第九周实验记录
1、安装Nerfstudio
环境配置
首先需要创建环境python=3.8,接着需要安装cuda11.7或11.3 这里安装cuda11.7
pip uninstall torch torchvision functorchpip install torch==1.13.1 torchvision functorch --extra-index-url https://download.pytorch.org/whl/cu117
安装tinycudann
直接使用 pip install 命令很可能出错
所以先git 下文件在安装
git clone --recursive https://github.com/nvlabs/tiny-cuda-nncd tiny-cuda-nncmake . -B buildcmake --build build --config RelWithDebInfo -j
在执行最后一步的时候可能会出现缺少文件的错误,需要升级cmake版本 参考链接
接着链接pytorch
cd tiny-cuda-nn/bindings/torchpython setup.py install #时间较长
测试 输入python
python
import tinycudann
如图 ,安装成功

安装nerfstudio
这里可以直接安装
pip install nerfstudio
也可以git安装
git clone https://github.com/nerfstudio-project/nerfstudio.gitcd nerfstudiopip install --upgrade pip setuptoolspip install -e .
运行实例
首先需要下载数据集,因为网络原因可能会无法下载,我是直接复制下载链接在浏览器下载。
ns-download-data nerfstudio --capture-name=poster
将数据集解压后,可以直接进行训练
ns-train nerfacto --data data/nerfstudio/poster

在HTTP框中 给出了viewer的地方,在pc端上使用ssh链接服务器 使用cmd输入
ssh -L 7007:localhost:7007 root@connect.beijinga.seetacloud.com -p 22048
复制链接打开浏览器,可以查看渲染情况

右侧可以渲染图像,得到视频,以及导出点云,在导出点云文件时命令可以运行,得到点云文件

2、MARS实验
按照github的命令配置环境,这里nerfstudio又安装了一些依赖
下载kitti数据集,一开始没有深度图,所以根据给的代码生成了深度图
开始训练(10月份版本的命令)
ns-train nsg-kitti-car-depth-recon --data /root/autodl-tmp/mars/data/kitti-MOT/training/image_02/0006
如果想读取已经训练的权重 :–load_dir /root/autodl-tmp/mars/outputs/0006/nsg-kitti-car-depth-recon/2023-11-04_090030/nerfstudio_models
一开始训练出现killed的情况

可能是内存不足,服务器换了160g内存进行重新训练,可以运行
可视化模型为wandb
查看训练曲线以及渲染图像情况



3090显卡,0006序列训练10万次大概9-10个小时
可视化同样可以使用nerfstudio提供的界面 --vis viewer(但是界面很奇怪)可能存在问题

并且根据提供的命令,渲染视频,也出现了错误,可能是nerfstudio安装出现问题,后续继续解决

下周计划
学习nerfstudio 查看论文、文档
解决本周出现的问题
详细阅读mars论文
相关文章:
第九周实验记录
1、安装Nerfstudio 环境配置 首先需要创建环境python3.8,接着需要安装cuda11.7或11.3 这里安装cuda11.7 pip uninstall torch torchvision functorchpip install torch1.13.1 torchvision functorch --extra-index-url https://download.pytorch.org/whl/cu117安…...
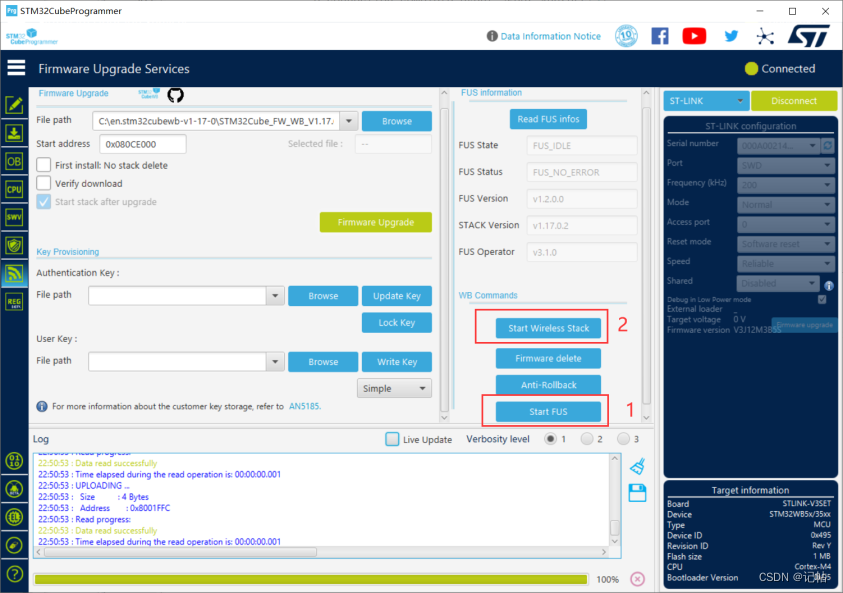
STM32WB55开发(6)----FUS更新
STM32WB55开发.6--FUS更新 概述视频教学硬件准备存储器映射FLASH安全区设置SRAM安全区设置通过USB进行下载注意事项 概述 在 STM32WB 微控制器中,FUS(Firmware Upgrade Services)是用于固件升级的一种服务。这项服务可以让你更新设备上的无…...

centos关闭Java进程的脚本
centos关闭Java进程的脚本,有时候服务就是个jar包,关闭程序又要找到进程ID,在kill掉,麻烦,这里就写了个脚本 小白教程,一看就会,一做就成。 1.脚本如下 #!/bin/bash ps -ef | grep java | gre…...
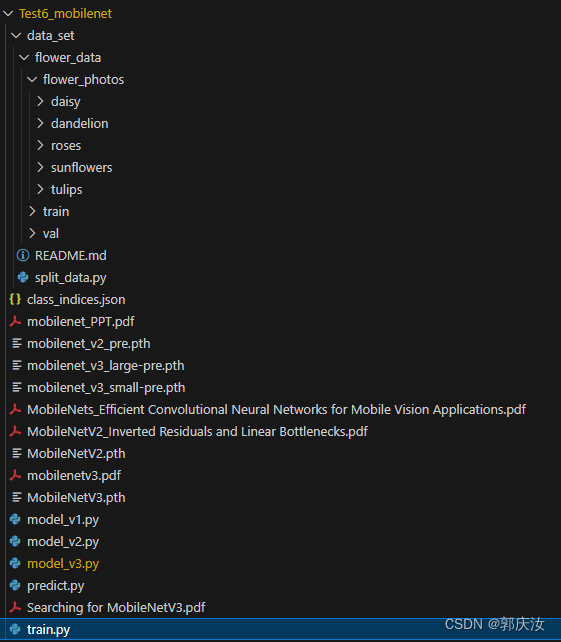
深度学习网络模型 MobileNet系列MobileNet V1、MobileNet V2、MobileNet V3网络详解以及pytorch代码复现
深度学习网络模型 MobileNet系列MobileNet V1、MobileNet V2、MobileNet V3网络详解以及pytorch代码复现 1、DW卷积与普通卷积计算量对比DW与PW计算量普通卷积计算量计算量对比 2、MobileNet V1MobileNet V1网络结构MobileNet V1网络结构代码 3、MobileNet V2倒残差结构模块倒残…...

Spring 中 BeanFactory 和 FactoryBean 有何区别?
这也是 Spring 面试时一道经典的面试问题,今天我们来聊一聊这个话题。 其实从名字上就能看出来个一二,BeanFactory 是 Factory 而 FactoryBean 是一个 Bean,我们先来看下总结: BeanFactory 是 Spring 框架的核心接口之一…...
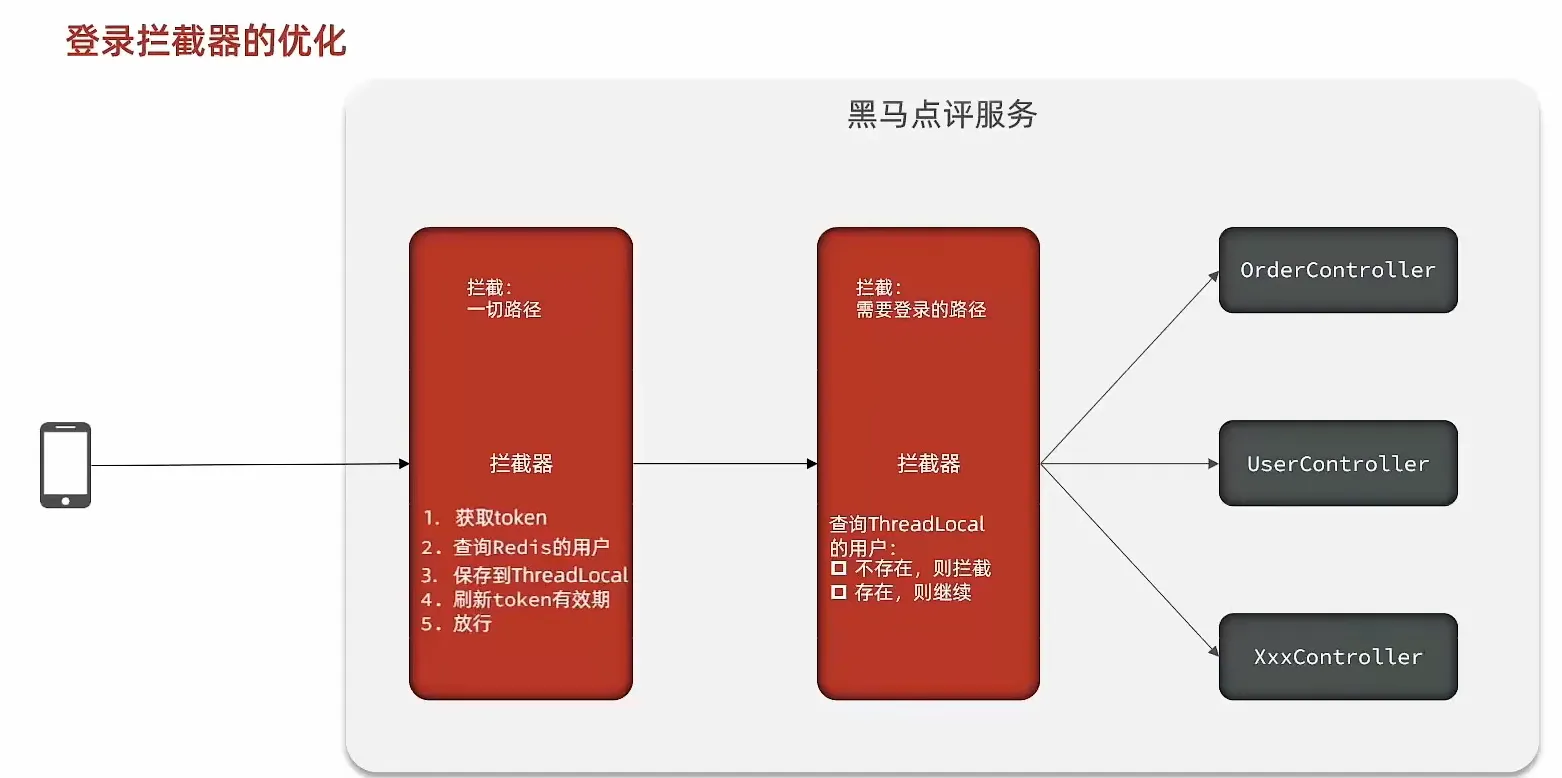
黑马程序员项目-黑马点评
黑马点评1 短信登录 基于Session实现登录流程 发送验证码: 用户在提交手机号后,会校验手机号是否合法,如果不合法,则要求用户重新输入手机号 如果手机号合法,后台此时生成对应的验证码,同时将验证码进行…...
)
ubuntu 20.04 + Anaconda + cuda-11.8 + opencv-4.8.0(cuda)
环境:一键编译opencv-4.8.0(cuda),前提是已经安装好了cuda和cudnn Anaconda安装 参考: https://blog.csdn.net/weixin_46947765/article/details/130980957 opencv4.8.0编译安装 一键编译shell脚本 VERSION4.8.0test -e ${VERSION}.zip || wget http…...

Linux 目录
目录 1. Linux 目录1.1. 目录 /usr/bin 和 /usr/local/bin 区别 1. Linux 目录 1.1. 目录 /usr/bin 和 /usr/local/bin 区别 /usr/bin 下面的都是系统预装的可执行程序, 系统升级有可能会被覆盖。/usr/local/bin 目录是给用户放置自己的可执行程序。...
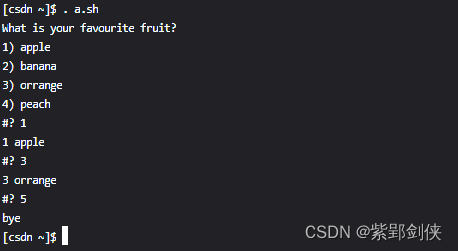
Linux shell编程学习笔记21:用select in循环语句打造菜单
一、select in循环语句的功能 Linux shell脚本编程提供了select in语句,这是 Shell 独有的一种循环语句,非常适合终端(Terminal)这样的交互场景,它可以根据用户的设置显示出带编号的菜单,用户通过输入不同…...
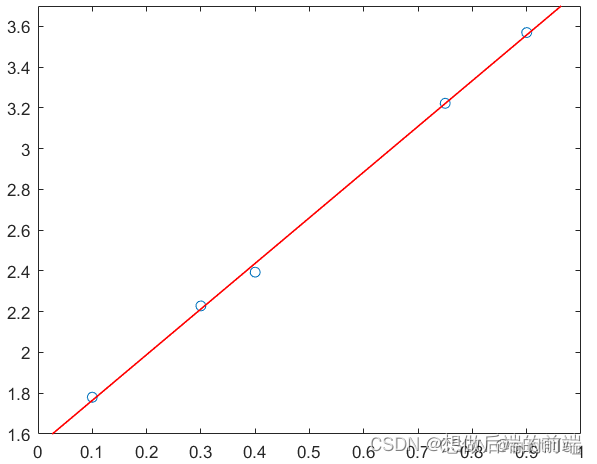
线性回归与线性拟合的原理、推导与算法实现
关于回归和拟合,从它们的求解过程以及结果来看,两者似乎没有太大差别,事实也的确如此。从本质上说,回归属于数理统计问题,研究解释变量与响应变量之间的关系以及相关性等问题。而拟合是把平面的一系列点,用…...

【C++】set和multiset
文章目录 关联式容器键值对一、set介绍二、set的使用multiset 关联式容器 STL中的部分容器,比如:vector、list、deque、forward_list(C11)等,这些容器统称为序列式容器,因为其底层为线性序列的数据结构,里面存储的是元…...

二十、泛型(1)
本章概要 基本概念 与 C 的比较 简单泛型 一个元组类库一个堆栈类RandomList 基本概念 普通的类和方法只能使用特定的类型:基本数据类型或类类型。如果编写的代码需要应用于多种类型,这种严苛的限制对代码的束缚就会很大。 多态是一种面向对象思想的泛…...

【Unity数据交互】游戏中常用到的Json序列化
ˊˊ 👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏࿱…...
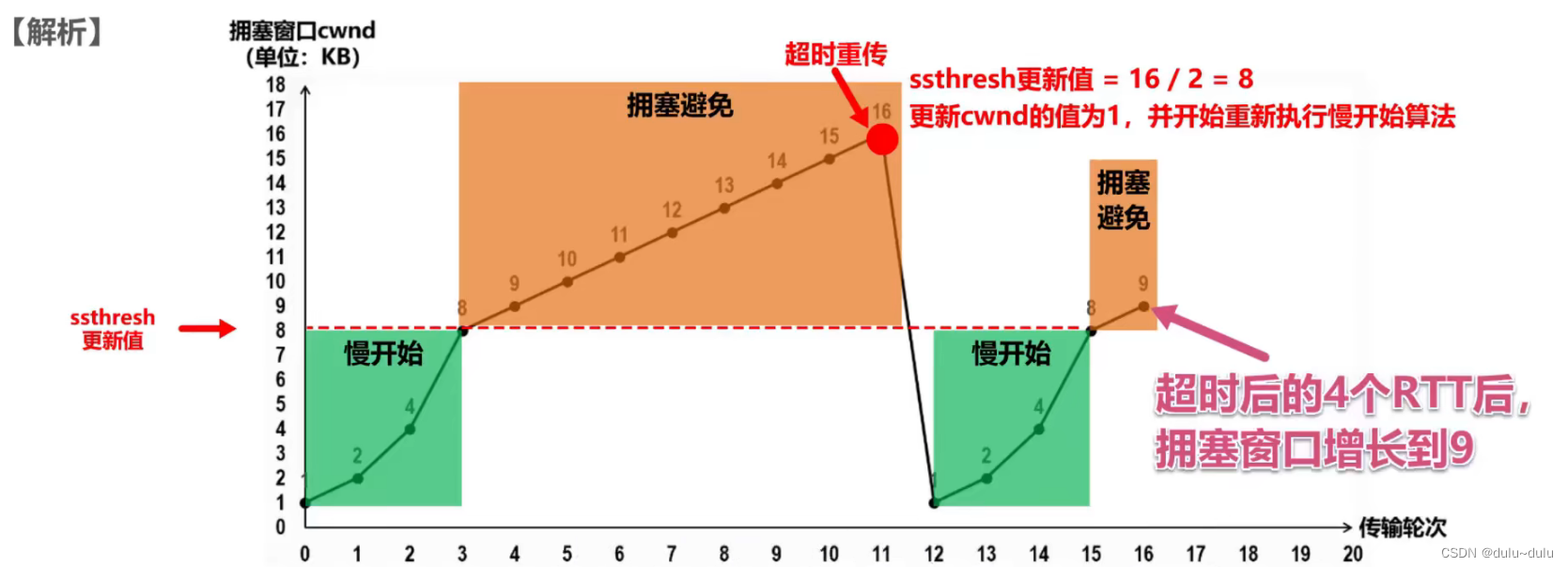
TCP的滑动窗口和拥塞控制
目录 滑动窗口 1.发送窗口和接收窗口 2.滑动窗口的分类 停止等待协议:发送窗口大小 1, 接收窗口大小 1 后退N帧协议(GBN):发送窗口大小 > 1,接收窗口大小 1 选择重传协议(SR…...

零信任网络:一种全新的网络安全架构
随着网络技术的不断发展,网络安全问题日益凸显。传统的网络安全策略往往基于信任和验证,但这种信任策略存在一定的局限性。为了解决这一问题,零信任网络作为一种全新的网络安全架构,逐渐受到人们的关注。本文将对零信任网络的概念…...
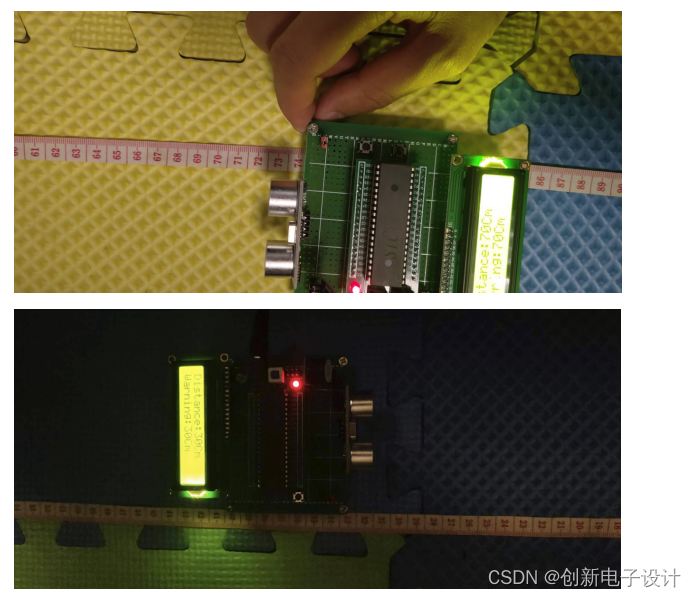
基于单片机的智能拐杖软件设计
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 技术交流认准下方 CSDN 官方提供的联系方式 文章目录 概要 一、整体设计方案2.1本设计设计原理2.1.1单片机基本介绍 二、本设计方案选择三、软件设计AD原理图:原理图…...

小程序如何设置自动预约快递
小程序通过设置自动预约功能,可以实现自动将订单信息发送给快递公司,快递公司可以自动上门取件。下面具体介绍如何设置。 在小程序管理员后台->配送设置处,选择首选配送公司。为了能够支持自动预约快递,请选择正常的快递公司&…...
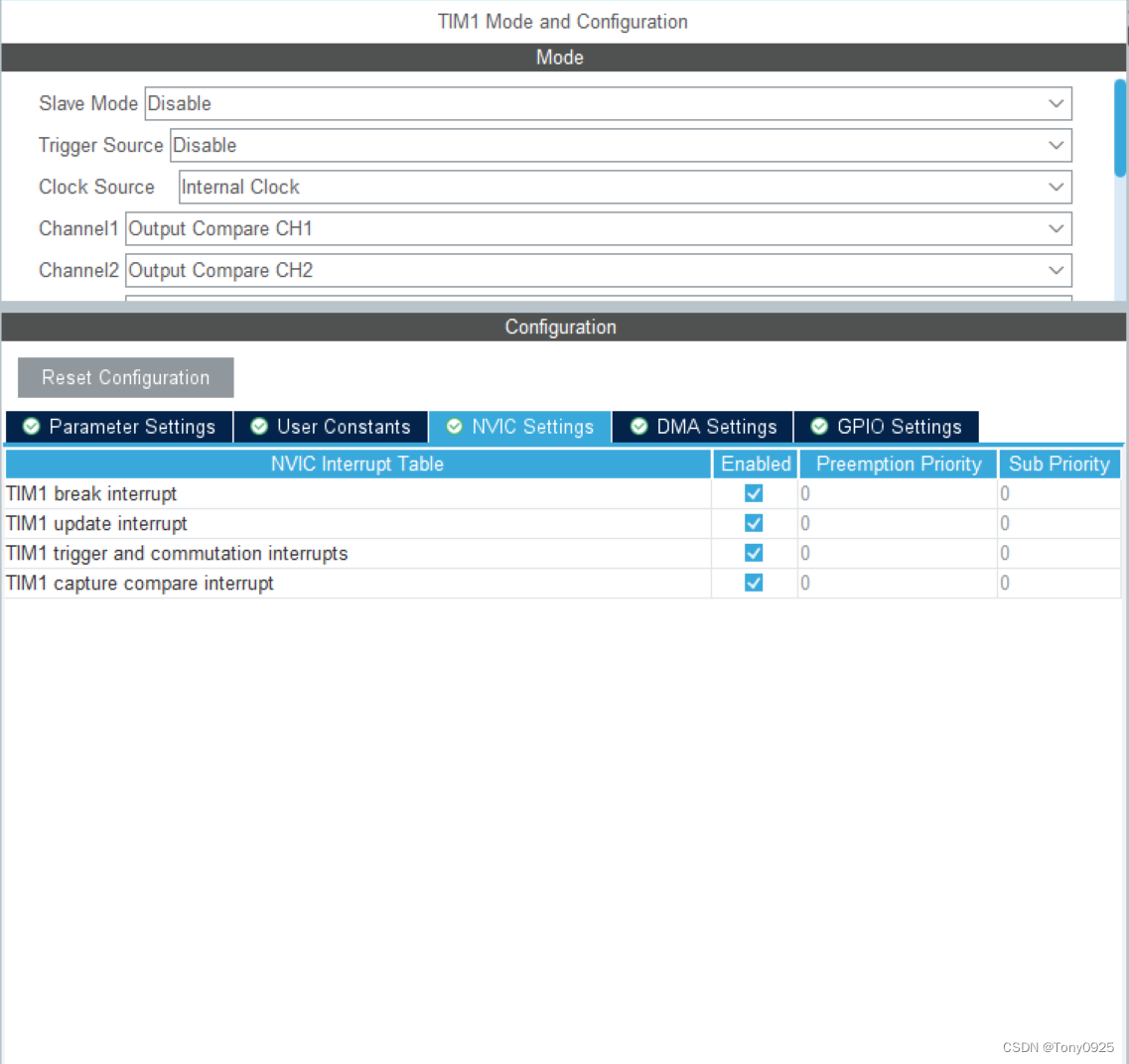
STM32-HAL库08-TIM的输出比较模式(输出PWM的另一种方式)
STM32-HAL库08-TIM的输出比较模式(输出PWM的另一种方式) 一、所用材料: STM32F103C6T6最小系统板 STM32CUBEMX(HAL库软件) MDK5 示波器或者逻辑分析仪 二、所学内容: 通过定时器TIM的输出比较模式得到预…...
【数据结构】深入浅出讲解计数排序【图文详解,搞懂计数排序这一篇就够了】
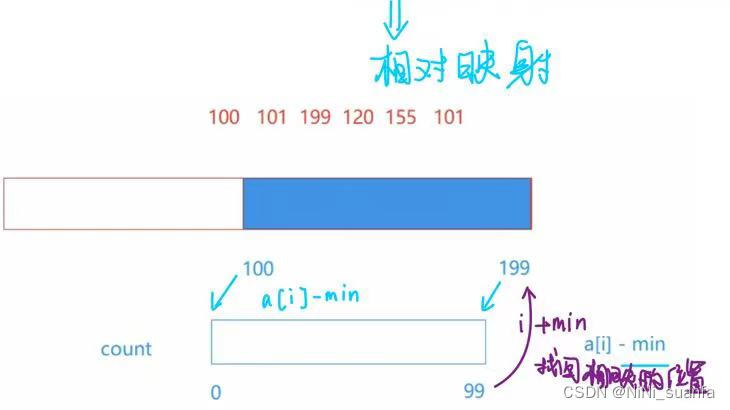
计数排序 前言一、计数排序算法核心思路映射 概念补充绝对映射相对映射 二、计数排序算法核心实现步骤三、码源详解四、效率分析(1)时间复杂度 — O(Max(N,range))(2)空间…...

Canvas制作喷泉效果示例
Canvas能制作出很多动画效果,下面是一个制作喷泉效果的示例 效果图 源代码 <!DOCTYPE html> <html> <head> <meta charset"utf-8"> <meta name"viewport" content"widthdevice-width, initial-scale1 ,user-…...
)
从‘黑窗口’到彩色世界:用GLUT快速实现你的第一个OpenGL图形程序(含完整代码解析)
从命令行到绚丽图形:GLUT快速入门OpenGL视觉编程 在计算机图形学的浩瀚海洋中,OpenGL无疑是最闪耀的灯塔之一。对于初学者而言,如何快速跨过复杂的配置和抽象的理论,直接看到图形输出的成果,是激发学习兴趣的关键。本文…...

华为云API调用实战:如何用Python脚本自动获取并刷新IAM用户Token?
华为云API自动化鉴权实战:Python实现Token动态管理与高可用方案 在云原生应用开发中,服务间API调用已成为现代系统架构的基石。华为云作为国内领先的云服务提供商,其API网关的鉴权机制直接关系到业务系统的稳定性和安全性。对于中高级开发者而…...

HCK代码实现原理:揭秘AI辅助学术分析的核心算法
HCK代码实现原理:揭秘AI辅助学术分析的核心算法 【免费下载链接】sala-do-futuro-script O HCK um script de anlise acadmica assistida por IA, projetado para auxiliar estudantes na resoluo de questes de tarefas e provas da plataforma sala do futuro. …...

MySQL新手必看:Navicat导入SQL文件报错1046?三步搞定数据库选择问题
MySQL图形化工具避坑指南:彻底解决1046报错与数据库选择问题 刚接触MySQL的开发者,十有八九会在第一次导入SQL文件时遇到那个令人困惑的弹窗——"Error Code: 1046. No database selected"。这个看似简单的提示背后,其实隐藏着MySQ…...

linux PATH介绍
这句命令的作用是:把君正 X2600 的交叉编译器目录,临时加入 Linux 的命令搜索路径里。 你这句: export PATH/home/vik/project/x2600/tools/toolchains/mips-xburst2-gcc720-glibc238/bin:$PATH可以拆开理解。1. PATH 是啥? PATH …...

Linux信号机制深度解析:从内核实现到多线程编程实践
1. 信号的角色与核心概念 信号,这个在Unix/Linux世界里存在了超过三十年的机制,至今仍然是进程间通信和内核与进程交互的基石。简单来说,信号就是内核发给进程的一个简短通知,告诉它“有事情发生了”。你可以把它想象成你手机上的…...
)
告别混乱!在C#/C++混合项目中用OpenCasCade 7.7.0搞定三维坐标显示(附完整代码)
工业级三维坐标可视化实战:OpenCasCade混合开发深度解析 第一次在CAD软件中看到那个小小的三色坐标轴时,我完全没意识到它背后隐藏着如此复杂的工程逻辑。直到自己动手在C#/C混合环境中实现OpenCasCade的坐标显示系统,才真正理解工业级三维可…...

Go语言内存优化:GC调优与内存池
Go语言内存优化:GC调优与内存池 1. GC调优 import "runtime/debug"func init() {debug.SetGCPercent(100) }2. sync.Pool var bufferPool sync.Pool{New: func() interface{} {return make([]byte, 4096)}, }func getBuffer() []byte {return bufferPool…...

【行业趋势】软件测试的第三次革命:从手工、自动化到AI Agent驱动
写在前面 如果你是一名测试工程师,大概率经历过这样的时刻:凌晨两点,被自动化回归失败的告警吵醒,爬起来一看,又是页面改了个按钮ID,三百条用例全红了。修了一小时定位器,天亮了。 如果你是一名…...

介绍一种免费使用小米 MiMo-V2.5-pro模型的方法
1. MiMo-V2.5-Pro是什么? MiMo-V2.5-Pro 是一个拥有 1.02 万亿参数的混合专家模型,其中包含 420 亿个激活参数,基于混合注意力架构构建,上下文窗口长度达 100 万 token。其通用智能体能力、复杂软件工程能力和长周期任务处理能力…...