【实验记录】为了混毕业·读读论文叭
PR曲线
1. Robust_Place_Recognition_using_an_Imaging_Lidar
在第三节方法中,提到了一些列处理步骤,分析来与vins相似,在vins中是关键帧检索、特征提取、DBoW查询、描述子匹配、PnP RANSAC求解。
第四节的实验部分,没有绘制pr曲线,而是针对某一次实验计算了总共的loop次数、真阳性和假阳性,
If the position between the matched nodes is less than 2m, we consider this detection a true positive, otherwise a false positive.
如果匹配节点之间的位置小于2m,则认为该检测为真阳性,否则为假阳性。
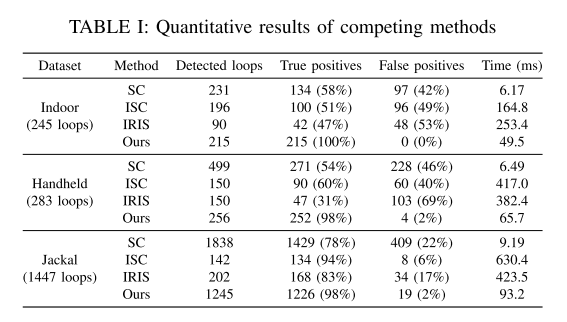
结论部分,将激光雷达当作深度相机去用,提取DBoW词袋中的点云来查询,其他没区别。
2.Scan context: Egocentric spatial descriptor for place recognition within 3d point cloud map
Visual recognition is popular together with the widespread use of camera sensors, however, it is inherently difficult due to illumination variance and short-term (e.g., moving objects) or long-term (e.g., seasons) changes. Similar environments may occur at different locations often causing perception aliasing.
随着相机传感器的广泛使用,视觉识别变得越来越流行,然而,由于光照的变化和短期(如移动物体)或长期(如季节)的变化,视觉识别本身就很困难。相似的环境可能发生在不同的位置,经常导致感知混叠。
相关文章:
【实验记录】为了混毕业·读读论文叭
PR曲线 1. Robust_Place_Recognition_using_an_Imaging_Lidar 在第三节方法中,提到了一些列处理步骤,分析来与vins相似,在vins中是关键帧检索、特征提取、DBoW查询、描述子匹配、PnP RANSAC求解。 第四节的实验部分,没有绘制pr…...

asr翱捷LORA系列芯片选型参考推荐ASR6601/asr6505/asr6501/asr6500
ASR6601 SoC是国内首颗支持LoRa的LPWAN SoC。ASR6601芯片中集成的超低功耗收发机,除了支持LoRa调制方式外,还可以支持FSK收发、MSK收发和BPSK发射等。在3.3V电源供电的情况下,通过高功率PA,最大可发射22dBM的输出功率。ASR6601与A…...

Prometheus+Node_exporter+Grafana实现监控主机
PrometheusNode_exporterGrafana实现监控主机 如果没有安装相关的配置,首先要进行安装配置,环境是基于Linux,虚拟机的相关环境配置在文末给出,现在先讲解PrometheusNode_exporterGrafana的安装和使用。 一.Prometheus安装 虽然…...
)
odoo启动-加载模块(load_modules)
odoo启动-加载模块(load_modules) odoo每次启动的时候都会加载模块,加载模块的过程就是调用load_modules 函数 在函数位于 odoo\modules\loading.py 代码中注释也写的很清楚,共分了9个步骤,其实是8个步骤。 这个函…...
【入门Flink】- 02Flink经典案例-WordCount
WordCount 需求:统计一段文字中,每个单词出现的频次 添加依赖 <properties><flink.version>1.17.0</flink.version></properties><dependencies><dependency><groupId>org.apache.flink</groupId><…...

go语言将cmd stdout和stderr作为字符串返回而不是打印到控制台
go语言将cmd stdout和stderr作为字符串返回而不是打印到控制台 1、直接打印到控制台 从 golang 应用程序中执行 bash 命令,现在 stdout 和 stderr 直接进入控制台: cmd.Stdout os.Stdout cmd.Stderr os.Stderrpackage mainimport ("fmt"…...
OpenGL ES入门教程(二)之绘制一个平面桌子
OpenGL ES入门教程(二)之绘制一个平面桌子 前言0. OpenGL绘制图形的整体框架概述1. 定义顶点2. 定义着色器3. 加载着色器4. 编译着色器5. 将着色器链接为OpenGL程序对象6. 将着色器需要的数据与拷贝到本地的数组相关联7. 在屏幕上绘制图形8. 让桌子有边框…...

el-select 搜索无选项时 请求接口添加输入的值
el-select 搜索无选项时 请求接口添加输入的值 <template><div class"flex"><el-select class"w250" v-model"state.brand.id" placeholder"请选择" clearable filterable :filter-method"handleQu…...

基于单片机的商场防盗防火系统设计
收藏和点赞,您的关注是我创作的动力 文章目录 概要 一、系统分析二、系统总设计2.1基于单片机的商场防火防盗系统的总体功能2.2系统的组成 三 软件设计4.1软件设计思路4.2软件的实现4.2.1主控模块实物 四、 结论五、 文章目录 概要 本课题设计一种商场防火防盗报警…...

【Java|golang】2103. 环和杆---位运算
总计有 n 个环,环的颜色可以是红、绿、蓝中的一种。这些环分别穿在 10 根编号为 0 到 9 的杆上。 给你一个长度为 2n 的字符串 rings ,表示这 n 个环在杆上的分布。rings 中每两个字符形成一个 颜色位置对 ,用于描述每个环: 第 …...
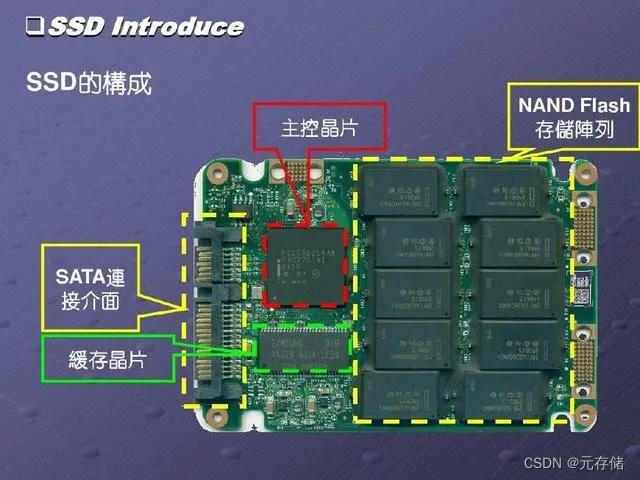
[SSD综述 1.4] SSD固态硬盘的架构和功能导论
依公知及经验整理,原创保护,禁止转载。 专栏 《SSD入门到精通系列》 <<<< 返回总目录 <<<< 前言 机械硬盘的存储系统由于内部结构, 其IO访问性能无法进一步提高,CPU与存储器之间的性能差距逐渐扩大。以Nand Flash为存储介质的固态硬盘技术的发展,…...

【C++那些事儿】类与对象(1)
君兮_的个人主页 即使走的再远,也勿忘启程时的初心 C/C 游戏开发 Hello,米娜桑们,这里是君兮_,我之前看过一套书叫做《明朝那些事儿》,把本来枯燥的历史讲的生动有趣。而C作为一门接近底层的语言,无疑是抽象且难度颇…...
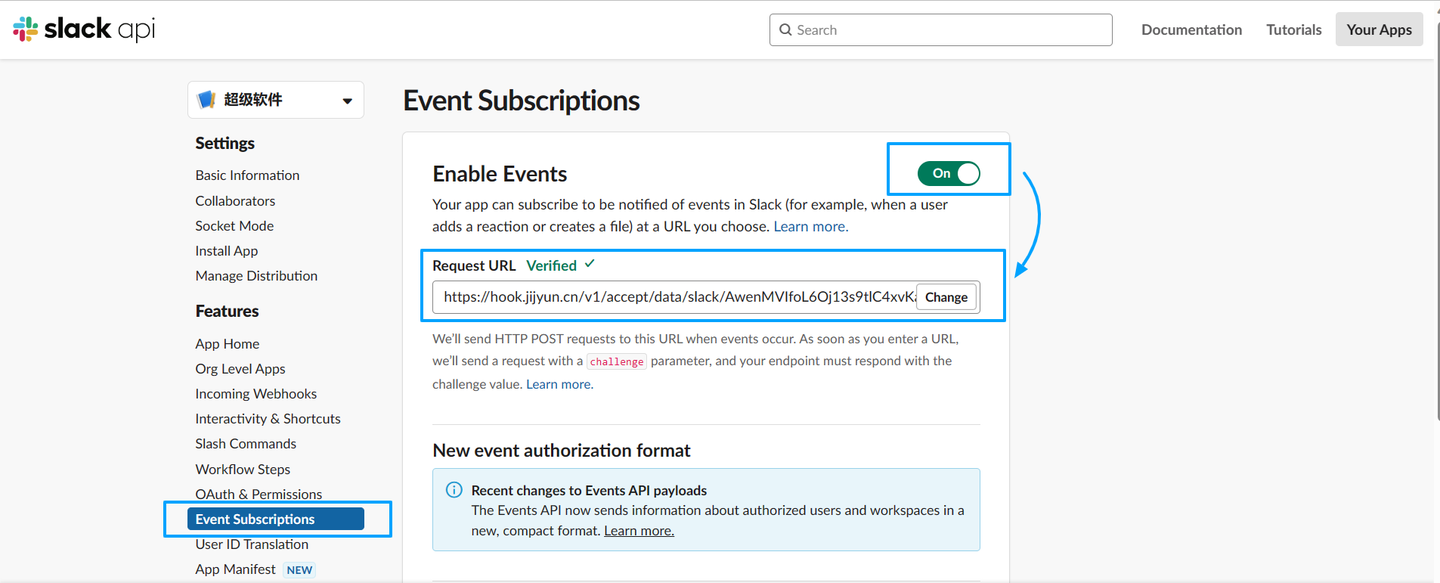
集简云x slack(自建)无需API开发轻松连接OA、电商、营销、CRM、用户运营、推广、客服等近千款系统
slack是一个工作效率管理平台,让每个人都能够使用无代码自动化和 AI 功能,还可以无缝连接搜索和知识共享,并确保团队保持联系和参与。在世界各地,Slack 不仅受到公司的信任,同时也是人们偏好使用的平台。 官网&#x…...

JS模块化,ESM模块规范的 导入、导出、引用、调用详解
JS模块化,ESM模块规范的 导入、导出、引用、调用详解 写在前面实例代码1、模块导出 - export导出之 - 独立导出导出之 - 集中多个导出导出之 - 默认导出导出之 - 集中默认导出导出之 - 混合导出 2、模块导入 - import导入之 - 全部导入导入之 - 默认导入导入之 - 指…...

markdown常用的快捷键
一级标题 #加 空格 是一级标题 二级标题 ##加空格是二级标题 三级标题 字体 * 粗体:两个**号 斜体:一个 斜体加粗:三个 删除:两个~~ 我是字体 我是字体 我是字体 我是字体 引用 箭头符号>加空格 回车 分割线 三个 - …...
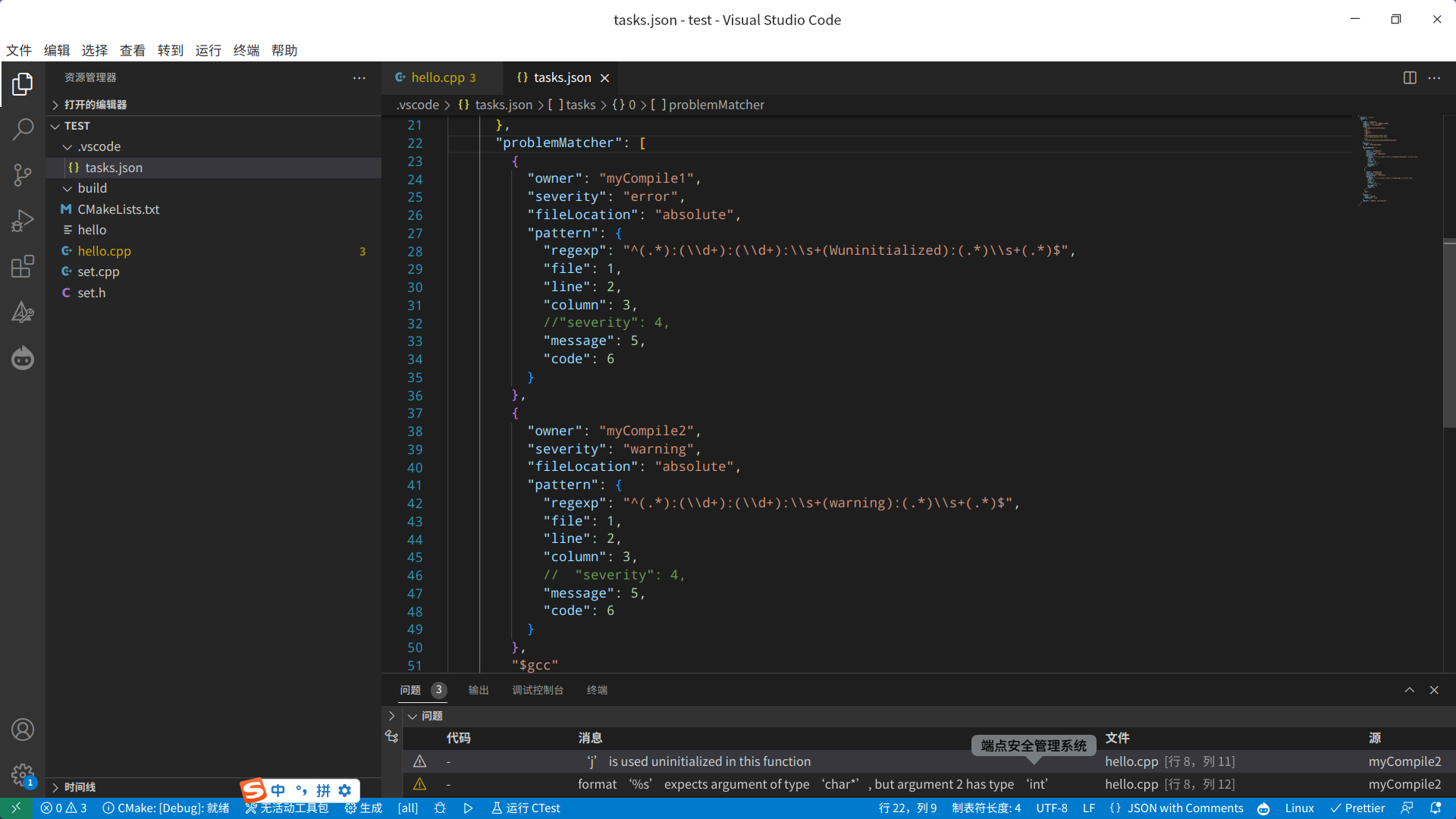
VSCode中的任务什么情况下需要配置多个问题匹配器problemMatcher?多个问题匹配器之间的关系是什么?
☞ ░ 前往老猿Python博客 ░ https://blog.csdn.net/LaoYuanPython 一、简介 在 VS Code 中,tasks.json 文件中的 problemMatcher 字段用于定义如何解析任务输出中的问题(错误、警告等)。 problemMatcher是一个描述问题匹配器的接口&…...

C语言鞍点数组改进版
题目内容: 给定一个n*n矩阵A。矩阵A的鞍点是一个位置(i,j),在该位置上的元素是第i行上的最大数,第j列上的最小数。一个矩阵A也可能没有鞍点。 你的任务是找出A的鞍点。 改进目标: 网络上很多…...
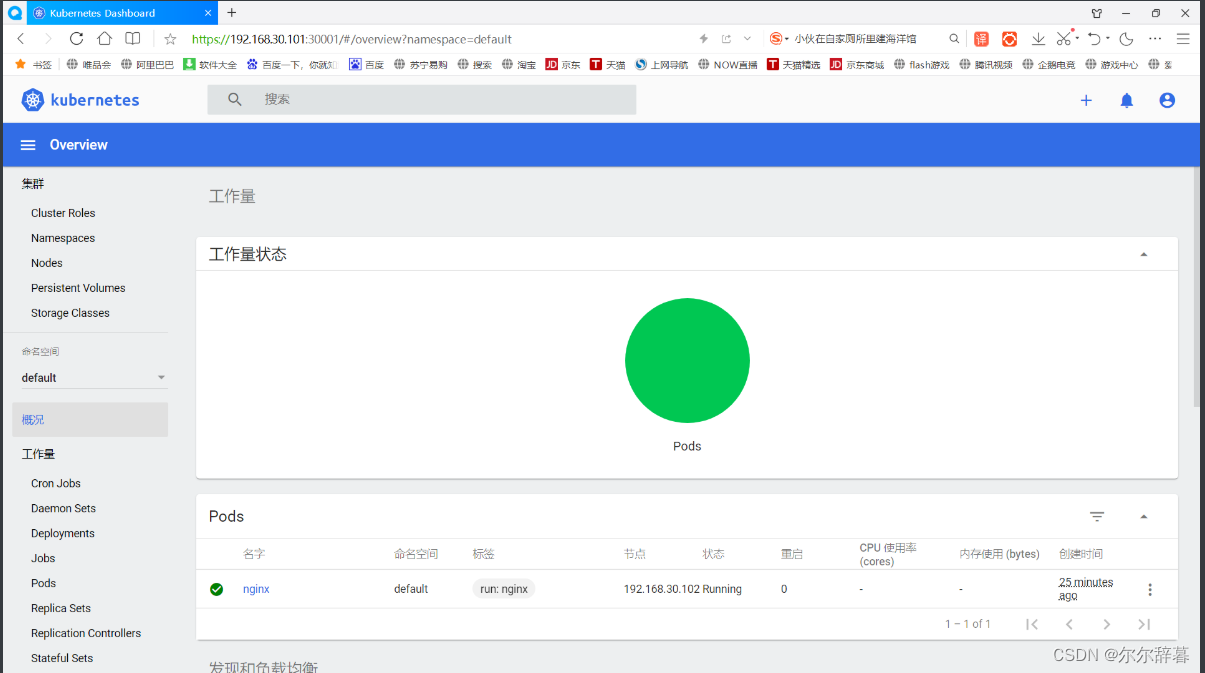
K8s:部署 CNI 网络组件+k8s 多master集群部署+负载均衡及Dashboard k8s仪表盘图像化展示
目录 1 部署 CNI 网络组件 1.1 部署 flannel 1.2 部署 Calico 1.3 部署 CoreDNS 2 负载均衡部署 3 部署 Dashboard 1 部署 CNI 网络组件 1.1 部署 flannel K8S 中 Pod 网络通信: ●Pod 内容器与容器之间的通信 在同一个 Pod 内的容器(Pod 内的容…...
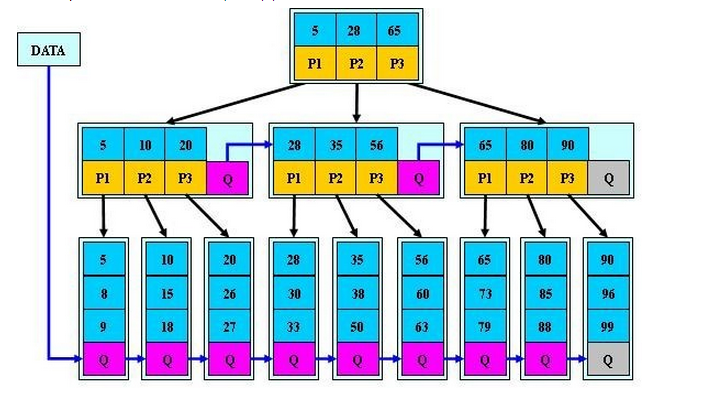
【数据结构】树家族
目录 树的相关术语树家族二叉树霍夫曼树二叉查找树 BST平衡二叉树 AVL红黑树伸展树替罪羊树 B树B树B* 树 当谈到数据结构中的树时,我们通常指的是一种分层的数据结构,它由节点(nodes)组成,这些节点之间以边(…...

Vert.x学习笔记-Vert.x的基本处理单元Verticle
Verticle介绍 Verticle是Vert.x的基本处理单元,Vert.x应用程序中存在着处理各种事件的处理单元,比如负责HTTP API响应请求的处理单元、负责数据库存取的处理单元、负责向第三方发送请求的处理单元。Verticle就是对这些功能单元的封装,Vertic…...

中兴光猫终极管理工具:一键开启工厂模式与永久Telnet完全指南
中兴光猫终极管理工具:一键开启工厂模式与永久Telnet完全指南 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu zteOnu是一款专为中兴光猫设备设计的开源管理工具,…...

英雄联盟录像编辑完整教程:5分钟掌握League Director专业工具
英雄联盟录像编辑完整教程:5分钟掌握League Director专业工具 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/leaguedirector …...

Hitboxer:3分钟解决游戏按键冲突的SOCD重映射利器
Hitboxer:3分钟解决游戏按键冲突的SOCD重映射利器 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 你是否在激烈的游戏对战中因按键冲突而错失良机?Hitboxer是一款专业的SOCD按键重映射工…...

生成式AI项目实战:从PyTorch到Hugging Face的完整开发指南
1. 项目概述:从GitHub仓库名到生成式AI项目的实战蓝图看到HeyNina101/generative_ai_project这个仓库名,很多开发者会心一笑。这太典型了——一个以个人ID命名的GitHub仓库,里面很可能是一个关于生成式人工智能(Generative AI&…...

石榴石固态电解质表面再生:氧气处理与气氛控制的关键突破
1. 项目概述:破解石榴石固态电解质表面钝化的密码如果你正在研究或关注下一代高能量密度电池,那么对固态电解质(Solid Electrolyte, SE)一定不陌生。在众多候选者中,石榴石型固态电解质,特别是掺杂的LLZO&a…...

基于FONA808与Adafruit IO的实时GPS追踪系统实战
1. 项目概述与核心价值又到了一年一度的万圣节,孩子们最兴奋的“不给糖就捣蛋”活动即将上演。作为一个技术爱好者兼“鸡娃”家长,我每年都在琢磨怎么让这个传统活动变得更有趣、更高效。去年,我儿子抱怨说走了半天路,拿到的糖果却…...

避坑指南:STM32CubeMX配置高级定时器PWM时,时钟源、ARR重载和DMA传输的那些坑
STM32高级定时器PWM配置实战:从时钟陷阱到DMA优化的深度解析 引言 深夜的实验室里,示波器上跳动的波形总是不尽如人意——这可能是许多嵌入式开发者使用STM32高级定时器输出PWM时的共同经历。不同于基础定时器,高级定时器(如TIM1/…...

CodeWF Toolbox:一个用 Avalonia + Prism 做出来的开发者工具箱
今天这篇文章,站长来聊聊我自己开发的 CodeWF Toolbox,CodeWF 工具箱。熟悉我的朋友一般都叫我“站长”,因为我还有一个网站:CodeWF。这个工具箱也是围绕我平时写代码、维护网站、整理资料、排查问题时反复遇到的需求做出来的。它…...

CircuitPython库管理实战:从安装优化到API深度应用
1. 项目概述与核心价值在嵌入式硬件开发的世界里,CircuitPython以其极低的入门门槛和“即写即得”的交互体验,成为了连接创意与现实的绝佳桥梁。无论是点亮第一颗LED,还是驱动复杂的传感器网络,其丰富的库生态系统都是项目成功的基…...
)
NotebookLM新闻传播研究落地全图谱(2024最新实证报告)
更多请点击: https://kaifayun.com 第一章:NotebookLM新闻传播研究的范式演进与学科定位 NotebookLM 作为 Google 推出的面向研究者的 AI 助手,其核心设计理念——以用户上传文档为知识锚点、通过引用溯源生成可信响应——正悄然重构新闻传播…...