机器人入门(五)—— 仿真环境中操作TurtleBot
仿真环境中操作TurtleBot
- 一、实操
- 1.1 查看姿态信息
- 1.2 控制turtlebot移动的三种方式
- 1.2.1 命令行发布指令
- 1.2.2 键盘操控
- 1.2.3 Python脚本控制
- 1.2.4 使用rqt工具界面,发布运动指令
- 二、里程计(odometry)
- TurtleBot3 仿真
进行实操之前,先准备环境
$ sudo apt install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-turtlebot-simulator ros-kinetic-kobuki-ftdi ros-kinetic-turtlebot-gazebo
一、实操
1.1 查看姿态信息
环境准备好后,执行以下命令启动
$ roslaunch turtlebot_gazebo turtlebot_world.launch
可以看见以下效果,视角不舒服的话,就按Ctrl+Shift+鼠标左键调整调整至你喜欢的视角,并通过滚轮缩放大小。
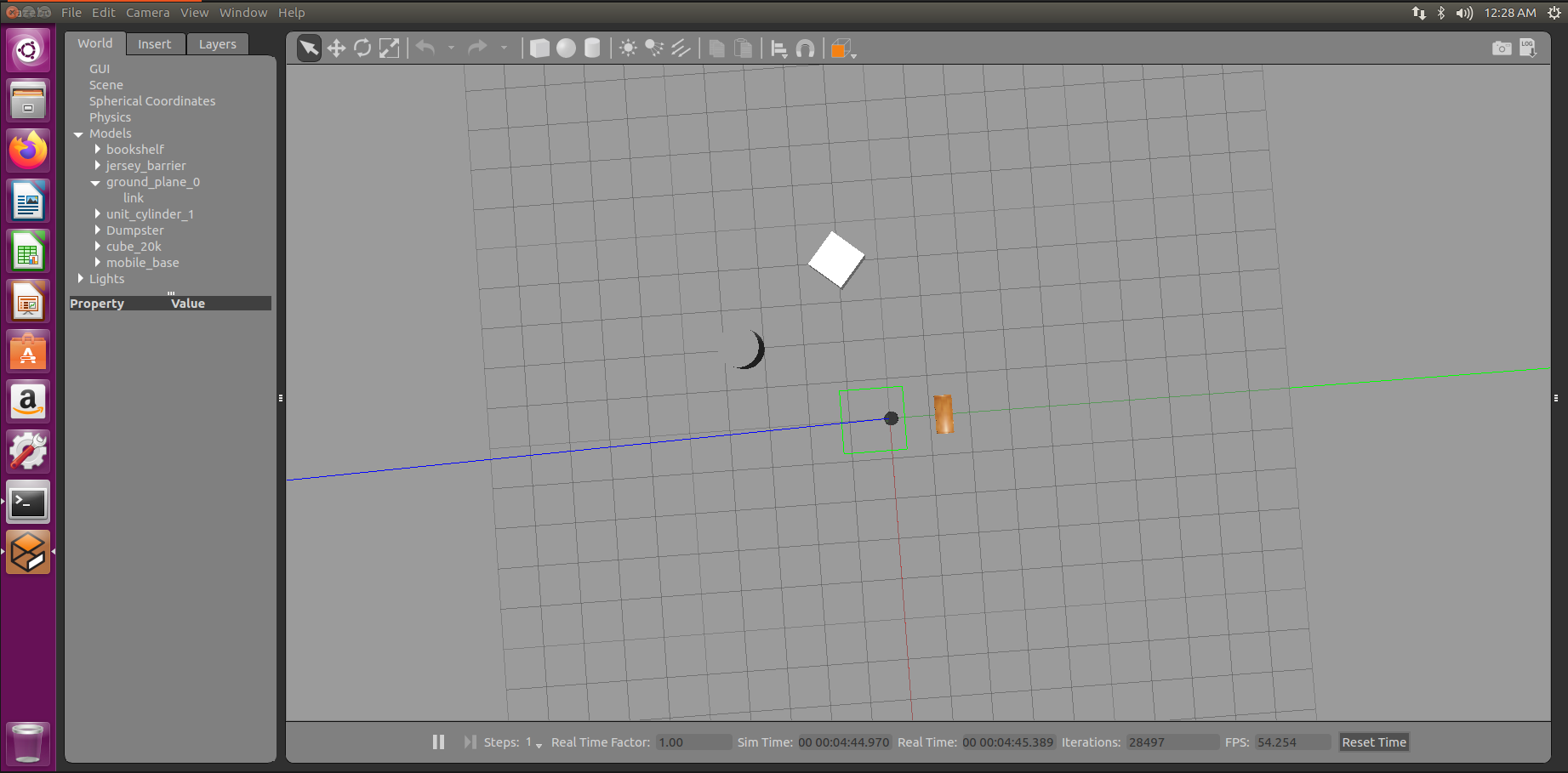

按如下顺序点击,TurtleBot将被一个白色框线框住,并可以查看姿态信息
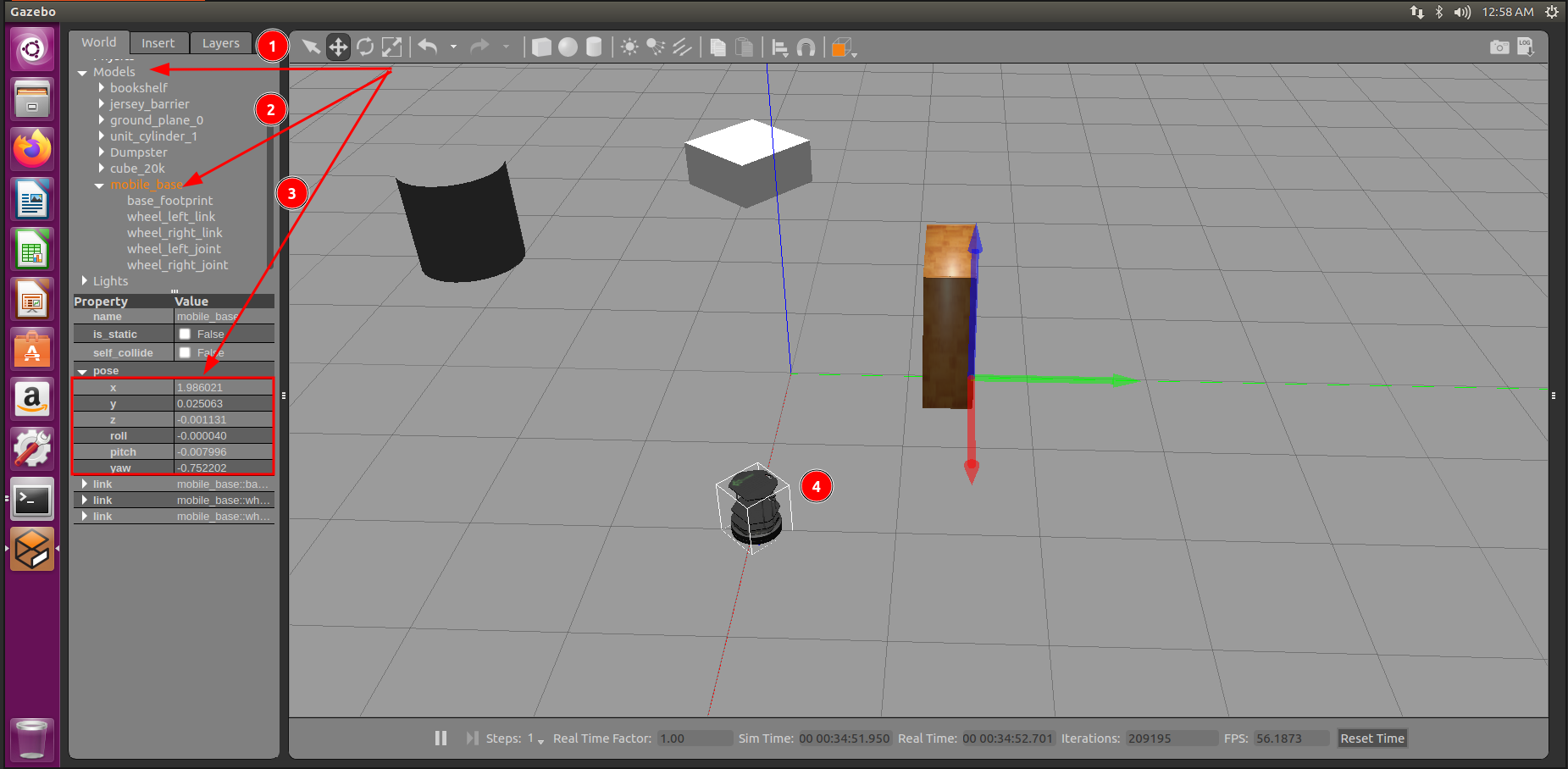
也可以用以下命令,打印出mobile_base的姿态信息,注意到,由于车应该是放置在水平面上的,position.z的值本应该是0,这里却是一串-0.00113074128666的小数,原因是什么呢?是ROS的缺陷吗?//@TODO,此问题待解答,然后看到orientation的x,y,z,w,这被称作四元数(quaternion),用来表示三维空间里的旋转,关于四元数如何表示三维空间里的旋转,见《二维空间与三维空间的姿态表示法》
$ rosservice call gazebo/get_model_state '{model_name: mobile_base}'
header: seq: 1stamp: secs: 1945nsecs: 170000000frame_id: ''
pose: position: x: 1.97484093771y: 0.0147819206239z: -0.00113074128666orientation: x: -0.00134519341326y: -0.00376571136568z: -0.348703846748w: 0.937224432639
twist: linear: x: -0.000155242355429y: -0.000224370086231z: -4.28258194336e-06angular: x: -0.0023805996017y: 0.00191483013878z: 0.000121453647707
success: True
status_message: "GetModelState: got properties"1.2 控制turtlebot移动的三种方式
1.2.1 命令行发布指令
可以看到,这个名字叫做mobile_base的link(连接刚体),根据之前操作小乌龟的文章,我们要先找到有哪些node在跑,然后再找到对应的有哪些topic在publish和被subscribe,去控制mobile_base,开始,我们干脆看图说话。
rosrun rqt_graph rqt_graph
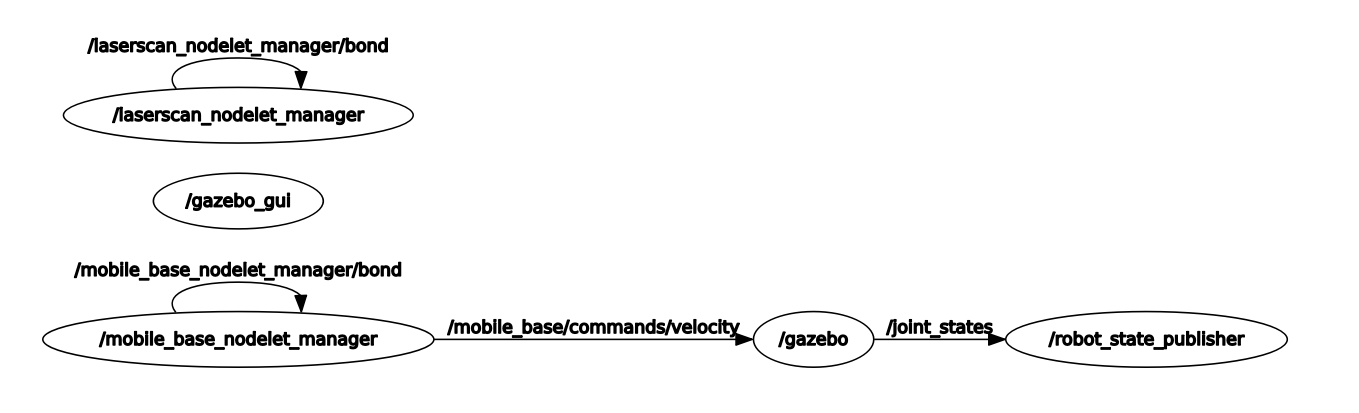 目的很明确,要找的node就应该是
目的很明确,要找的node就应该是/gazebo了,我原本以为,这里会有一个结点应该叫mobile_base,但想了想,它应该被整个包含在/gazebonode环境里面了,所以/gazebo这个node还是有非常多子结构,不然一个孤零零的/gazebo,怎么完成这么多物体的操作呢?
$ rosnode list
/gazebo #忽略
/gazebo_gui #忽略
/laserscan_nodelet_manager
/mobile_base_nodelet_manager #可能是
/robot_state_publisher
/rosout #忽略
继续,信息有点多,但是我们还是只需要看Subscriptions这个,服从命令听指挥是优良作风,看名字的话,在上面rqt_graph图中所见到的的topic正是/mobile_base/commands/velocity,哦这里连message的数据类型都给出来了是geometry_msgs/Twist,
$ rosnode info /gazebo
--------------------------------------------------------------------------------
Node [/gazebo]
Publications: * /camera/depth/camera_info [sensor_msgs/CameraInfo]* /camera/depth/image_raw [sensor_msgs/Image]
...
...Subscriptions: * /clock [rosgraph_msgs/Clock]* /gazebo/set_link_state [unknown type]* /gazebo/set_model_state [unknown type]* /mobile_base/commands/motor_power [unknown type]* /mobile_base/commands/reset_odometry [unknown type]* /mobile_base/commands/velocity [geometry_msgs/Twist]
...
...
那么就有的放矢了,发布命令
$ rostopic pub -r 10 /mobile_base/commands/velocity /geometry_msgs/Twist '{linear: {x: 0.2}}'

1.2.2 键盘操控
执行下面的命令,可以用键盘操作
$ roslaunch turtlebot_teleop keyboard_teleop.launch

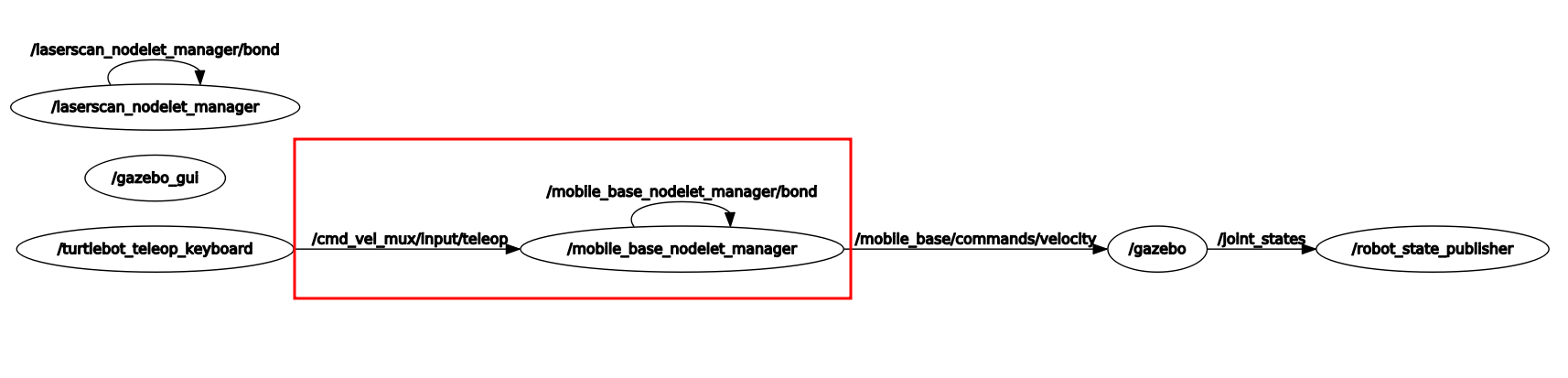
 但这个package是turtlebot_teleop有什么说法和依据吗?为什么执行的是它,答案是没有,代码开发时的设计如此,来看最新的
但这个package是turtlebot_teleop有什么说法和依据吗?为什么执行的是它,答案是没有,代码开发时的设计如此,来看最新的rqt_graph,所以这建立在你非常了解你所要运行的仿真环境基础上,才能做到用键盘操作,不然琢磨半天也不会知道如何使用键盘去操作这个turtlebot。
1.2.3 Python脚本控制
西天取经,孙悟空总算是要拿到他的如意金箍棒了,有了程序,才叫编程,有了金箍棒,孙悟空才能大闹天宫,可孙悟空终会有取到经书的一刻,那时,不只是涅盘成佛,也是大圣的寂灭。
创建一份ControlTurtleBot.py,内容为:
#!/usr/bin/env python
# Execute as a python script
# Set linear and angular values of TurtleBot's speed and turning.
import rospy # Needed to create a ROS node
from geometry_msgs.msg import Twist # Message that moves baseclass ControlTurtleBot():def __init__(self):# ControlTurtleBot is the name of the node sent to the #masterrospy.init_node('ControlTurtleBot', anonymous=False)# Message to screenrospy.loginfo("Press CTRL+c to stop TurtleBot")# Keys CNTL + c will stop script #这里的self.shutdown是一个函数地址rospy.on_shutdown(self.shutdown)# Publisher will send Twist message on topic cmd_vel_mux/input/naviself.cmd_vel = rospy.Publisher('cmd_vel_mux/input/navi',Twist, queue_size=10)# TurtleBot will receive the message 10 times per second.rate = rospy.Rate(10);# 10 Hz is fine as long as the processing does not exceed# 1/10 second.# Twist is geometry_msgs for linear and angular velocitymove_cmd = Twist()move_cmd.linear.x = 0.3# Modify this value to change speed# Turn at 0 radians/smove_cmd.angular.z = 0# Modify this value to cause rotation rad/s# Loop and TurtleBot will move until you type CNTL+cwhile not rospy.is_shutdown():# publish Twist values to TurtleBot node /cmd_vel_muxself.cmd_vel.publish(move_cmd)# wait for 0.1 seconds (10 HZ) and publish againrate.sleep()def shutdown(self):# You can stop turtlebot by publishing an empty Twist# messagerospy.loginfo("Stopping TurtleBot")self.cmd_vel.publish(Twist())# Give TurtleBot time to stoprospy.sleep(1)if __name__ == '__main__':try:ControlTurtleBot()except:rospy.loginfo("End of the trip for TurtleBot")
然后赋予执行权限,并用python解释执行,然后小车就会沿着它自身坐标系的x轴方向一直前进。
$ chmod +x ControlTurtleBot.py
$ python ControlTurtleBot.py
1.2.4 使用rqt工具界面,发布运动指令
rqt = ROS Qt GUI Toolkit,
$ rqt
然后在插件选项栏里,将Message Publisher与Topic Monitor调出来
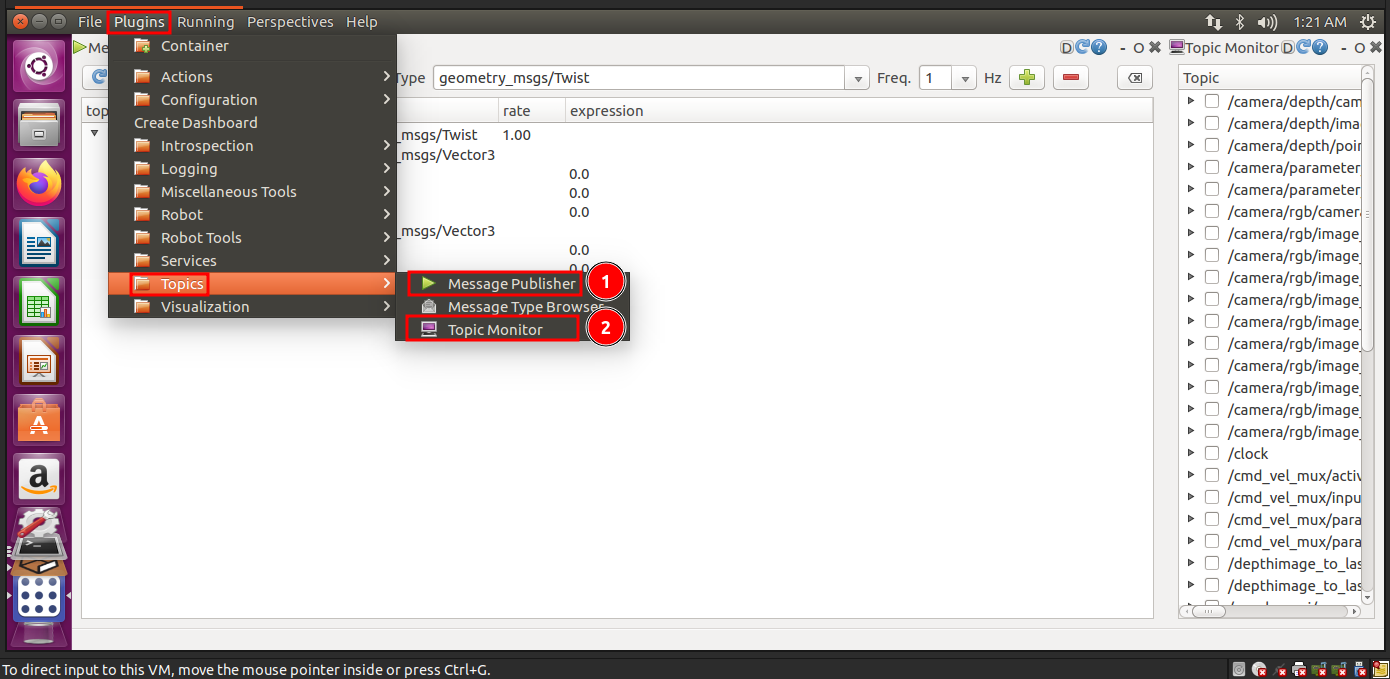 并选择对应的Topic和Message Type,设置数据值,然后勾选发布
并选择对应的Topic和Message Type,设置数据值,然后勾选发布
 另外rqt这个工具可以让你跟踪发布的message,一旦TurtleBot的行动不是你预期的那样,你可以进行debug排查原因。
另外rqt这个工具可以让你跟踪发布的message,一旦TurtleBot的行动不是你预期的那样,你可以进行debug排查原因。
二、里程计(odometry)
这个odometry是用来估计mobile robot当前所处位置,和起点之间的距离和姿态变化,当mobile robot走了一段较长的距离时,这个数据会变得不准,原因可能是车轮的直径参数有误,或者路不平导致车轮的转换器输出了不准确的数据,书上给了一篇IEEE Transactions on Robotics and Automation(IEEE TRO)收录的论文,对这个问题有较为详尽的讨论 Measurement and Correction of Systematic Odometry Errors in Mobile Robots.pdf,这篇文章还讨论了轴距(wheelbase)的影响。
这是一作老头子的个人主页 Johann Borenstein。
首先,查看/odom这个topic使用的message,结果显示是nav_msgs/Odometry,再看nav_msgs/Odometry的数据格式
$ rostopic type /odom
nav_msgs/Odometry
$ rosmsg show nav_msgs/Odometry
std_msgs/Header headeruint32 seqtime stampstring frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance posegeometry_msgs/Pose posegeometry_msgs/Point positionfloat64 xfloat64 yfloat64 zgeometry_msgs/Quaternion orientationfloat64 xfloat64 yfloat64 zfloat64 wfloat64[36] covariance
geometry_msgs/TwistWithCovariance twistgeometry_msgs/Twist twistgeometry_msgs/Vector3 linearfloat64 xfloat64 yfloat64 zgeometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 zfloat64[36] covariance用以下命令可以使turtlebot归位
# 1.查找归位topic对应的message
$ rostopic type /mobile_base/commands/reset_odometry
std_msgs/Empty
# 2.命令mobile_base归位
$ rostopic pub /mobile_base/commands/reset_odometry std_msgs/Empty
$ rostopic echo /mobile_base/sensors/imu_data
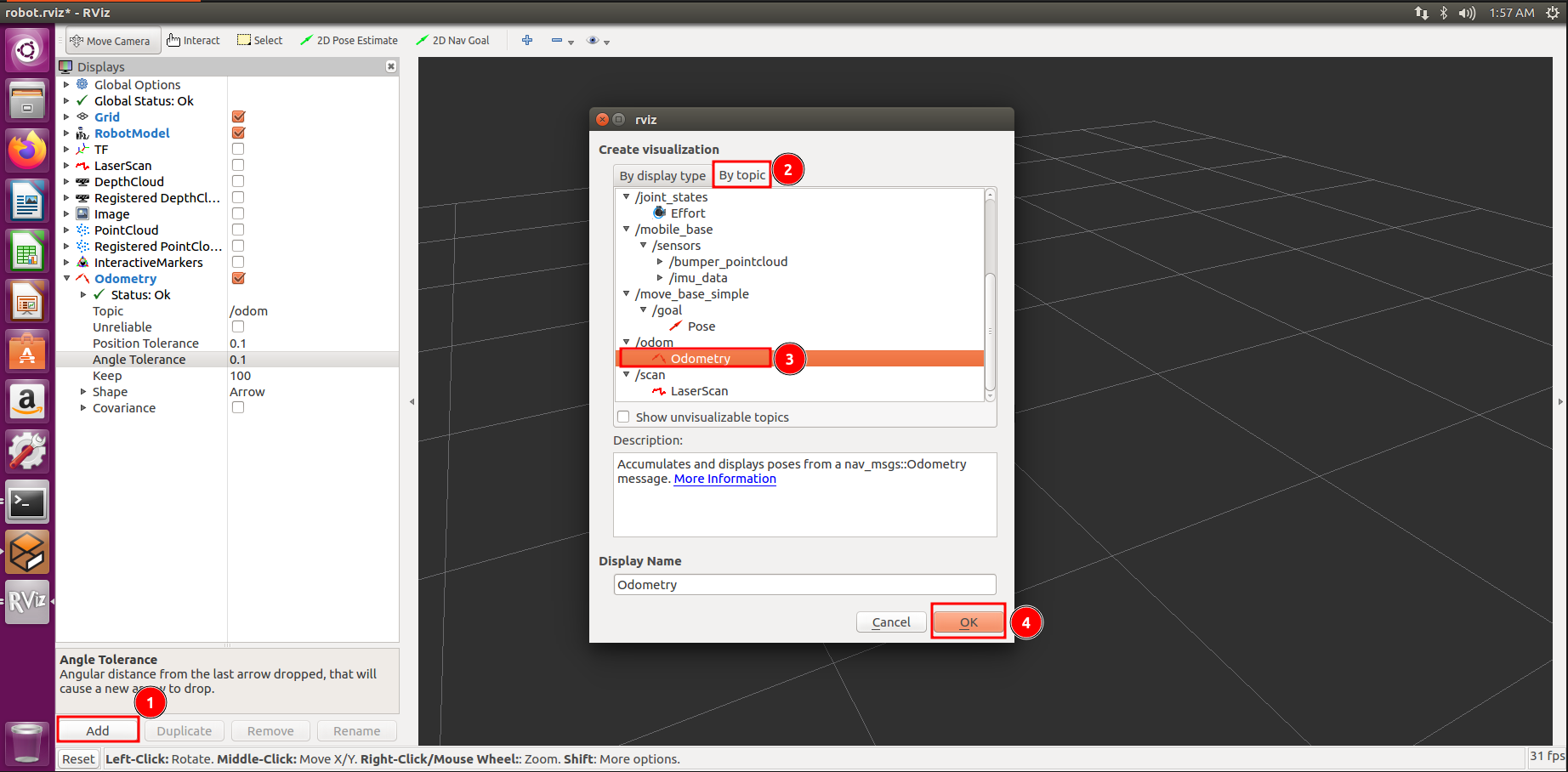
使用以下命令,分别把gazebo和rviz启动起来
$ roslaunch turtlebot_gazebo turtlebot_world.launch
$ roslaunch turtlebot_rviz_launchers view_robot.launch
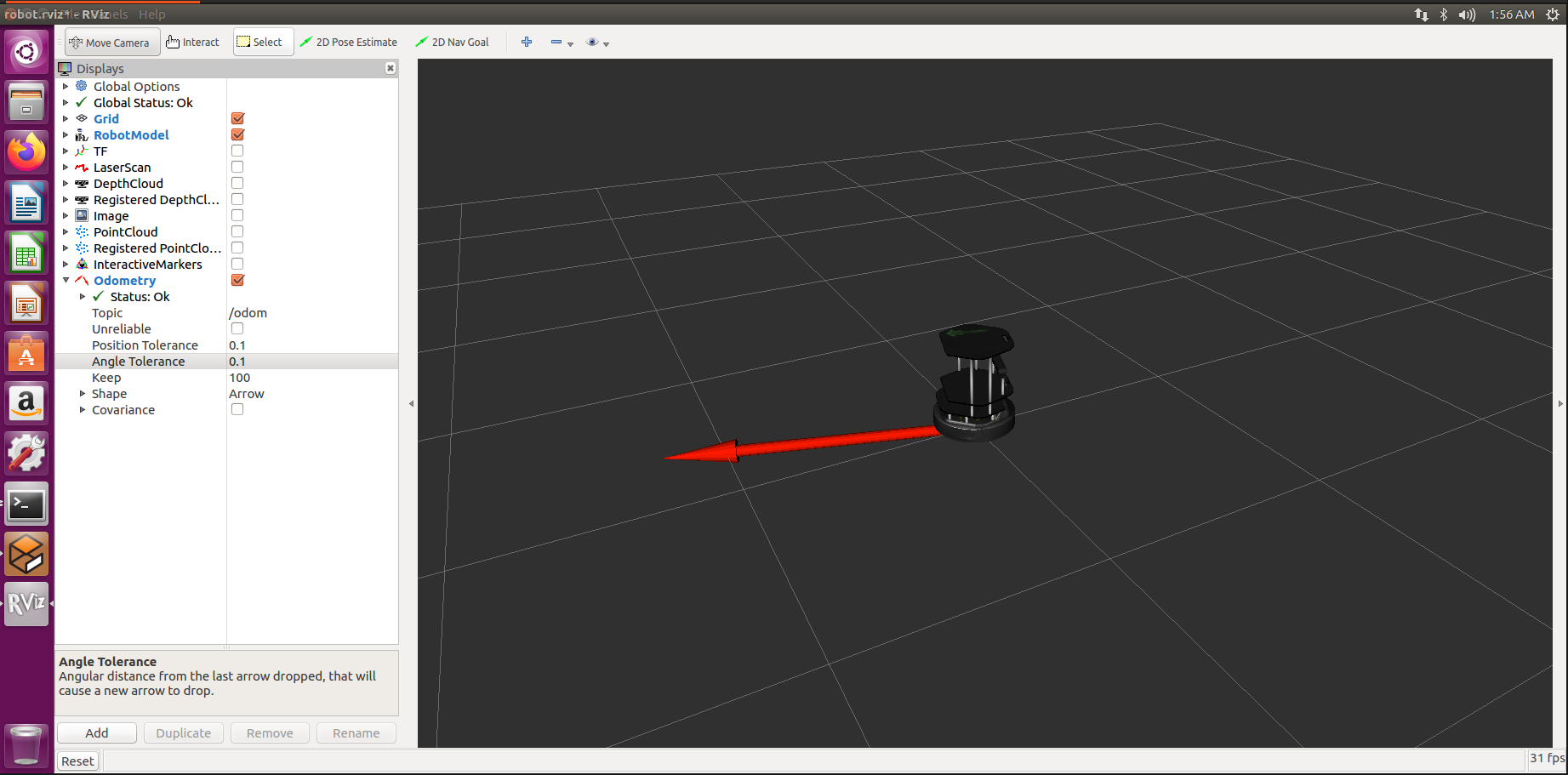
按如下方式勾选
 就会出现一根红色箭头,将指明turtlebot的前进方向
就会出现一根红色箭头,将指明turtlebot的前进方向
 然后发布运动命令
然后发布运动命令
$ rostopic pub -r 10 /cmd_vel_mux/input/teleop \geometry_msgs/Twist '{linear: {x: 0.1, y: 0, z: 0}, angular: {x: 0, y: 0, z: -0.5}}'
# 效果与上面的一样,
$ rostopic pub -r 10 /mobile_base/commands/velocity \geometry_msgs/Twist '{linear: {x: 0.1, y: 0, z: 0}, angular: {x: 0, y: 0, z: -0.5}}'
TurtleBot3 仿真
安装环境
$ sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation
然后将给turtlebot3远程计算机开发的ROS catkin 软件包代码拉到本地,并进行编译
$ cd ~/catkin_ws/src/
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ cd ~/catkin_ws
$ catkin_make
用以下命令,去指定model,这样再启动rviz环境下看到的就是burger这个机器人,TurtleBot 3 Burger [US]
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_fake turtlebot3_fake.launch
然后在新的Terminal,就可以用键盘控制这个机器人了
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch

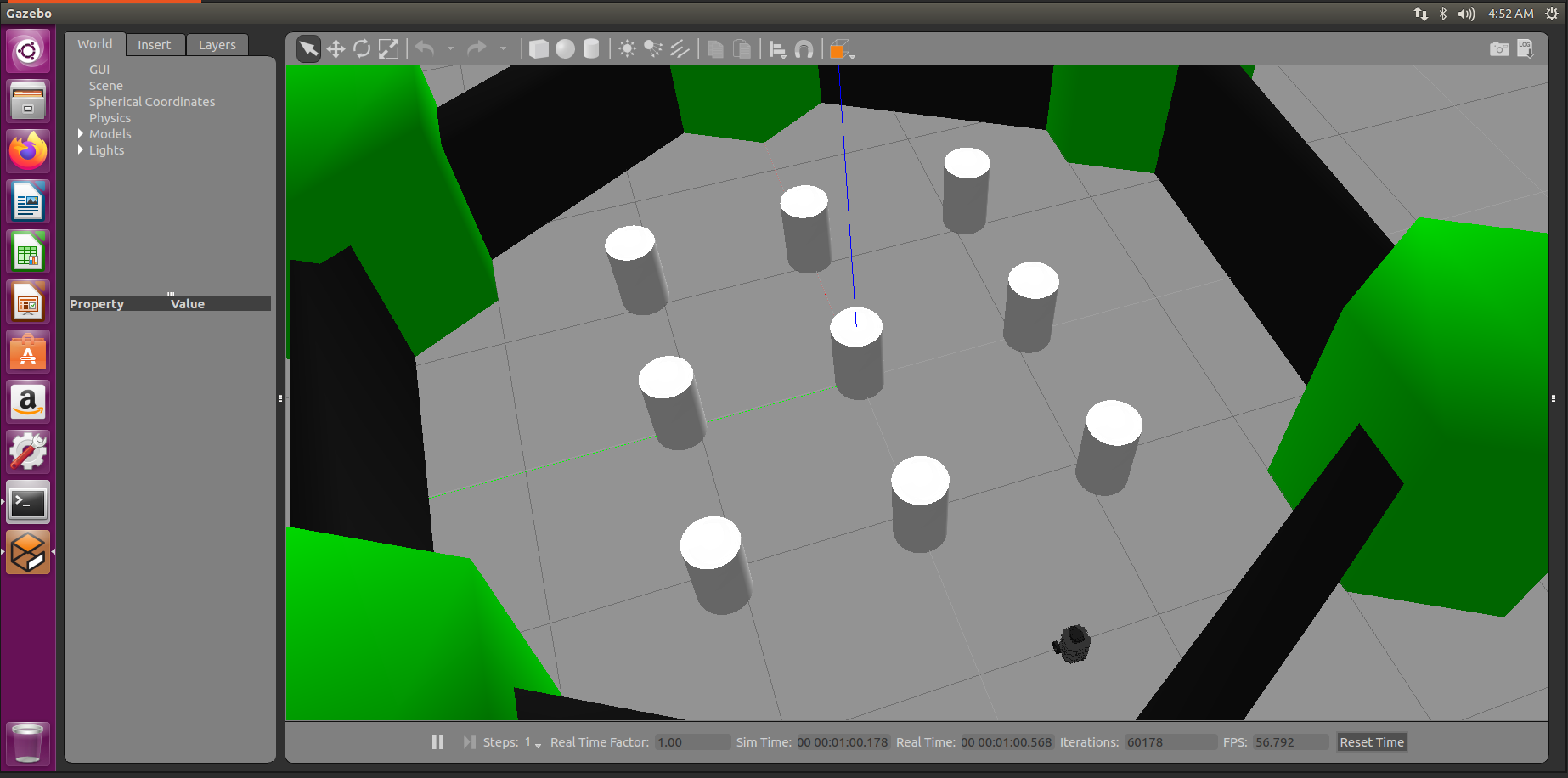
关闭刚刚打开rviz的终端,然后是gazebo环境的仿真,你应该会看到如下画面
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
 然后再打开一个Terminal,执行下面的命令,你就能操控turtlebot3在这个仿真环境里行驶了
然后再打开一个Terminal,执行下面的命令,你就能操控turtlebot3在这个仿真环境里行驶了
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch

并且turtlebot3还可以自动行驶,关掉执行turtlebot3_teleop的终端,在新的Terminal里执行下面的命令
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_gazebo turtlebot3_simulation.launch

来看下为什么turtlebot3不撞墙,新建一个Terminal并执行
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch
发现有激光雷达的扫描数据,红点连起来就是激光雷达的描边
 书本的第三章后半部分就在写硬件部分的实操了,第三章就到这里
书本的第三章后半部分就在写硬件部分的实操了,第三章就到这里
相关文章:
机器人入门(五)—— 仿真环境中操作TurtleBot
仿真环境中操作TurtleBot 一、实操1.1 查看姿态信息1.2 控制turtlebot移动的三种方式1.2.1 命令行发布指令1.2.2 键盘操控1.2.3 Python脚本控制1.2.4 使用rqt工具界面,发布运动指令 二、里程计(odometry)TurtleBot3 仿真 进行实操之前,先准备环境 $ sud…...
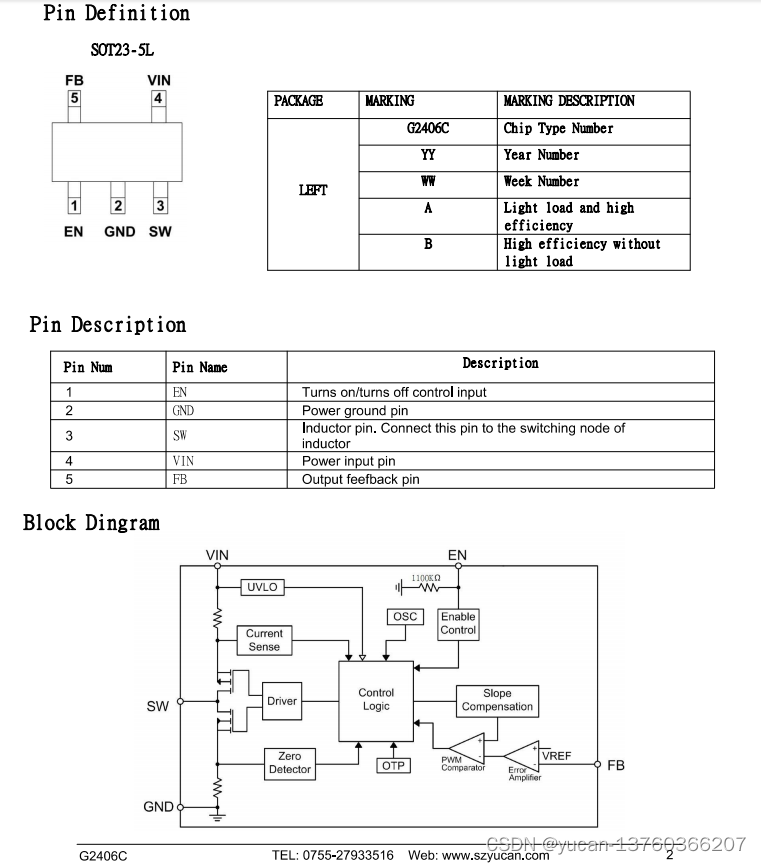
G2406C是一款高效的直流-直流降压开关稳压器,能够提供高达1A输出电流。
G2406C 1.5MHz,1A高效降压DC-DC转换器 概述: G2406C是一款高效的直流-直流降压开关稳压器,能够提供高达1A输出电流。G2406C在2.7V至5.5V的宽范围输入电压下工作,使IC是低压电源转换的理想选择。在1.5MHz的固定频率下运行允许使用具有小电感…...

HTB——常见端口及协议总结
文章目录 一、 常见端口二、HTTP协议三、FTP四、SMB 一、 常见端口 http协议:80、8000https协议:443、8443ftp协议:20(数据传输)、21(发送命令)smb协议:445 二、HTTP协议 https的…...

Spring Boot中处理简单的事务
说到事务,我们第一影响应该是数据库管理系统的一个重要概念。 事务(Transaction)是数据库管理系统(DBMS)中的一个概念,用于管理对数据库的一组操作,这些操作要么全部成功执行,要么全…...

source activate my_env 和conda activate my_env 有什么区别
source activate my_env 和conda activate my_env 有什么区别 source activate 和 conda activate 是两个不同的命令,用于在Conda环境中激活特定的虚拟环境。它们的区别在于它们分别适用于不同版本的Conda。 source activate: source activate 是在Con…...

机器学习模型超参数优化最常用的5个工具包!
优化超参数始终是确保模型性能最佳的关键任务。通常,网格搜索、随机搜索和贝叶斯优化等技术是主要使用的方法。 今天分享几个常用于模型超参数优化的 Python 工具包,如下所示: scikit-learn:使用在指定参数值上进行的网格搜索或…...

出口美国操作要点汇总│走美国海运拼箱的注意事项│箱讯科技
01服务标准 美国的货物需要细致的服务,货物到港后的服务也是非常重要的。如果在货物到港15天内,如果没有报关行进行(PROCEED),货物就会进入了G.O.仓库,G.O.仓库的收费标准是非常高的。 02代理资格审核 美国航线除了各家船公司&a…...
Gateway网关
Gateway网关 1、网关的位置与作用 官网:Spring Cloud Gateway Geteway是Zuul的替代, Zuul:路由和过滤Zuul最终还是会注册到Eureka Zuul网关采用同步阻塞模式不符合要求。 Spring Cloud Gateway基于Webflux,比较完美地支持异步…...

Python Opencv实践 - 车牌定位(纯练手,存在失败场景,可以继续优化)
使用传统的计算机视觉方法定位图像中的车牌,参考了部分网上的文章,实际定位效果对于我目前使用的网上的图片来说还可以。实测发现对于车身本身是蓝色、或是车牌本身上方有明显边缘的情况这类图片定位效果较差。纯练手项目,仅供参考。代码中im…...

U盘插在电脑上显示要格式化磁盘怎么办
U盘是一种便携式存储设备,广泛应用于各种场合。然而,有时候我们可能会遇到一些问题,比如将U盘插入电脑后显示要格式化磁盘,这通常意味着U盘的分区出现了问题或者U盘的文件系统已经损坏。这种情况下,我们应该如何解决呢…...
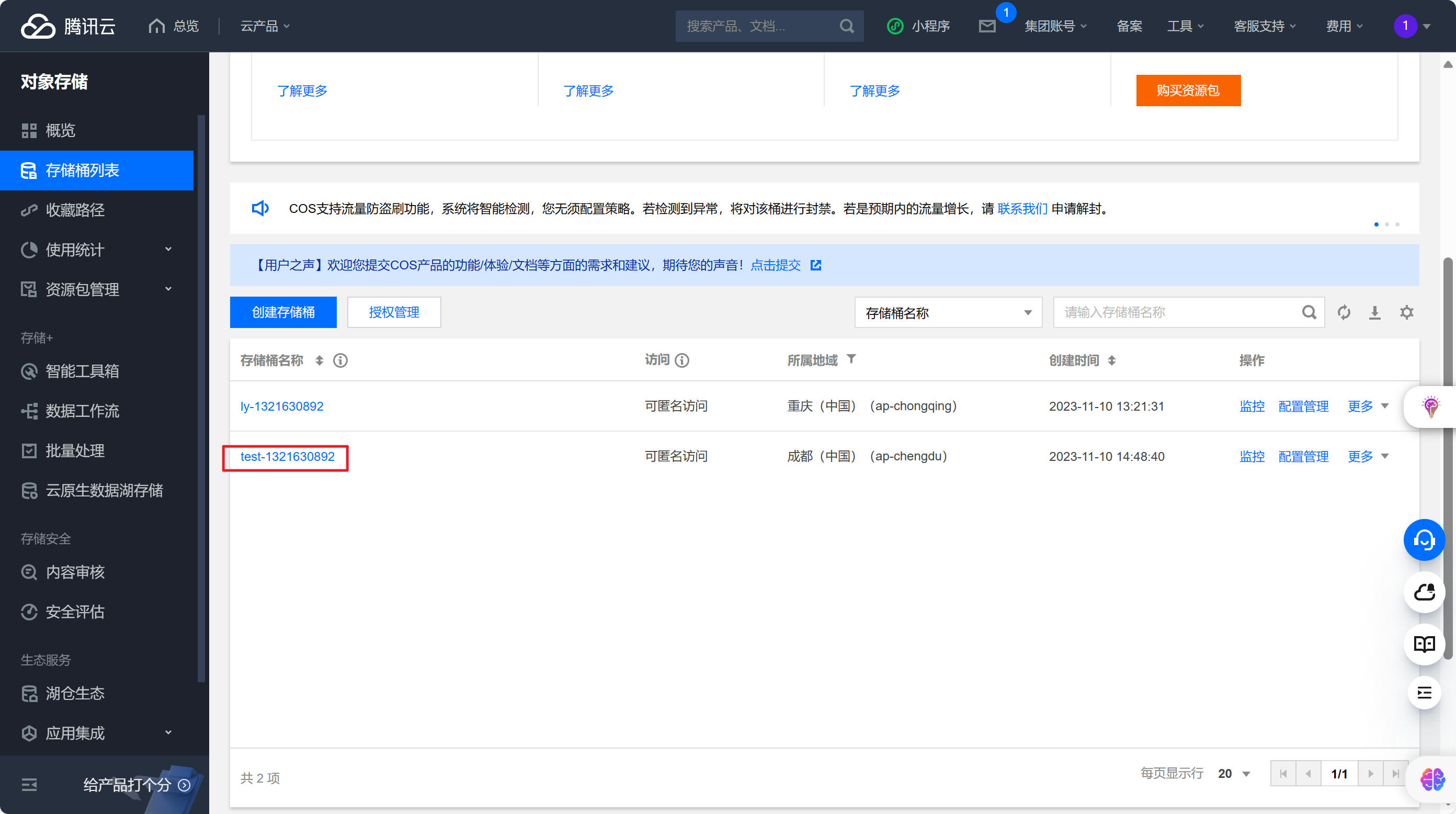
Python使用腾讯云SDK实现对象存储(上传文件、创建桶)
文章目录 1. 开通服务2. 创建存储桶3. 手动上传文件并查看4. python上传文件4.1 找到sdk文档4.2 初始化代码4.3 region获取4.4 secret_id和secret_key获取4.5 上传对象代码4.6 python实现上传文件 5 python创建桶 首先来到腾讯云官网 https://cloud.tencent.com/1. 开通服务 来…...

Springboot整合Jedis实现单机版或哨兵版可切换配置
Springboot整合Jedis实现单机版或哨兵版可切换配置 前言实现最后 前言 前文写到借助redis实现Shiro实现session限制登录数量踢人下线,本文就写一下Jedis的配置,可切换单机版和集群哨兵版,方便开发测试。 实现 很简单,直接上代码&…...

lenovo联想小新 Air-14 2019 AMD平台API版(81NJ)原装出厂Windows10系统
下载链接:https://pan.baidu.com/s/1HCC66EH4UOcgofRx5_v1oA?pwdlgqw 提取码:lgqw 原厂系统自带所有驱动、出厂主题壁纸、系统属性专属LOGO标志、Office办公软件、联想电脑管家等预装程序 所需要工具:16G或以上的U盘 文件格式…...
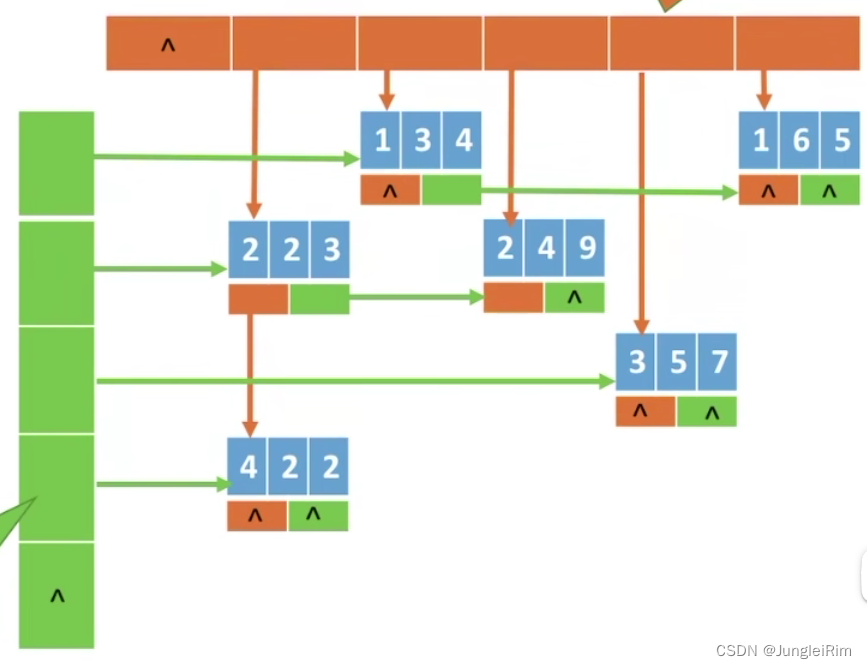
特殊矩阵的压缩存储(对称矩阵,三角矩阵,三对角矩阵,稀疏矩阵)
目录 1.数组的存储结构1.—维数组2.二维数组1.行优先存储2.列优先存储 2.特殊矩阵1.对称矩阵1.行优先存储 2.三角矩阵1.上三角矩阵2.下三角矩阵 3.三对角矩阵(带状矩阵)4.稀疏矩阵 1.数组的存储结构 1.—维数组 各数组元素大小相同,且物理上…...

DDU框架学习之路
目录 MVVM对比 DDU 数据消费者UI 数据的转换者:Domain Layer 数据图生产者/提供者 DataLayer 遵循原理: 单一数据流: Android官方推荐架构:DDU MVVM对比 M:Model 网络层 用于获取远端数据 VM:ViewModel 中间转…...
进阶课6——基于Seq2Seq的开放域生成型聊天机器人的设计和开发流程
情感聊天机器人通常属于开放领域,用户可以与机器人进行各种话题的互动。例如,微软小冰和早期的AnswerBus就是这种类型的聊天机器人。基于检索的开放领域聊天机器人需要大量的语料数据,其开发流程与基于任务型的聊天机器人相似,而基…...

Java面试题04
1.Array 和 ArrayList 有何区别? Array是固定长度的,元素类型可以是基本类型,创建后大小不可改变;ArrayList是可变长 度的,只能存储对象,可以动态添加和删除元素。 区别1: 存储类型不同 …...

海康Visionmaster-通讯管理:使用 Modbus TCP 通讯 协议与流程交互
使用 Modbus TCP 通讯协议与视觉通讯,当地址为 0000 的保持型寄存器(4x 寄存器)变为 1 时,触发视觉流程执行一次,同时视觉将地址为 0000 的寄存器复位(也即写为 0),视觉流程执行完成后,将结果数…...

assimp中如何判断矩阵是否是单位矩阵
对于一个矩阵元素为浮点型的矩阵,你是否还在使每个元素跟1.0f或0.0f进行比较,如果这样,只能说你的结果不一定正确,那我们看看assimp中是如何做的。 template <typename TReal> AI_FORCE_INLINE bool aiMatrix4x4t<TReal…...

大数据Doris(二十):数据导入(Broker Load)介绍
文章目录 数据导入(Broker Load)介绍 一、适用场景...

CMU Subword Modeling | 15 Orthography versus IPA: Why We Need Both
本文解读 CMU “Subword Modeling” (Spring 2026) 第15讲:Orthography versus IPA: Why We Need Both。 这节课回答一个 NLP 从业者常见的疑问:「普通字母表不就能表示声音了吗?为什么还需要 IPA?」答案是文字到语音的映射在三个…...

双目测距精度到底怎么样?我用Python实测了不同距离和基线的效果
双目测距精度实测:Python环境下不同参数组合的性能对比与优化策略 在计算机视觉领域,双目测距技术因其硬件成本低、实现方案成熟而广受欢迎。但实际应用中,工程师们常面临一个核心问题:这套系统的测量精度究竟如何?本文…...
 预认证 RCE 漏洞链详解)
Sitecore Experience Platform (XP) 预认证 RCE 漏洞链详解
Sitecore 是一个广受欢迎的企业级内容管理系统(CMS),帮助全球企业创建和管理网站及数字媒体内容。近期,安全研究机构 WatchTowr 披露了一条无需任何身份验证即可实现远程代码执行(RCE)的完整漏洞利用链&…...

mysql升级后日志文件如何处理_mysql日志迁移说明
MySQL升级后日志路径和配置必须显式重设:error log和slow-query-log-file需确保目录存在并授权;log-bin迁移要复制旧文件并避免直接删除;GTID模式下purge需谨慎;废弃参数如log_warnings须替换为log_error_verbosity;升…...

程序员的心理学学习笔记 - 逆火效应
逆火效应 1、基本介绍 逆火效应指的是当人们遇到与自己坚定信念相矛盾的证据时,不但不会改变想法,反而会更加坚信自己原来的观点,有如下原因威胁感:挑战某个信念等于挑战自我认同,大脑会启动防御认知失调:矛…...

Scroll Reverser:解决Mac滚动方向混乱的终极指南
Scroll Reverser:解决Mac滚动方向混乱的终极指南 【免费下载链接】Scroll-Reverser Per-device scrolling prefs on macOS. 项目地址: https://gitcode.com/gh_mirrors/sc/Scroll-Reverser 你是否经常在Mac触控板和鼠标之间切换时,被完全相反的滚…...

从零搭建RGBD视觉开发环境:Python+OpenNI2驱动奥比中光深度相机实战
1. 环境准备:驱动与OpenNI2安装 刚拿到奥比中光RGBD相机时,我就像拿到新玩具的孩子一样兴奋。但很快发现,要让这个"玩具"真正动起来,得先搞定驱动和开发环境。这里分享我踩过坑之后总结的可靠安装方法。 首先需要下载官…...

实时可视化组件设计
实时可视化组件设计:数据驱动的交互艺术 在当今数据爆炸的时代,实时可视化组件已成为企业决策、用户体验和系统监控的核心工具。无论是金融交易大盘、智能工厂的流水线监控,还是社交媒体的实时热点分析,动态可视化的高效呈现直接…...
)
飞书事件订阅避坑指南:从URL验证失败到解密报错,我踩过的那些坑(Java版)
飞书事件订阅实战避坑手册:Java开发者的深度排错指南 第一次集成飞书事件订阅功能时,我天真地以为按照官方文档一步步操作就能顺利完成。直到URL验证请求连续失败七次、解密代码突然抛出BadPaddingException、事件推送神秘消失时,我才意识到…...
)
告别Keil依赖:STM32 ST-LINK Utility独立烧录与量产实战指南(图文详解)
1. 为什么需要独立于Keil的烧录工具? 很多STM32开发者习惯在Keil或IAR这样的集成开发环境中直接烧录程序,这确实很方便。但当你需要批量烧录几十、几百甚至上千块芯片时,这种方式的效率就显得捉襟见肘了。我曾经在一个量产项目中,…...