【STM32】HAL库UART含校验位的串口通信配置BUG避坑
【STM32】HAL库UART含校验位的串口通信配置BUG避坑
文章目录
- UART协议
- 校验位
- HAL库配置
- 含校验位的串口配置BUG避坑
- 附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
- SysTick系统定时器精准延时
- 延时函数
- 阻塞延时
- 非阻塞延时
- 位带操作
- 位带代码
- 位带宏定义
- 总线函数
- 一、位带操作理论及实践
- 二、如何判断MCU的外设是否支持位带
UART协议
UART通过一条线就能完成数据的发送
另外一条线则完成数据的接收
所以一共是两条线 TX RX
UART在空闲时为低电平
时钟周期由波特率确定 通常是115200bit/s
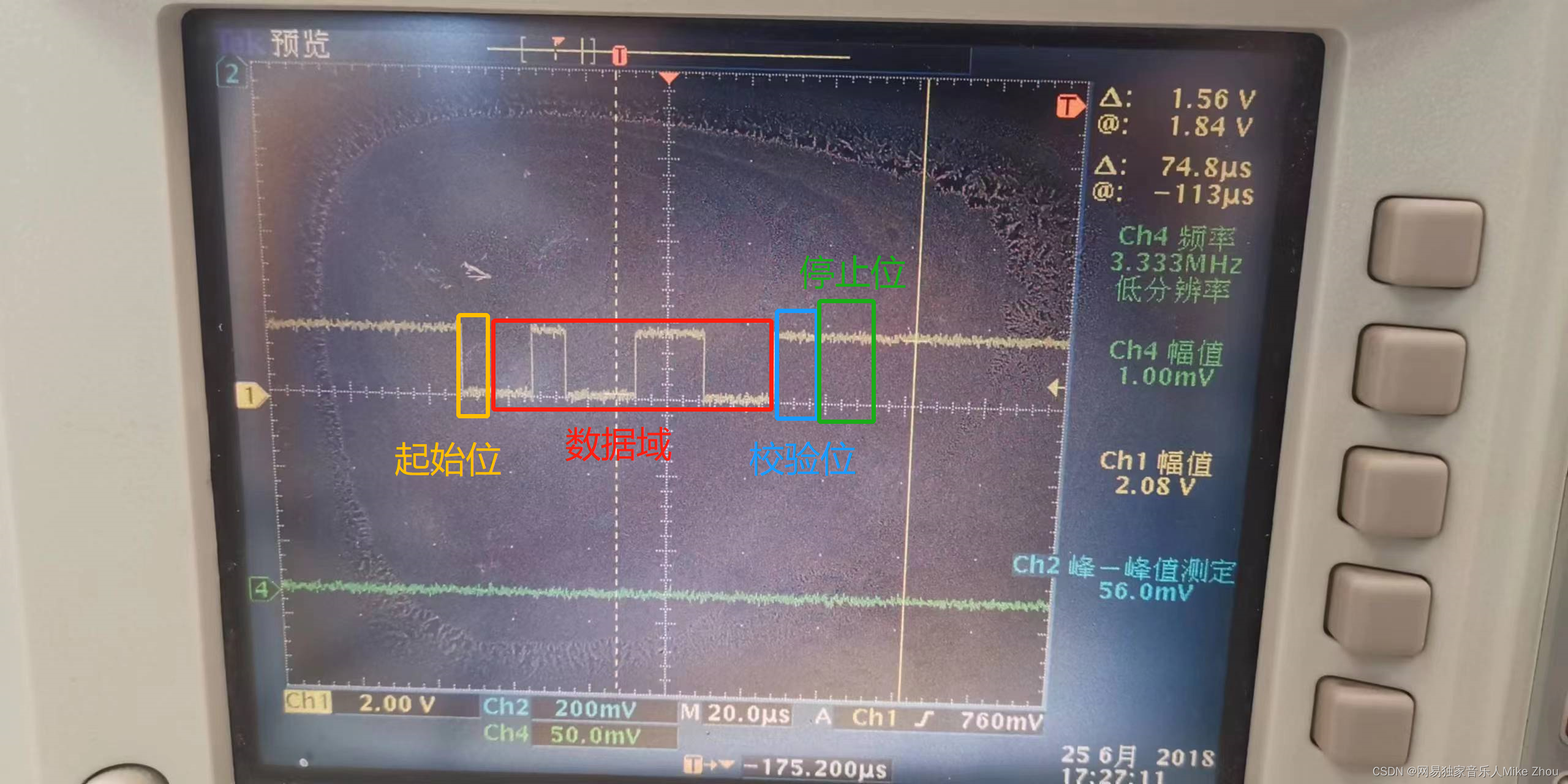
UART协议由四个部分组成:
起始位: 固定低电平 1个时钟周期
数据域: 通常是8bit长度 LSB在前
校验位: 奇校验(odd)和偶校验(even) 也可以没有(none) 通常是无校验位
停止位: 固定高电平 可以是0.5 1 1.5 2个时钟周期 通常是1
比如数据域长度8 停止位1 无校验位 传一个0x32
则发送数据依次是:
0 0100 1100 1
校验位
校验位就是用于计算前面的数据域中 1的个数
奇校验:保证数据域+校验位中1的个数为奇数
偶校验:保证数据域+校验位中1的个数为偶数
上面的例子 加上偶校验的话 校验位为1(前面3个1 所以要加一个1保证为偶数) 所以整体就变成了:
0 0100 1100 1 1
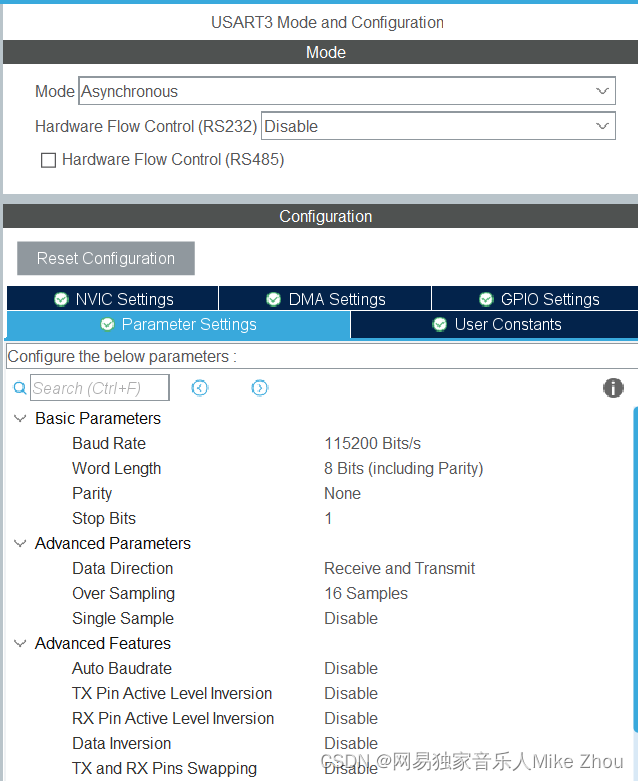
HAL库配置
HAL库的默认配置如下:
发送函数:
HAL_UART_Transmit
接收函数:
HAL_UART_Receive
通常我们用中断的方式来接收
HAL_UART_Receive_IT
含校验位的串口配置BUG避坑
在偶校验配置中 我是这样配置的:

最后发现波形是这样的(发送0x32)
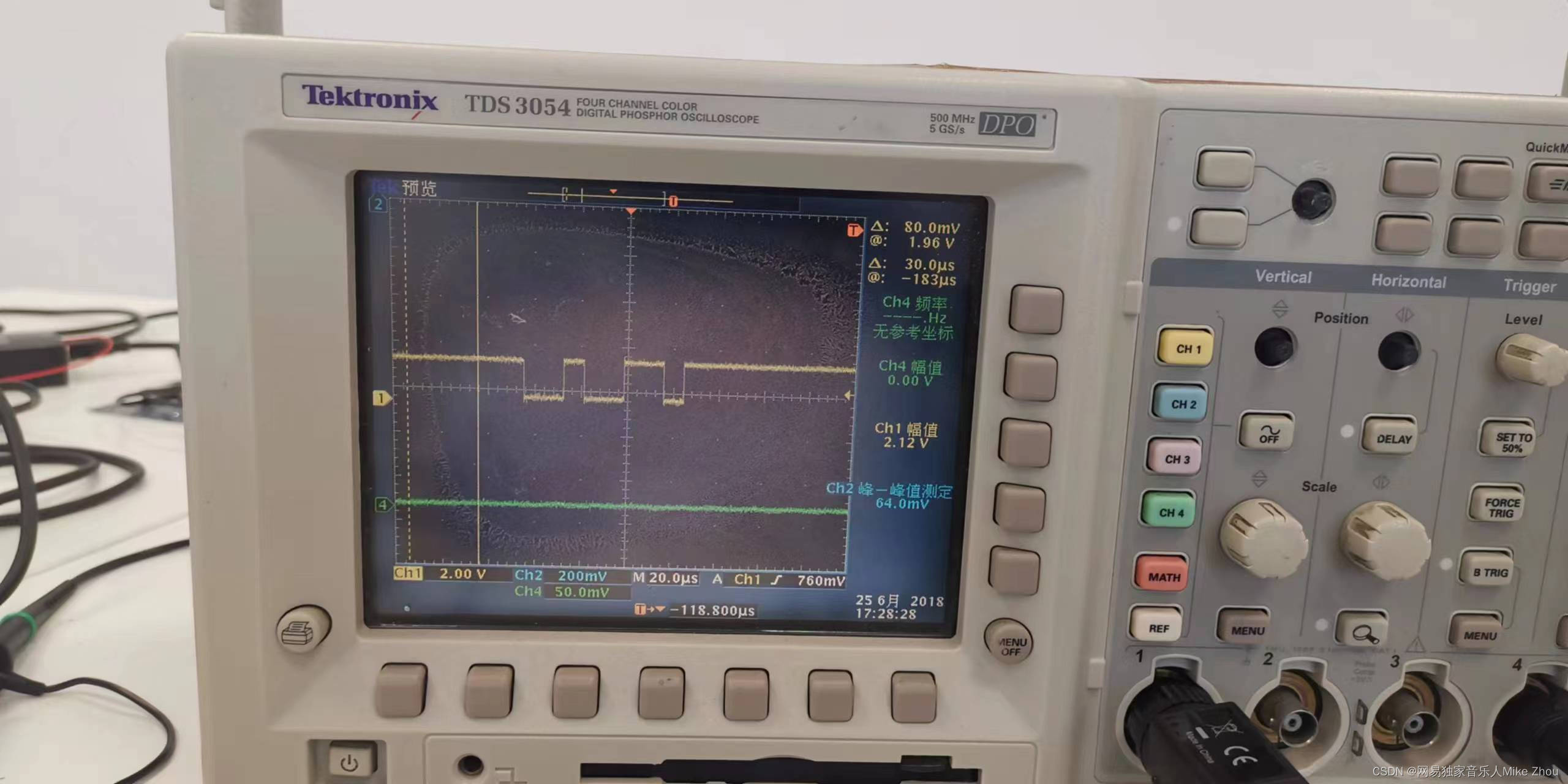
但是 如果我不设置校验位 则是正常的
经过调试后发现 在HAL库使用中 字长word length 指的是数据域+校验位的长度 所以如果按我上面的配置 数据域就只有7位
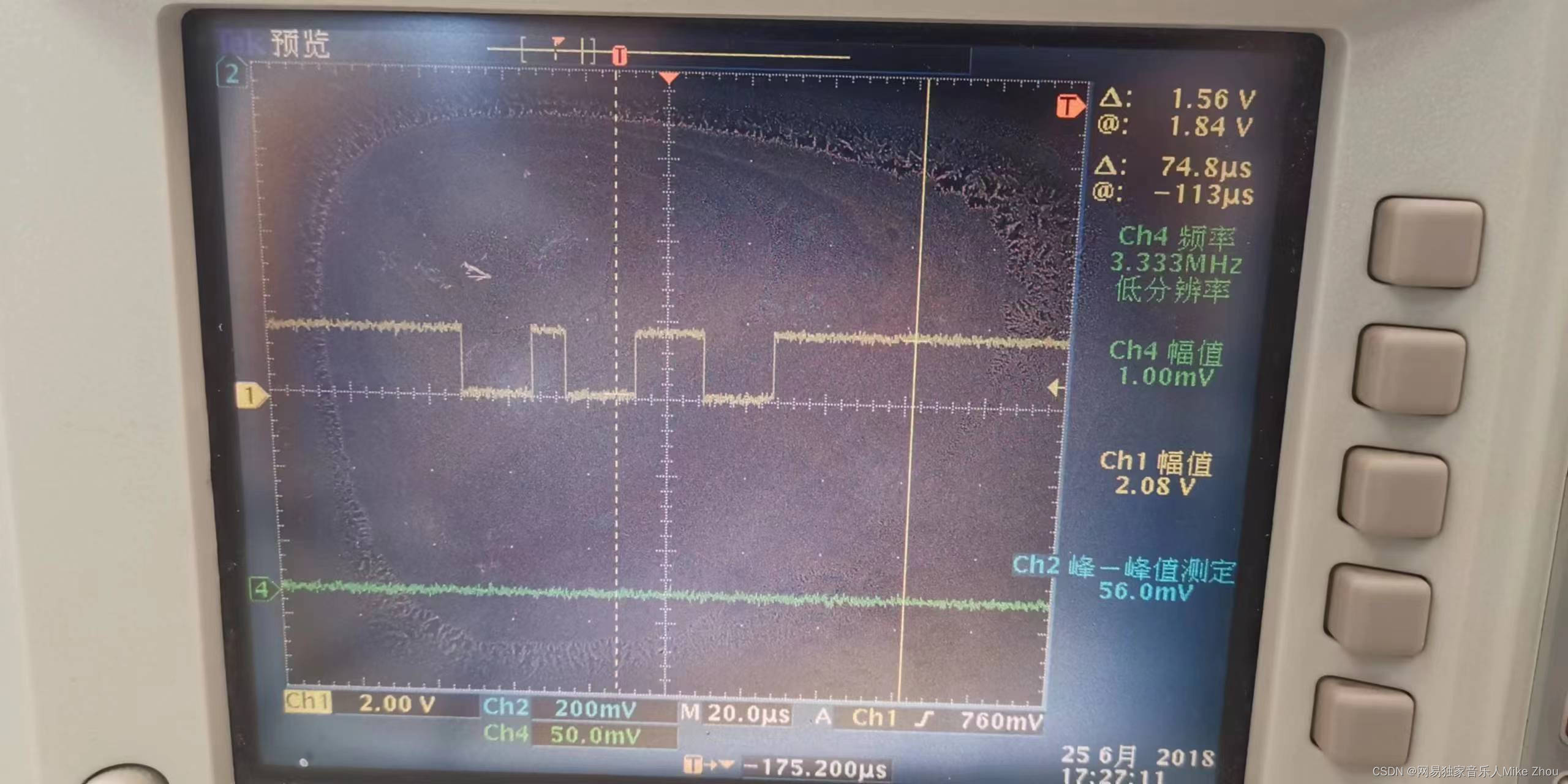
要想发送8位数据域和偶校验的数据 则应该配置为如下:(也就是字长要多一位)

波形也恢复正常:
附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
SysTick系统定时器精准延时
延时函数
SysTick->LOAD中的值为计数值
计算方法为工作频率值/分频值
比如工作频率/1000 则周期为1ms
以ADuCM4050为例:
#include "ADuCM4050.h"void delay_ms(unsigned int ms)
{SysTick->LOAD = 26000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 26000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}其中的52000000表示芯片的系统定时器频率 32系列一般为外部定时器频率的两倍
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
非阻塞延时
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
位带操作
位带代码
M3、M4架构的单片机 其输出口地址为端口地址+20 输入为+16
M0架构的单片机 其输出口地址为端口地址+12 输入为+8
以ADuCM4050为列:
位带宏定义
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) //输出
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) //输入 #define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) //输出
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) //输入 #define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) //输出
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) //输入 #define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) //输出
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) //输入 #define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);#endif总线函数
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{switch(port){case 0:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 1:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 2:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 3:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;default:port=0;break;}
}void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num最大为0xffff
{int i;for(i=0;i<16;i++){GPIO_OUT(port,i,(num>>i)&0x0001);}
}void P0_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P0_O(i)=(num>>i)&0x0001;}
}
unsigned int P0_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P0_I(i)<<i)&0xFFFF;}return num;
}void P1_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P1_O(i)=(num>>i)&0x0001;}
}
unsigned int P1_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P1_I(i)<<i)&0xFFFF;}return num;
}void P2_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P2_O(i)=(num>>i)&0x0001;}
}
unsigned int P2_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P2_I(i)<<i)&0xFFFF;}return num;
}void P3_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P3_O(i)=(num>>i)&0x0001;}
}
unsigned int P3_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P3_I(i)<<i)&0xFFFF;}return num;
}一、位带操作理论及实践
位带操作的概念其实30年前就有了,那还是 CM3 将此能力进化,这里的位带操作是 8051 位寻址区的威力大幅加强版
位带区: 支持位带操作的地址区
位带别名: 对别名地址的访问最终作 用到位带区的访问上(注意:这中途有一个 地址映射过程)
位带操作对于硬件 I/O 密集型的底层程序最有用处
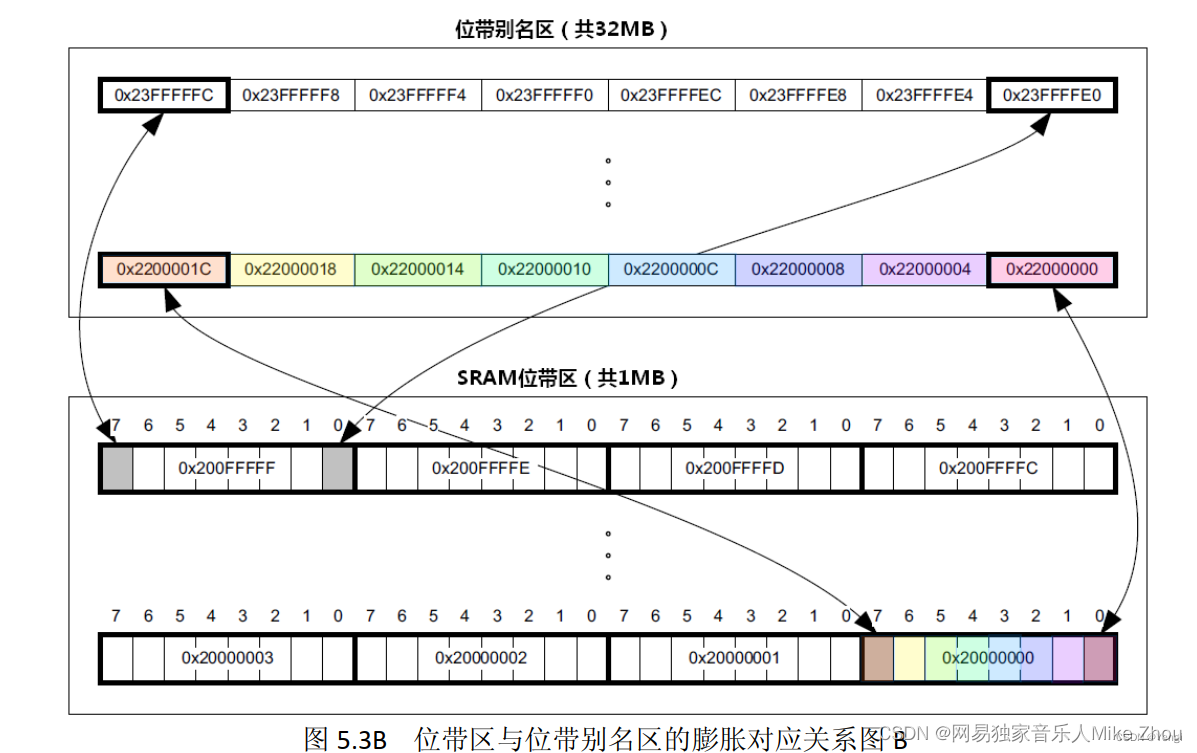
支持了位带操作后,可以使用普通的加载/存储指令来对单一的比特进行读写。在CM4中,有两个区中实现了位带。其中一个是SRAM区的最低1MB范围,第二个则是片内外设区的最低1MB范围。这两个区中的地址除了可以像普通的RAM一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个32位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。
位操作就是可以单独的对一个比特位读和写,类似与51中sbit定义的变量,stm32中通过访问位带别名区来实现位操作的功能
STM32中有两个地方实现了位带,一个是SRAM,一个是片上外设。
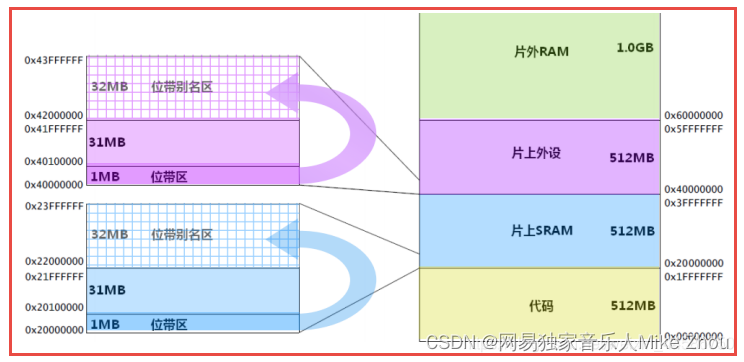
(1)位带本质上是一块地址区(例如每一位地址位对应一个寄存器)映射到另一片地址区(实现每一位地址位对应一个寄存器中的一位),该区域就叫做位带别名区,将每一位膨胀成一个32位的字。
(2)位带区的4个字节对应实际寄存器或内存区的一个位,虽然变大到4个字节,但实际上只有最低位有效(代表0或1)
只有位带可以直接用=赋值的方式来操作寄存器 位带是把寄存器上的每一位 膨胀到32位 映射到位带区 比如0x4002 0000地址的第0个bit 映射到位带区的0地址 那么其对应的位带映射地址为0x00 - 0x04 一共32位 但只有LSB有效 采用位带的方式用=赋值时 就是把位带区对应的LSB赋值 然后MCU再转到寄存器对应的位里面 寄存器操作时 如果不改变其他位上面的值 那就只能通过&=或者|=的方式进行
要设置0x2000 0000这个字节的第二个位bit2为1,使用位带操作的步骤有:
1、将1写入位 带别名区对应的映射地址(即0x22000008,因为1bit对应4个byte);
2、将0x2000 0000的值 读取到内部的缓冲区(这一步骤是内核完成的,属于原子操作,不需要用户操作);
3、将bit2置1,再把值写 回到0x2000 0000(属于原子操作,不需要用户操作)。
关于GPIO引脚对应的访问地址,可以参考以下公式
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
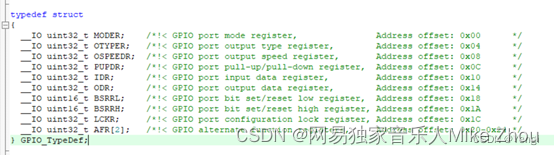
如:端口F访问的起始地址GPIOF_BASE
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)
但好在官方库里面都帮我们定义好了 只需要在BASE地址加上便宜即可
例如:
GPIOF的ODR寄存器的地址 = GPIOF_BASE + 0x14
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
设置PF9引脚的话:
uint32_t *PF9_BitBand =
*(uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR– 0x40000000) *32 + 9*4)封装一下:
#define PFout(x) *(volatile uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR – 0x40000000) *32 + x*4)现在 可以把通用部分封装成一个小定义:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
那么 设置PF引脚的函数可以定义:
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410 #define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
若使PF9输入输出则:
PF_O(9)=1; //输出高电平
uint8_t dat = PF_I(9); //获取PF9引脚的值
总线输入输出:
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}
STM32的可用下面的函数:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "stm32l496xx.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014 #define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010 #define PA_O(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PA_I(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PB_O(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PB_I(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PC_O(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PC_I(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PD_O(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PD_I(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PE_O(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PE_I(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入#define PG_O(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PG_I(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入#define PH_O(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PH_I(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入#define PI_O(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PI_I(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入void PA_BUS_O(unsigned int num);
unsigned int PA_BUS_I(void);void PB_BUS_O(unsigned int num);
unsigned int PB_BUS_I(void);void PC_BUS_O(unsigned int num);
unsigned int PC_BUS_I(void);void PD_BUS_O(unsigned int num);
unsigned int PD_BUS_I(void);void PE_BUS_O(unsigned int num);
unsigned int PE_BUS_I(void);void PF_BUS_O(unsigned int num);
unsigned int PF_BUS_I(void);void PG_BUS_O(unsigned int num);
unsigned int PG_BUS_I(void);void PH_BUS_O(unsigned int num);
unsigned int PH_BUS_I(void);void PI_BUS_O(unsigned int num);
unsigned int PI_BUS_I(void);#endif#include "GPIO.h"void PA_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PA_O(i)=(num>>i)&0x0001;}
}
unsigned int PA_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PA_I(i)<<i)&0xFFFF;}return num;
}void PB_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PB_O(i)=(num>>i)&0x0001;}
}
unsigned int PB_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PB_I(i)<<i)&0xFFFF;}return num;
}void PC_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PC_O(i)=(num>>i)&0x0001;}
}
unsigned int PC_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PC_I(i)<<i)&0xFFFF;}return num;
}void PD_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PD_O(i)=(num>>i)&0x0001;}
}
unsigned int PD_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PD_I(i)<<i)&0xFFFF;}return num;
}void PE_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PE_O(i)=(num>>i)&0x0001;}
}
unsigned int PE_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PE_I(i)<<i)&0xFFFF;}return num;
}void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}void PG_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PG_O(i)=(num>>i)&0x0001;}
}
unsigned int PG_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PG_I(i)<<i)&0xFFFF;}return num;
}void PH_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PH_O(i)=(num>>i)&0x0001;}
}
unsigned int PH_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PH_I(i)<<i)&0xFFFF;}return num;
}void PI_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PI_O(i)=(num>>i)&0x0001;}
}
unsigned int PI_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PI_I(i)<<i)&0xFFFF;}return num;
}二、如何判断MCU的外设是否支持位带
根据《ARM Cortex-M3与Cortex-M4权威指南(第3版)》中第6章第7节描述
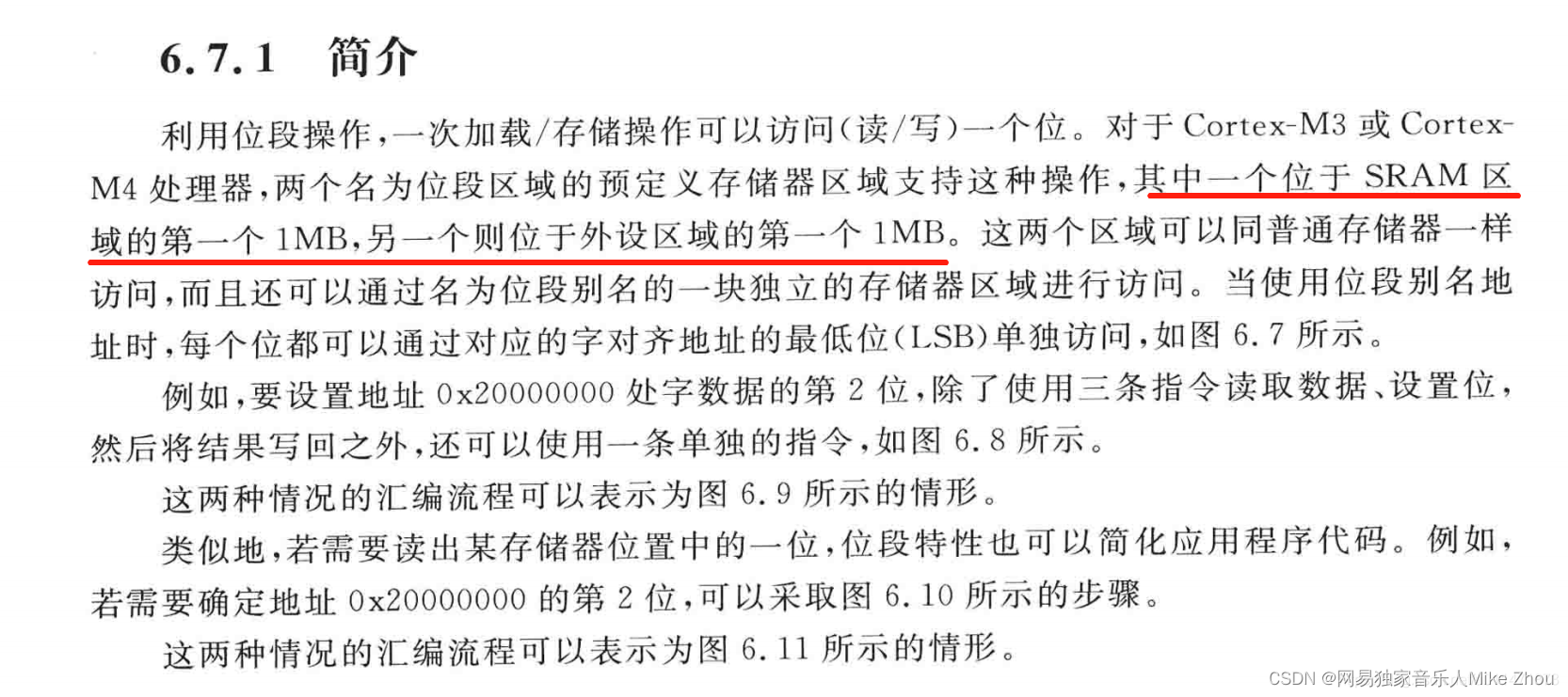
也就是说 要实现对GPIO的位带操作 必须保证GPIO位于外设区域的第一个1MB中
第一个1MB应该是0x4010 0000之前 位带不是直接操作地址 而是操作地址映射 地址映射被操作以后 MCU自动会修改对应寄存器的值
位带区只有1MB 所以只能改0x4000 0000 - 0x400F FFFF的寄存器
像F4系列 GPIO的首地址为0x4002 0000 就可以用位带来更改
STM32L476的GPIO就不行:
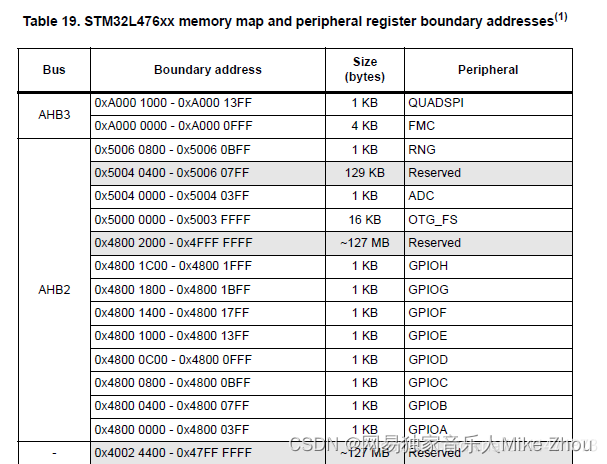
AHB2的都不能用位带
ABP 还有AHB1都可以用
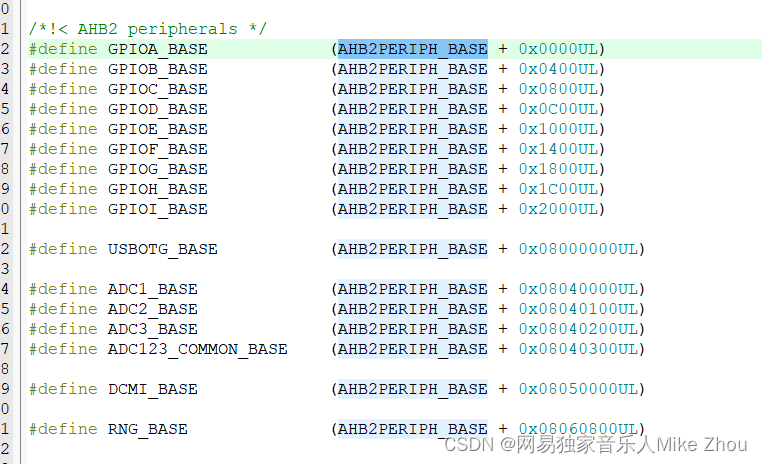
但是L476的寄存器里面 GPIO和ADC都是AHB2
相关文章:
【STM32】HAL库UART含校验位的串口通信配置BUG避坑
【STM32】HAL库UART含校验位的串口通信配置BUG避坑 文章目录 UART协议校验位HAL库配置含校验位的串口配置BUG避坑附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作SysTick系统定时器精准延时延时函数阻塞延时非阻塞延时 位带操作位带代码位带宏定义总线函…...

Python实用技巧:将 Excel转为PDF
将Excel文件转换为PDF可以方便储存表格数据,此外在打印或共享文档时也能确保表格样式布局等在不同设备和操作系统上保持一致。今天给大家分享一个使用第三方Python库Spire.XLS for Python 实现Excel转PDF的简单方法。 实现步骤 首先,通过pip命令来安装依…...

【面经】讲一下你对jvm和jmm的了解
JVM JVM是Java虚拟机,是Java程序的执行环境。它是一种虚拟的计算机,通过在实际的计算机上仿真模拟各种计算机功能来实现. JVM是Java程序运行的核心,可以将Java字节码转换为可执行的机器码,提供了跨平台性、优秀的垃圾回收器&…...
《网络协议》03. 传输层(TCP UDP)
title: 《网络协议》03. 传输层(TCP & UDP) date: 2022-09-04 22:37:11 updated: 2023-11-08 15:58:52 categories: 学习记录:网络协议 excerpt: 传输层、UDP、TCP(可靠传输,流量控制,拥塞控制…...

ZooKeeper调优
服务器硬件配置 建议 Zookeeper 的服务器最好专属(或是资源隔离的)。磁盘由于 Zookeeper 的数据写入磁盘,强烈建议要使用 SSD。 Linux操作系统优化 Zookeeper 的性能会很明显受到交换分区的影响。建议部署 Zookeeper 的服务器关闭交换分区功能或是通过内核参数调整,减少…...
改进YOLOv5:结合ICCV2023|动态蛇形卷积,构建不规则目标识别网络
🔥🔥🔥 提升多尺度、不规则目标检测,创新提升 🔥🔥🔥 🔥🔥🔥 捕捉图像特征和处理复杂图像特征 🔥🔥🔥 👉👉👉: 本专栏包含大量的新设计的创新想法,包含详细的代码和说明,具备有效的创新组合,可以有效应用到改进创新当中 👉👉👉: �…...
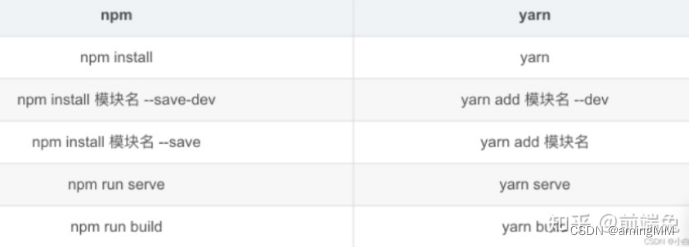
开发知识点-NodeJs-npm/Pnpm/Vite/Yarn包管理器
包管理器 vue-cli-service 不是内部或外部命令,也不是可运行的程序npm 全局变量pnpmPnpm介绍ViteYarn ‘vue-cli-service’ 不是内部或外部命令,也不是可运行的程序 yarn yarn add vue-amap yarn add vue-amap ant-design-vue npm 全局变量 换主机 新…...
Mac上好用的翻译软件推荐 兼容m
Mac翻译软件可以用在学习,工作,生活当中,一款好用的翻译软件,具有翻译准确,翻译快速等基本特点,能够帮您提高工作效率。Mac上有什么好用的翻译软件呢?今天小编为大家整理了6款好用的Mac翻译软件…...

软件下载网站
1.qt 下载官网 Index of /new_archive/qt 2.qt-vs 插件下载 Index of /official_releases/vsaddin...

java获取近期视频流关键帧与截图
1、背景 最近在做视频转发的开发时,遇到一个问题,前端订阅播放h264视频流时,有时会出现一段时间黑屏,经过测试发现是没有收到关键帧,只有第一帧是关键帧才能保证后续播放正常。所以后端需要实现一个功能,就…...
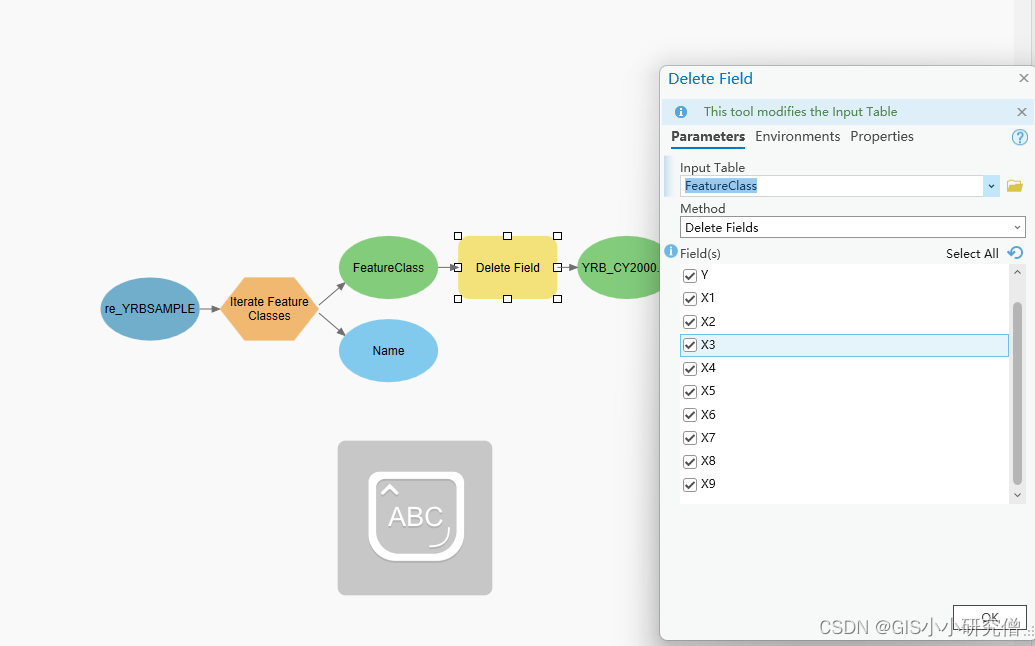
arcgis 批量删除Table中的某些Field
当shp或者table文件较少时,可以手动删除每个文件中的某些字段,当文件较多时,就需要使用arcpy或者model进行处理。...

工厂设备扫码使用售卖联网开发需要怎么开发开源代码?
我们将详细介绍如何使用开源代码开发一套用于工厂设备联网统计的系统。我们将详细讨论所需硬件组件的选择、开源框架和库的使用、软件开发流程以及最后的集成和部署。在这个过程中,我们将提供实用的操作步骤和指导,帮助你更容易地完成这个复杂的任务。 …...

软考高级之132个工具和技术
分类 工具与技术 描述 数据收集 头脑风暴 在短时间内获得大量创意,适用于团队环境,需要引导者引导(过程中可以天马行空,不要打断) 包括:头脑风暴、头脑写作 头脑写作:在开始小组创意讨论之…...

算法通过村第十八关-回溯|白银笔记|经典问题
文章目录 前言组合总和问题分割回文串子集问题排序问题字母大小写全排列单词搜索总结 前言 提示:我不愿再给你写信了。因为我终于感到,我们的全部通信知识一个大大的幻影,我们每个人知识再给自己写信。 --安德烈纪德 回溯主要解决一些暴力枚举…...

vue2 集成 - 超图 - SuperMap iClient3D for WebGL 及常用方法
文章目录 1:下载SuperMap iClient3D for WebGL2:格式化项目中所用的依赖包3:vue2 项目引入4:vue2 页面使用常见方法4.1 创建三维场景,引入在线地图资源,定位到指定位置4.2 坐标拾取4.3 用户输入事件4.4 拾取实体4.5 实体改变监听事件4.6 双击全屏4.7 相机移动事件4.8 添加…...

应用程序服务器/事件驱动编程/CommonJS介绍
目录 应用程序服务器事件驱动编程CommonJS 👍 点赞,你的认可是我创作的动力! ⭐️ 收藏,你的青睐是我努力的方向! ✏️ 评论,你的意见是我进步的财富! 应用程序服务器 应用程序服务器是一种用…...

第二十九章 目标检测中的测试模型评价指标(车道线感知)
前言 近期参与到了手写AI的车道线检测的学习中去,以此系列笔记记录学习与思考的全过程。车道线检测系列会持续更新,力求完整精炼,引人启示。所需前期知识,可以结合手写AI进行系统的学习。 介绍 自动驾驶的一大前提是保证人的安全…...
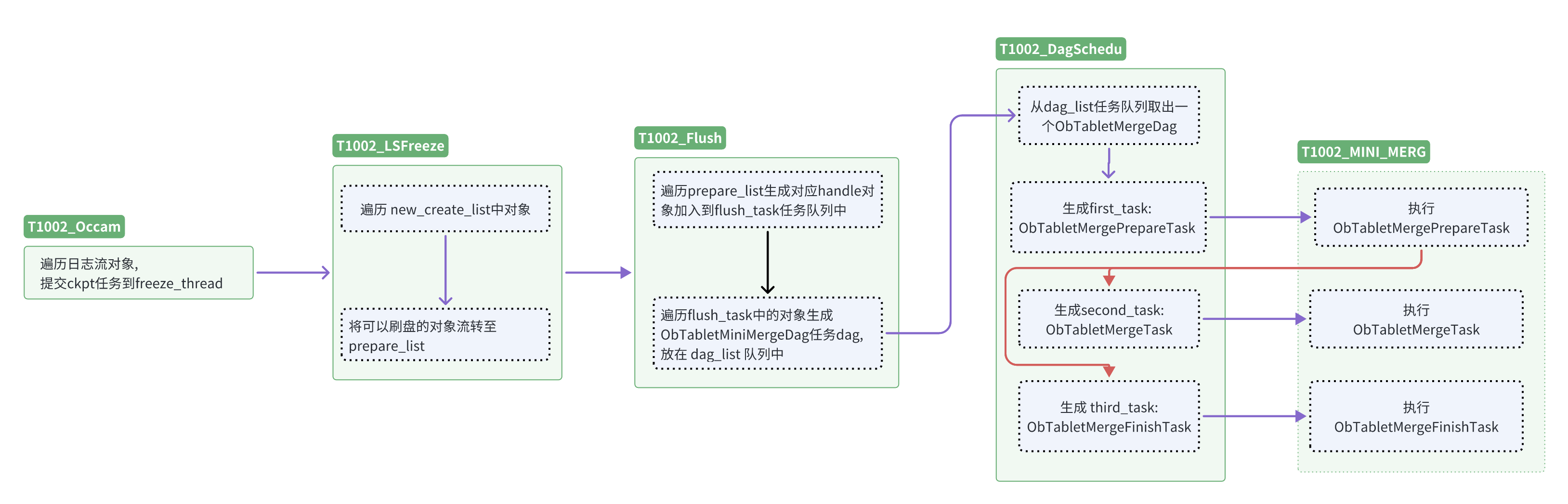
OceanBase 如何通过日志观测冻结转储流程?
本文旨在通过日志解析 OceanBase 的冻结转储流程,以其冻结检查线程为切入点,以租户(1002)的线程名为例。 作者:陈慧明,爱可生测试工程师,主要参与 DMP 和 DBLE 自动化测试项目。 爱可生开源社区…...
深度图(Depth Map)
文章目录 深度图深度图是什么深度图的获取方式激光雷达或结构光等传感器的方法激光雷达RGB-D相机 双目或多目相机的视差信息计算深度采用深度学习模型估计深度 深度图的应用场景扩展阅读 深度图 深度图是什么 深度图(depth map)是一种灰度图像…...

Ubuntu下Anaconda安装
Ubuntu下Anaconda安装 进入anaconda官网 https://www.anaconda.com/ 下载Linux64位版本; 将下载好的".sh"文件放入虚拟机中; 运行指令sudo bash Anaconda3-2023.09-0-Linux-x86_64.sh 此后会自动加载安装程序,中途会停止两次&am…...
)
告别网卡瓶颈:用Xilinx KU060 FPGA和10G/25G Ethernet Subsystem打造你的专属高速UDP网卡(附4套源码)
突破传统网卡极限:基于Xilinx KU060的10G/25G以太网子系统实战指南 在数据中心和云计算领域,网络带宽需求正以惊人的速度增长。传统PCIe网卡虽然性能稳定,但在灵活性、可定制性和成本效益方面存在明显局限。本文将带您探索如何利用Xilinx KU0…...

别再手动写Getter/Setter了!Lombok的@Accessors注解,让你的Java实体类代码更清爽
用Lombok的Accessors注解重构Java实体类:告别冗余代码的优雅实践 在Java开发中,实体类是我们每天都要打交道的对象。想象一下这样的场景:你正在开发一个电商系统,需要定义Product类,包含id、name、price等十几个字段。…...

别再只用border-radius了!用CSS radial-gradient实现Chrome标签页同款反向圆角
突破CSS边界:用radial-gradient打造高级反向圆角设计 在网页设计的细节美学中,圆角处理早已成为提升界面亲和力的标配。但当我们把目光转向Chrome浏览器标签页那种精致的反向圆角效果时,传统的border-radius就显得力不从心了。这种看似简单的…...
)
告别编译报错!保姆级教程:在VS2017/2022中配置Crypto++ 8.8.0静态库(含x64/Release配置)
从零构建Crypto开发环境:Visual Studio深度配置指南 第一次在Visual Studio中集成Crypto的经历往往令人难忘——满屏的"LNK2019"链接错误、"C1083"文件缺失警告,还有那些神秘的运行时崩溃。作为C生态中最负盛名的密码学库࿰…...

Cursor Pro破解工具完整解析:机器标识重置与永久免费解决方案
Cursor Pro破解工具完整解析:机器标识重置与永久免费解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached y…...

如何一键捕获完整网页?这款免费Chrome扩展让你轻松搞定长网页截图
如何一键捕获完整网页?这款免费Chrome扩展让你轻松搞定长网页截图 【免费下载链接】full-page-screen-capture-chrome-extension One-click full page screen captures in Google Chrome 项目地址: https://gitcode.com/gh_mirrors/fu/full-page-screen-capture-c…...

UltimateAndroid自动化测试最佳实践:从入门到精通的完整指南
UltimateAndroid自动化测试最佳实践:从入门到精通的完整指南 【免费下载链接】UltimateAndroid UltimateAndroid is a rapid development framework for developing your apps 项目地址: https://gitcode.com/gh_mirrors/ul/UltimateAndroid UltimateAndroid…...

QuantConnect量化金融实战宝典:从Python入门到策略开发的完整资源库
QuantConnect量化金融实战宝典:从Python入门到策略开发的完整资源库 【免费下载链接】Tutorials Jupyter notebook tutorials from QuantConnect website for Python, Finance and LEAN. 项目地址: https://gitcode.com/gh_mirrors/tutorials2/Tutorials 你是…...

STM32F429裸机跑24轴EtherCAT?实测1ms插补周期下的性能调优与避坑指南
STM32F429裸机实现24轴EtherCAT硬实时控制:1ms插补周期的极限调优实战 当工业机械臂需要同时协调24个关节的精确运动时,每个轴的伺服电机必须在1毫秒内完成位置指令的同步更新——这相当于要求一个裸机运行的STM32F429芯片,在没有RTOS协助的…...
)
保姆级教程:在STM32F407上为FreeRTOS V9.0配置SystemView V3.52(附完整源码包)
STM32F407与FreeRTOS深度集成SystemView全流程实战指南 如果你正在使用STM32F407开发板运行FreeRTOS,却苦于无法直观观察任务调度和中断行为,那么SystemView将成为你的"系统透视镜"。本文将手把手带你完成从零配置到可视化分析的全过程&#…...