我在Vscode学OpenCV 图像运算(权重、逻辑运算、掩码、位分解、数字水印)
文章目录
- 权重 _ 要求两幅图像是相同大小的。
- [ 1 ] 以数据说话
- ( 1) 最终:
- ( 2 )gamma _输出图像的标量值
- [ 2 ] 图像的展现力
- gamma并不等同于增加曝光度
- ( 1 )gamma=100
- ( 2 )gamma = -100
- 逻辑运算
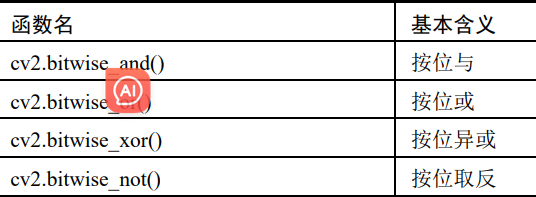
- 【1】用 cv2.bitwise_and()函数来实现按位与运算
- [ 1 ] 对比函数和逻辑运算符
- (1)速度
- (2)array展示
- [ 2 ] 创造一个掩码
- plt.subplot()是matplotlib库中的一个函数
- masked = cv.bitwise_and(imgx, imgx, mask=mask)
- 【2】用 cv2.bitwise_or()函数来实现按位或运算
- 【3】cv2.bitwise_not()来实现按位取反操作
- 【4】cv2.bitwise_xor()来实现按位异或运算
- 可以用其简单的加密
- 掩模(也被称作掩码)
- 位平面分解
- 【1】用途:
- 【2】拆解一张照片 和 分解出权重
- (1)可视化位平面的内容
- (2)保留位平面的原始权重。
- (3)区别点: plane = ((img >> i) & 1) * 【255或者(2**i)】它们的处理方式有所不同。
- 【3】数字水印
- (1)嵌入过程:将载体图像的第 0 个位平面替换为数字水印信息(一幅二值图像),将载体图像的最低有效位所构成的第 0 个位平面提取出来,得到数字水印信息
- (2)实现
- (3) 对比
权重 _ 要求两幅图像是相同大小的。
如果做的是普通的水印直接用水印就好了
再上一篇对于加法运算的了解,我们应该想想,在优先保留更多的图片有效信息的情况下,我们就应当对图像某一区域进行加法饱和或者模运算的限制,或者对某种类型和通道进行特殊限制。
要求
输入图像:需要两个输入图像,它们的大小和类型必须相同。
权重:每个输入图像都需要一个相应的权重。这些权重决定了每个像素从每个输入图像中获取的贡献。
gamma校正:这是一个可选参数,用于调整输出图像的亮度。
dst = cv2.addWeighted(src1, alpha, src2, beta, gamma)
- src1:第一个输入图像。
- alpha:第一个图像的权重。
- src2:第二个输入图像。
- beta:第二个图像的权重。
- gamma:一个添加到输出图像的标量值(必写项,不可省略,0也得在函数中标清)。
注意,alpha和beta的值通常在0到1之间,gamma通常设置为0或者。
[ 1 ] 以数据说话
用Jupyter notebook做
如果你在
cv.addweighted()函数中使用了浮点数权重,那么结果会被四舍五入到最接近的整数。
如果一个图像的权重大于另一个图像,那么在输出图像中,权重大的图像会更显眼。换句话说,权重大的图像对输出图像的影响更大。例如,如果你有两个图像 img1 和 img2,你可以使用 cv.addweighted(img1, 0.7,img2,0.3,0) 来创建一个新的图像,其中img1的内容会比img2的内容更显眼,因为 img1的权重(0.7)大于img2的权重(0.3) 。
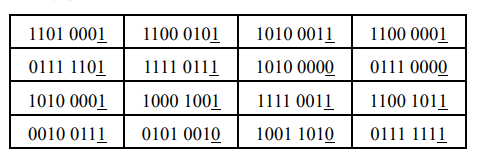
import numpy as np
import cv2 as cv
import matplotlib.pyplot as pltimg1 = np.random.randint(0,255,(3,3),dtype=np.uint8)
img1
img2 = np.random.randint(0,255,(3,3),dtype=np.uint8)
img2
imgx=cv.addWeighted(img1,0.3,img2,0.7,0)
imgx
( 1) 最终:
如果你在cv.addweighted()函数中使用了浮点数权重,那么结果会被四舍五入到最接近的整数。

( 2 )gamma _输出图像的标量值
在 cv.addweighted()函数中,gamma是一个标量值,它被添加到最终的加权和中。这个函数的完整公式是: dst = src1*alpha + src2*beta +gaa
在这个公式中,src1和src2是输入图像,α和β是它们的权重,γ是一个标量的值。
gamma 的主要作用是调整输出图像的亮度。
如果 gamma 的值大于0,输出图像会变亮;
如果 gamma 的值小于0,输出图像会变暗;
如果 gamma 的值等于0,输出图像的亮度不变。
所以,你可以通过调整 gamma 的值来调整输出图像的亮度。
[ 2 ] 图像的展现力
gamma并不等同于增加曝光度
虽然增加 gamma 值可以使图像看起来更亮,但这并不等同于增加曝光度。
在摄影中,曝光度是指相机传感器接收到的光的量。增加曝光度通常意味着更长的快门速度或更大的光圈,使更多的光进入相机。
gamma值的调整更像是在图像已经被拍摄和处理之后,对图像的亮度进行后期调整。
增加gamma值会使所有的像素值变得更亮,但并不会改变图像的对比度或颜色平衡,这与增加曝光度的效果是不同的。
所以,虽然增加 gamma 值可以使图像看起来更亮,但这并不等同于增加曝光度。
( 1 )gamma=100
( 2 )gamma = -100

逻辑运算
【1】用 cv2.bitwise_and()函数来实现按位与运算
dst = cv2.bitwise_and( src1, src2[, mask]]
dst 表示与输入值具有同样大小的 array 输出值。
src1 表示第一个 array 或 scalar 类型的输入值。
src2 表示第二个 array 或 scalar 类型的输入值。
mask 表示可选操作掩码,8 位单通道 array。
按位与操作有如下特点:
(1)将任何数值 N 与数值 0 进行按位与操作,都会得到数值 0。
(2) 将任何数值 N(这里仅考虑 8 位值)与数值 255(8 位二进制数是 1111 1111)进行按位与操作,都会得到数值 N 本身
[ 1 ] 对比函数和逻辑运算符
(1)速度
import cv2
import numpy as np
import timeita = np.random.randint(0,255,(1000,1000),dtype=np.uint8)
b = np.zeros((1000,1000),dtype=np.uint8)
b[0:500,0:500] = 255
b[999,999] = 255start = timeit.default_timer()
c = cv2.bitwise_and(a,b)
end = timeit.default_timer()
print("cv2.bitwise_and time: ", end - start)start = timeit.default_timer()
d = a & b
end = timeit.default_timer()
print("& operation time: ", end - start)

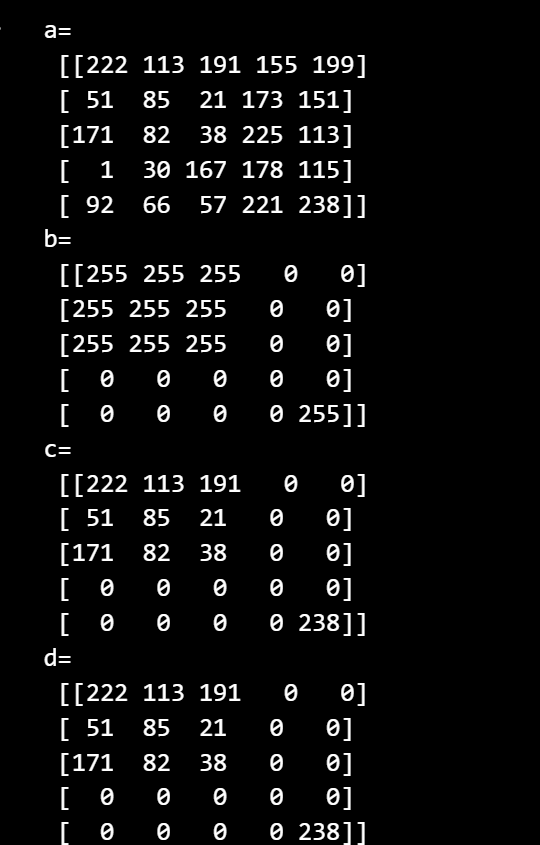
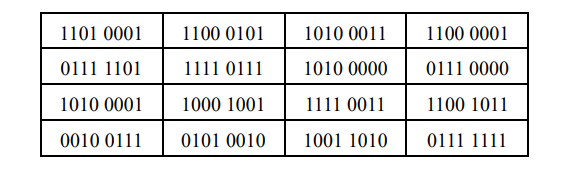
(2)array展示
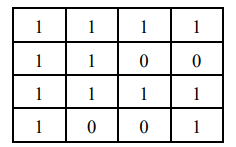
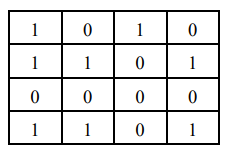
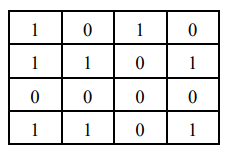
import cv2
import numpy as np
a=np.random.randint(0,255,(5,5),dtype=np.uint8)
b=np.zeros((5,5),dtype=np.uint8)
b[0:3,0:3]=255
b[4,4]=255
c=cv2.bitwise_and(a,b)
d=a&b
print("a=\n",a)
print("b=\n",b)
print("c=\n",c)
print("d=\n",d)
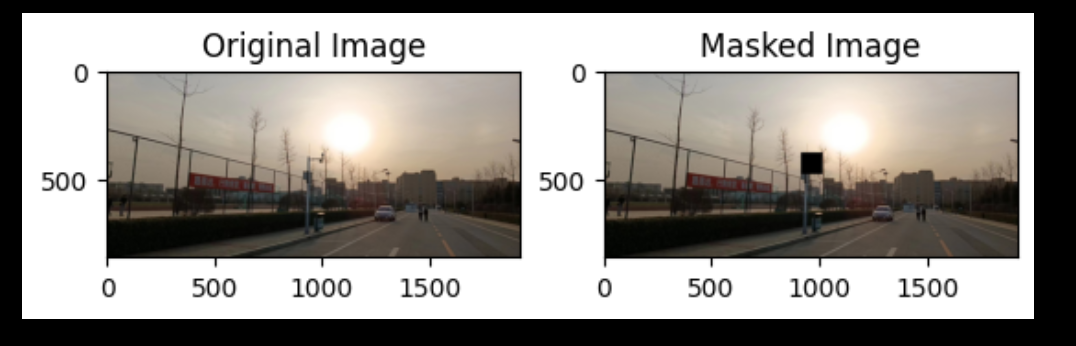
[ 2 ] 创造一个掩码
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt# 读取图像
imgx = cv.imread("Pic/test_img.jpg")# 创建一个掩码,大小和图像一样,类型为uint8,初始值全为255
mask = np.ones(imgx.shape[:2], dtype="uint8") * 255# 获取图像的中心坐标
h, w = imgx.shape[:2]
center_h, center_w = h // 2, w // 2# 将掩码的中心部分设置为0,创建一个小的黑色方块
size = 50 # 方块的大小
mask[center_h - size:center_h + size, center_w - size:center_w + size] = 0# 使用掩码
masked = cv.bitwise_and(imgx, imgx, mask=mask)# 显示原图和添加掩码后的图像
plt.subplot(1, 2, 1)
plt.imshow(cv.cvtColor(imgx, cv.COLOR_BGR2RGB))
plt.title('Original Image')plt.subplot(1, 2, 2)
plt.imshow(cv.cvtColor(masked, cv.COLOR_BGR2RGB))
plt.title('Masked Image')plt.show()
plt.subplot()是matplotlib库中的一个函数
函数的格式是plt.subplot(nrows, ncols, index)
-
nrows和ncols是子图的行数和列数。例如,nrows=1和ncols=2表示创建一个1行2列的子图网格。
-
index是子图的索引,用于指定当前活动的子图。索引从1开始,从左到右,从上到下。例如,index=1表示第一个子图,index=2表示第二个子图。
所以,plt.subplot(1, 2, 1)表示创建一个1行2列的子图网格,并选择第一个子图为当前活动的子图。你可以在这个子图上进行绘图操作,例如plt.plot()或plt.imshow()等。
masked = cv.bitwise_and(imgx, imgx, mask=mask)
bitwise_and函数对两个图像进行位运算的AND操作,mask参数指定了一个掩码,只有掩码为非零的部分才会被计算。
掩码(Mask)在图像处理中通常被用来指定对图像的某些部分进行操作,而忽略其他部分。
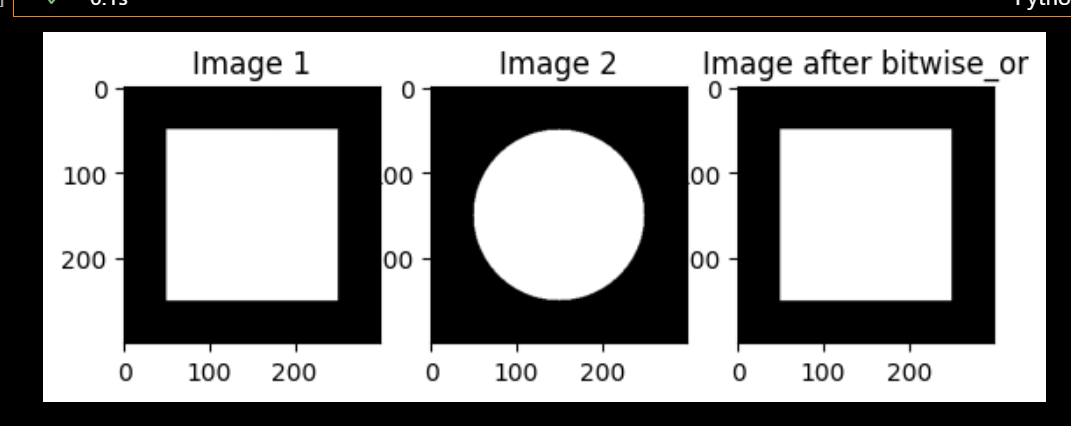
【2】用 cv2.bitwise_or()函数来实现按位或运算
dst = cv2.bitwise_or( src1, src2[, mask]] )
式中:
dst 表示与输入值具有同样大小的 array 输出值。
src1 表示第一个 array 或 scalar 类型的输入值。
src2 表示第二个 array 或 scalar 类型的输入值。
mask 表示可选操作掩码,8 位单通道 array 值
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt# 创建两个简单的图像
img1 = np.zeros((300, 300), dtype="uint8")
cv.rectangle(img1, (50, 50), (250, 250), 255, -1)
img2 = np.zeros((300, 300), dtype="uint8")
cv.circle(img2, (150, 150), 100, 255, -1)# 使用cv2.bitwise_or()函数将两个图像合并
bitwise_or = cv.bitwise_or(img1, img2)# 显示原图和合并后的图像
plt.subplot(1, 3, 1)
plt.imshow(img1, cmap='gray')
plt.title('Image 1')plt.subplot(1, 3, 2)
plt.imshow(img2, cmap='gray')
plt.title('Image 2')plt.subplot(1, 3, 3)
plt.imshow(bitwise_or, cmap='gray')
plt.title('Image after bitwise_or')plt.show()
【3】cv2.bitwise_not()来实现按位取反操作
dst = cv2.bitwise_not( src[, mask]] )
dst 表示与输入值具有同样大小的 array 输出值。
src 表示 array 类型的输入值。
mask 表示可选操作掩码,8 位单通道 array 值
如果你有一个二进制数1101,按位取反后,它会变成0010。
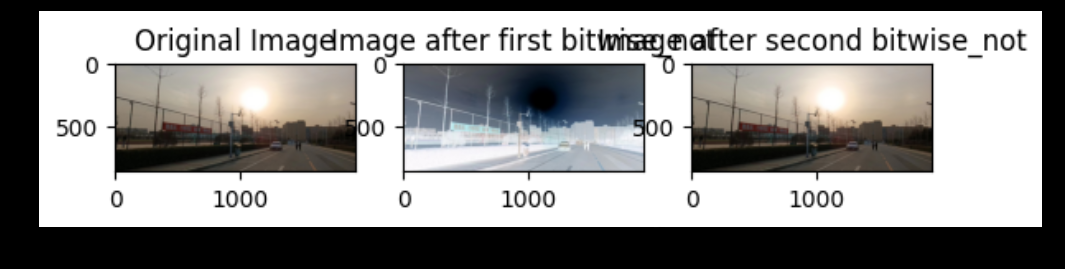
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt# 读取图像
imgx = cv.imread("Pic/test_img.jpg")# 对图像进行按位取反操作
imgx_not = cv.bitwise_not(imgx)# 再次对图像进行按位取反操作
imgx_not_not = cv.bitwise_not(imgx_not)# 显示原图、第一次取反后的图像和第二次取反后的图像
plt.subplot(1, 3, 1)
plt.imshow(cv.cvtColor(imgx, cv.COLOR_BGR2RGB))
plt.title('Original Image')plt.subplot(1, 3, 2)
plt.imshow(cv.cvtColor(imgx_not, cv.COLOR_BGR2RGB))
plt.title('Image after first bitwise_not')plt.subplot(1, 3, 3)
plt.imshow(cv.cvtColor(imgx_not_not, cv.COLOR_BGR2RGB))
plt.title('Image after second bitwise_not')plt.show()
【4】cv2.bitwise_xor()来实现按位异或运算
dst = cv2.bitwise_xor( src1, src2[, mask]] )
式中:
dst 表示与输入值具有同样大小的 array 输出值。
src1 表示第一个 array 或 scalar 类型的输入值。
src2 表示第二个 array 或 scalar 类型的输入值。
mask 表示可选操作掩码,8 位单通道 array 值
import cv2
import numpy as np
a=np.random.randint(0,255,(5,5),dtype=np.uint8)
b=np.random.randint(0,255,(5,5),dtype=np.uint8)
b[0:3,0:3]=255
b[4,4]=255
c=cv2.bitwise_xor(a,b)
d=a^bprint("a=\n",a)
print("b=\n",b)
print("c=\n",c)
print("d=\n",d)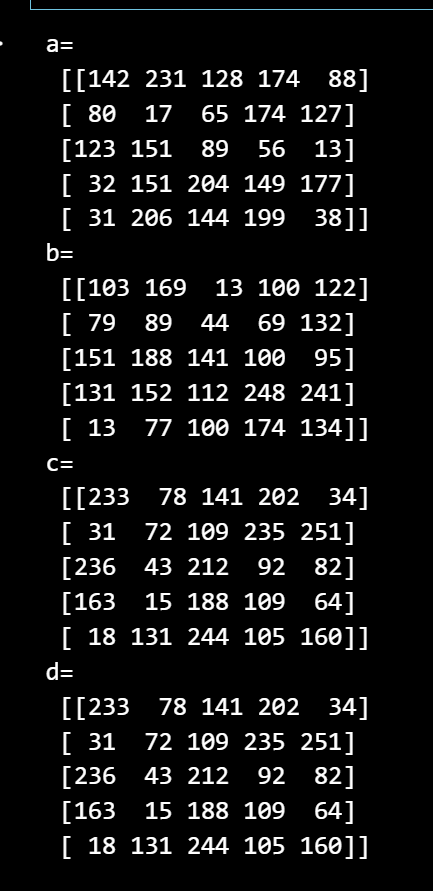
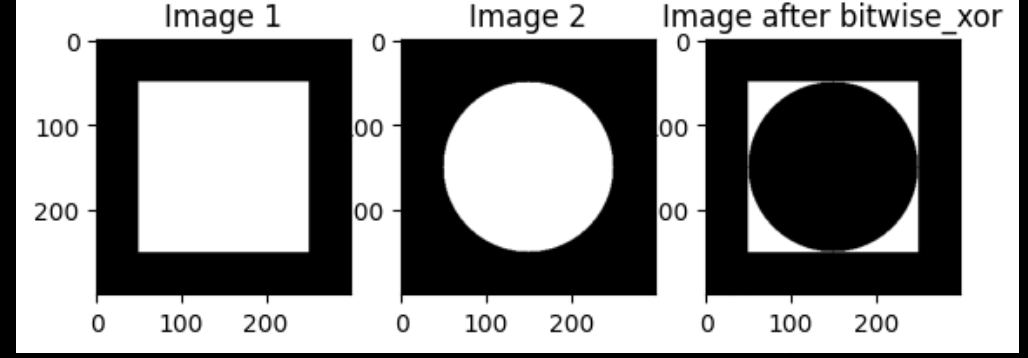
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt# 创建两个简单的图像
img1 = np.zeros((300, 300), dtype="uint8")
cv.rectangle(img1, (50, 50), (250, 250), 255, -1)
img2 = np.zeros((300, 300), dtype="uint8")
cv.circle(img2, (150, 150), 100, 255, -1)# 使用cv2.bitwise_xor()函数将两个图像合并
bitwise_xor = cv.bitwise_xor(img1, img2)# 显示原图和合并后的图像
plt.subplot(1, 3, 1)
plt.imshow(img1, cmap='gray')
plt.title('Image 1')plt.subplot(1, 3, 2)
plt.imshow(img2, cmap='gray')
plt.title('Image 2')plt.subplot(1, 3, 3)
plt.imshow(bitwise_xor, cmap='gray')
plt.title('Image after bitwise_xor')plt.show()
可以用其简单的加密
找到合适的“密码”
一次异或操作为加密兔
二次拿着加密密码解码
掩模(也被称作掩码)
用于屏蔽模板的灰度图像
# ,操作只会在掩模值为非空的像素点上执行,并将其他像素点的值置为0。
计算结果=cv2.add(参数 1 , 参数 2 , 掩模)
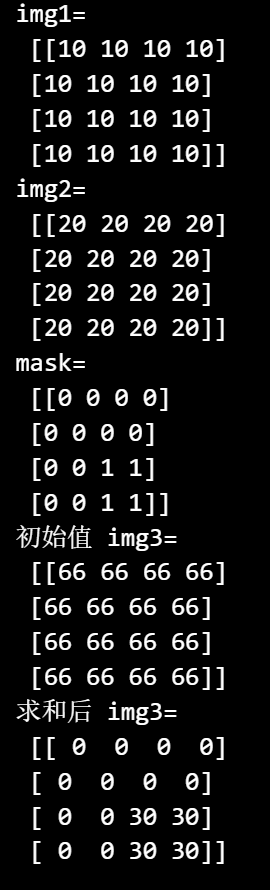
cv2.add(img1, img2, mask=mask)函数将img1和img2中对应的像素值相加,结果存储在img3中。但是,只有mask中值为1的位置才会被计算,mask中值为0的位置将被忽略
import cv2
import numpy as np# 创建两个图像和一个掩码
img1 = np.ones((4,4), dtype=np.uint8) * 10
img2 = np.ones((4,4), dtype=np.uint8) * 20
mask = np.zeros((4,4), dtype=np.uint8)
mask[2:4, 2:4] = 1# 创建一个初始值全为66的图像
img3 = np.ones((4,4), dtype=np.uint8) * 66print("img1=\n", img1)
print("img2=\n", img2)
print("mask=\n", mask)
print("初始值 img3=\n", img3)# 使用掩码将img1和img2中对应的像素值相加,结果存储在img3中
img3 = cv2.add(img1, img2, mask=mask)print("求和后 img3=\n", img3)
位平面分解
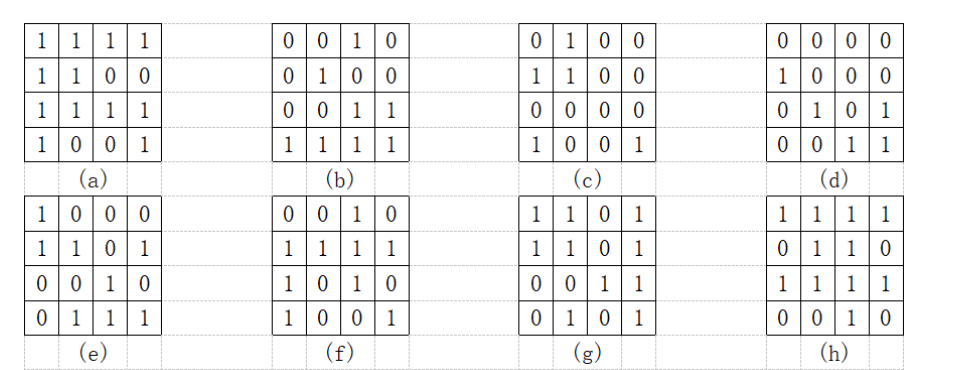
位平面分解是一种将数字图像分解成多个二进制位平面的方法。在数字图像中,每个像素通常用几个字节表示,每个字节由8个二进制位组成。位平面分解通过将每个像素的二进制表示拆分成各个位(或者称为二进制平面),从而提取出图像中每个像素的不同位信息。

对于灰度图像,位平面分解通常用于灰度图像。每个像素只有一个8位的强度值,值是一个介于0和255之间的整数,位平面分解就是将这8位二进制数分解为8个单独的位,每个位平面都是一个二值图像,表示原图像中对应位的值。
对于彩色图像,每个像素有三个8位的强度值(通常是红色、绿色和蓝色通道)。值是一个包含三个介于0和255之间的整数的向量,你可以分别对这三个通道进行位平面分解,得到三组位平面。每组位平面都是一个二值图像,表示原图像中对应通道和对应位的值【你可以对每个通道分别进行位平面分解,但这会得到24个位平面,而不是8个。】
【1】用途:
【2】拆解一张照片 和 分解出权重
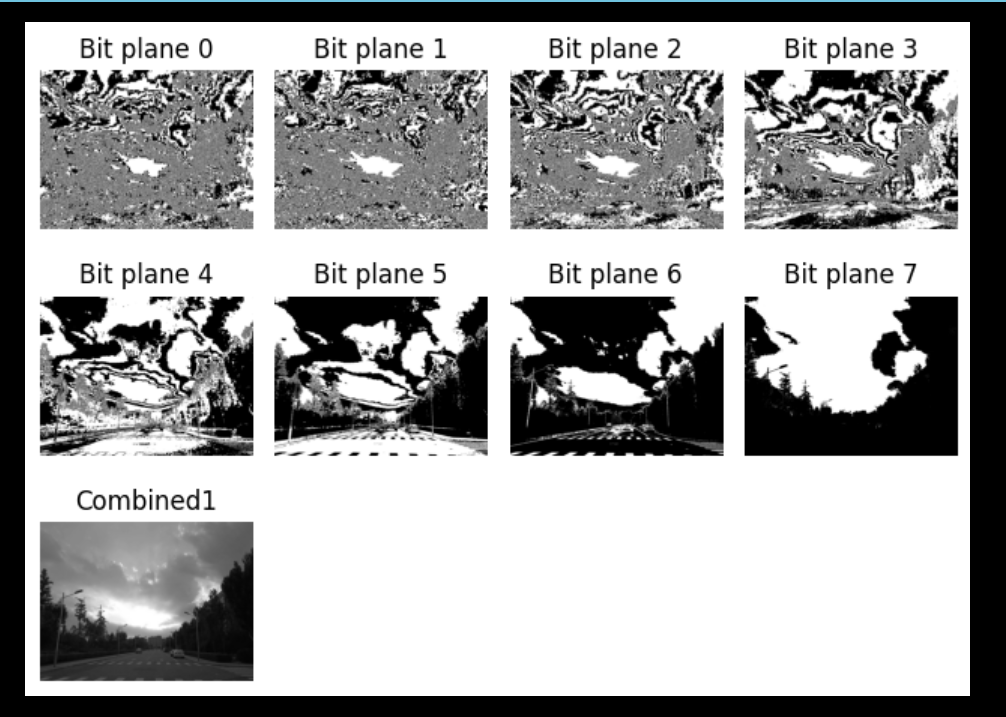
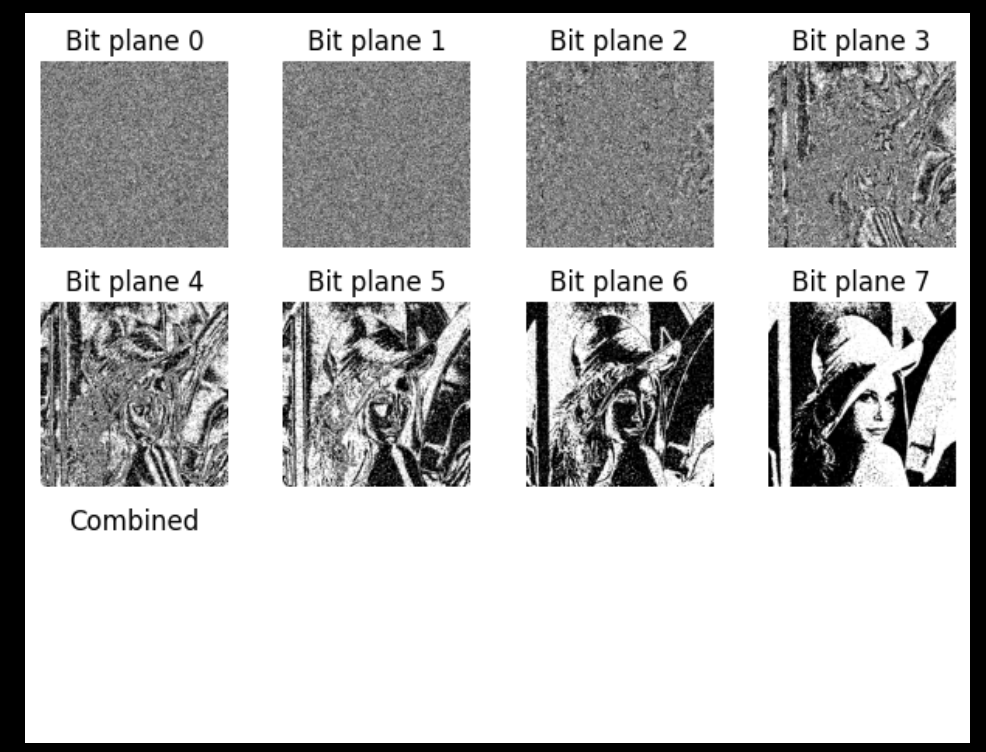
(1)可视化位平面的内容
import cv2
import numpy as np
import matplotlib.pyplot as plt# 读取图像
img = cv2.imread('./img/c1c.jpg', 1)
if img is None:print('Failed to load image.')
else:# 进行位平面分解bit_planes = []for i in range(8):plane = ((img >> i) & 1) * 255bit_planes.append(plane)# 显示各个位平面的图像for i, plane in enumerate(bit_planes):plt.subplot(3, 4, i + 1)plt.imshow(plane[:,:,::-1], cmap='gray')plt.title(f'Bit plane {i}')plt.axis('off')# 显示所有位平面的和plt.subplot(3, 4, 9)plt.axis('off')plt.imshow(img[:,:,::-1])plt.title('Combined1')
plt.tight_layout()
plt.show()
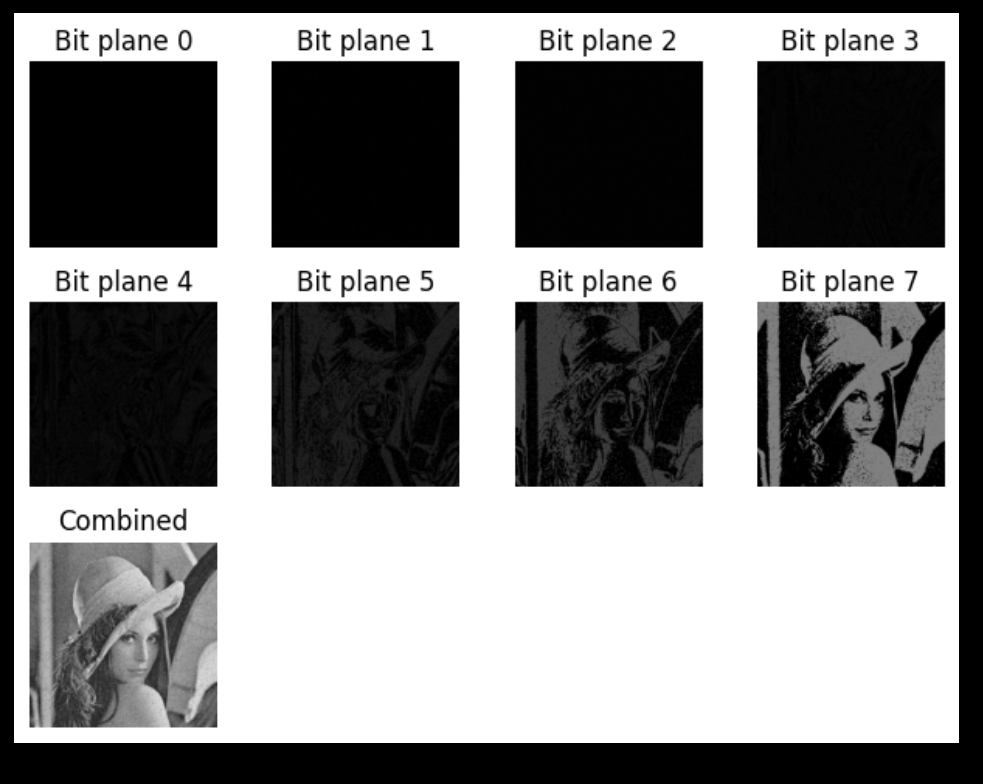
(2)保留位平面的原始权重。
import cv2
import numpy as np
import matplotlib.pyplot as plt# 读取图像
img = cv2.imread('./img/cc.jpg', 1)
if img is None:print('Failed to load image.')
else:# 进行位平面分解bit_planes = []for i in range(8):plane = ((img >> i) & 1) * (2**i)bit_planes.append(plane)# 复原位平面reconstructed = np.sum(bit_planes, axis=0).astype(np.uint8)# 显示各个位平面的图像for i, plane in enumerate(bit_planes):plt.subplot(3, 4, i + 1)plt.imshow(plane[:,:,::-1], cmap='gray')plt.title(f'Bit plane {i}')plt.axis('off')# 显示复原的图像plt.subplot(3, 4, 9)plt.axis('off')plt.imshow(reconstructed[:,:,::-1])plt.title('Reconstructed')plt.tight_layout()
plt.show()
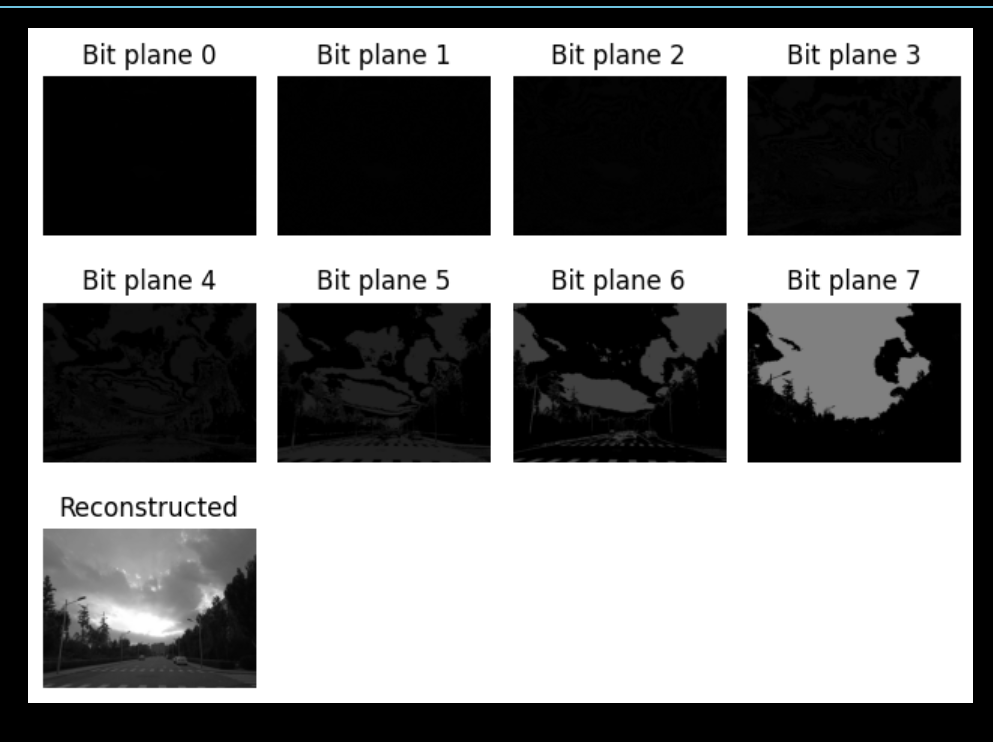
(3)区别点: plane = ((img >> i) & 1) * 【255或者(2**i)】它们的处理方式有所不同。
plane = ((img >> i) & 1) * 255这行代码将图像的每个像素值右移i位,然后与1进行位与运算。这样可以得到每个像素值的第i位。然后,这个位值被乘以255,所以结果图像的每个像素值要么是0(如果原像素值的第i位是0),要么是255(如果原像素值的第i位是1)。这样可以清晰地看到每个位平面的内容。
plane = ((img >> i) & 1) * (2**i)这行代码的处理方式类似,但是它将位值乘以2**i而不是255。这意味着结果图像的每个像素值要么是0,要么是2**i。这样可以保留每个位平面的原始权重,但是可能会使得低位平面的内容难以看清,因为低位平面的像素值要么是0,要么是1、2、4等较小的数。
总的来说,plane = ((img >> i) & 1) * 255更适合于可视化位平面的内容,不适用于重新复原图片;而plane = ((img >> i) & 1) * (2**i)更适合于保留位平面的原始权重。
【3】数字水印
如果做的是普通的水印直接用前面提到的水印就好了
最低有效位(LSB)是二进制数的最低位,也就是第0位,用于表示二进制数的最小值。在图像处理中,最低有效位信息隐藏是一种技术,它将一个二值图像嵌入到载体图像的最低有效位中。
这种方法充分利用了最低有效位的特性。当我们将二值图像嵌入到最低有效位层时,对于载体图像来说,这些位的变化微弱到几乎无法被肉眼察觉。由于隐藏的二值图像位于最低有效位上,对载体图像的影响非常不明显,从而实现了较高程度的隐蔽性。
最低有效位信息隐藏技术在图像隐写领域得到广泛应用,可用于保护敏感信息的安全传输。然而需要注意的是,最低有效位信息隐藏是一种相对简单的隐藏方法,容易被一些隐写分析算法检测出来。因此,在实际应用中,可能需要采用更复杂的隐写技术来提高隐蔽性和安全性。
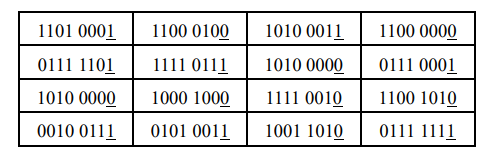
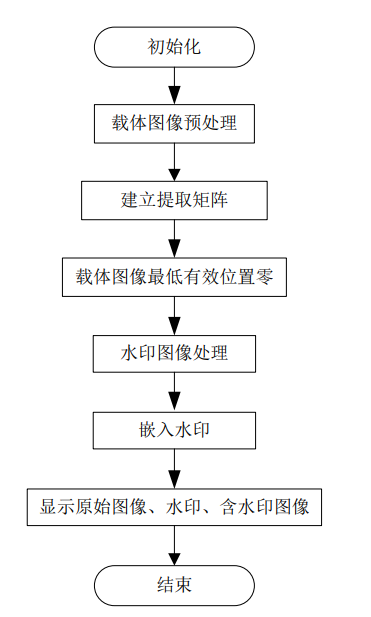
(1)嵌入过程:将载体图像的第 0 个位平面替换为数字水印信息(一幅二值图像),将载体图像的最低有效位所构成的第 0 个位平面提取出来,得到数字水印信息
(1)图像
“最低有效位”位平面
(2)水印处理
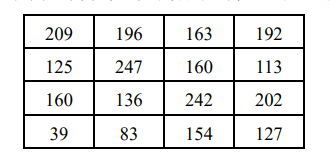
在灰度二值图像中,像素值只有 0 和 255 两种类型值,分别用来表示黑色和白色。可以将其中的 255 转换为 1,这样就得到了一幅二进制二值图像。。在二进制二值图像中,仅仅用一个比特位表示一个像素值,像素值只有 0 和 1 两种可能值。
(3)嵌入
由于信息的最低有效位对值的大小影响有限,因此,将载体图像最低有效位的值用水印信息替换后,载体图像像素的值并没有发生太大变化,人眼不足以看出区别,水印具有较高的隐
蔽性
(2)实现
将像素值对 2 取模(或者&1也可以判断),可以获取像素值的最低有效位。因此,可以通过让含水印载体图像对 2 取模的方式,获取图像的“最低有效位”位平面,提取到的位平面即为水印信息
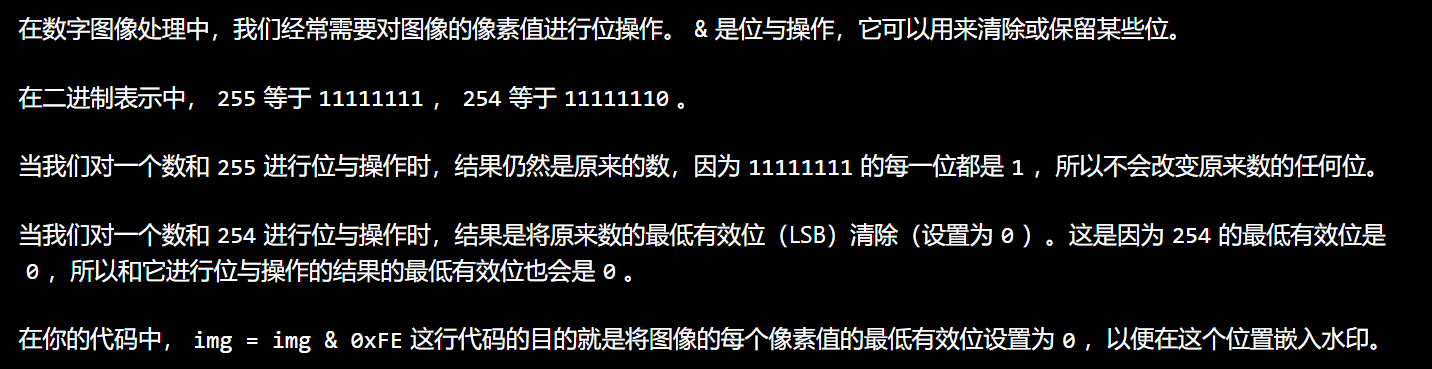
在数字图像处理中,一个像素的值通常是一个范围在0到255之间的整数,这个整数被表示为8位二进制数。在这个二进制数中,最高位(最左边的位)是最重要的,它包含了大部分的像素信息。相反,最低位(最右边的位)是最不重要的,它只包含了一小部分的像素信息。
当我们需要在图像中隐藏某些信息(例如数字水印)时,通常会选择在最低有效位(LSB)中进行隐藏,因为这对原始图像的影响很小,几乎不可见。
我们会使用数字254(二进制表示为11111110)作为一个掩码,将像素值的最低位设置为0。这可以通过按位与运算来实现。按位与运算的规则是,如果两个位都是1,则结果为1,否则为0。因此,当一个像素值(范围在0到255之间的整数)与254进行按位与运算时,结果的最低位总是0,而其他位保持不变。这样就实现了将像素值的最低位设置为0的目的。
您可以将要隐藏的信息(如数字水印)嵌入到这个最低位中。这可以通过按位或运算来实现。按位或运算的规则是,如果两个位中至少有一个是1,则结果为1,否则为0。因此,将您的水印值(0或1)与已经被设置为0的像素值进行按位或运算,如果水印值为1,则结果的最低位为1,否则结果的最低位仍为0。这样就实现了将水印嵌入到像素值的最低位的目的。
数字254在这里的作用是作为一个掩码,用来清除像素值的最低位,以便在该位置上嵌入水印。
(3) 对比
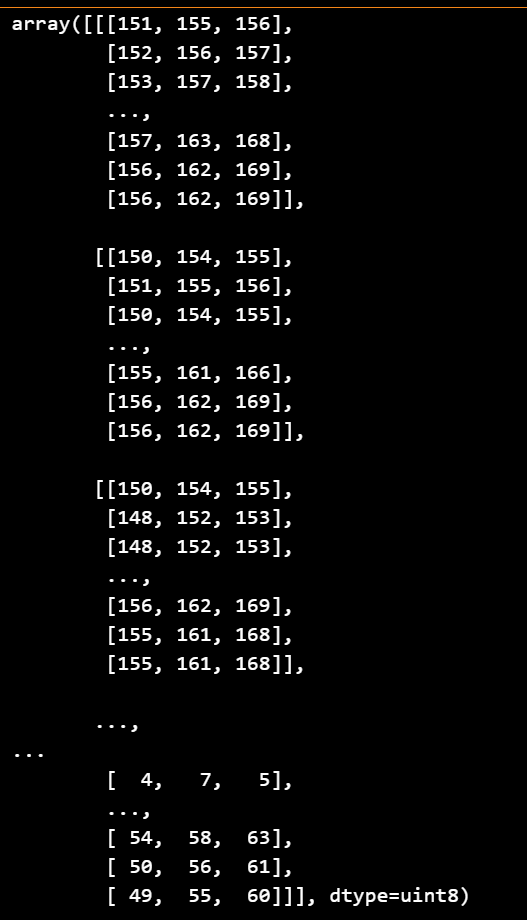
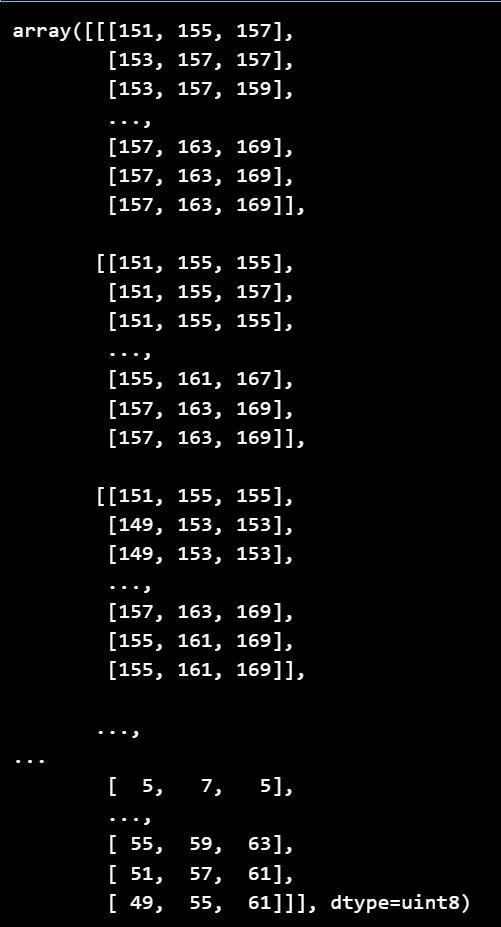
(1)原图:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像
img = cv2.imread('./Pic/test_img.jpg', 1)
img
(2)数字水印后
import cv2
import numpy as np# 读取图像
img = cv2.imread('./Pic/test_img.jpg', 1)
if img is None:print('Failed to load image.')
else:# 创建一个简单的水印watermark = np.zeros_like(img)watermark[:50, :50] = 255 # 前50行和前50列的像素设置为255# 将原图像的最低有效位设置为0img = img & 0xFE # 0xFE = 11111110# 将水印的最高有效位嵌入到原图像的最低有效位img = img | (watermark >> 7)# 显示带有水印的图像cv2.imshow('Watermarked Image', img)cv2.waitKey(0)cv2.destroyAllWindows()
(3)生成元素值都是 254 的数组
相关文章:
我在Vscode学OpenCV 图像运算(权重、逻辑运算、掩码、位分解、数字水印)
文章目录 权重 _ 要求两幅图像是相同大小的。[ 1 ] 以数据说话( 1) 最终:( 2 )gamma _输出图像的标量值 [ 2 ] 图像的展现力gamma并不等同于增加曝光度( 1 )gamma100( 2 )…...

【 Docker: 数据卷挂载】
背景 Docker只提供了容器运行的必备依赖,但是一些编辑等操作的依赖是不支持的,如vi操作容器内部文件、将静态资源拷贝到容器内来等。 docker pull nginx docker run -d -p 81:80 --namemynginx -v D:/docker/nginx/www:/usr/share/nginx/www -v D:/dock…...
)
windows上的静态链接和动态链接的区别与作用(笔记)
C源代码文件经过预编译、编译和汇编后输出的目标文件的后缀和操作系统是有关系的。不同的操作系统使用不同的命名约定和文件格式来表示目标文件。常见的目标文件后缀包括: - Windows系统:.obj、.lib、.dll - Linux系统:.o、.a、.so - macOS系…...

MySQL和Postgresql数据库备份和恢复
MySQL和Postgresql数据库备份和恢复 一、MySQL数据库备份 备份单个数据库 $ mysqldump -uroot -p bdname > dbname.sql备份多个数据库 $ mysqldump -uroot -p --databases dbname1 dbname2 ... > dbname.sql # 备份所有数据库 $ mysqldump -uroot -p --all-databases…...

使用MCU上的I2C总线进行传感器应用
使用MCU上的I2C总线进行传感器应用是嵌入式系统开发中常见的任务,本文将介绍在MCU上实现I2C总线传感器应用的相关技术和流程。 首先,I2C(Inter-Integrated Circuit)总线是一种常用的串行通信协议,用于连接多个设备&am…...
汽车标定技术(七)--基于模型开发如何生成完整的A2L文件(2)
目录 1. 自定义ASAP2文件 2. asap2userlib.tlc需要修改的部分 3. 标定量观测量地址替换 3.1 由elf文件替换 3.2 由map文件替换 3.3 正则表达式(含asap2post.m修改方法) 4.小结 书接上文汽车标定技术(五)--基于模型开发如何生成完整的A2L文件(1)-C…...
ZZ308 物联网应用与服务赛题第E套
2023年全国职业院校技能大赛 中职组 物联网应用与服务 任 务 书 (E卷) 赛位号:______________ 竞赛须知 一、注意事项 1.检查硬件设备、电脑设备是否正常。检查竞赛所需的各项设备、软件和竞赛材料等; 2.竞赛任务中所使用的…...

web相关框架
web相关框架 web 后端开发框架 expressKoaHapiNest web 前端UI库(组件库) Naive-UiAnt Design VueElement plus 后端页面,前端框架(一个开箱即用前端框架) naive-ui-admingin-vue-adminvue-vben-adminvue-pure-adminvue3-antd-admin 无…...
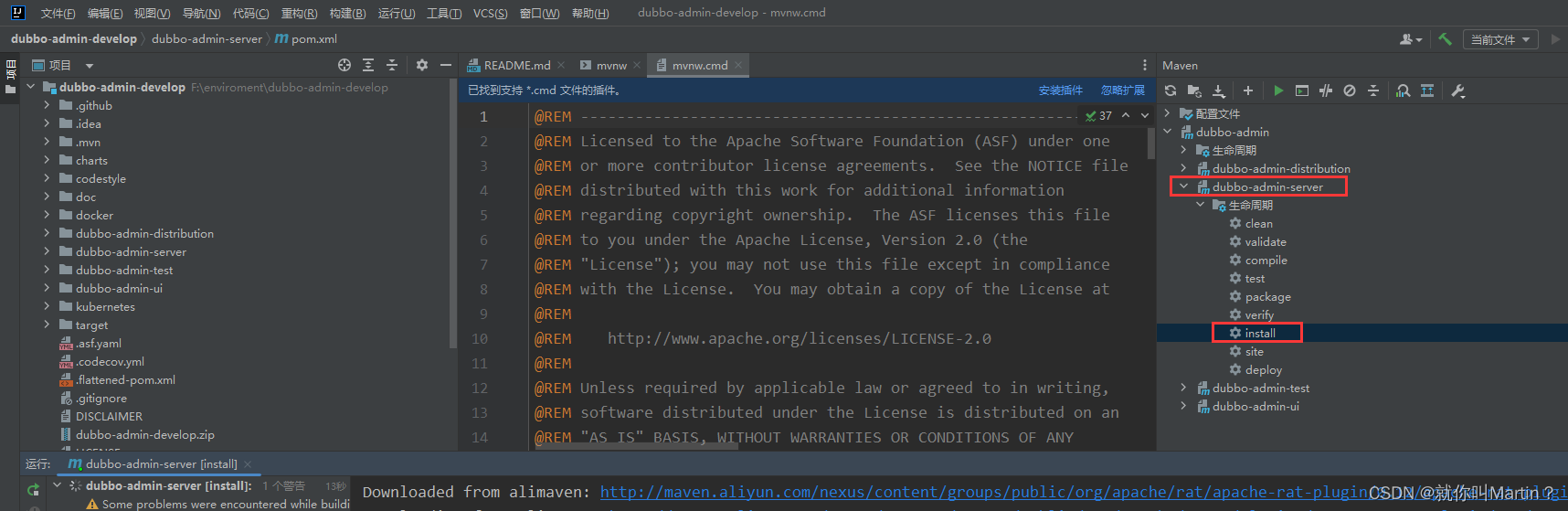
安装dubbo-admin报错node版本和test错误
✅作者简介:CSDN内容合伙人、信息安全专业在校大学生🏆 🔥系列专栏 :dubbo-admin安装 📃新人博主 :欢迎点赞收藏关注,会回访! 💬舞台再大,你不上台࿰…...
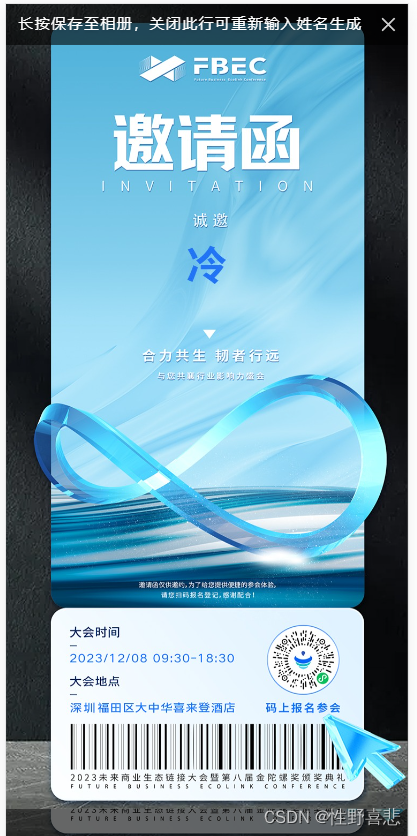
HTML使用canvas绘制海报(网络图片)
生成前: 生成后: <!DOCTYPE html> <html><head><meta charset"utf-8"><title>媒体参会嘉宾邀请函生成链接</title><link rel"stylesheet" href"https://cdn.jsdelivr.net/npm/vant2.10…...
20道高频JavaScript面试题快问快答
※其他的快问快答,看这里! 10道高频Qiankun微前端面试题快问快答 10道高频webpack面试题快问快答 20道高频CSS面试题快问快答 20道高频JavaScript面试题快问快答 30道高频Vue面试题快问快答 面试中的快问快答 快问快答的情景在面试中非常常见。 在面试过…...
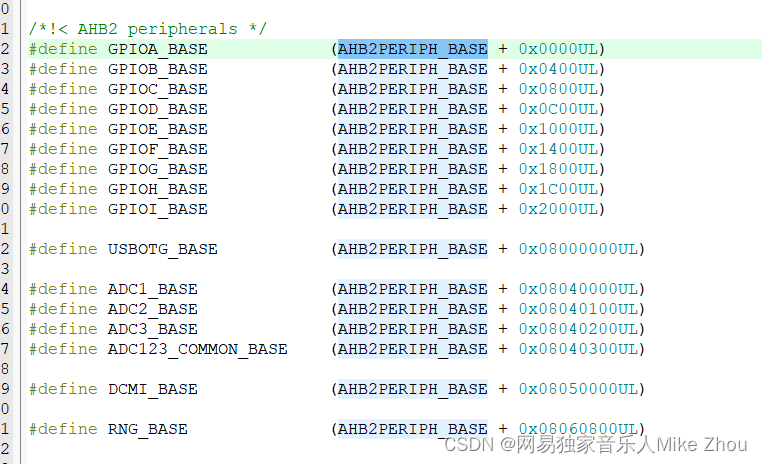
【STM32】HAL库UART含校验位的串口通信配置BUG避坑
【STM32】HAL库UART含校验位的串口通信配置BUG避坑 文章目录 UART协议校验位HAL库配置含校验位的串口配置BUG避坑附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作SysTick系统定时器精准延时延时函数阻塞延时非阻塞延时 位带操作位带代码位带宏定义总线函…...

Python实用技巧:将 Excel转为PDF
将Excel文件转换为PDF可以方便储存表格数据,此外在打印或共享文档时也能确保表格样式布局等在不同设备和操作系统上保持一致。今天给大家分享一个使用第三方Python库Spire.XLS for Python 实现Excel转PDF的简单方法。 实现步骤 首先,通过pip命令来安装依…...

【面经】讲一下你对jvm和jmm的了解
JVM JVM是Java虚拟机,是Java程序的执行环境。它是一种虚拟的计算机,通过在实际的计算机上仿真模拟各种计算机功能来实现. JVM是Java程序运行的核心,可以将Java字节码转换为可执行的机器码,提供了跨平台性、优秀的垃圾回收器&…...
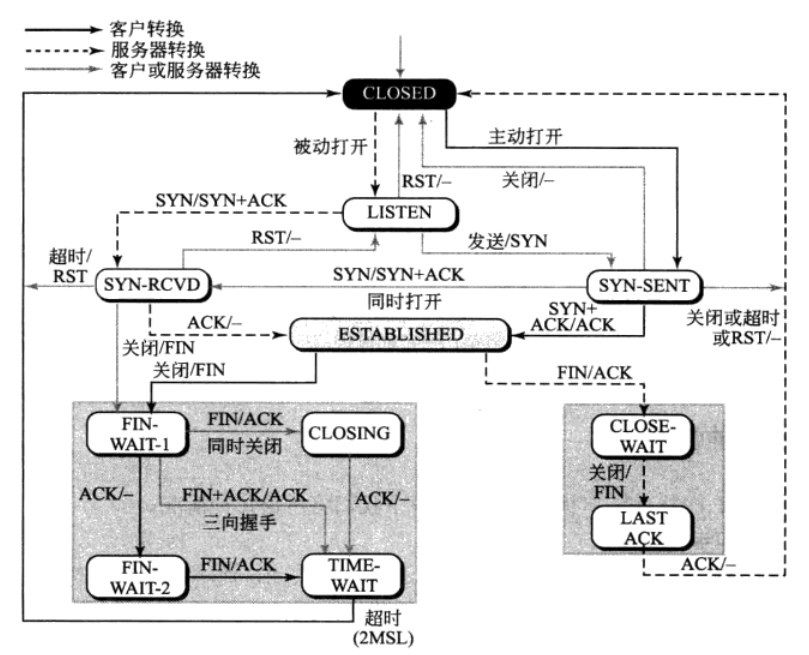
《网络协议》03. 传输层(TCP UDP)
title: 《网络协议》03. 传输层(TCP & UDP) date: 2022-09-04 22:37:11 updated: 2023-11-08 15:58:52 categories: 学习记录:网络协议 excerpt: 传输层、UDP、TCP(可靠传输,流量控制,拥塞控制…...

ZooKeeper调优
服务器硬件配置 建议 Zookeeper 的服务器最好专属(或是资源隔离的)。磁盘由于 Zookeeper 的数据写入磁盘,强烈建议要使用 SSD。 Linux操作系统优化 Zookeeper 的性能会很明显受到交换分区的影响。建议部署 Zookeeper 的服务器关闭交换分区功能或是通过内核参数调整,减少…...
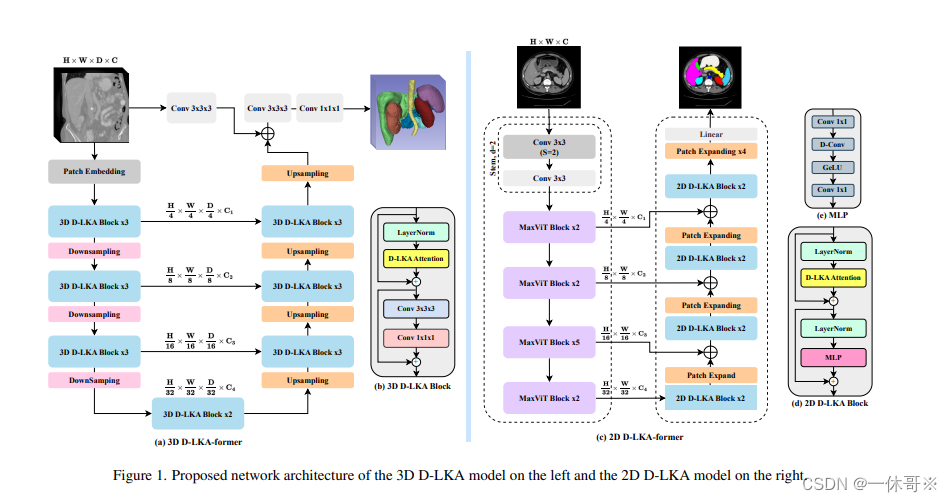
改进YOLOv5:结合ICCV2023|动态蛇形卷积,构建不规则目标识别网络
🔥🔥🔥 提升多尺度、不规则目标检测,创新提升 🔥🔥🔥 🔥🔥🔥 捕捉图像特征和处理复杂图像特征 🔥🔥🔥 👉👉👉: 本专栏包含大量的新设计的创新想法,包含详细的代码和说明,具备有效的创新组合,可以有效应用到改进创新当中 👉👉👉: �…...
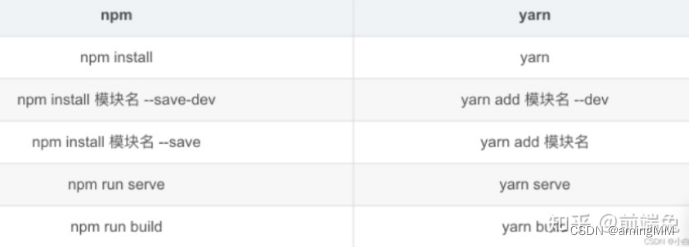
开发知识点-NodeJs-npm/Pnpm/Vite/Yarn包管理器
包管理器 vue-cli-service 不是内部或外部命令,也不是可运行的程序npm 全局变量pnpmPnpm介绍ViteYarn ‘vue-cli-service’ 不是内部或外部命令,也不是可运行的程序 yarn yarn add vue-amap yarn add vue-amap ant-design-vue npm 全局变量 换主机 新…...
Mac上好用的翻译软件推荐 兼容m
Mac翻译软件可以用在学习,工作,生活当中,一款好用的翻译软件,具有翻译准确,翻译快速等基本特点,能够帮您提高工作效率。Mac上有什么好用的翻译软件呢?今天小编为大家整理了6款好用的Mac翻译软件…...

软件下载网站
1.qt 下载官网 Index of /new_archive/qt 2.qt-vs 插件下载 Index of /official_releases/vsaddin...

如何在macOS上使用Whisky轻松运行Windows应用:Apple Silicon用户的终极指南
如何在macOS上使用Whisky轻松运行Windows应用:Apple Silicon用户的终极指南 【免费下载链接】Whisky A modern Wine wrapper for macOS built with SwiftUI 项目地址: https://gitcode.com/gh_mirrors/wh/Whisky 还在为Mac上无法运行Windows专属软件而烦恼吗…...

IBM Plex 企业级开源字体:技术决策者的零成本部署与全场景应用指南
IBM Plex 企业级开源字体:技术决策者的零成本部署与全场景应用指南 【免费下载链接】plex The package of IBM’s typeface, IBM Plex. 项目地址: https://gitcode.com/gh_mirrors/pl/plex IBM Plex 字体家族作为 IBM 推出的企业级开源字体解决方案ÿ…...

摄影作品批量水印完整指南:3分钟学会自动添加专业相机参数和品牌标识
摄影作品批量水印完整指南:3分钟学会自动添加专业相机参数和品牌标识 【免费下载链接】semi-utils 一个批量添加相机机型和拍摄参数的工具,后续「可能」添加其他功能。 项目地址: https://gitcode.com/gh_mirrors/se/semi-utils 你是否厌倦了为每…...

生产排期与MES/ERP系统打通,实操方法详解 —— 2026企业级智能体自动化选型与实战指南
在2026年的工业4.0深化阶段,制造企业已从单纯的数字化转型迈向“全面智能化”时代。生产排程作为工厂的“大脑”,其与MES(制造执行系统)及ERP(企业资源计划)系统的深度打通,不再是可选的优化项&…...
Qwen-Image-2512-Pixel-Art-LoRA 结合YOLOv8:智能游戏素材分类与像素化流水线
Qwen-Image-2512-Pixel-Art-LoRA 结合YOLOv8:智能游戏素材分类与像素化流水线 1. 引言 做独立游戏或者像素风项目,美术素材的处理常常是个让人头疼的活儿。你可能遇到过这种情况:手头有一堆现成的美术资源,角色、武器、场景图什…...

YASKAWA JANCD-PC51控制板
YASKAWA JANCD-PC51控制板是安川电机专为工业自动化设计的高性能核心控制单元,适用于机器人、数控机床、包装机械等精密运动控制领域。32位工业处理器,指令速度1μs/步,实时响应快。32位数据总线,传输速率100MB/s,DMA技…...

Windows安装Redis和Fastapi联合使用
方法一:.msi 安装包(推荐新手) 这种方式最省心,有图形化安装向导,能帮你自动配置好系统环境。 下载安装包:访问 tporadowski/redis 在 GitHub 上的发布页面,最新稳定版本是 5.0.14.1。下载名为…...

Cache映射计算
在刷题时经常会遇到 Cache 与主存相关的计算题,很长一段时间没看教材,具体概念记得不那么清楚了,算起来总是概念一大堆,分不清谁是谁。网上有很多优秀的文章,讲清楚了 Cache 是怎么工作的,也通俗解释了三种…...

别再傻傻分不清了!一文搞懂服务器里的‘隐形管家’BMC和带外管理OOB
服务器里的“隐形管家”:BMC与带外管理OOB深度解析 想象一下,当你管理的服务器突然宕机,操作系统完全无响应,传统远程连接方式全部失效时,还有最后一道防线能让你不必亲自跑到机房——这就是BMC和OOB技术构成的“隐形管…...

EAIA生产环境部署:如何设置定时任务和监控系统运行
EAIA生产环境部署:如何设置定时任务和监控系统运行 【免费下载链接】executive-ai-assistant 项目地址: https://gitcode.com/gh_mirrors/ex/executive-ai-assistant EAIA(executive-ai-assistant)是一款强大的AI助手工具,…...