基于卷积优化算法的无人机航迹规划-附代码
基于卷积优化算法的无人机航迹规划
文章目录
- 基于卷积优化算法的无人机航迹规划
- 1.卷积优化搜索算法
- 2.无人机飞行环境建模
- 3.无人机航迹规划建模
- 4.实验结果
- 4.1地图创建
- 4.2 航迹规划
- 5.参考文献
- 6.Matlab代码
摘要:本文主要介绍利用卷积优化算法来优化无人机航迹规划。
1.卷积优化搜索算法
卷积优化算法原理请参考:https://blog.csdn.net/u011835903/article/details/130000907
2.无人机飞行环境建模
? 环境模型的建立是考验无人机是否可以圆满完成人类所赋予各项任务的基
础和前提,其中第一步便是如何描述规划空间中的障碍物。首先我们将采取函数模拟法模拟地貌特征。其函数表达式为:
z ( x , y ) = s i n ( y + a ) + b s i n ( x ) + c c o s ( d y 2 + x 2 ) + e c o s ( y ) + f s i n ( f y 2 + x 2 ) + g c o s ( y ) (1) z(x,y)=sin(y+a)+bsin(x)+ccos(d\sqrt{y^2+x^2})+ecos(y)+fsin(f\sqrt{y^2+x^2})+gcos(y)\tag{1} z(x,y)=sin(y+a)+bsin(x)+ccos(dy2+x2)+ecos(y)+fsin(fy2+x2)+gcos(y)(1)
其中, ( x , y ) (x, y) (x,y) 为地形上某点投影在水平面上的点坐标, z z z 则为对应点坐标的高度。式中 a , b , c , d , e , f , g a, b, c, d, e, f , g a,b,c,d,e,f,g 是常系数,想要得到不同的地貌特征可以通过改变其常系数的大小,以上建模是作为环境模型的基准地形信息。但为了得到障碍区域我们还需要在这个基准地形上叠加山峰模型,这样就可以模拟像山峰、丘陵等障碍地理信息。山峰模型的数学表达式为:
h ( x , y ) = ∑ i h i e x p [ − ( x − x o i ) 2 a i 2 − ( y − y o i ) 2 b i 2 ] + h o (2) h(x,y)=\sum_ih_iexp[-\frac{(x-x_{oi})^2}{a_i^2}-\frac{(y-y_{oi})^2}{b_i^2}]+h_o \tag{2} h(x,y)=i∑hiexp[−ai2(x−xoi)2−bi2(y−yoi)2]+ho(2)
式 (2)中, h o h_o ho 和 h i h_i hi 分别表示基准地形和第 i i i座山峰的高度, ( x o i , y o i ) (xoi , y oi ) (xoi,yoi)则表示第 i座山峰的中心坐标位置,a i 和 b i 分别是第 i 座山峰沿 x 轴和 y 轴方向的坡度。由式(1)和(2),我们可以得到如下表达式:
Z ( x , y ) = m a x [ z ( x , y ) , h ( x , y ) ] (3) Z(x,y)=max[z(x,y),h(x,y)]\tag{3} Z(x,y)=max[z(x,y),h(x,y)](3)
无人机在躲避障碍物的同时也会经常遇到具有威胁飞行安全的区域,我们称之为威胁区域。这些威胁区域可以是敌人的雷达和防空导弹系统的探测威胁区域也可以是一些其它的威胁,一旦无人机进入这些区域很有可能会被击落或者坠毁。为了简化模型,本文采用半径为 r 的圆柱形区域表示威胁区域,其半径的大小决定威胁区域的覆盖范围。每一个圆柱体的中心位置是对无人机构成最大威胁的地方并向外依次减弱。
3.无人机航迹规划建模
? 在环境建模的基础上,无人机航迹规划需要考虑到在执行复杂任务的过程中自身性能约束要求,合理的设计航迹评价函数才能使得卷积优化搜索算法得出的最后结果符合要求,并保证规划出的航迹是有效的。考虑到实际环境中,无人机需要不断适应变化的环境。所以在无人机路径规划过程中,最优路径会显得比较复杂,并包含许多不同的特征。基于实际的情况,本文采用较为复杂的航迹评价函数进行无人机路径规划。影响无人机性能的指标主要包括航迹长度、飞行高度、最小步长、转角代价、最大爬升角等。
? 搜索最佳路径通常与搜索最短路径是密不可分的。在无人机航迹规划过程中,航迹的长度对于大多数航迹规划任务来说也是非常重要的。众所周知,较短的路线可以节省更多的燃料和更多的时间并且发现未知威胁的几率会更低。我们一般把路径定义为无人机从起始点到终点所飞行路程的值,设一条完整的航线有 n n n个节点,其中第 i i i个航路点和第 i + 1 i+1 i+1个航路点之间的距离表示为 l i l_i li ,这两个航路点的坐标分别表示为 ( x i , y i , z i ) (x_i,y_i,z_i ) (xi,yi,zi), ( x i + 1 , y i + 1 , z i + 1 ) (x_{i+1}, y_{i+1},z_{i+1}) (xi+1,yi+1,zi+1)并分别记作 g ( i ) g(i) g(i)和 g ( i + 1 ) g(i+1) g(i+1)。航迹需要满足如下条件:
{ l i = ∣ ∣ g ( i + 1 ) − g ( i ) ∣ ∣ 2 L p a t h = ∑ i = 1 n − 1 l i (4) \begin{cases} l_i = ||g(i+1)-g(i)||_2\\ L_{path}=\sum_{i=1}^{n-1}l_i \end{cases}\tag{4} {li=∣∣g(i+1)−g(i)∣∣2Lpath=∑i=1n−1li(4)
在飞行的过程中会遇到障碍物或者进入威胁区域,如果无人机无法躲避障碍物或者飞入了威胁区域将面临被击落或坠毁的危险以至于无法到达终点,记为 L p a t h = ∞ L_{path}=\infty Lpath=∞,但是无穷函数在实际问题中很难表示,我们采用惩罚的方式进行处理。一般情况下,为了利用地形覆盖自身位置,无人机应尽可能降低高度这可以帮助自身避免一些未知雷达等威胁。但是太低的飞行高度同样会加大无人机同山体和地面的撞击几率,因此设定稳定的飞行高度是非常重要的。飞行高度不应该有太大的变化,稳定的飞行高度可以减少控制系统的负担,节省更多的燃料 。为了使无人机飞行更加安全,给出的飞行高度模型:
{ h h e i g h t = 1 n ∑ i = 0 n − 1 ( z ( i ) − z ‾ ) 2 z ‾ = 1 n ∑ i = 0 n − 1 z ( i ) (5) \begin{cases} h_{height}=\sqrt{\frac{1}{n}\sum_{i=0}^{n-1}(z(i)-\overline{z})^2}\\ \overline{z}=\frac{1}{n}\sum_{i=0}^{n-1}z(i) \end{cases}\tag{5} {hheight=n1∑i=0n−1(z(i)−z)2z=n1∑i=0n−1z(i)(5)
无人机的可操作性也受到其转角代价函数的限制。,在飞行过程中无人机的转角应不大于其预先设定的最大转角,转角的大小会影响其飞行的稳定性。本文的研究中,设定最大转角为 Φ Φ Φ,当前转角为 θ \theta θ并且 a i a_i ai是第 i i i段航路段向量。
{ c o s θ = a i T a i + 1 ∣ a i ∣ ∣ a i + 1 ∣ J t u r n = ∑ i = 1 n ( c o s ( Φ − c o s θ ) ) (6) \begin{cases} cos\theta =\frac{a_i^Ta_{i+1}}{|a_i||a_{i+1}|}\\ J_{turn}=\sum_{i=1}^n(cos(\Phi-cos\theta)) \end{cases}\tag{6} {cosθ=∣ai∣∣ai+1∣aiTai+1Jturn=∑i=1n(cos(Φ−cosθ))(6)
其中, ∣ a ∣ |a| ∣a∣代表矢量 a a a的长度。
? 通过对以上三个方面建立了无人机航迹规划的代价函数,可以得出本文的航迹评价函数如下:
J c o s t = w 1 L p a t h + w 2 h h e i g h t + w 3 J t u r n (7) J_{cost}=w_1L_{path}+w_2h_{height}+w_3J_{turn} \tag{7} Jcost=w1Lpath+w2hheight+w3Jturn(7)
其中, J c o s t J_{cost} Jcost是总的代价函数,参数 w i w_i wi , i = 1 , 2 , 3 i=1,2,3 i=1,2,3 表示每个代价函数的权值,且满足如下条件:
{ w i ≥ 0 ∑ i = 1 3 w i = 1 (8) \begin{cases} w_i\geq0 \\ \sum_{i=1}^3 w_i=1 \end{cases} \tag{8} {wi≥0∑i=13wi=1(8)
通过对总的代价函数进行有效地处理,我们可以得到由线段组成的航迹。不可否认的是得到的路径往往是仅在理论上可行,但为了实际可飞,有必要对航迹进行平滑处理。本文采用三次样条插值的方法对路径进行平滑。
4.实验结果
4.1地图创建
设置地图参数a, b, c, d, e, f , g=1。地图大小为:200*200。设置三个山峰,山峰信息如表1所示。威胁区域信息如表2所示
| 信息 | 山峰中心坐标 | 山峰高度 | 山峰X方向坡度 | 山峰y方向坡度 |
|---|---|---|---|---|
| 山峰1 | [60,60] | 50 | 20 | 20 |
| 山峰2 | [100,100] | 60 | 30 | 30 |
| 山峰3 | [150,150] | 80 | 20 | 20 |
| 信息 | 威胁区域中心坐标 | 威胁区域半径 |
|---|---|---|
| 威胁区域1 | [150,50] | 30 |
| 威胁区域2 | [50,150] | 20 |
创建的地图如下:

4.2 航迹规划
设置起点坐标为[0,0,20],终点坐标为[200,200,20]。利用卷积优化算法对航迹评价函数式(7)进行优化。优化结果如下:


从结果来看,卷积优化算法规划出了一条比较好的路径,表明算法具有一定的优势。
5.参考文献
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.DOI:10.27012/d.cnki.gdhuu.2020.000178.
6.Matlab代码
相关文章:
基于卷积优化算法的无人机航迹规划-附代码
基于卷积优化算法的无人机航迹规划 文章目录 基于卷积优化算法的无人机航迹规划1.卷积优化搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用卷积优化算法来优化无人机航迹规划。 …...

科技云报道:不卷自研大模型,金山办公如何创新生成式AI?
科技云报道原创。 过去大半年里,很多人对大模型的前景寄予厚望。主流观点认为,每个行业、每款产品都可以通过大模型“重做一遍”。 “重做一遍”听起来想象空间很大,但实际上多数大模型产品需要漫长的训练周期和海量资源投入,落…...

3BHE022291R0101 PCD230A 专注于制造卓越人工智能
3BHE022291R0101 PCD230A 专注于制造卓越人工智能 BISTelligence是BISTel的一个分支,BISTel是为全球半导体和FPD制造商提供工程和软件自动化产品的领先供应商。半导体产品集团上个月被卖给了新思科技。在出售给Synopsys之后,Bisetlliegnce成立了两个部门…...

小程序 scroll-view 性能问题
先说使用场景,一次加载很多数据造成小程序卡顿的问题 ,找了好多都没有好的解决办法,要么太过复杂,然后研究了两天通过简单的办法实现,先根据数量把高度撑开,然后根据滚动位置渲染指定的数据就可以了&#x…...
【移远QuecPython】EC800M物联网开发板的硬件PWM和PWM输出BUG
【移远QuecPython】EC800M物联网开发板的硬件PWM和PWM输出BUG 文章目录 导入库初始化PWM开启PWMPWM硬件BUG硬件BUG复现原因附录:列表的赋值类型和py打包列表赋值BUG复现代码改进优化总结 py打包 导入库 from misc import PWM_V2或者 from misc import PWM但我觉得…...

OverDraw的优化
在uwa搜寻到的一些overDraw优化方法 透明图片避免绘制来减少overDraw 像一些alpha0的图片,根本没有必要参与绘制。所以留一些可以参与Raycast,但是不绘制 using UnityEngine; using System.Collections;namespace UnityEngine.UI {public class Empty…...

数据结构—字符串
文章目录 7.字符串(1).字符串及其ADT#1.基本概念#2.ADT (2).字符串的基本操作#1.求子串substr#2.插入字符串insert#3.其他操作 (3).字符串的模式匹配#1.简单匹配(Brute-Force方法)#2.KMP算法I.kmp_match()II.getNext() #3.还有更多 小结附录:我自己写的string 7.字符…...

inne所属公司抢注“童年时光”商标仍被冻结
根据中国商标网查询,国家知识产权局已于2023年3月10日裁定,被告inne所属的南京童年时光生物技术有限公司注册的“童年时光”商标无效。随着这起保健品行业品牌资产争夺事件的发酵,更多的细节得到披露,至此,一个从“代理…...

20231106-前端学习加载和视频球特效
加载效果 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>加载效果</title><!-- 最新…...

Arrays.asList() 和 List.of() 的列表之争
1. 概述 有时在Java中,为了方便,我们需要创建一个小列表或将数组转换为列表。Java 为此提供了一些辅助方法。 在本文中,我们将比较初始化小型临时数组的两种主要方法:List.of()和 Array.asList()。 2. Arrays.asList() Java 自…...
基于51单片机的停车场管理系统仿真电路设计
**单片机设计介绍,基于51单片机的停车场管理系统仿真电路设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 停车场管理系统仿真电路设计介绍 停车场管理系统主要用于自动化管理和控制停车场,以提高停车…...

APIView单一资源的查看更新删除
APIView单一资源的查看更新删除 一、构建路由 re_path("author/(/d)",AuthorDetailView.as_view)), 二、视图类 在views.py中添加AuthorDetailView类 class AuthorDetailView(APIView):def get(self, request, pk):author Author.objects.get(pkpk)serializer A…...

UML--类图的表示
1. 类的表示 1.1 访问属性 : public -: private #: protected 1.2 接口与抽象类 斜体 表示抽象类和抽象方法 <<Interface>> 类表示接口 1.3 类图示意 Mclass- val: int getVal(): int 2. 类关系 2.1 实现关系 空心三角形和虚线组成 B实现A,则三角形尖尖朝…...
JVM字节码文件浅谈
文章目录 版权声明java虚拟机的组成字节码文件打开字节码文件的姿势字节码文件的组成魔数(基本信息)主副版本号(基本信息)主版本号不兼容的错误解决方法基本信息常量池方法 字节码文件的常用工具javap -v命令jclasslib插件阿里art…...
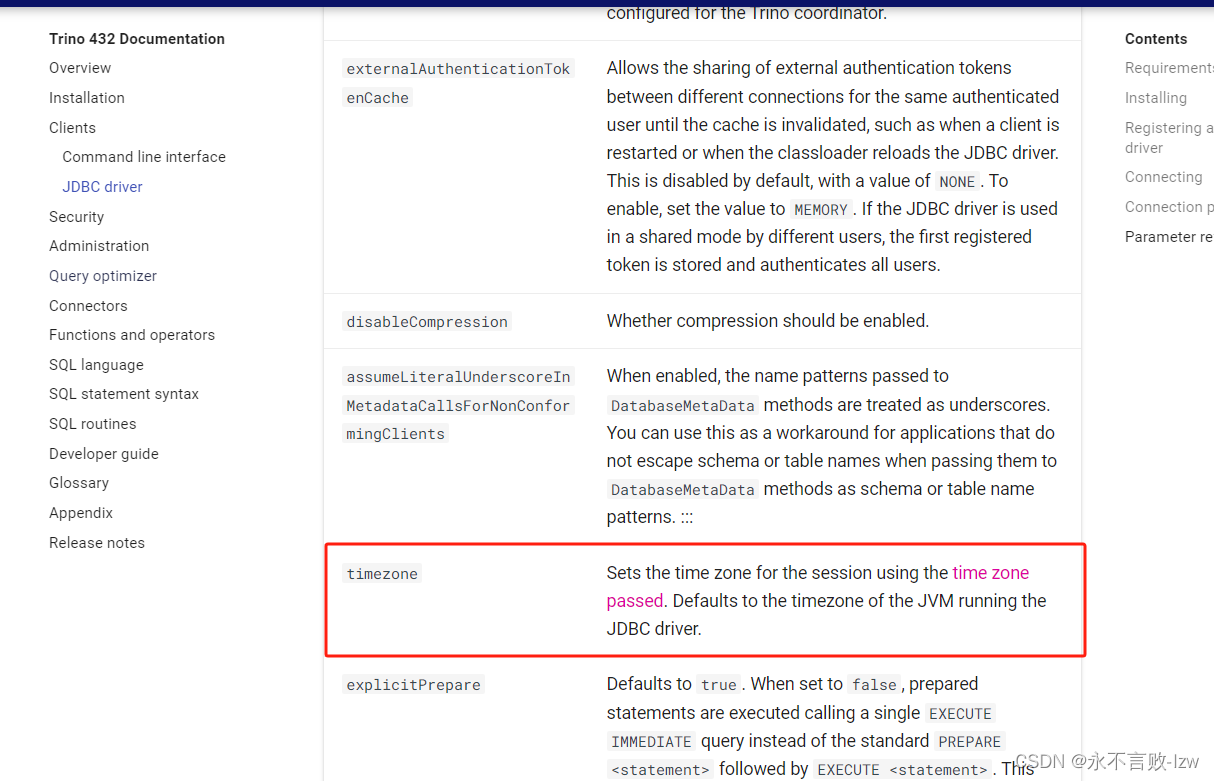
DBever 连接trino时区问题 The datetime zone id ‘GMT+08:00‘ is not recognised
DBever连接trino 测试连接成功,但是执行sql报时区不对、如果你默认使用的是大于jdk8的版本 会存在这个问题,因为jdk版本 jdk8 和jdk17 版本默认时区是不同的 trino官网明确说明了时区默认跟jdk走 解决方案 可以先行查看JDK本地时区库版本,执…...

xlua源码分析(二)lua Call C#的无wrap实现
xlua源码分析(二)lua Call C#的无wrap实现 上一节我们主要分析了xlua中C# Call lua的实现思路,本节我们将根据Examples 03_UIEvent,分析lua Call C#的底层实现。例子场景里有一个简单的UI面板,面板中包含一个input fie…...
MySql优化经验分享
一条sql的具体执行过程 连接 我们怎么查看MySQL当前有多少个连接? 可以用show status命令,模糊匹配Thread, Show global status like "Thread%" show global variables like wait timeout;—非交互式超时时间,如JDBC…...
【Linux】:使用git命令行 || 在github创建项目 || Linux第一个小程序——进度条(进阶版本)
在本章开始之前还是先给大家分享一张图片 这是C的笔试题 感兴趣的同学可以去试一试 有难度的哟 也可以直接在牛客网直接搜索这几道题目哈 好了今天我们正式进入我们的正题部分 🕖1.使用git命令行 安装git yum install git🕠2.在github创建项目 使用…...

Kotlin apply 交换两个数
代码: fun main() {var a 1var b 2a b.apply {b aprintln("$b")println("$this")}println("$a $b") }打印结果: 1 2 2 1原理分析: /*** Calls the specified function [block] with this value as its r…...

Android jetpack : Navigation 导航 路由 、 单个Activity嵌套多个Fragment的UI架构方式
Android Navigation 如何动态的更换StartDestination &&保存Fragment状态 Navigation(一)基础入门 google 官网 : Navigation 导航 路由 讨论了两年的 Navigation 保存 Fragment 状态问题居然被关闭了 Navigation是一种导航的概念,即把Activ…...

3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐
3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 还在使用功能单一的网易云音乐吗?想不想让你的播放器拥…...

ThinkPad开机嘀嘀响或报2100/2110错误?可能是硬盘松了!自己动手检测与修复指南
ThinkPad开机嘀嘀响或报2100/2110错误?三步排查硬盘接触不良问题ThinkPad用户对那个标志性的开机"嘀嘀"声再熟悉不过——正常情况下它意味着系统自检通过。但当这个声音变成急促的报警音,伴随屏幕上出现"2100 Detection error"或&qu…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...

BurpSuite 2025插件开发JDK版本兼容性实战指南
1. 为什么BurpSuite插件开发环境总在JDK版本上翻车?你是不是也经历过:下载好BurpSuite最新版2025.4,兴冲冲打开插件开发文档,照着官方示例写完第一个HelloWorld插件,一编译——java.lang.UnsupportedClassVersionError…...

如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南
如何快速掌握开源UE资产编辑器:UAssetGUI完整配置与实战指南 【免费下载链接】UAssetGUI A tool designed for low-level examination and modification of Unreal Engine game assets by hand. 项目地址: https://gitcode.com/gh_mirrors/ua/UAssetGUI UAss…...

第3篇:系统透视——信息部门如何构建“税务友好型”IT架构
本篇导读:如果你是信息总监或IT负责人,请通读全文,尤其是“系统合规设计的三必须”和“现场检查SOP”;如果你是财税人员,请重点阅读“研产供销全链条的系统对接要求”和“与IT部门的协作要点”;如果你是老板…...

开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南
开启Python GUI开发新纪元:Tkinter Designer可视化界面自动化生成终极指南 【免费下载链接】Tkinter-Designer An easy and fast way to create a Python GUI 🐍 项目地址: https://gitcode.com/gh_mirrors/tk/Tkinter-Designer 在Python GUI开发…...

终极指南:5步快速掌握免费的3D点云标注工具labelCloud
终极指南:5步快速掌握免费的3D点云标注工具labelCloud 【免费下载链接】labelCloud A lightweight tool for labeling 3D bounding boxes in point clouds. 项目地址: https://gitcode.com/gh_mirrors/la/labelCloud 想要为自动驾驶、机器人视觉或3D目标检测…...

收藏干货|2026 版企业 AI 落地实操指南,程序员小白入门避坑必备
如今人工智能早已脱离概念炒作阶段,全面扎根企业实际业务场景,成为技术从业者与企业管理者无法回避的发展课题。各行各业都加速布局AI赛道,行业心态也从初期观望试探,彻底转变为实打实的落地攻坚。 不少企业高层主动牵头统筹AI规划…...

CMSIS-DAP调试器原理与应用:以Elektor mbed interface为例
1. 项目概述:Elektor mbed interface [150554] 是什么?如果你玩过ARM Cortex-M系列的单片机,尤其是NXP LPC800系列,那你可能对“CMSIS-DAP”这个调试器标准不陌生。它是由ARM官方推出的一个开源调试接口标准,最大的好处…...