多目标跟踪算法 实时检测 - opencv 深度学习 机器视觉 计算机竞赛
文章目录
- 0 前言
- 2 先上成果
- 3 多目标跟踪的两种方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟踪过程
- 4.1 存在的问题
- 4.2 基于轨迹预测的跟踪方式
- 5 训练代码
- 6 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 深度学习多目标跟踪 实时检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目标跟踪的两种方法
3.1 方法1
基于初始化帧的跟踪,在视频第一帧中选择你的目标,之后交给跟踪算法去实现目标的跟踪。这种方式基本上只能跟踪你第一帧选中的目标,如果后续帧中出现了新的物体目标,算法是跟踪不到的。这种方式的优点是速度相对较快。缺点很明显,不能跟踪新出现的目标。
3.2 方法2
基于目标检测的跟踪,在视频每帧中先检测出来所有感兴趣的目标物体,然后将其与前一帧中检测出来的目标进行关联来实现跟踪的效果。这种方式的优点是可以在整个视频中跟踪随时出现的新目标,当然这种方式要求你前提得有一个好的“目标检测”算法。
学长主要分享Option2的实现原理,也就是Tracking By Detecting的跟踪方式。
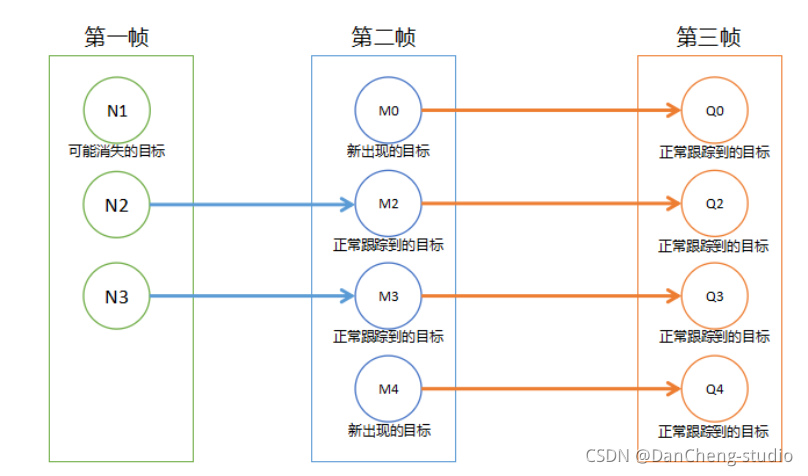
4 Tracking By Detecting的跟踪过程
**Step1:**使用目标检测算法将每帧中感兴趣的目标检测出来,得到对应的(位置坐标, 分类, 可信度),假设检测到的目标数量为M;
**Step2:**通过某种方式将Step1中的检测结果与上一帧中的检测目标(假设上一帧检测目标数量为N)一一关联起来。换句话说,就是在M*N个Pair中找出最像似的Pair。
对于Step2中的“某种方式”,其实有多种方式可以实现目标的关联,比如常见的计算两帧中两个目标之间的欧几里得距离(平面两点之间的直线距离),距离最短就认为是同一个目标,然后通过匈牙利算法找出最匹配的Pair。当让,你还可以加上其他的判断条件,比如我用到的IOU,计算两个目标Box(位置大小方框)的交并比,该值越接近1就代表是同一个目标。还有其他的比如判断两个目标的外观是否相似,这就需要用到一种外观模型去做比较了,可能耗时更长。
在关联的过程中,会出现三种情况:
1)在上一帧中的N个目标中找到了本次检测到的目标,说明正常跟踪到了;
2)在上一帧中的N个目标中没有找到本次检测到的目标,说明这个目标是这一帧中新出现的,所以我们需要把它记录下来,用于下下一次的跟踪关联;
3)在上一帧中存在某个目标,这一帧中并没有与之关联的目标,那么说明该目标可能从视野中消失了,我们需要将其移除。(注意这里的可能,因为有可能由于检测误差,在这一帧中该目标并没有被检测到)
4.1 存在的问题
上面提到的跟踪方法在正常情况下都能够很好的工作,但是如果视频中目标运动得很快,前后两帧中同一个目标运动的距离很远,那么这种跟踪方式就会出现问题。
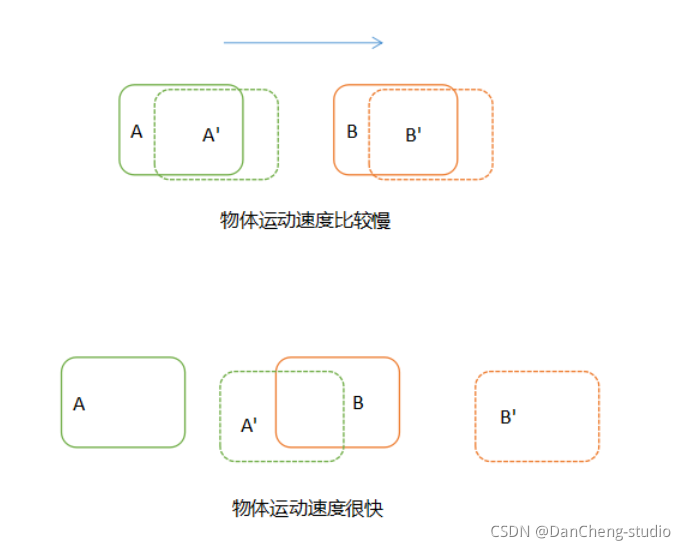
如上图,实线框表示目标在第一帧的位置,虚线框表示目标在第二帧的位置。当目标运行速度比较慢的时候,通过之前的跟踪方式可以很准确的关联(A, A’)和(B,
B’)。但是当目标运行速度很快(或者隔帧检测)时,在第二帧中,A就会运动到第一帧中B的位置,而B则运动到其他位置。这个时候使用上面的关联方法就会得到错误的结果。
那么怎样才能更加准确地进行跟踪呢?
4.2 基于轨迹预测的跟踪方式
既然通过第二帧的位置与第一帧的位置进行对比关联会出现误差,那么我们可以想办法在对比之前,先预测目标的下一帧会出现的位置,然后与该预测的位置来进行对比关联。这样的话,只要预测足够精确,那么几乎不会出现前面提到的由于速度太快而存在的误差
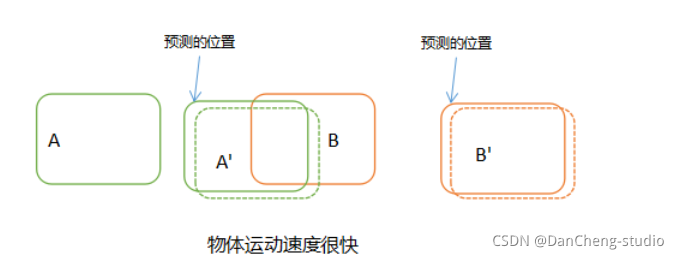
如上图,我们在对比关联之前,先预测出A和B在下一帧中的位置,然后再使用实际的检测位置与预测的位置进行对比关联,可以完美地解决上面提到的问题。理论上,不管目标速度多么快,都能关联上。那么问题来了,怎么预测目标在下一帧的位置?
方法有很多,可以使用卡尔曼滤波来根据目标前面几帧的轨迹来预测它下一帧的位置,还可以使用自己拟合出来的函数来预测下一帧的位置。实际过程中,我是使用拟合函数来预测目标在下一帧中的位置。
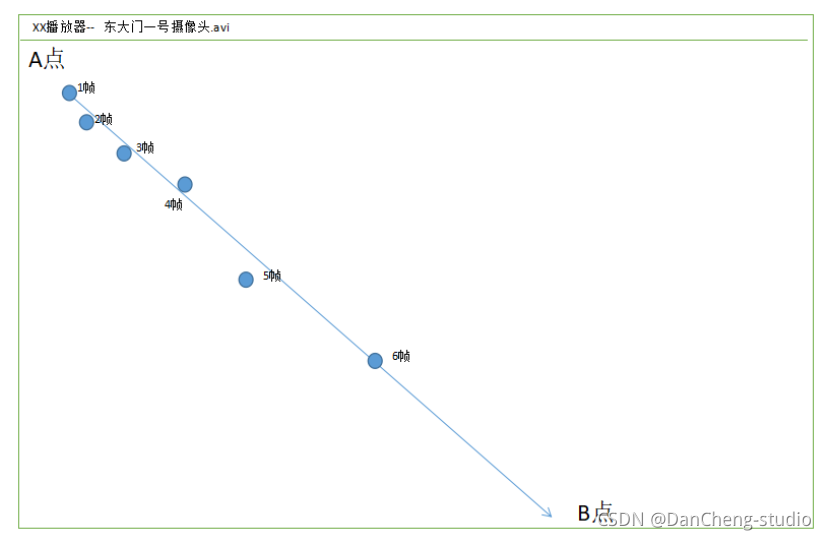
如上图,通过前面6帧的位置,我可以拟合出来一条(T->XY)的曲线(注意不是图中的直线),然后预测目标在T+1帧的位置。具体实现很简单,Python中的numpy库中有类似功能的方法。
5 训练代码
这里记录一下训练代码,来日更新
if FLAGS.mode == ‘eager_tf’:
# Eager mode is great for debugging
# Non eager graph mode is recommended for real training
avg_loss = tf.keras.metrics.Mean(‘loss’, dtype=tf.float32)
avg_val_loss = tf.keras.metrics.Mean(‘val_loss’, dtype=tf.float32)
for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
多目标跟踪算法 实时检测 - opencv 深度学习 机器视觉 计算机竞赛
文章目录 0 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习多目标跟踪 …...

深入了解Jedis:Java操作Redis的常见类型数据存储
目录 前言 一、Jedis介绍 1.Jedis在各方面的功能 2.特点 二、Java连接Redis 1.导入pom依赖 2.建立连接 三、Java操作Redis的常见类型数据存储 1.字符串 2.哈希表 3.列表 4.集合 5.有序集合 四、Redis的实际应用场景实例 1.会议信息实体 2.自定义注解 3.创建切面…...

angular+ionic+npm项目运行
angularionicnpm项目运行 错误记录(1)Downloading binary from https://github.com/sass/node-sass/releases/download/v4.14.1/win32-x64-72_binding.node(2)The npm warning "A requires a peer of B but none is installe…...

【数据库】数据库模式 Schema
数据库模式 Schema 1.MySQL2.PostgreSQL3.SQL Server4.Oracle5.SQLite 在数据库的术语中,模式(schema)是一个逻辑概念,用于组织数据库中的对象。模式中的对象通常包括 表、索引、数据类型、序列、视图、存储过程、主键、外键 等等…...
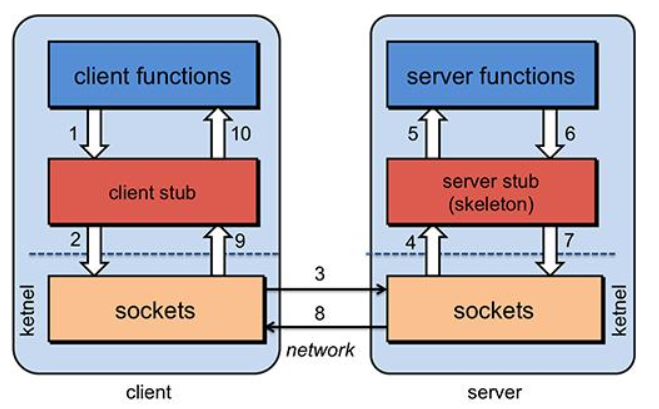
RPC 原理详解
文章目录 什么是 RPCRPC 基本原理RPC核心功能服务寻址数据编解码网络传输一次RPC的调用过程 实践基于HTTP协议的RPC基于TCP协议的RPC 什么是 RPC RPC(Remote Procedure Call),即远程过程调用,它允许像调用本地服务一样调用远程服…...

新版Helix QAC 100%覆盖MISRA C++:2023
Helix QAC 2023.3预期将100%覆盖在2023年第四季度发布的新的MISRA C:2023规则。 此外,该版本支持更多的C20语言特性,并改进了Perforce Validate平台和Helix QAC与Validate的集成,以及其他质量改进。 编码标准覆盖率(MISRA C:202…...

maven 项目添加 git-hook 脚本,约束提交内容格式
git 提交代码,推送代码,可以通过在 .git/hooks 目录中的 bash 脚本来做一定的验证工作。 本例使用插件 maven-antrun-plugin 自动输出脚本至 .git/hooks 目录中,在 pom.xml 中的使用示例如下: <plugin><groupId>org.…...

18、Flink的SQL 支持的操作和语法
Flink 系列文章 1、Flink 部署、概念介绍、source、transformation、sink使用示例、四大基石介绍和示例等系列综合文章链接 13、Flink 的table api与sql的基本概念、通用api介绍及入门示例 14、Flink 的table api与sql之数据类型: 内置数据类型以及它们的属性 15、Flink 的ta…...
泛微OA_lang2sql 任意文件上传漏洞复现
简介 泛微OA E-mobile系统 lang2sql接口存在任意文件上传漏洞,由于后端源码中没有对文件没有校验,导致任意文件上传。攻击者可利用该参数构造恶意数据包进行上传漏洞攻击。 漏洞复现 FOFA语法: title"移动管理平台-企业管理" 页…...
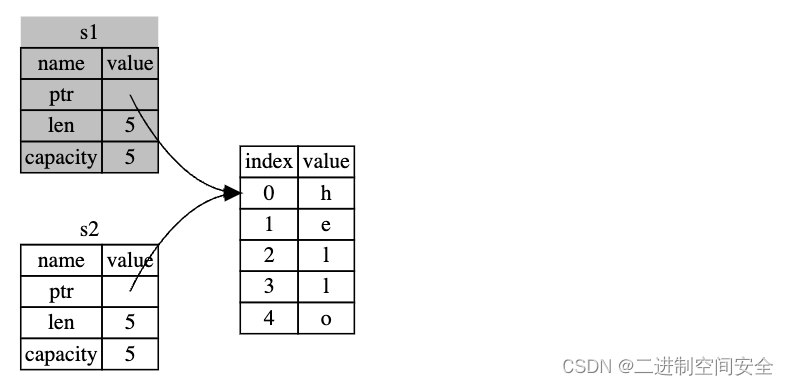
Rust编程基础核心之所有权(上)
1.什么是所有权? Rust 的核心功能(之一)是 所有权(ownership)。虽然该功能很容易解释,但它对语言的其他部分有着深刻的影响。 所有程序都必须管理其运行时使用计算机内存的方式。一些语言中具有垃圾回收机制&#x…...

优化改进YOLOv5算法之添加DCNv3模块,有效提升目标检测效果
目录 前言 1 DCNv3原理 1.1 DCNv2 1.2 DCNv3 1.3 模型架构 2 YOLOv5算法中加入DCNv3模块...

VSCode 连接不上 debian 的问题
之前一台笔记本上安装了 debian12,当时用 vscode 是可以连接上的,但今天连接突然就失败了,失败信息是这样的: 查看失败信息 因为 debian 是自动获取 ip 地址的,以前能连接上时,ip 地址是 104,然…...
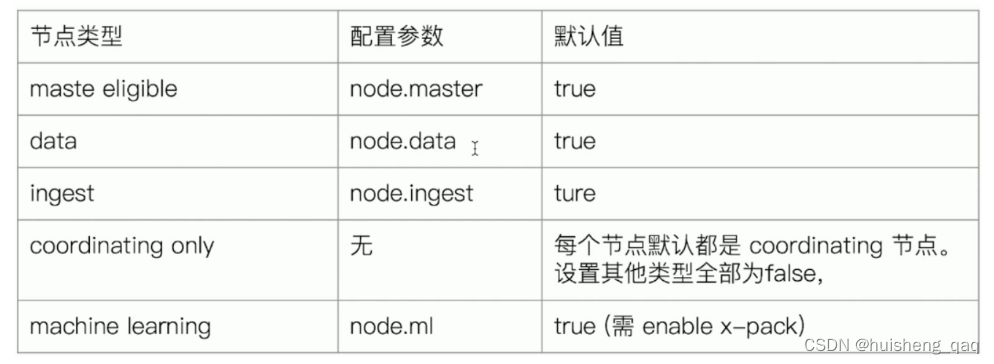
【ElasticSearch系列-06】Es集群架构的搭建以及集群的核心概念
ElasticSearch系列整体栏目 内容链接地址【一】ElasticSearch下载和安装https://zhenghuisheng.blog.csdn.net/article/details/129260827【二】ElasticSearch概念和基本操作https://blog.csdn.net/zhenghuishengq/article/details/134121631【三】ElasticSearch的高级查询Quer…...

软考高级系统架构设计师系列案例考点专题六:面向服务架构设计
软考高级系统架构设计师系列案例考点专题六:面向服务架构设计 一、面向服务架构设计内容大纲二、SOA概述和发展三、SOA和微服务的区别四、SOA的参考架构五、SOA主要协议和规范六、SOA设计标准和原则七、SOA设计模式八、SOA构建和实施一、面向服务架构设计内容大纲 SOA概述和发…...

【入门Flink】- 07Flink DataStream API【万字篇】
DataStream API 是 Flink 的核心层 API。一个 Flink 程序,其实就是对DataStream的各种转换。 代码基本上都由以下几部分构成: 执行环境(Execution Environment) 1)创建执行环境StreamExecutionEnvironment StreamExe…...

AI:55-基于深度学习的人流量检测
🚀 本文选自专栏:AI领域专栏 从基础到实践,深入了解算法、案例和最新趋势。无论你是初学者还是经验丰富的数据科学家,通过案例和项目实践,掌握核心概念和实用技能。每篇案例都包含代码实例,详细讲解供大家学习。 📌📌📌在这个漫长的过程,中途遇到了不少问题,但是…...

node版本管理工具nvm
node版本管理工具nvm 要在本地拥有多个 Node.js 版本,并根据不同的环境切换不同的 Node.js 版本,你可以使用工具如 nvm(Node Version Manager)来管理和切换 Node.js 版本。 以下是关于如何使用这两个工具的简要说明:…...
stable-diffusion-webui安装Wav2Lip
常见错误 1.错误:Torch is not able to use GPU; add --skip-torch-cuda-test to COMMANDLINE_ARGS variable to disable this check 修改代码: launch_utils.py 删除三个地方:...
Nacos-2.2.2源码修改集成高斯数据库GaussDB,postresql
一 ,下载代码 Release 2.2.2 (Apr 11, 2023) alibaba/nacos GitHub 二, 执行打包 mvn -Prelease-nacos -Dmaven.test.skiptrue -Drat.skiptrue clean install -U 或 mvn -Prelease-nacos ‘-Dmaven.test.skiptrue’ ‘-Drat.skiptrue’ clean instal…...

Linux 内核中根据文件inode号获取其对应的struct inode
文章目录 前言一、简介二、iget_locked2.1 简介2.2 内核中使用2.3 LKM demo 三、ext4_iget3.1 简介3.2 LKM demo 前言 文件inode号和struct inode结构体请参考: Linux文件路径,目录项,inode号关联 Linux文件系统 struct inode 结构体解析 一…...

【2026最新】应对Turnitin查重:实测5大英文查降AI宝藏工具,一站式搞定初稿
现在的英文初稿,无论是期刊文章、SCI 还是普通的 Course Essay,基本都需要评估内容的原创度,进行文章 AI 率检测。很多伙伴以为纯手敲就能过,结果一查数据依然不尽如人意。 针对英文内容,咱们必须使用专门的英文检测和…...

服务器日志分析实战:用Python追踪HTTP 404错误并可视化异常频率
作为一名爬虫开发者或网站运维人员,服务器日志就像飞机的“黑匣子”——它记录了每个请求的来龙去脉。而404错误(页面未找到)尤其值得关注:它可能是用户输错了网址,可能是你爬虫的URL构造逻辑有漏洞,也可能是网站改版后旧的链接失效了。更严重的是,大量突然涌出的404请求…...

组态王通用扫码枪配置
使用组态王扫码枪驱动,是绑定变量,扫码后直接就可以显示扫码内容。解决每次扫码输入数据时必须先用鼠标点进输入框内的问题。驱动安装先添加驱动,亚控网站的文件为 barcodescanner,这个文件是组态王通用扫码枪的驱动,但…...

AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了
AI开始替人办事后,最危险的不是模型不够强,而是它把旧资料当真了2026年真正值得重视的AI底层能力,是让模型知道该信谁 你有没有发现一个很扎心的变化。 以前我们用AI,最怕它不会。 现在我们用AI,最怕它太会了。 它能写…...

荣耀出征官方网站下载正版手游 翅膀养成细节玩法全方位讲解
玩荣耀出征的玩家都清楚,翅膀不仅是角色的颜值象征,更是提升整体战力的核心途径。很多新手玩家只顾着升级、刷装备,完全忽略翅膀养成,导致等级很高但战力始终上不去。还有不少玩家胡乱合成、盲目进阶,浪费了大量稀有翅…...

基于Netburner NANO54415构建工业级嵌入式Web服务器:从硬件选型到广域监控实战
1. 项目概述:一个为广域与本地监控而生的嵌入式Web服务器如果你正在寻找一个能部署在野外、工厂角落或者任何需要远程数据采集与控制场景下的嵌入式Web服务器方案,并且对市面上那些要么性能孱弱、要么开发门槛极高的开发板感到厌倦,那么这个基…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...

第2章 谁在危险中——被AI替代的五类程序员
第2章 谁在危险中——被AI替代的五类程序员 核心问题:哪些程序员最容易被AI替代?背后的原因是什么? 2.1 问题定义:一场正在发生的结构性塌陷 2.1.1 数据不会说谎 2026年1月12日,Ravio发布了一份让整个科技圈沉默的报告:过去一年,初级开发者岗位招聘量暴跌73%。 不是…...

智能烹饪助手:基于传感器融合与AI的厨房自动化实践
1. 项目概述:一个让厨房小白也能自信下厨的智能伙伴每次站在灶台前,你是不是也经历过这样的场景:一边手忙脚乱地翻着菜谱,一边担心锅里的菜是不是快糊了,还要分心去计算各种调料该放多少?对于很多刚接触烹饪…...

Win11Debloat:Windows系统精简与隐私保护的专业解决方案
Win11Debloat:Windows系统精简与隐私保护的专业解决方案 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter and …...