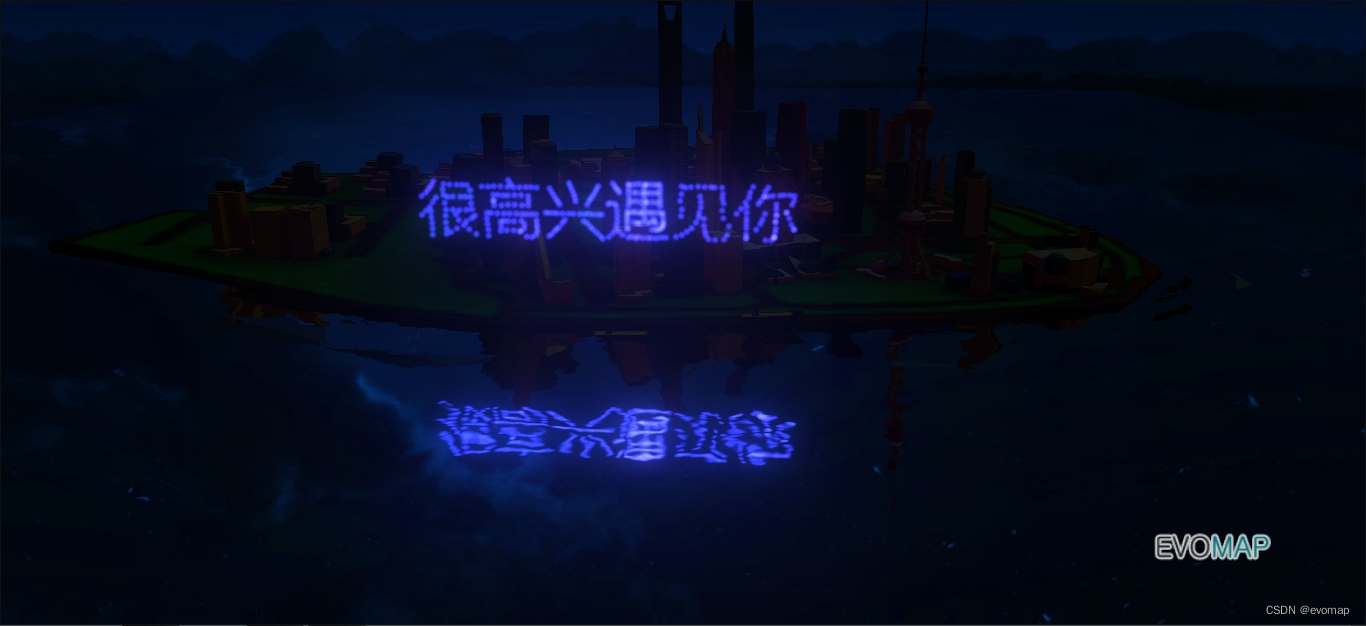
使用EvoMap/Three.js模拟无人机灯光秀
一、创建地图对象
首先我们需要创建一个EM.Map对象,该对象代表了一个地图实例,并设置id为"map"的文档元素作为地图的容器。
let map = new EM.Map("map",{zoom:22.14,center:[8.02528, -29.27638, 0],pitch:71.507,roll:2.01,maxPitch:90,skyImages:[ '../public/imgs/night/posx.jpg', '../public/imgs/night/negx.jpg', '../public/imgs/night/posy.jpg','../public/imgs/night/negy.jpg','../public/imgs/night/negz.jpg','../public/imgs/night/posz.jpg']})map.setLightIntensity(0.1);在地图的构造参数中,可以使用一系列选项来配置地图的初始状态。其中包括:
zoom:设置地图的缩放级别为22.14,这决定了地图的显示比例尺。center:设置地图的中心点坐标为[8.02528, -29.27638, 0],这是一个三维坐标值,表示地图的中心点位置。pitch:设置地图的俯视角度为71.507度,表示地图在垂直方向上的倾斜角度。roll:设置地图的方位角,表示地图围绕Y轴正方向的旋转角度。maxPitch:设置地图的最大俯视角度为90度,限制了地图在垂直方向上的最大倾斜程度。skyImages:设置地图的天空图片,使用了一组图片路径来指定天空的上、下、前、后、左、右六个方向的图片。
接下来的代码调用了 map.setLightIntensity(0.1) 方法,用于设置地图的光照强度设置为默认值的0.1,以降低地图中的光照效果。
二、加载场景
EM.model.Model 是一个用于加载和渲染 3D 模型的类,可以通过传入 URL 参数来加载不同的模型文件,并通过设置坐标、旋转和缩放等参数来放置到地图上。在代码中,我们使用 EM.model.Model 加载了 pudong 模型,并将其添加到了地图上,用于展示具体的建筑物。
let pudong = new EM.model.Model({url:"../public/model/shanghai/pudong.gltf",coordinate:[0,0,3.7],rotate:[90,35,0],scale:[10,10,10]})map.addModel(pudong);pudong.on("loaded",function(){let loadingBar = document.getElementsByClassName("loadingBar")[0];loadingBar.parentNode.removeChild(loadingBar);});EM.mesh.Water 是一个用于创建水面效果的类,可以通过指定位置、宽度和高度等参数来创建一个水面,具有类似于真实水面的波动效果。在这里,我们创建了一个 EM.mesh.Water 对象,并设置其位置和大小,以在地图上显示出水面的效果。
let water = new EM.mesh.Water({position:[0,0,0],width:100,height:100})map.addMesh(water);EM.effect.Bloom 是一个用于创建全屏泛光特效的类。该特效可以通过设置不同的参数,来控制高光的强度、半径和阈值等属性,从而创建出逼真的光影效果。在这里,我们创建了一个 EM.effect.Bloom 对象,并将其添加到地图中,以提升整个场景的视觉效果。
let bloom = new EM.effect.Bloom({strength:1.5,radius:1.2,threshold:0.1});map.addEffect(bloom);三、加载无人机灯光秀模拟数据
3.1.准备数据
我们需要提前需要提前编排无人机轨迹和颜色数据,让无人机按照既定的轨迹和亮度运行,以下是一条模拟数据。
{
"speed":0.5,
"color":["#f00", "#33f"],
"coordinates":[[2.6268,-30.9000,3.6048],[0.6030,-30.9000,3.1729]
]
}这是一组具有速度、颜色和坐标的无人机灯光秀模拟数据,上图的示例数据表示该无人机点位以0.5m/s的速度,位置由[2.6268,-30.9000,3.6048]变化到[0.6030,-30.9000,3.1729],颜色由"#f00"变化到"#33f"。
3.2 添加数据到地图
数据准备完成后,我们可以使用 EM.marker.DynamicPoints类将数据添加到地图中。EM.marker.DynamicPoints 是一个表示动态点图层的类。使用这个类可以快速创建一个具有动态效果的点图层,可用于展示飞机轨迹、交通流量等动态信息。
let points = new EM.marker.DynamicPoints({datas:datas,globalTimeInterval:true,loop:false,pointSize:10,blending:"additive"});map.addObject(points);以下是EM.marker.DynamicPoints每个参数的作用:
a. datas:数据源,用于对接3.1步骤中准备 的数据。
b. globalTimeInterval:全局时间间隔,用于指定动态点的更新速率。如果设置为 true,则所有动态点将以相同的速率更新;否则可以设置每个点的更新速率。
c. loop:循环播放,用于指定动态点是否循环播放。
d. pointSize:点的大小,用于指定每个动态点的大小。
e. blending:混合模式,用于指定动态点的颜色混合模式,可以是 additive(加法混合)或 normal(正常混合)。
四、在线预览
在线预览地址![]() http://111.231.31.134/evomap/demo/cases/uavShow.html
http://111.231.31.134/evomap/demo/cases/uavShow.html
相关文章:
使用EvoMap/Three.js模拟无人机灯光秀
一、创建地图对象 首先我们需要创建一个EM.Map对象,该对象代表了一个地图实例,并设置id为"map"的文档元素作为地图的容器。 let map new EM.Map("map",{zoom:22.14,center:[8.02528, -29.27638, 0],pitch:71.507,roll:2.01,maxPit…...
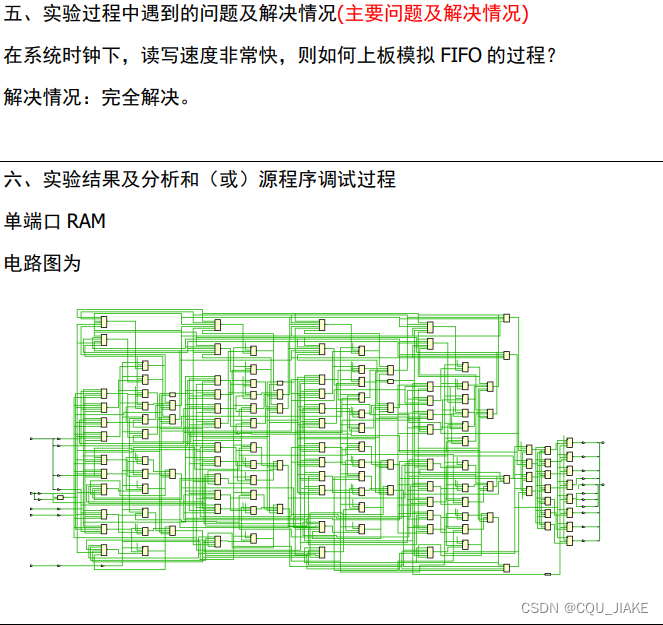
11.9存储器实验总结(单ram,双ram,FIFO)
实验设计 单端口RAM实现 双端口RAM实现 FIFO实现 文件结构为...
安装并使用scrcpy)
linux(ubuntu)安装并使用scrcpy
scrcpy 是一款开源的在计算机上显示和控制 Android 设备的工具。要在 Ubuntu 上使用 scrcpy,你可以按照以下步骤进行安装: 通过命令行安装 scrcpy: 安装 scrcpy: 打开终端(Terminal)并执行以下命令来安装…...

linux rsyslog安装配置
syslog是Linux系统默认的日志守护进程。默认的syslog配置文件是/etc/rsyslog.conf文件。syslog守护进程是可配置的,它允许人们为每一种类型的系统信息精确地指定一个存放地点。syslog使用UDP 514/TCP 514端口。 1.环境信息 环境信息 HostnameIpAddressOS versionModuleNoterh…...

美国Embarcadero公司正式发布2023 RAD Studio Delphi C++ Builder 12 Athens
Embarcadero 非常高兴地宣布发布 RAD Studio 12 Athens 以及 Delphi 12 和 CBuilder 12。RAD Studio 12 Athens 版本包含令人兴奋的新功能,为该产品的未来奠定了基础。 目录 主要新功能 C 的奇妙之处Delphi 的一些不错的补充FireMonkey 和 Skia 作为新基金会采用 MD…...

树莓派4B的测试记录(CPU、FFMPEG)
本文是用来记录树莓派 4B 的一些测试记录。 温度 下面记录中的风扇和大风扇是这样的: 为什么要用大风扇呢?因为小风扇在外壳上,气流通过外壳的珊格会有啸叫,声音不大但是很烦人,大风扇没这个问题,并且同样…...

物联网AI MicroPython学习之语法 二进制与ASCII转换
学物联网,来万物简单IoT物联网!! ubinascii 介绍 ubinascii模块实现了二进制数据与各种ASCII编码之间的转换。 接口说明 a2b_base64 - 解码base64编码的数据 函数原型:ubinascii.a2b_base64(data)注意事项: 在解码…...
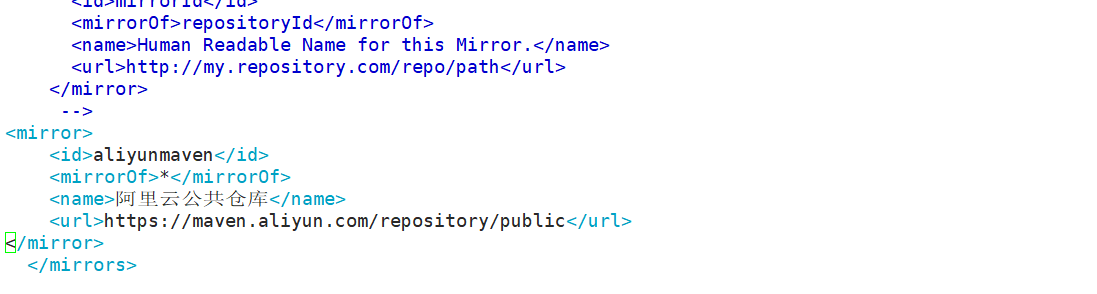
学之思项目的搭建部署 打jar包失败的解决方法
学之思系统介绍部署java环境安装maven安装node.js前端打包工具命令npmGit命令获取源代码安装配置mysql前端打包打包jar包服务上线!!!打jar包失败的解决方法 学之思系统介绍 学之思开源考试系统是一款 java vue 的前后端不分离的考试系统。主要优点是开发、部署简单快捷、界面…...
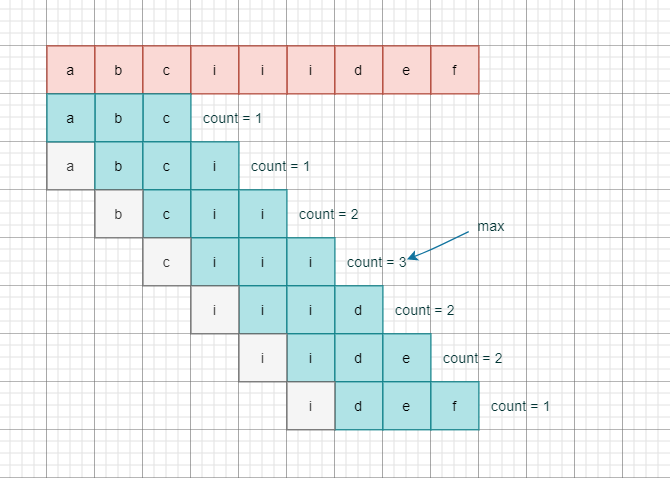
[100天算法】-定长子串中元音的最大数目(day 67)
题目描述 给你字符串 s 和整数 k 。请返回字符串 s 中长度为 k 的单个子字符串中可能包含的最大元音字母数。英文中的 元音字母 为(a, e, i, o, u)。示例 1:输入:s "abciiidef", k 3 输出:3 解释…...
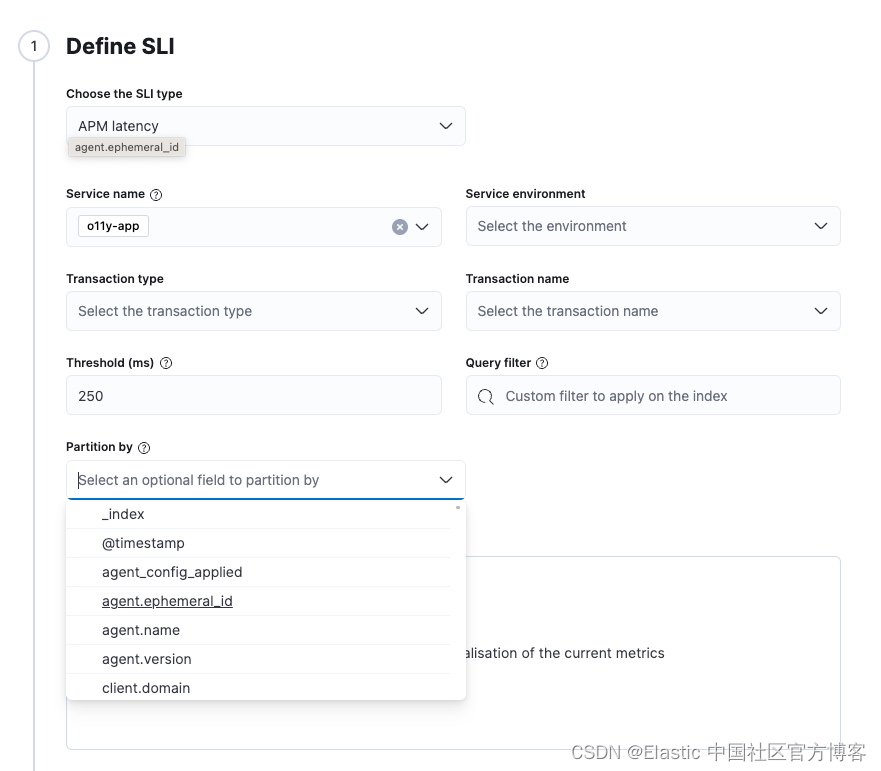
Elastic Observability 8.11:ES|QL、APM 中的通用分析和增强的 SLOs
作者:Tom Grabowski, Katrin Freihofner, Israel Ogbole Elastic Observability 8.11 引入了 ES|QL for Observability(技术预览版)、Universal ProfilingTM 和 Elastic APM 集成,以及针对 Elastic Observability 的新 SLO &#…...
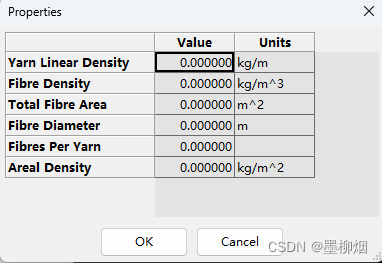
TexGen简单模型对应inp文件简单梳理-2
模型 默认最简单的编织复材,编辑材料属性时发现基体属性设置正常,各向同性材料,但是纱线的材料属性却没有弹性性能的设置。 导出inp文件后,导入ABAQUS中其实可以看到有两种材料,纱线也是有属性的。 ABAQUS中修改属性的…...
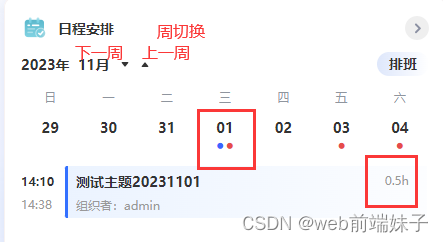
VUE获取当前日期的周日和周六
<template><div><div click"handleLast()">上一周</div><div click"handleNext()">下一周</div><el-calendarref"monChild"v-model"value":first-day-of-week"7":range"[sta…...

K8S篇之k8s containerd模式fail to pull image certificate signed by unknown authority
"k8s containerd模式fail to pull image certificate signed by unknown authority"的问题 解决方案:您有两个选择:配置证书或禁用证书验证。 配置证书:您可以为 containerd 配置证书,使其信任由未知机构签名的证书。 具…...
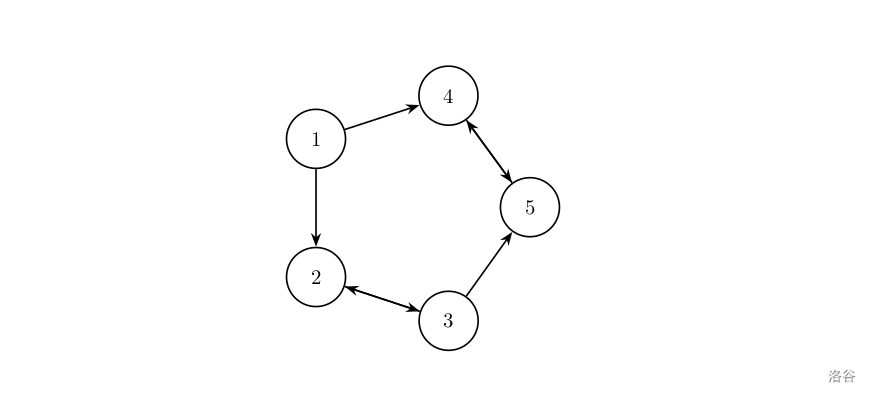
算法进阶指南图论 最优贸易
最优贸易 题目描述 C C C 国有 n n n 个大城市和 m m m 条道路,每条道路连接这 n n n 个城市中的某两个城市。任意两个城市之间最多只有一条道路直接相连。这 m m m 条道路中有一部分为单向通行的道路,一部分为双向通行的道路,双向通行的…...

【Android】Debug时禁用主线程ANR限制
ANR全称Application Not Response,指主线程超过5s无响应,应用会自动退出 由于这个线程,如果我们给主线程加了断点,就会触发ANR,导致调试时应用退出 这样调试起来会非常麻烦,其实对于Debug应用,…...

P6入门:项目初始化1-项目详情介绍
前言 使用项目详细信息查看和编辑有关所选项目的详细信息,在项目创建完成后,初始化项目是一项非常重要的工作,涉及需要设置的内容包括项目名,ID,责任人,日历,预算,资金,分类码等等&…...
进行 “最佳价格查询器” 的开发
前置条件 public class Shop {private final String name;private final Random random;public Shop(String name) {this.name name;random new Random(name.charAt(0) * name.charAt(1) * name.charAt(2));}public double getPrice(String product) {return calculatePrice…...

Brain Teaser概率类 - 三局两胜制
问题 三局两胜制比赛,两局结束还是三局结束的概率大? 解答 假设每局比赛的结果是独立同分布的,且遵循伯努利分布,其中一方的胜率为p,另一方为1-p. 则两局结束的概率是 p 2 ( 1 − p ) 2 ≥ 0.5 p^2 (1-p)^2 \geq …...

在现实生活中传感器GV-H130/GV-21的使用
今天,收获了传感器GV-H130/GV-21,调试探头的用法,下面就来看看吧!如有不妥欢迎指正!!!! 目录 传感器GV-H130/GV-21外观 传感器调试探头 探头与必要准备工作 传感器数值更改调试 …...

海康Visionmaster-全局脚本:通过通讯触发快速匹配 模块换型的方法
如何实现根据通讯信号切换快速匹配的模型文件并触发流程执行? 1.动态切换模板需在全局脚本中调用相关接口实现,可以在全局脚本的通讯数据接收回调中实现代码逻辑,代码如下。 C# using System; using VM.GlobalScript.Methods; using System.…...

从 UI 中心到 Agent-to-Agent MCP 设计的实战路径
过去三年,我亲眼看着 Ramp 的 MCP 周活跃用户在短短三个月内暴增 10 倍,客户不再打开浏览器,而是直接让 Claude、ChatGPT 等 Agent 代为操作整个财务系统。几乎同一时间,Salesforce 在 TDX 大会上推出 Headless 360,把…...

Optuna超参数优化:提升机器学习模型调优效率
1. 超参数优化入门:为什么选择Optuna?在机器学习项目中,模型调优往往是最耗时的环节之一。传统网格搜索(Grid Search)和随机搜索(Random Search)虽然简单直接,但当参数空间较大时,这两种方法要么计算成本过高ÿ…...

并查集
1.并查集原理 在一些应用问题中,需要将n个不同的元素划分成一些不相交的集合。开始时,每个元素自成一个单元素集合,然后按一定的规律将归于统一组元素的集合合并。在此过程中要反复用到查询某一个元素归属于那个集合的运算。适合于描述这类问…...

超好用的截图工具——Snipaste
文章目录超好用的截图工具——Snipaste核心定位安全下载极简安装与基础配置(1分钟搞定)安装开机自启核心快捷键关闭不必要的提醒核心功能全流程实操① 基础截图 标注② 灵魂功能——贴图(效率核心)典型使用场景超好用的截图工具—…...

OceanBase-Desktop-Setup-1.0.0.exe
Microsoft Windows [版本 10.0.19045.6456] (c) Microsoft Corporation。保留所有权利。C:\Users\Administrator>wsl --status 此应用程序需要适用于 Linux 的 Windows 子系统可选组件。 通过运行安装它: wsl.exe --install --no-distribution 可能需要重新启动系…...

AI时代软件开发范式变革:从代码编写到智能体指挥官的转型
1. 从“码农”到“指挥官”:AI时代软件开发的范式转移 如果你最近还在埋头一行行地敲代码,或者觉得AI编程助手只是个“高级一点的自动补全”,那可能已经有点落伍了。我最近花了不少时间研究斯坦福CS146S课程《现代软件开发者》的核心内容&…...

从‘迁就’到‘协同’:深入理解PCIe设备枚举时,MPS与MRRS的‘谈判’过程与系统影响
从‘迁就’到‘协同’:深入理解PCIe设备枚举时,MPS与MRRS的‘谈判’过程与系统影响 当一台计算机从冷启动到完成操作系统加载,背后隐藏着一场精密而复杂的硬件"对话"。这场对话的核心参与者之一,便是PCI Express总线上的…...

新能源汽车专业升级,仿真教学软件科学布局指南
随着新能源汽车保有量突破3000万辆,产业迭代进入快车道,高压电池、电机电控、智能网联等核心技术持续更新,职业院校新能源汽车专业升级已迫在眉睫。一边是产业对技能人才的迫切需求——据测算,2025年国内新能源汽车维修技师缺口至…...

DLSS Swapper完全指南:终极游戏性能优化神器
DLSS Swapper完全指南:终极游戏性能优化神器 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper DLSS Swapper是一款专业的DLSS版本管理工具,让普通玩家也能轻松切换游戏中的DLSS动态链接库文件&…...

NVIDIA Isaac Sim 5.0与Isaac Lab 2.2:机器人仿真与训练技术解析
1. NVIDIA Isaac Sim 5.0与Isaac Lab 2.2全面解析:机器人仿真与训练的新纪元在机器人开发领域,仿真环境的重要性不言而喻。它不仅是算法验证的安全沙盒,更是加速研发周期的关键工具。NVIDIA最新发布的Isaac Sim 5.0和Isaac Lab 2.2标志着机器…...