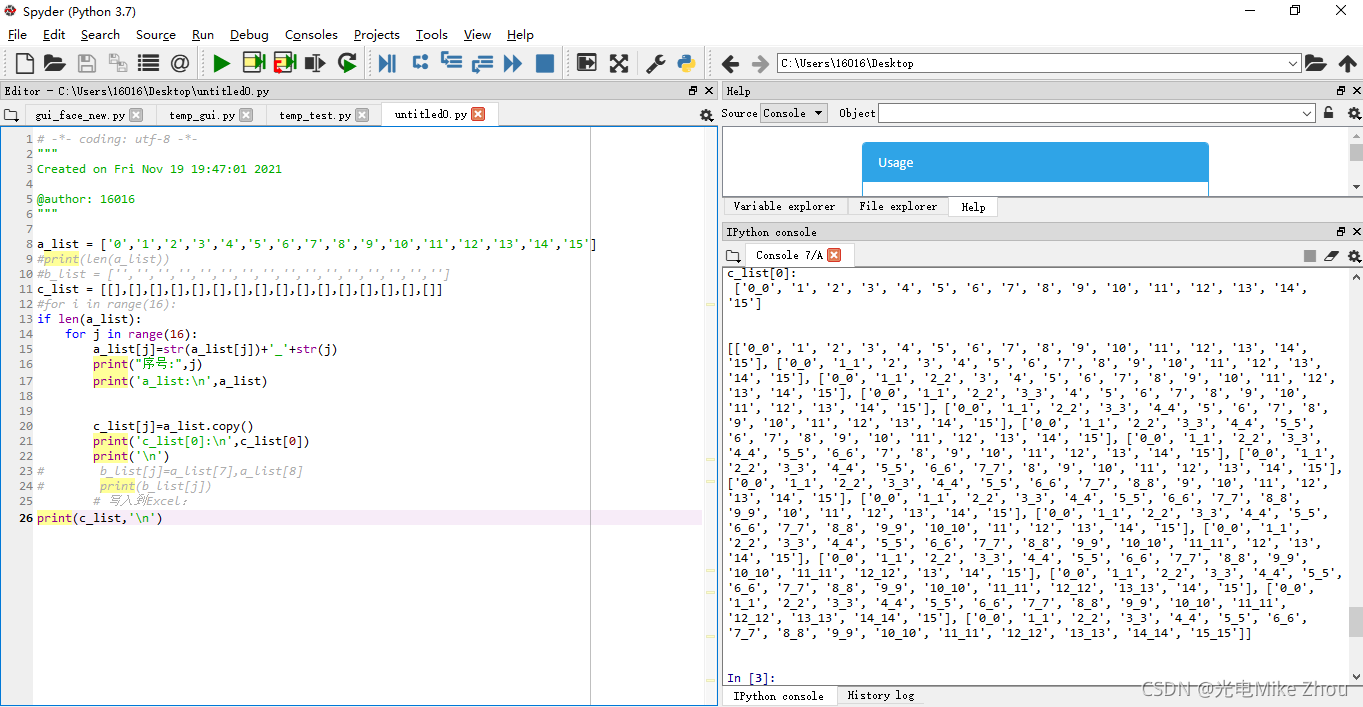
优化
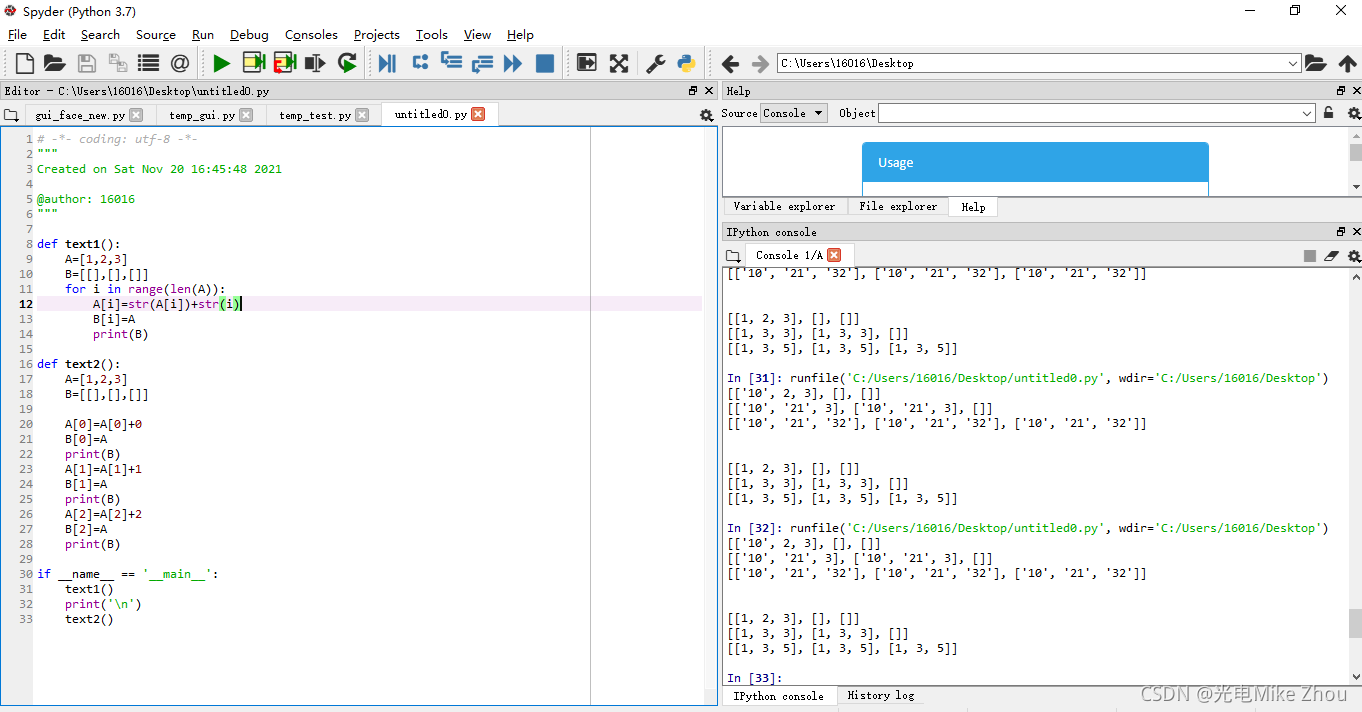
第三次是请教了老师 用copy函数来赋真值
代码如下:
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 19 19:47:01 2021@author: 16016
"""a_list = ['0','1','2','3','4','5','6','7','8','9','10','11','12','13','14','15']
#print(len(a_list))
#b_list = ['','','','','','','','','','','','','','','','']
c_list = [[],[],[],[],[],[],[],[],[],[],[],[],[],[],[],[]]
#for i in range(16):
if len(a_list):for j in range(16):a_list[j]=str(a_list[j])+'_'+str(j)print("序号:",j)print('a_list:\n',a_list)c_list[j]=a_list.copy()print('c_list[0]:\n',c_list[0])print('\n')
# b_list[j]=a_list[7],a_list[8]
# print(b_list[j])# 写入到Excel:
#print(c_list,'\n')
同样能解决问题
最后得出问题 就是指针惹的祸!
a_list指向的是个地址 而不是值 a_list[i]指向的才是单个的值 copy()函数也是复制值而不是地址
如果这个用C语言来写 就直观一些了 难怪C语言是基础 光学Python不学C 遇到这样的问题就解决不了
C语言yyds Python是什么垃圾弱智语言
总结
由于Python无法单独定义一个值为指针或者独立的值 所以只能用列表来传送
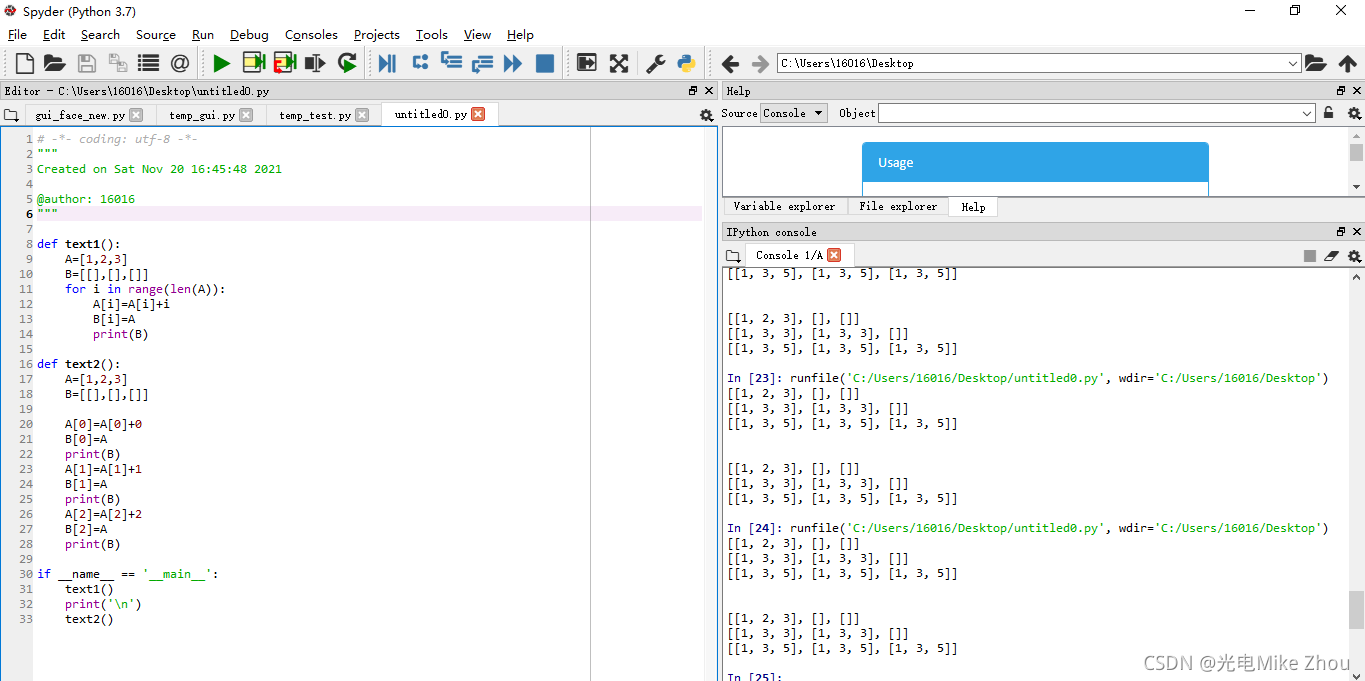
只要赋值是指向一个列表整体的 那么就是指向的一个指针内存地址 解决方法只有一个 那就是将每个值深度复制赋值(子列表内的元素提取出来重新依次连接) 或者用copy函数单独赋值
如图测试:

部分代码:
# -*- coding: utf-8 -*-
"""
Created on Sat Nov 20 16:45:48 2021@author: 16016
"""def text1():A=[1,2,3]B=[[],[],[]]for i in range(len(A)):A[i]=A[i]+iB[i]=Aprint(B)def text2():A=[1,2,3]B=[[],[],[]]A[0]=A[0]+0B[0]=Aprint(B)A[1]=A[1]+1B[1]=Aprint(B)A[2]=A[2]+2B[2]=Aprint(B)if __name__ == '__main__':text1()print('\n')text2()
py打包
Pyinstaller打包exe(包括打包资源文件 绝不出错版)
依赖包及其对应的版本号
PyQt5 5.10.1
PyQt5-Qt5 5.15.2
PyQt5-sip 12.9.0
pyinstaller 4.5.1
pyinstaller-hooks-contrib 2021.3
Pyinstaller -F setup.py 打包exe
Pyinstaller -F -w setup.py 不带控制台的打包
Pyinstaller -F -i xx.ico setup.py 打包指定exe图标打包
打包exe参数说明:
-F:打包后只生成单个exe格式文件;
-D:默认选项,创建一个目录,包含exe文件以及大量依赖文件;
-c:默认选项,使用控制台(就是类似cmd的黑框);
-w:不使用控制台;
-p:添加搜索路径,让其找到对应的库;
-i:改变生成程序的icon图标。
如果要打包资源文件
则需要对代码中的路径进行转换处理
另外要注意的是 如果要打包资源文件 则py程序里面的路径要从./xxx/yy换成xxx/yy 并且进行路径转换
但如果不打包资源文件的话 最好路径还是用作./xxx/yy 并且不进行路径转换
def get_resource_path(relative_path):if hasattr(sys, '_MEIPASS'):return os.path.join(sys._MEIPASS, relative_path)return os.path.join(os.path.abspath("."), relative_path)而后再spec文件中的datas部分加入目录
如:
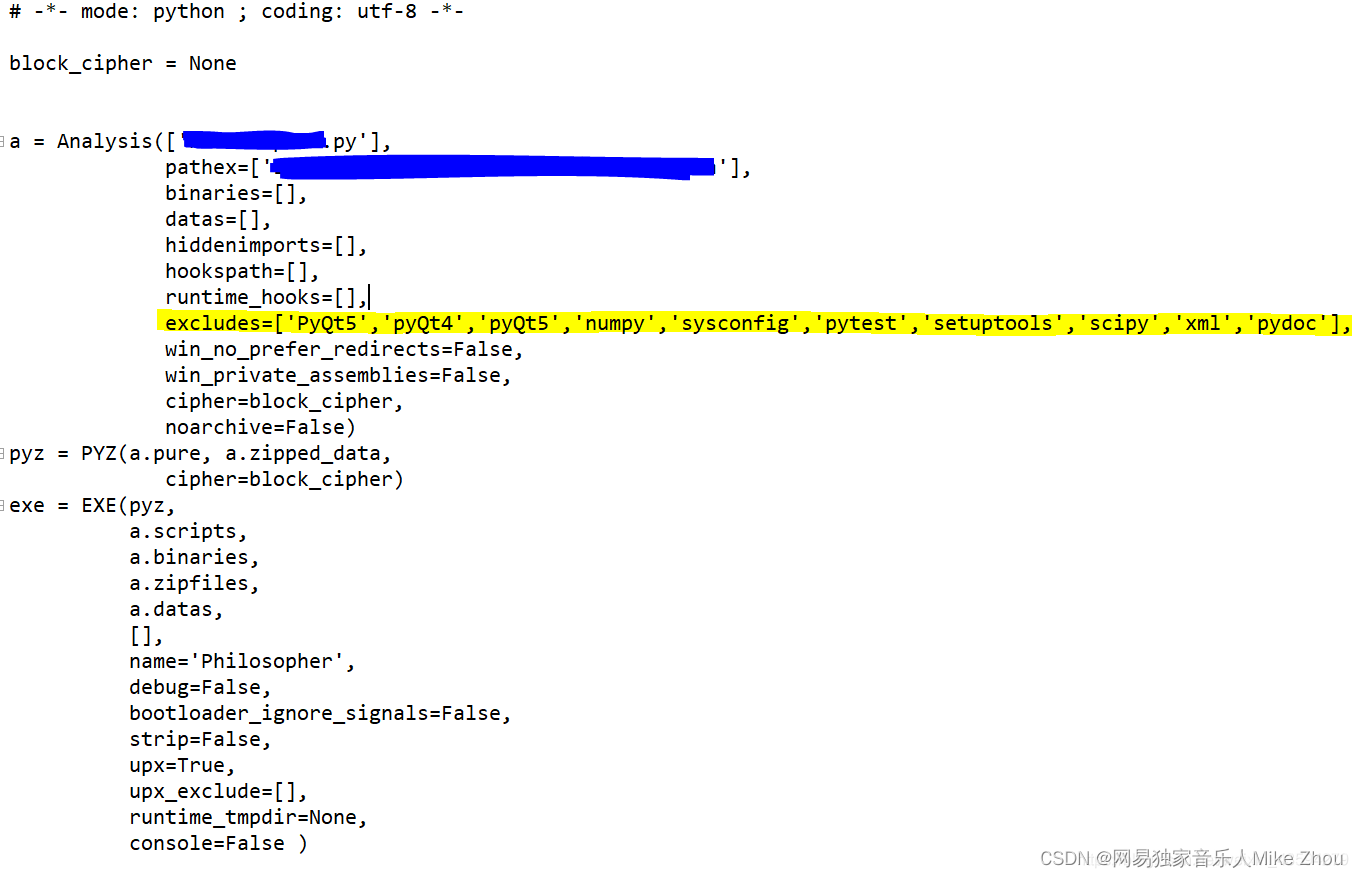
a = Analysis(['cxk.py'],pathex=['D:\\Python Test\\cxk'],binaries=[],datas=[('root','root')],hiddenimports=[],hookspath=[],hooksconfig={},runtime_hooks=[],excludes=[],win_no_prefer_redirects=False,win_private_assemblies=False,cipher=block_cipher,noarchive=False)
而后直接Pyinstaller -F setup.spec即可
如果打包的文件过大则更改spec文件中的excludes 把不需要的库写进去(但是已经在环境中安装了的)就行
这些不要了的库在上一次编译时的shell里面输出
比如:
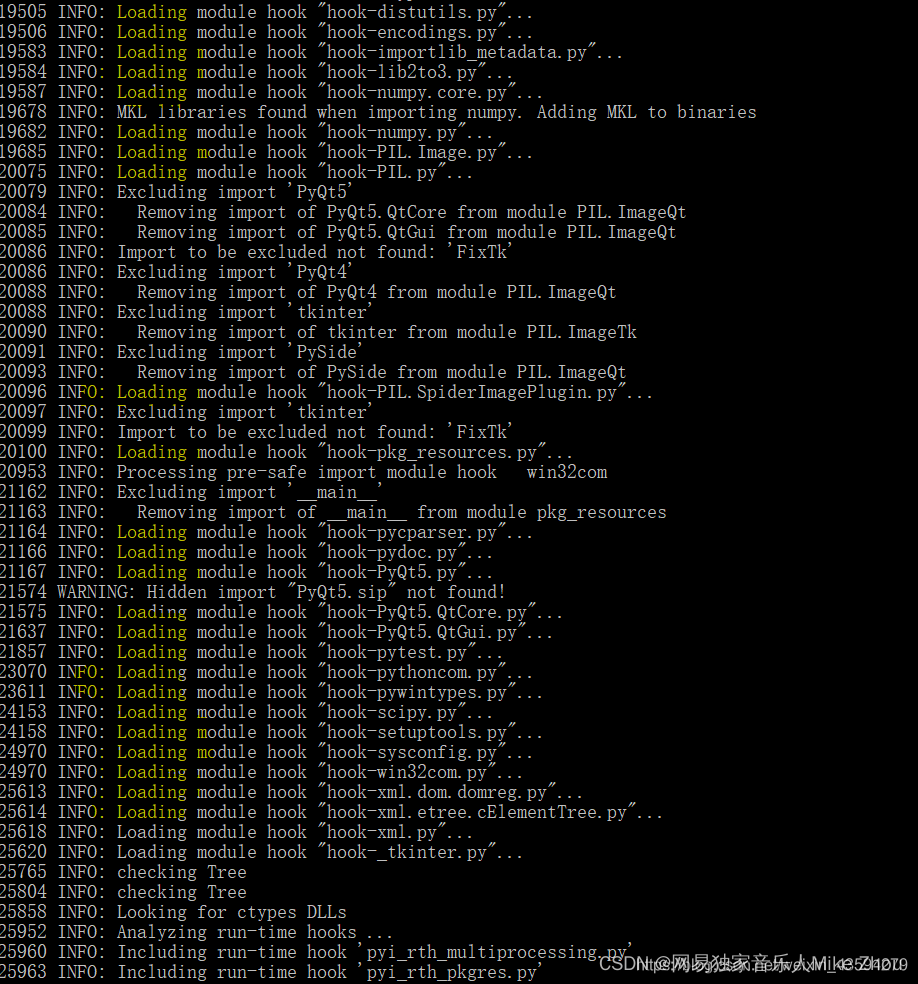
然后用pyinstaller --clean -F 某某.spec
相关文章:
【移远QuecPython】EC800M物联网开发板的内置GNSS定位获取(北斗、GPS和GNSS)
【移远QuecPython】EC800M物联网开发板的内置GNSS定位获取(北斗、GPS和GNSS) 测试视频(其中的恶性BUG会在下一篇文章阐述): 【移远QuecPython】EC800M物联网开发板的内置GNSS定位的恶性BUG(目前没有完全的…...

软件设计师2016下半年下午——KMP算法和装饰设计模式
下面是提供的代码的逐行注释,以及对next数组在KMP算法中的作用的解释: #include <iostream> #include <vector> using namespace std;void buildNextArray(const char* pattern, vector<int>& next) {int m strlen(pattern); …...
方法报错)
Android Studio run main()方法报错
在studio中想要测试某个功能直接执行main()方法报错如下: * What went wrong: A problem occurred configuring project :app. > Could not create task :app: **** .main().> SourceSet with name main not found.解决方案: 执行run ** main() w…...

CM3D2 汉化杂记
老物难找资源,于是尝试自己汉化,皆源于有一个好的汉化插件。 资源:LMMT 工具:CM3D2.SubtitleDumper.exe,有道翻译(可以翻译文档),Libreoffice(文档、表格) cmd(资源管理器的结果可以拖进去&…...

分类预测 | Matlab实现SMA-KELM黏菌优化算法优化核极限学习机分类预测
分类预测 | Matlab实现SMA-KELM黏菌优化算法优化核极限学习机分类预测 目录 分类预测 | Matlab实现SMA-KELM黏菌优化算法优化核极限学习机分类预测分类效果基本描述程序设计参考资料 分类效果 基本描述 1.MATLAB实现SMA-KELM黏菌优化算法优化核极限学习机分类预测(完整源码和数…...
linux的环境安装以及部署前后端分离后台接口
⭐⭐ linux专栏:linux专栏 ⭐⭐ 个人主页:个人主页 目录 一.linux安装环境 1.1 jdk和tomcat的安装配置 1.1.1 解压jdk和tomcat的安装包 解压jdk安装包 解压tomcat安装包 1.2 jdk环境变量配置 1.3 tomcat启动 1.4 MySQL的安装 二.部署前后端分离…...

解决mysql数据库root用户看不到库
第一种方式: 1.首先停止MySQL服务:service mysqld stop 2.加参数启动mysql:/usr/bin/mysqld_safe --skip-grant-tables & 然后就可以无任何限制的访问mysql了 3.root用户登陆系统:mysql -u root -p mysql 4.切换数据库&#…...

【LeetCode】117. 填充每个节点的下一个右侧节点指针 II
117. 填充每个节点的下一个右侧节点指针 II 难度:中等 题目 给定一个二叉树: struct Node {int val;Node *left;Node *right;Node *next; }填充它的每个 next 指针,让这个指针指向其下一个右侧节点。如果找不到下一个右侧节点,…...

《研发效能(DevOps)工程师》课程简介(三)丨IDCF
在研发效能领域中,【开发与交付】的学习重点在于掌握高效的开发工具和框架,了解敏捷开发方法,掌握持续集成与持续交付技术,以及如何保证应用程序的安全性和合规性等方面。 由国家工业和信息化部教育与考试中心颁发的职业技术证书…...
主动激活木马加密流量分析
概述 在网络攻击中,木马病毒通常会使用监听某个端口的方式,或者直接连接C2地址、域名的方式来建立通信,完成命令与控制。而APT攻击中,攻击者为了更高级的潜伏隐蔽需求,其部署的木马或后门,会采用对网卡流量…...

关于单片机CPU如何控制相关引脚
目录 1、相关的单片机结构 2、通过LED的实例解释 1、相关的单片机结构 在寄存器中每一块都有一根导线与引脚对应,通过cpu改变寄存器内的数据(0或1),通过驱动器来控制对于的引脚。 2、通过LED的实例解释 如图所示,芯片…...

[概述] 获取点云数据的仪器
这里所说的获取点云的仪器指的是可以获取场景中物体距离信息的相关设备,下面分别从测距原理以及适用场景来进行介绍。 一、三角测距法 三角测距原理 就是利用三角形的几何关系来测量物体的距离。想象一下,你站在一个地方,你的朋友站在另一…...
路由器基础(八):策略路由配置
在实际网络应用中,策略路由也是一种重要的技术手段。尽管 在考试并不注重策略路由,但是实际上应用较多,建议考生除了掌握基本的静态路由协议IP route-static, 动态路由协议RIP 、OSPF的基础配置外,还要掌握如何配置策略路由。…...

Java 零碎知识点
目录 [多线程]创建多线程的三种方式 [网络编程]一、重点概念1、TCP/IP网络模型2、IP 对象3、端口号4、协议UDP(User Datagram Protocol)TCP(Transmission Control Protocol) 二、UDP 通信三、TCP 通信 [前端][Vue]一、Vue3项目创建响应式函数父子通信父传子子传父 跨层组件通信…...

多模态论文阅读之BLIP
BLIP泛读 TitleMotivationContributionModel Title BLIP: Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation Motivation 模型角度:clip albef等要么采用encoder-base model 要么采用encoder-decoder model.…...

OpenCV实战——OpenCV.js介绍
OpenCV实战——OpenCV.js介绍 0. 前言1. OpenCV.js 简介2. 网页编写3. 调用 OpenCV.js 库4. 完整代码相关链接 0. 前言 本节介绍如何使用 JavaScript 通过 OpenCV 开发计算机视觉算法。在 OpenCV.js 之前,如果想要在 Web 上执行一些计算机视觉任务,必须…...

qt5工程打包成可执行exe程序
一、编译生成.exe 1.1、在release模式下编译生成.exe 1.2、建一个空白文件夹package,再将在release模式下生成的.exe文件复制到新建的文件夹中package。 1.3、打开QT5的命令行 1.4、用命令行进入新建文件夹package,使用windeployqt对生成的exe文件进行动…...
Qt之基于QCustomPlot绘制直方图(Histogram),叠加正态分布曲线
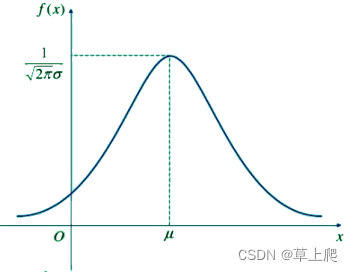
一.效果 二.原理 1.正态分布 高斯分布(Gaussian distribution),又名正态分布(Normal distribution),也称"常态分布",也就是说,在正常的状态下,一般的事物,都会符合这样的分布规律。 比如人的身高为一个随机变量,特别高的人比较少,特别矮的也很少,大部分都…...

232.用栈实现队列
原题链接:232.用栈实现队列 思路 主要是要注意栈和队列的数据结构的区别,一个是后进先出, 一个是先进先出 如果要用栈模拟队列的先进先出,那就得使用另一个辅助空间来存储栈的栈顶元素,然后把栈最底部的元素弹出&…...

C51--项目--感应开关盖垃圾桶
1、项目概述 功能描述: 检测靠近时,垃圾桶自动开盖并伴随滴一声,2s后关盖。 发生震动时,垃圾桶自动开盖并伴随滴一声,2s后关盖。 按下按键时,垃圾桶自动开盖并伴随滴一声,2s后关盖。 硬件说明…...

Arduino | 从串口收发到双向对话:实战指令解析与数据交换
1. 串口通讯:Arduino与世界的对话桥梁 第一次接触Arduino时,很多人都会从经典的Blink示例开始——让板载LED灯规律闪烁。但当你想要动态调整LED亮度时,就会发现需要一种与Arduino"对话"的方式。这就是串口通讯的用武之地。想象一下…...

RK3588开发板16GB LPDDR5与64GB eMMC性能解析与实战指南
1. 项目概述:当旗舰开发板遇上LPDDR5与超大存储最近在嵌入式圈子里,关于瑞芯微RK3588这颗“性能猛兽”的讨论热度一直没降下来。作为目前国产SoC里妥妥的旗舰,它集成的四核A76四核A55的CPU架构、高达6Tops算力的NPU,以及丰富的多媒…...

从决策树到XGBoost:核心原理、目标函数与工程优化全解析
1. 从“头发长短”到“预测房价”:决策树的灵魂与回归树的诞生很多朋友第一次接触XGBoost,或者更广义的树模型时,都会被一堆公式和术语劝退。什么信息增益、基尼系数、正则项、二阶泰勒展开……看几篇博客,感觉每篇都在自说自话&a…...

HiC-Pro跑完数据后,你的结果文件都看懂了吗?从out文件夹到可视化图谱的完整解读指南
HiC-Pro结果文件全解析:从原始数据到发表级图谱的实战指南 当HiC-Pro顺利完成运行后,面对out文件夹中密密麻麻的文件,很多研究者会陷入"数据沼泽"——明明流程跑通了,却不知道如何从这些中间文件中提取有价值的信息。本…...

AM62A1-Q1汽车视觉处理器:低功耗、高集成度的车载视觉解决方案
1. 项目概述:为什么我们需要一颗“小而美”的汽车视觉处理器?最近在做一个车载环视和DMS(驾驶员监控系统)的预研项目,客户对成本和功耗卡得非常死,但功能要求却一点没降:需要同时处理1到2路摄像…...

35+ 程序员必读:收藏!AI时代如何逆袭,成为最抢手的技术人才?
AI时代对程序员的影响是深远的,尤其是对于35岁的程序员,面临着被淘汰的压力。然而,AI也可以成为他们的优势,通过利用AI工具,他们可以放大自己的长板,如架构经验、业务理解和工程判断力。文章建议35岁的程序…...
)
为什么你的Perplexity薪资查询总返回403?3类Token权限陷阱+2种合法绕行路径(含Postman配置模板)
更多请点击: https://intelliparadigm.com 第一章:为什么你的Perplexity薪资查询总返回403?3类Token权限陷阱2种合法绕行路径(含Postman配置模板) 当你调用 Perplexity 提供的薪资数据 API(如 /v1/salari…...

体验Taotoken多模型路由带来的高稳定性与低延迟感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 体验Taotoken多模型路由带来的高稳定性与低延迟感受 1. 引言:开发中的稳定性与延迟挑战 在将大模型能力集成到应用的过…...

从信息网络到能源网络:聊聊2012年那篇关于‘能源路由器’的论文,它今天还有哪些启发?
能源路由器的十年回望:从TCP/IP隐喻到虚拟电厂的现实启示 十二年前那篇将能源网络类比TCP/IP协议的论文,在今天看来更像是一封来自过去的预言书。当我们在2023年讨论虚拟电厂和分布式能源交易时,会发现那些曾被视作天马行空的构想——能源操作…...

DNS 与 hosts 文件:Windows 11 中的名称解析配置
诸神缄默不语-个人技术博文与视频目录 一个域名会对应多个IP地址,当电脑访问域名时会默认指定访问其中一个IP地址(以下正文会介绍通过hosts文件和DNS服务器选择指定映射的IP的原理),总之有时我们可能会需要将域名对应的IP地址指定…...