【左程云算法全讲6】链表相关
系列综述:
💞目的:本系列是个人整理为了秋招面试的,整理期间苛求每个知识点,平衡理解简易度与深入程度。
🥰来源:材料主要源于左程云算法课程进行的,每个知识点的修正和深入主要参考各平台大佬的文章,其中也可能含有少量的个人实验自证。
🤭结语:如果有帮到你的地方,就点个赞和关注一下呗,谢谢🎈🎄🌷!!!
🌈【C++】秋招&实习面经汇总篇
文章目录
- 链表问题
- 基本问题
- 参考博客
😊点此到文末惊喜↩︎
链表问题
基本问题
- 笔试和面试
- 对于笔试,一般不需要在意空间复杂度
- 对于面试,时间复杂度作为第一位,但是一定要尽量节省空间
- 题目
- 输入链表头节点,奇数长度返回中点,偶数长度返回上中点
- 输入链表头节点,奇数长度返回中点,偶数长度返回下中点
- 输入链表头节点,奇数长度返回中点的前一个,偶数长度返回上中点的前一个
- 输入链表头节点,奇数长度返回中点的前一个,偶数长度返回下中点的前一个
// 输入链表头节点,奇数长度返回中点,偶数长度返回上中点
Node FindNode(Node head) {// 健壮性检查if (head == nullptr || head->next == nullptr || head->next->next == nullptr)return head;// 初始化Node slow = head->next;Node fast = head->next->next;while (fast->next != nullptr && fast->next->next != nullptr) {slow = slwo->next;fast = fast->next;}return slow;
}// 输入链表头节点,奇数长度返回中点,偶数长度返回下中点
Node FindNode(Node head) {// 健壮性检查if (head == nullptr || head->next == nullptr || head->next->next == nullptr)return head;// 初始化Node slow = head->next;Node fast = head->next; // 初始化位置不同while (fast->next != nullptr && fast->next->next != nullptr) {slow = slwo->next;fast = fast->next;}return slow;
}
- 判断是否为链表是否回文
- 思路1:先使用栈进行存储,然后再从链表头开始与栈中元素进行比较
- 思路2:找到链表中间,然后使用栈存储后半部分,再链表与栈中进行一一比较
- 思路3:原地空间,找到链表中间,将后半部分指针逆序,然后
// 定义三个匿名函数进行处理
auto 找中点
auto 反转链表
auto 比较
- 链表调整:小于放左边,等于放中间,大于放右边
- 笔试使用:放在数组中,然后进行partition
- 桶思想:进行区域划分:小于、等于、大于的每个区域有两个指针
在这里插入代码片
- 克隆带有随机指针的链表
- 思路1:使用
unordered_map<int, Node*>,遍历链表存入哈希表中,再遍历一遍设置随机指针 - 思路2:在每个节点后面克隆并插入,然后设置新插入节点的random指针,分离新节点链表(这个过程和random无关)
- 思路1:使用
Node* copyRandomList(Node* head) {if (head == nullptr) return nullptr;// 复制结点并插入到结点后面Node *cur = head;Node *next = nullptr;while (cur != nullptr) {next = cur->next;cur->next = new Node(cur->val);cur->next->next = next;cur = next;}// 复制所有结点的random关系cur = head;Node *cur_copy = nullptr;while (cur != nullptr) {next = cur->next->next; // 先记录cur_copy = cur->next;cur_copy->random = cur->random != nullptr ? cur->random->next : nullptr;cur = next; // 后迭代}// 分离链表Node *res = head->next;cur = head;while (cur != nullptr) {// 先记录,后使用,注意每次迭代要还原和结尾情况next = cur->next->next;cur_copy = cur->next;cur->next = next;cur_copy->next = next != nullptr ? next->next : nullptr;cur = next;}return res;
}
- 如何两个链表相交返回第一个交点, 如果不相交返回nullptr
- 思路1:使用
unordered_set,一边遍历一边查set表,判断是否成环 - 思路2:遍历两个链表长度,然后相减。再遍历长链表-短链表长度次,最后共同再一起遍历
- 思路1:使用
ListNode *getIntersectionNode(ListNode *headA, ListNode *headB) {if (headA == nullptr || headB == nullptr) return nullptr;ListNode *cur1 = headA;ListNode *cur2 = headB;// 求两个链表长度的差值int n = 0;while (cur1->next != nullptr) {++n;cur1 = cur1->next;} while (cur2->next != nullptr) {--n;cur2 = cur2->next;}// 如果两个链表相交,必然最后一个结点地址相同// 否则两个链表不相交if (cur1 != cur2) return nullptr;cur1 = (n > 0 ? headA : headB);cur2 = (n > 0 ? headB : headA);n = abs(n); // 差值转正// 长链表头先走差值步while (n != 0) {--n;cur1 = cur1->next;}// 两个链表头一起走while (cur1 != cur2) {cur1 = cur1->next;cur2 = cur2->next;}return cur1;
}
- 链表成环问题:如果成环返回环的入口结点
- 遍历成环的单链表,如果
- 思路1:使用
unordered_set,一边遍历一边查set表,判断是否成环 - 思路2:快指针一次走两步,慢指针一次走一步。然后在环内相遇后,然后快指针重新从头开始,快慢指针继续走,再次遇到环的入口
ListNode *detectCycle(ListNode *head) {// 健壮性检查:注意必须都不为空if (head == nullptr || head->next == nullptr || head->next->next == nullptr) return nullptr;// 先进行一次,然后就可以将判断条件设置为fast != slowwListNode *fast = head->next->next;ListNode *slow = head->next;// 快指针走两步,慢指针走一步while (fast != slow) {if (fast->next == nullptr || fast->next->next == nullptr)return nullptr;slow = slow->next;fast = fast->next->next;}// 然后快指针指向头,两个指针同步每次走一步fast = head;while (fast != slow) {slow = slow->next;fast = fast->next;}return slow;
}
- 知道一个单链表中的某个结点地址,删除该结点
- 思路1:遍历链表到该结点的前一个结点,然后进行删除
- 思路2(借尸还魂):使用该节点的后一个结点的值拷贝覆盖该结点,然后删除该节点的后一个结点。
- 拷贝开销:如果结点拷贝开销特别大,如集群则无法进行
- 结尾结点问题:无法删除链表的最后一个结点,但是结尾可以使用一个空结点哨兵,标识结尾
🚩点此跳转到首行↩︎
参考博客
- 对数器
- 单调队列
- 快速链表quicklist
- 《深入理解计算机系统》
- 侯捷C++全系列视频
- 待定引用
- 待定引用
- 待定引用
相关文章:

【左程云算法全讲6】链表相关
系列综述: 💞目的:本系列是个人整理为了秋招面试的,整理期间苛求每个知识点,平衡理解简易度与深入程度。 🥰来源:材料主要源于左程云算法课程进行的,每个知识点的修正和深入主要参考…...

从HDFS到对象存储,抛弃Hadoop,数据湖才能重获新生?
Hadoop与数据湖的关系 1、Hadoop时代的落幕2、Databricks和Snowflake做对了什么3、Hadoop与对象存储(OSD)4、Databricks与Snowflake为什么选择对象存储5、对象存储面临的挑战 1、Hadoop时代的落幕 十几年前,Hadoop是解决大规模数据分析的“白…...

灰度与二值化
人工智能的学习之路非常漫长,不少人因为学习路线不对或者学习内容不够专业而举步难行。不过别担心,我为大家整理了一份600多G的学习资源,基本上涵盖了人工智能学习的所有内容。点击下方链接,0元进群领取学习资源,让你的学习之路更加顺畅!记得…...
No183.精选前端面试题,享受每天的挑战和学习
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云课上架的前后端实战课程《Vue.js 和 Egg.js 开发企业级健康管理项目》、《带你从入…...

[C国演义] 第十八章
第十八章 最长斐波那契子序列的长度最长等差数列等差序列划分II - 子序列 最长斐波那契子序列的长度 力扣链接 子序列 ⇒ dp[i] — — 以 arr[i] 结尾的所有子序列中, 斐波那契子序列的最长长度子序列 ⇒ 状态转移方程 — — 根据最后一个位置的组成来划分 初始化 — — 根…...

发送失败的RocktMQ消息,你遇到过吗?
背景 需要通过flink同时向测试和线上的RocketMQ中写入数据 现象 在程序中分别创建了两个MqProducer,设置了不同的nameServerAddr,分别调用不同的producer向不同环境发消息,返回发送成功,但是在线上MQ中却查不到数据࿰…...
Unity中全局光照GI的总结
文章目录 前言一、在编写Shader时,有一些隐蔽的Bug不会直接报错,我们需要编译一下让它显示出来,方便修改我们选择我们的Shader,点击编译并且展示编译后的Shader后的内容,隐蔽的Bug就会暴露出来了。 二、我们大概回顾一…...

毫米波雷达技术在自动驾驶中的关键作用:安全、精准、无可替代
自动驾驶技术正以前所未有的速度不断演进,而其中的关键之一就是毫米波雷达技术。作为自动驾驶系统中的核心感知器件之一,毫米波雷达在保障车辆安全、实现精准定位和应对复杂环境中发挥着不可替代的作用。本文将深入探讨毫米波雷达技术在自动驾驶中的关键…...

Jetson平台180度鱼眼相机畸变校正调试记录
1.需求说明 由于使用180度GMSL鱼眼相机,畸变很大; 如需算法使用,必须进行畸变校正 2. 硬件说明 相机: 森云 SG2-AR0233-5300-GMSL2-190H 主板: Jetson NX 3. opencv畸变矫正处理 3.1 获取内参系数 现在森云相机可以直接读取内部flash获取内参系数 3.2 畸变处理 …...
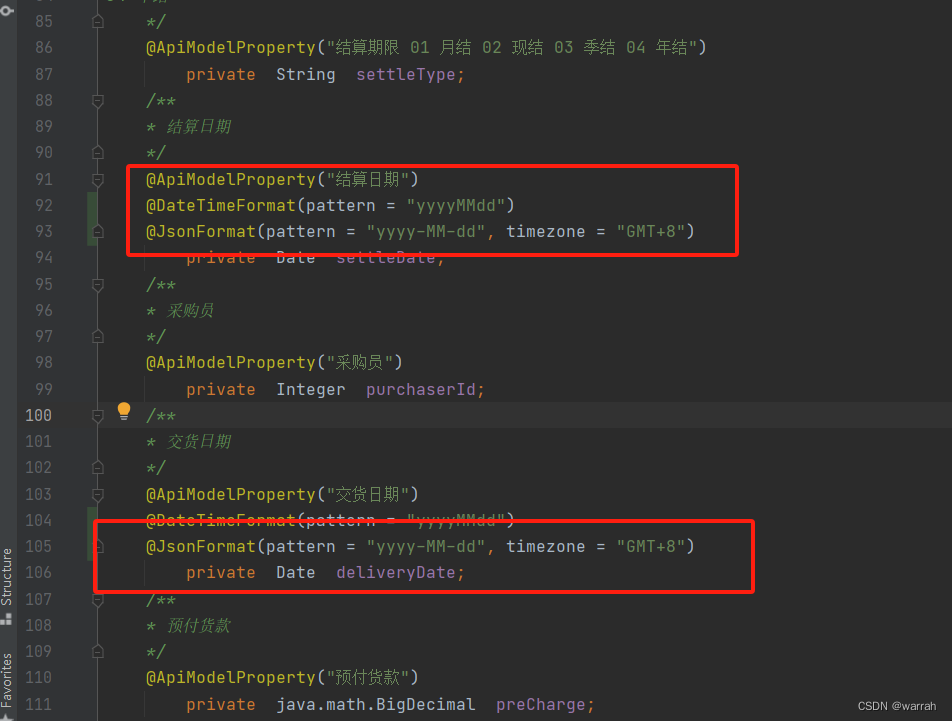
axios请求的问题
本来不想记录,但是实在没有办法,因为总是会出现post请求,后台接收不到数据的情况,还是记录一下如何的解决的比较好。 但是我使用export const addPsiPurOrder data > request.post(/psi/psiPurOrder/add, data); 下面是封装的代码。后台接…...

【pandas刷题系列】Leetcode Problem: [595. 大的国家]
Problem: 595. 大的国家 文章目录 思路解题方法复杂度Code 思路 筛选出对应的数据,然后将不需要的列去除 解题方法 筛选出对应的数据,然后将不需要的列去除 复杂度 时间复杂度: O ( n ) O(n) O(n) 空间复杂度: O ( n ) O(n) O(n) Code import pandas a…...

【打卡】牛客网:BM46 最小的K个数
资料: 1. 排序 sort(name.begin(),name.end()); //升序 sort(name.rbegin(),name.rend()); //降序 【C】vector数组排序_vector排序_比奇堡咻飞兜的博客-CSDN博客 2. 把v2的部分值赋给v1 v1.assign(v2.begin(), v2.end()); // 用新元素替换vector 中的元素。…...

Android各类View触摸监听器失效
在XML布局中出现重叠的View,位置靠后定义的View会覆盖住位置靠前的View;即靠后的View会拦截触碰事件导致靠前的View无法收到触碰事件,无法触发监听器。 //例.<?xml version"1.0" encoding"utf-8"?> <android…...

未整理的知识链接
【scala】下划线用法总结 【scala】下划线用法总结_scala 下划线-CSDN博客 Spark Sql Row 的解析 Spark Sql Row 的解析 - 简书 spark dataframe foreach spark dataframe foreach_mob64ca12f0cf8f的技术博客_51CTO博客 spark- Dataframe基本操作-查询 https://blog.csdn.n…...
【2011年数据结构真题】
41题 41题解答: (1)图 G 的邻接矩阵 A 如下所示: 由题意得,A为上三角矩阵,在上三角矩阵A[6][6]中,第1行至第5行主对角线上方的元素个数分别为5, 4, 3, 2, 1 用 “ 平移” 的思想,…...
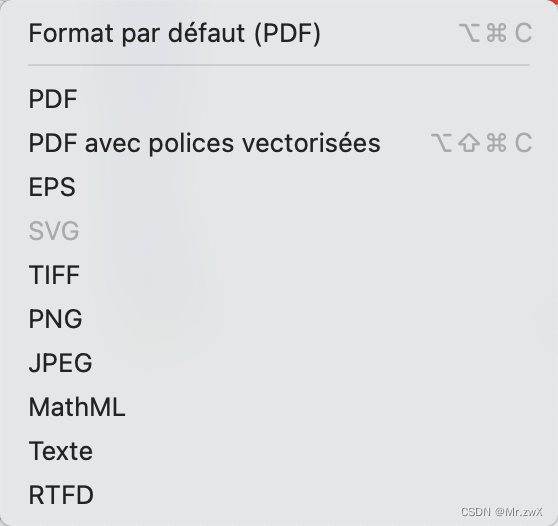
【科研绘图】MacOS上的LaTeX公式插入工具——LaTeXiT
在Mac上经常用OmniGraffle绘图,但是有个致命缺点是没办法插入LaTeX公式,很头疼。之前有尝试用Pages文稿插入公式,但是调字体和颜色很麻烦。并且,PPT中的公式插入感觉也不太好看。 偶然机会了解到了LaTeXiT这个工具,可…...

仓库自动化中的RFID技术的应用浅谈
仓库自动化与RFID技术的结合代表着现代供应链管理的一个重要革新。这两者的协同作用能够显著提升仓储效率、降低成本、增强库存管理、提高货物跟踪的准确性,并且使仓库操作更加智能化。 仓库自动化是一种通过应用自动化技术和系统来管理和优化仓库操作的方法。这种…...
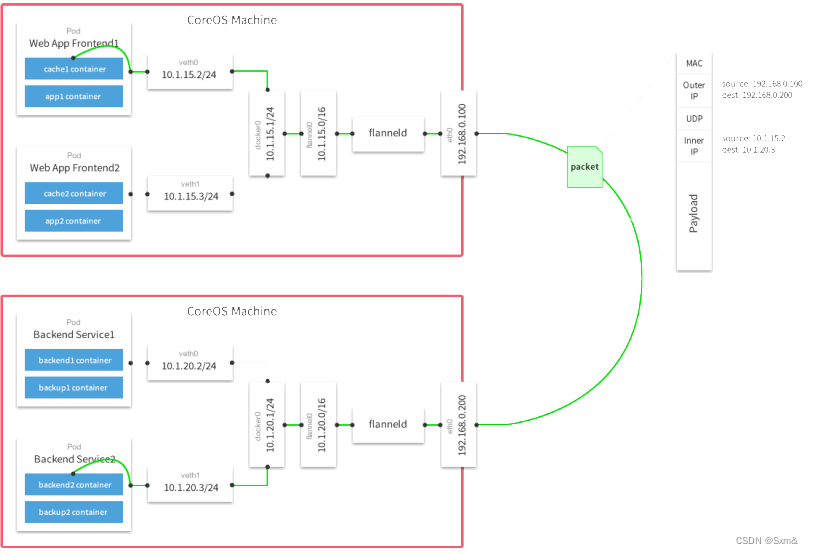
容器网络-Underlay和Overlay
一、主机网络 前面讲了容器内部网络,但是容器最终是要部署在主机上,跨主机间的网络访问又是怎么样的,跨主机网络主要有两种方案。 二、 Underlay 使用现有底层网络,为每一个容器配置可路由的网络IP。也就是说容器网络和主机网络…...
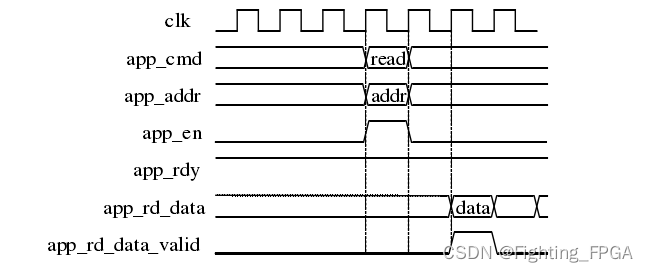
基于FPGA的PCIe-Aurora 8/10音频数据协议转换系统设计阅读笔记
文章可知网下载阅读,该论文设计了一种 PC 到光纤模块(基于Aurora的光纤传输)的数据通路,成功完成了Aurora 以及 DDR 等模块的功能验证。 学习内容: 本次主要学习了Pcie高速串行总线协议、Aurora高速串行总线协议、DDR相…...

stm32控制舵机sg90
一、sg90简介 首先介绍说一下什么是舵机。舵机是一种位置(角度)伺服的驱动器。适用于一些需要角度不断变化的,可以保持的控制系统。sg90就是舵机的一种。 舵机的工作原理比较简单。舵机内部有一个基准电压,单片机产生的PWM信号通…...

Qwen3-4B模型在STM32嵌入式开发中的应用:代码注释生成与调试日志分析
Qwen3-4B模型在STM32嵌入式开发中的应用:代码注释生成与调试日志分析 如果你是一位STM32开发者,下面这个场景你一定不陌生:面对一段几个月前自己写的、涉及复杂定时器配置或CAN总线通信的代码,你皱着眉头看了半天,愣是…...

ARM-驱动-03 Linux 字符设备驱动开发
一、驱动程序基础概念 1. 驱动程序的本质 驱动程序本质上就是操作硬件的程序,和裸机开发中写的 BSP 代码干的是同一件事——直接控制寄存器、管理外设。 区别在于: 裸机开发:驱动和应用代码混在一起写,没有明确的分层,…...
)
2026奇点智能技术大会核心技术解密(AI原生研发全链路SOP首次公开)
第一章:2026奇点智能技术大会:AI原生研发全流程拆解 2026奇点智能技术大会(https://ml-summit.org) 在2026奇点智能技术大会上,AI原生研发不再停留于模型微调与API调用,而是贯穿从需求建模、数据契约定义、可验证推理生成&#x…...

STM32F407驱动4位数码管:从硬件连接到动态扫描编程实战
1. 硬件连接:从零搭建STM32F407与数码管的桥梁 第一次接触数码管驱动时,最让我头疼的就是硬件连线。记得当时拿着杜邦线在开发板和数码管模块之间来回比划,生怕接错线烧坏设备。其实只要理解几个关键点,连接过程会变得非常简单。…...

2026年智能窗帘电机核心揭秘:一颗二极管的原厂选择如何决定体验?
当清晨的第一缕阳光透过窗户,你设定的智能窗帘电机开始平稳、安静地工作,这背后不仅是算法的精准,更是无数微小电子元件的可靠协作。在智能家居设备的核心——电机驱动板上,一颗看似不起眼的二极管,却常常是决定产品成…...

圣女司幼幽-造相Z-Turbo在无障碍服务中的潜力:为视障用户提供角色形象语音化描述生成
圣女司幼幽-造相Z-Turbo在无障碍服务中的潜力:为视障用户提供角色形象语音化描述生成 1. 引言:当AI绘画遇见无障碍服务 想象一下,一位视障朋友正在听一部有声小说,故事里描绘了一位名叫“圣女司幼幽”的角色,她身着墨…...

openclaw模型尝试申请免费试用。
这个免费试用能试用到什么时候,有没有限量限速限时,我统统不知道。但是这是我这只小白,最近一段时间(两周),唯一尝试成功的方案。尝试NVIDIA NIM API https://build.nvidia.com/接受.不知道为啥没好用。而且…...

点云处理入门:手把手教你理解VoxelNet与PointPillars的核心模块
点云处理入门:手把手教你理解VoxelNet与PointPillars的核心模块 自动驾驶和机器人感知领域正在经历一场由3D视觉技术驱动的革命。当激光雷达扫描周围环境时,它会生成成千上万个空间点——这就是我们所说的点云数据。与传统的2D图像不同,点云以…...

AFArray:Arduino嵌入式平台的零堆内存动态数组模板库
1. AFArray:面向嵌入式Arduino平台的模板化动态数组抽象数据类型AFArray 是专为 Arduino 生态设计的轻量级、模板化(Template-based)数组抽象数据类型(ADT),其核心目标是在资源受限的微控制器平台上提供接近…...
✅)
计算机毕业设计:Python天气数据爬虫可视化分析系统 Django框架 线性回归 数据分析 大数据 机器学习 大模型 气象数据(建议收藏)✅
博主介绍:✌全网粉丝50W,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,…...