C++ RBTree 理论
目录
这个性质可以总结为
红黑树的最短最长路径
红黑树的路径范围
code
结构
搞颜色
类
插入
插入逻辑
新插入节点
思考:2. 检测新节点插入后,红黑树的性质是否造到破坏?
解决方法
变色
旋转+变色
第三种情况,如果根节点上面还有节点

这个性质可以总结为
1.每个节点不是红色就是黑色
2.根节点是黑色的
3.不能有两个连续的红色节点 ,即可以出现 红黑 黑黑 不能出现红红
4.每条路径上的黑色机节点数量不一样
至于性质5:每个叶子结点都是黑色的,这里的叶子节点并不是真的叶子节点,而是NIL节点,即空节点。如图(a):
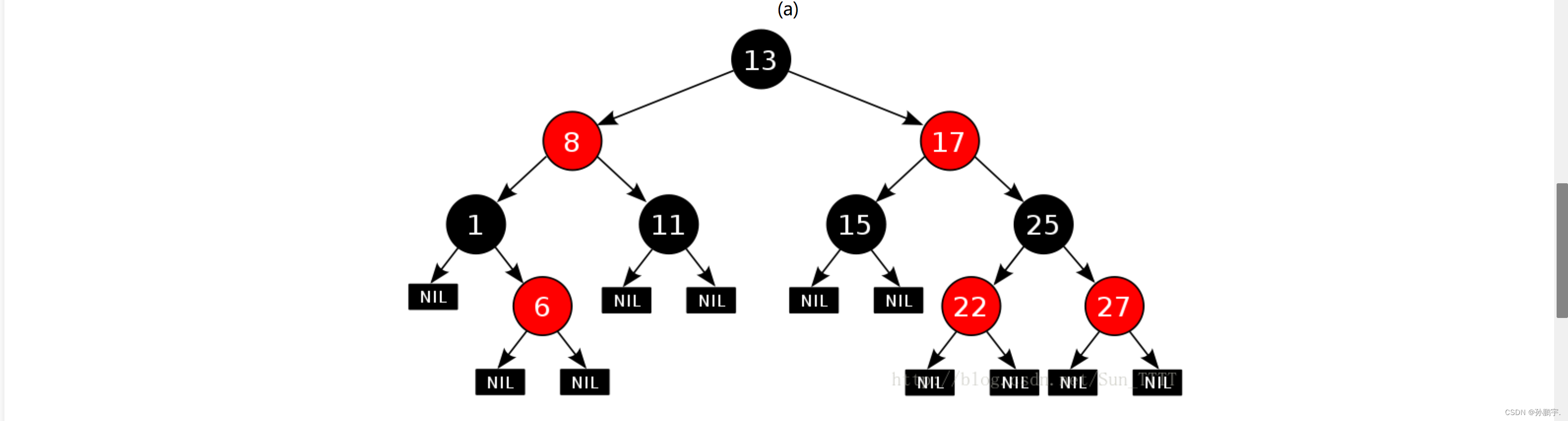
NIL节点有什么作用?如图(a-2),有多少条路径: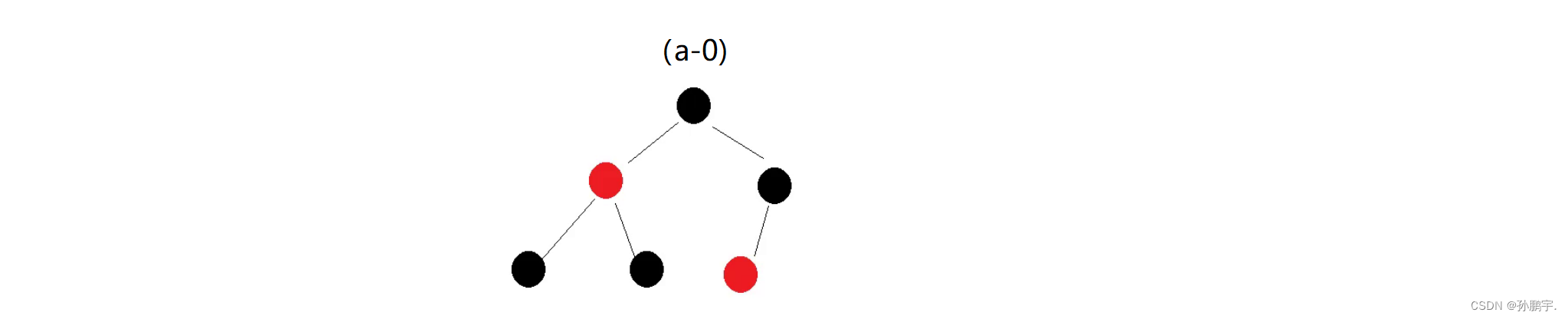
正确答案是有7条。路径路径的判断规则是:从根节点到NULL。
如果我们把NIL节点标记出来就好找路径了:

再比如,图(a-3)是否是红黑树:
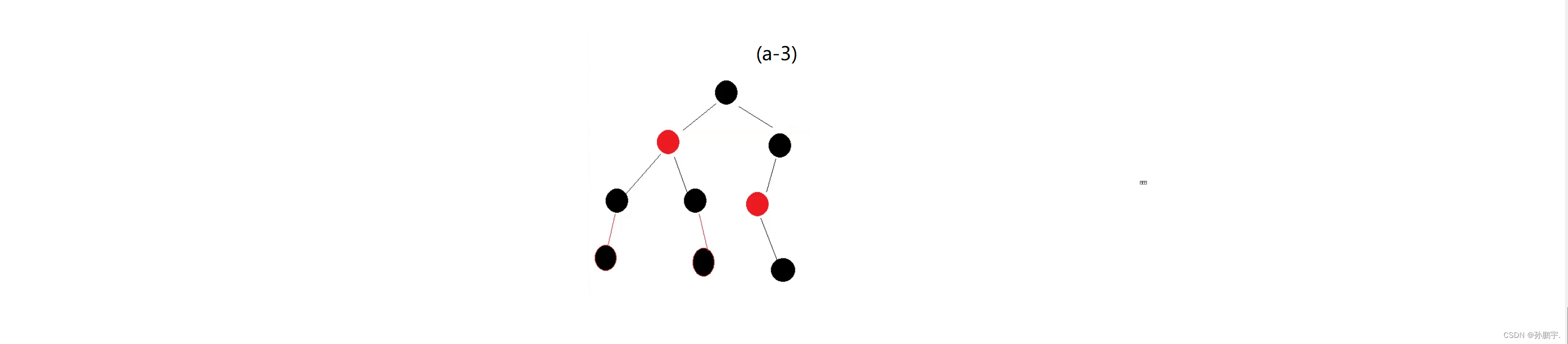
大致一看好像是,但是把NIL节点标出来之后:

路径(b)只有两个黑色节点,不满足红黑树的性质,不是红黑树。
红黑树的最短最长路径
那么红黑树的最短路径是什么样子的,应该是全黑的最短:
那最长的路径呢,应该是一黑一红间隔排列的最长:
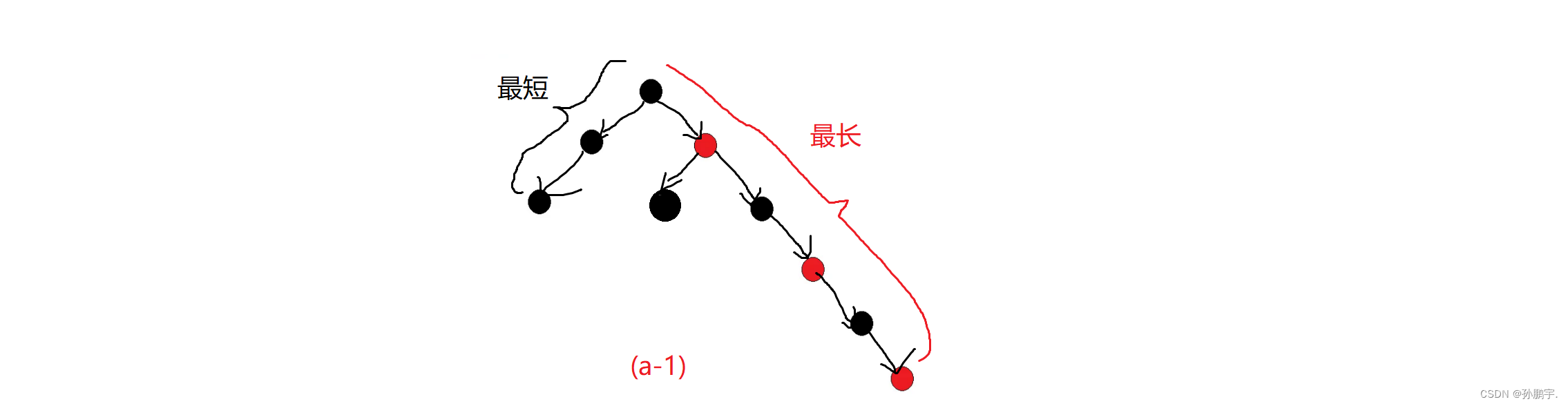 根据图(a-1)我们可以看出,最长的路径是最短的路径的2倍。
根据图(a-1)我们可以看出,最长的路径是最短的路径的2倍。
ps
一个红黑树不一定有最长路径,也不一定有最短路径。
如图(a-2),有最短路径,没有最长路径:
红黑树的路径范围
而知道了最短路径,最长路径,剩下的路径都在最短路径,最长路径范围内,可以写为
[n,2*n]
code
结构
template<class K,class V>struct RBTreeNode
{RBTreeNode<K,V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* parent;pair<K, V>;Color _col;//初始话列表RBTreeNode(const pair<K, V>kv):_left(nullptr),_right(nullptr), _parent(nullptr), pair<K, V>,_col(RED){}
};
搞颜色
enum Color
{RED,BALACK
};类
template<class K,class V>class RBTree{typedef RBTreenode<k,v> Node;public:private:Node* _root = nullptr;};插入
插入逻辑
如果节点为空,就给黑色。如果节点不为空,就插入值。
这个值如果比根节点小,就往左边插入,否则就往右边插入。
bool Insert(const pair<K, v>& kv){if (_root == nullptr){_root = new(kv);_root->_col = BALACK;return true;}//初始化父亲节点和根节点Node* parent = nullptr;Node* cur = _root;while (cur){//key值大,往右走if (cur->kv.first < kv.first){cur = cur->right;}//key值小,往左走else if (cur->kv.first > kv.first){cur = -cur->left;}//否则key值和当前节点相等,不插入else{return false;}}//找到了返回true1return true; }新插入节点
思考:2. 检测新节点插入后,红黑树的性质是否造到破坏?
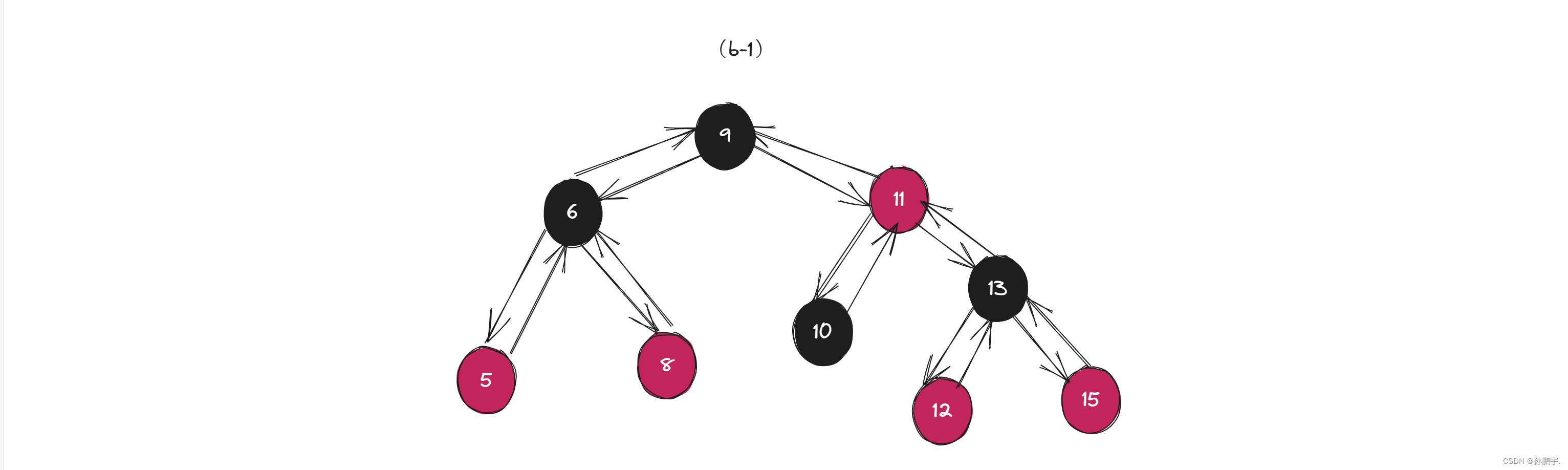
如图(b-1),现在要插入一个节点,那么是插入一个黑色节点还是红色节点呢?
如果插入黑色节点,那么该路径就会多一个黑色节点,根据红黑树特性,其他路径都要补一棵黑色节点,
如果插入红色节点,则只会影响父节点
(即
1.如果父节点也会红节点。两个红节点不能紧挨,需调整
2.如果父亲节点是黑色,则不需调整,直接插入。)。
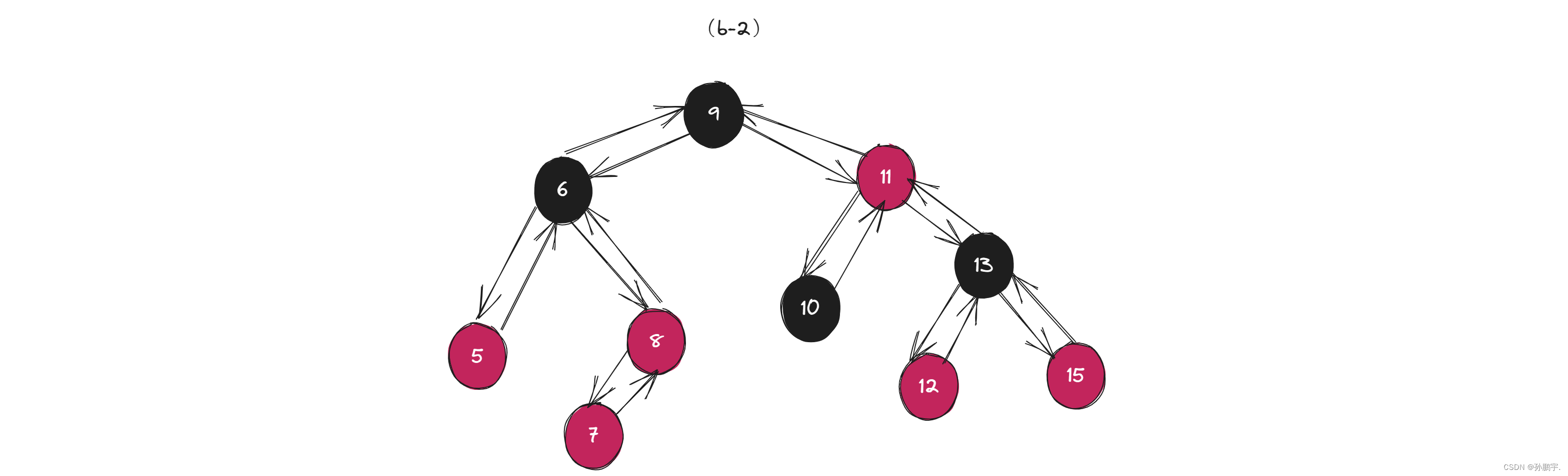
我们看一下怎么调整,如图(b-2),新插入了一个红色节点7:
解决方法
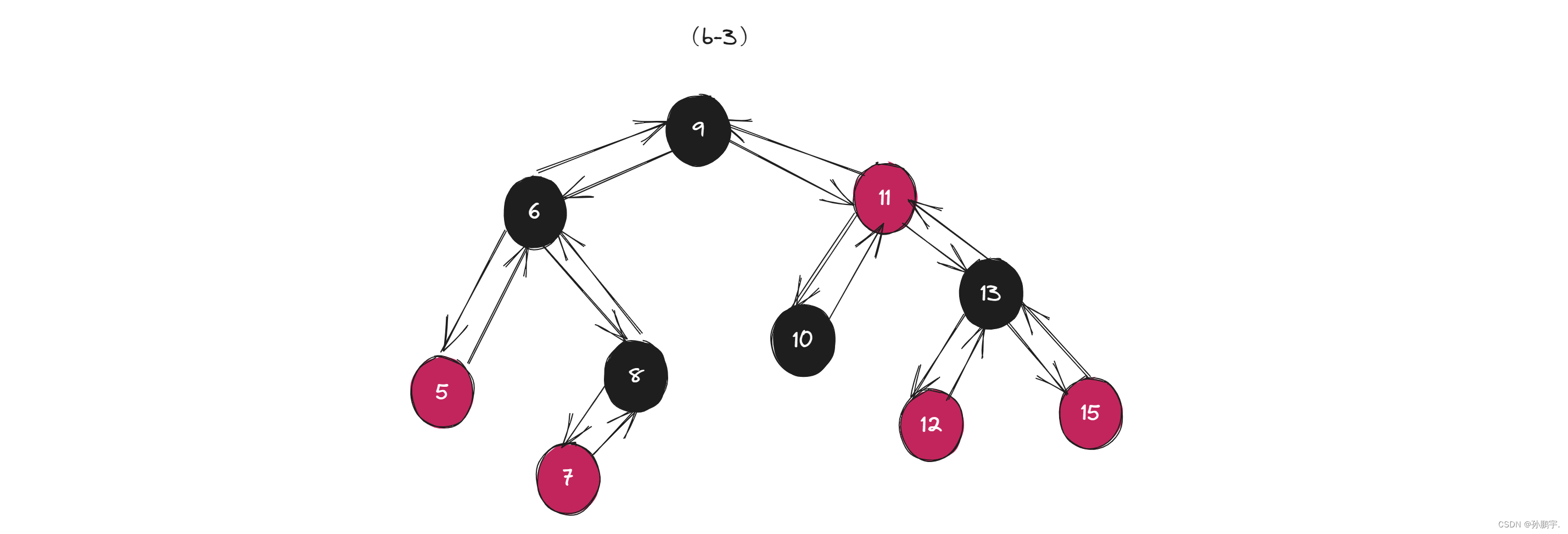
能变色先变色,变色完之后还不行再旋转
变色
如图(b-3),先把父节点8变黑:
这个时候该路径就多了一个黑色节点,再变图(b-4)把6节点变红:
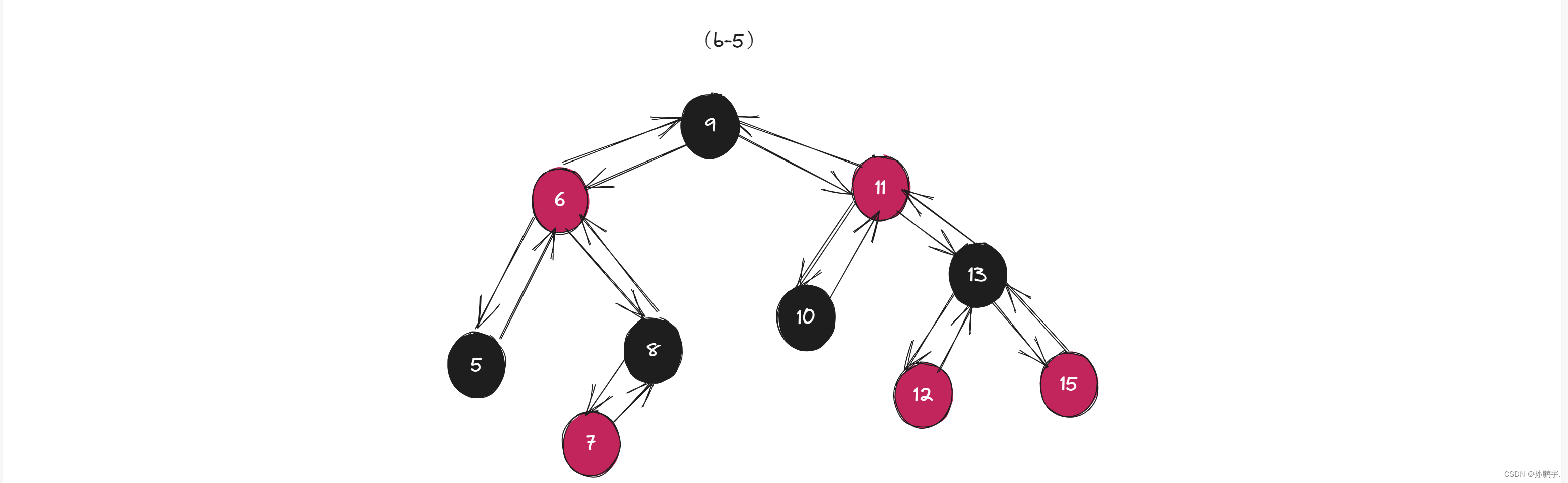
 这个时候该路径又少了个黑色节点,再变图(b-5) 把5节点变黑:
这个时候该路径又少了个黑色节点,再变图(b-5) 把5节点变黑:
旋转+变色
第二种情况,例如图(b-6):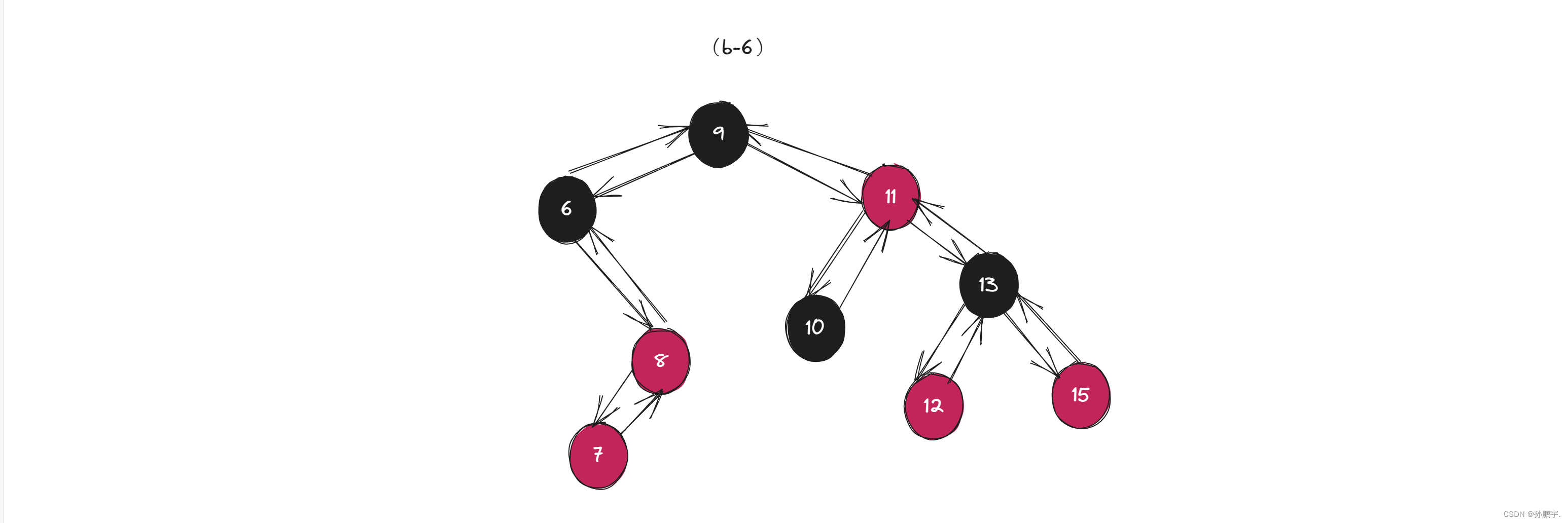 如果还是把父节点变为黑色,把6节点变为红色,那么其他路径就会多一个黑色节点。
如果还是把父节点变为黑色,把6节点变为红色,那么其他路径就会多一个黑色节点。
而该路径又没有其他节点可以再变黑色来平衡这种状态,所以靠变色解决不了这个问题。
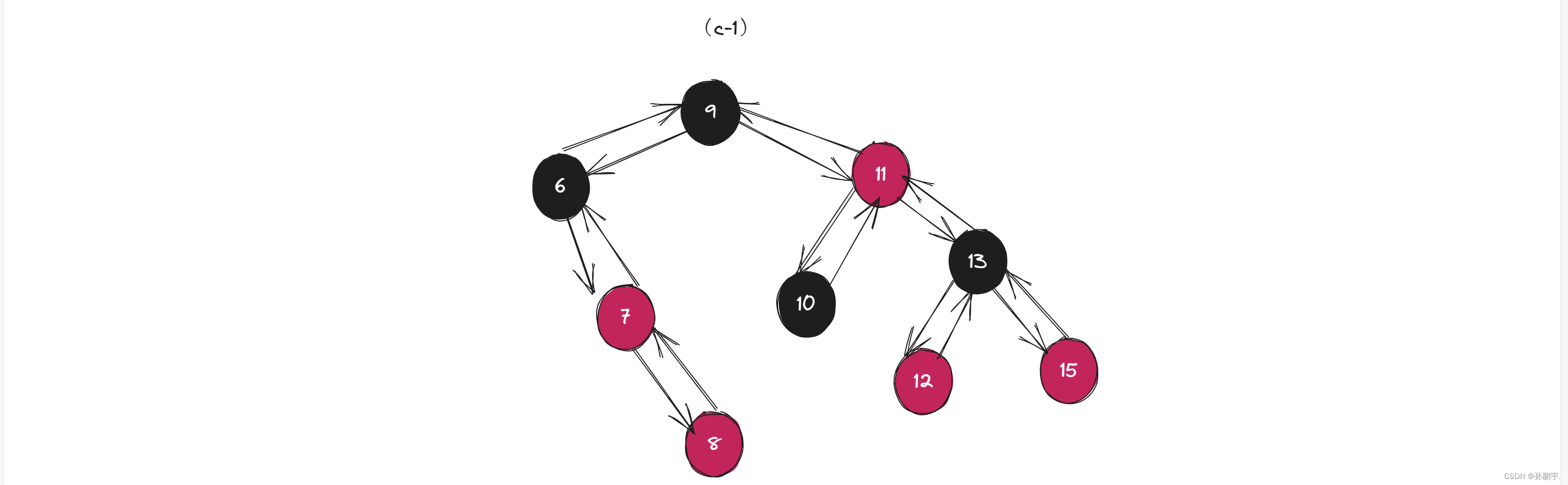
这个时候就要旋转了。
先右旋为图(c-1):
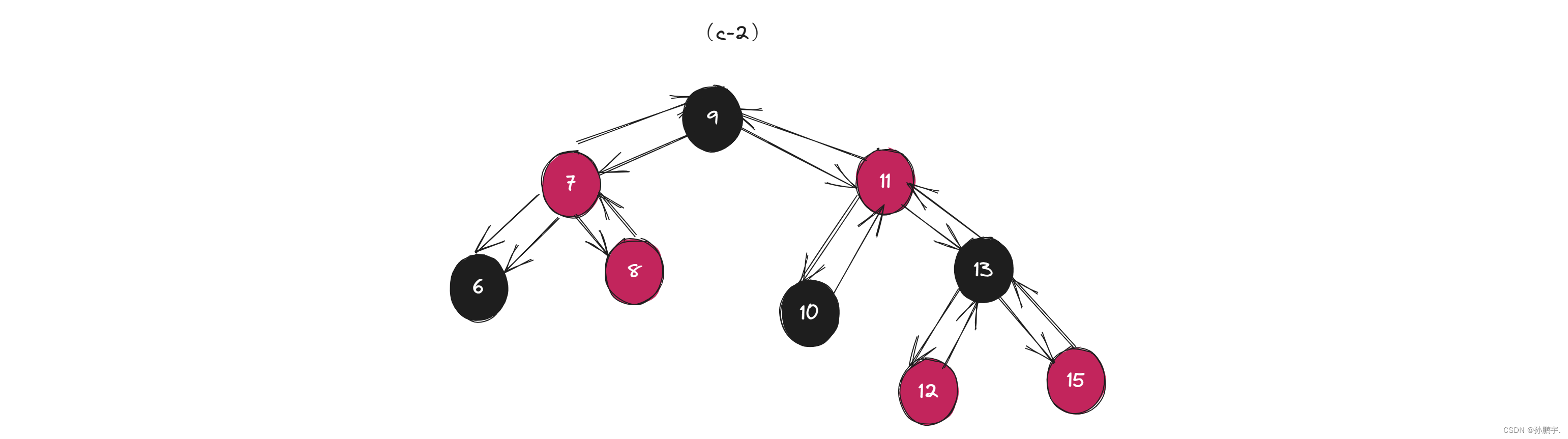
 再左旋为图(c-2):
再左旋为图(c-2):
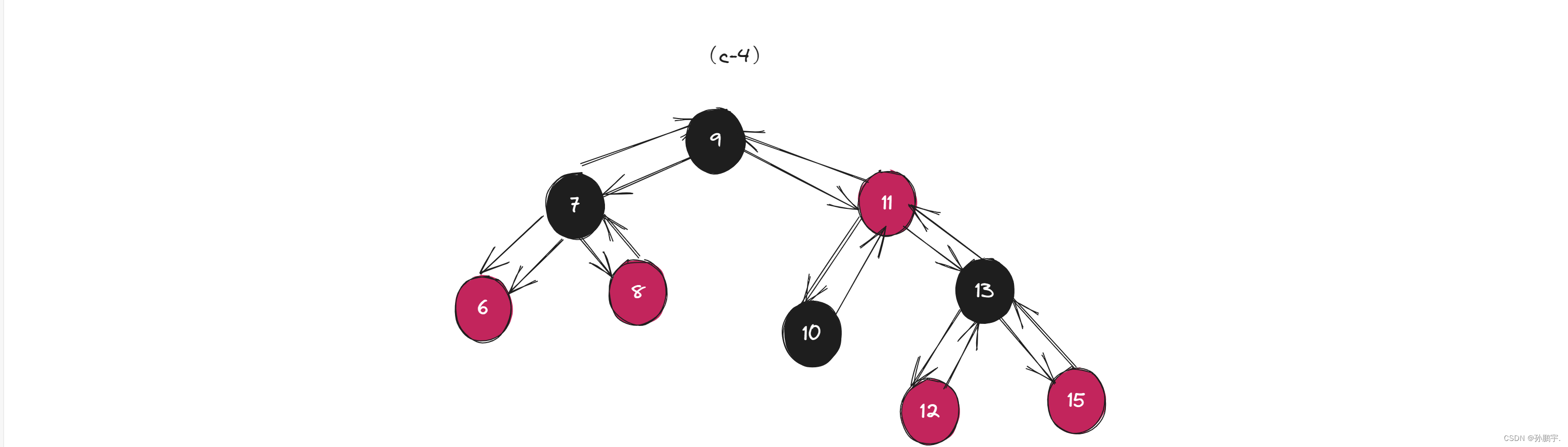
 然后再变色为图(c-4):
然后再变色为图(c-4):
情况一: cur为红,p为红,g为黑,u存在且为红
解决:叔叔存在, 变色

如图(d-0),新插入了一个节点cur:
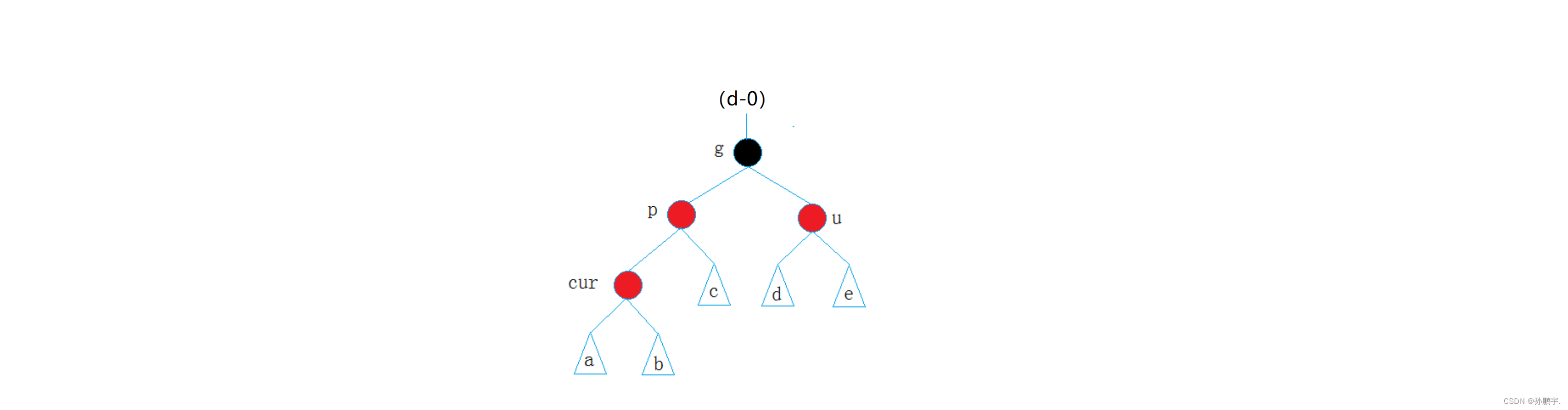
cur为红色节点,那就需要调整。
把p节点变为黑色节点,那么u节点也要变为黑色节点,那么此时就要把g节点变为红色节点。也就是图(d-1):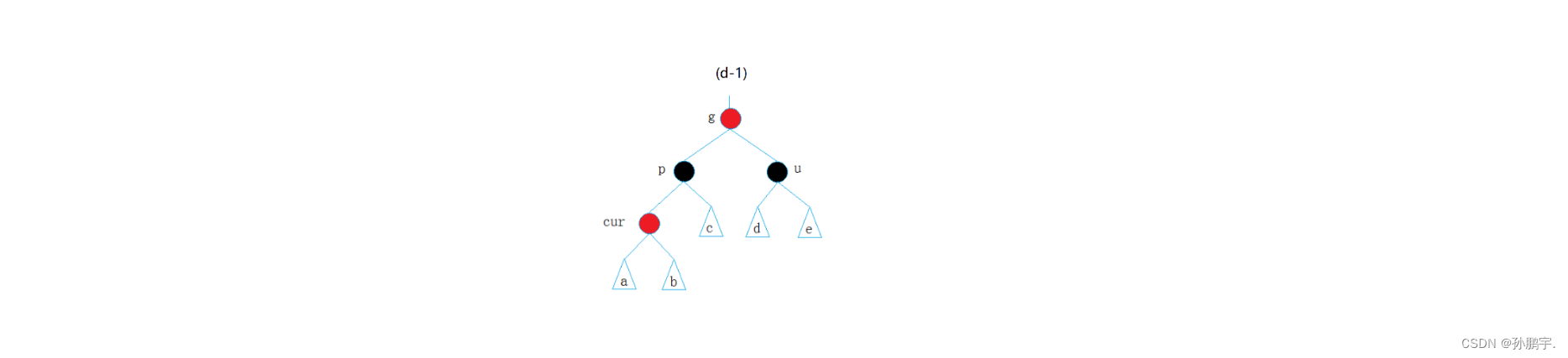
为什么要把g节点变为红色节点呢?
假设g节点不变为红色也就是图(d-3):
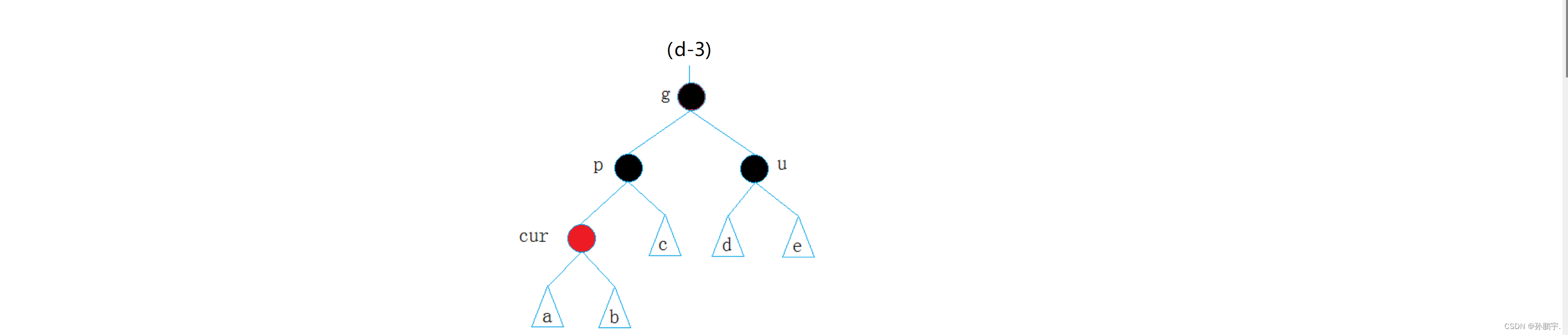
由图(d-1)变为图(d-3)我们发现每条路径凭空多了1个黑色节点。
g节点上面还有节点,那么多了个黑色节点,就会影响上面的路径,所以需要把g节点变红来平衡一下。
如图(d-1):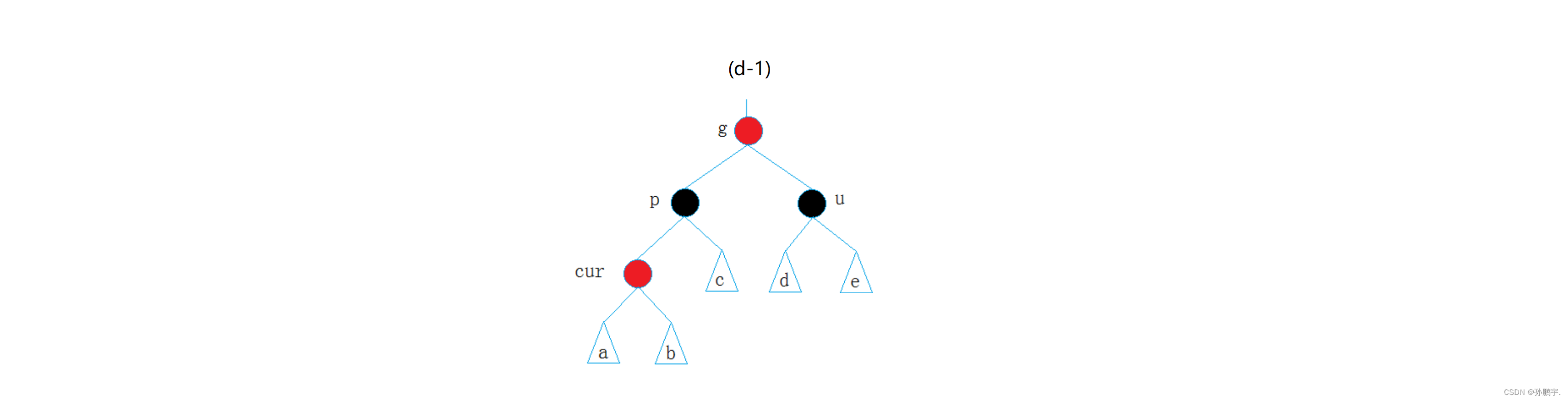
这个时候万一g节点的父节点是红色节点,如图(d-4): 两个红色节点不能连续,还要调整,如果g节点的父亲节点为黑色,如图(d-5),那就不需要再调整:
两个红色节点不能连续,还要调整,如果g节点的父亲节点为黑色,如图(d-5),那就不需要再调整:

新增节点给红色:
cur = new Node(kv);cur->_col = RED;if (parent->_kv.first < kv.first){paret->_right = cur;cur->_parent = parent;}else if (_parent->_kv.first > kv.first){parent->_left = cur;cur->_parent = parent;}父亲节点是红色就调整,是黑色就不用调整:
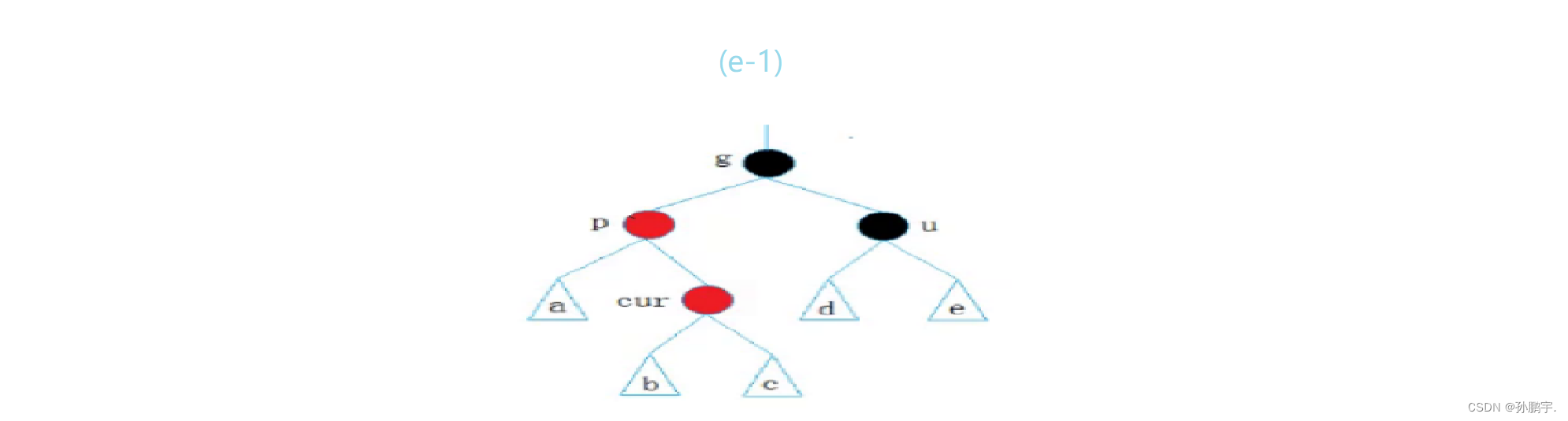
while (parent->_col = RED){}父亲节点可能在左边(e-1),也可能在右边(e-2):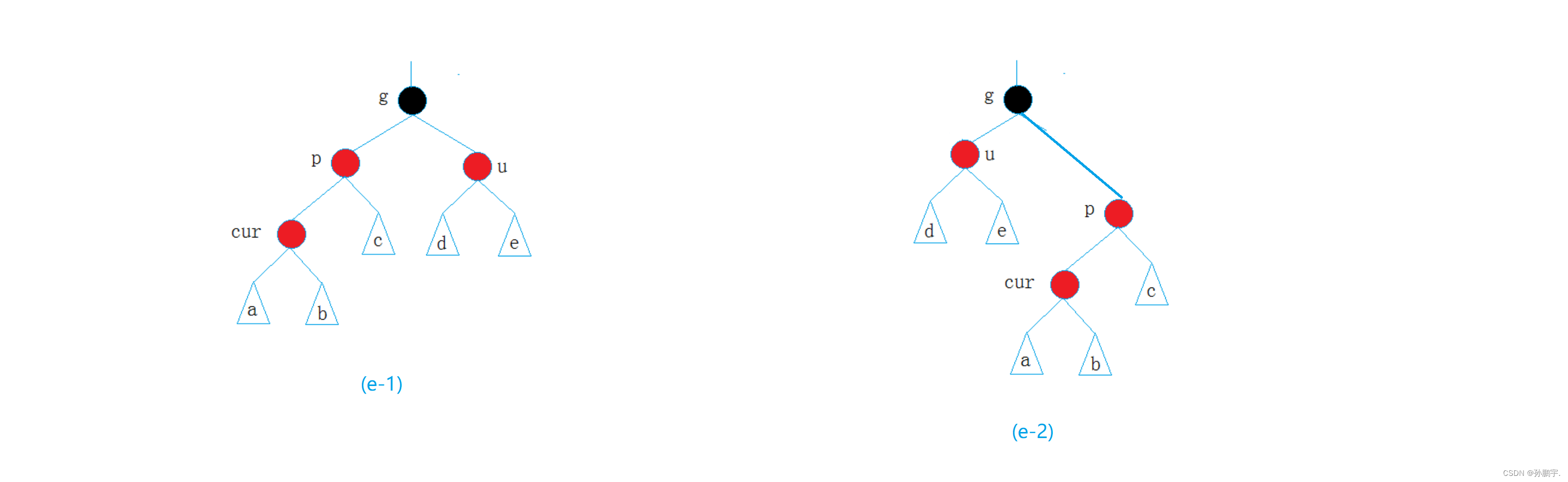 但是不论父亲节点在左在右,父亲节点的父亲父亲节点肯定是granparent节点。
但是不论父亲节点在左在右,父亲节点的父亲父亲节点肯定是granparent节点。
先说图(e-1)的情况(即父亲节点在左):
按照之前的推演,应该先把父亲节点和叔叔节点变为黑色,然后为了防止影响了上面的节点,还要把grandparent节点变为红色:
while (parent&& parent->_col = RED) //当父亲为红色时{Node* grandparent = parent->_parent;//祖父节点是父亲节点的父亲节点if (parent = grandparent->_left)//第一种情况,叔叔节点在右时{Node* uncle = grandparent->_right;//叔叔节点在祖父节点的右边if (unlce && unluce->_col == RED){uncle->_col = parent->_col = BLACK;//叔叔节点的颜色要变成黑色grandparent->_col = RED;//祖父节为了平衡,要把父亲节的颜色变为红色即变为图(d-1):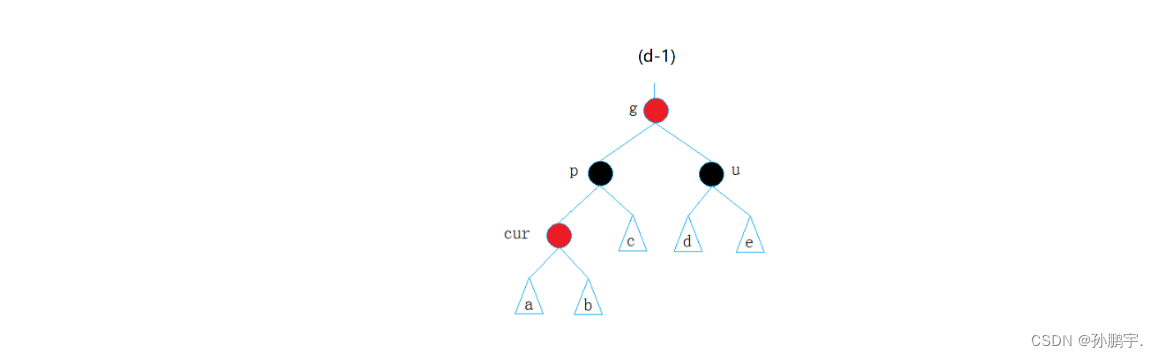
此时又有两种情况 (d-4),(d-5):

(d-4)(d-5)的情况会在后续处理。
继续向上处理
这个时候把祖父节点当做当前节点,让祖父节点去找它的父亲
}while (parent&& parent->_col = RED) //当父亲为红色时{Node* grandparent = parent->_parent;//祖父节点是父亲节点的父亲节点if (parent = grandparent->_left)//第一种情况,叔叔节点在右时{Node* uncle = grandparent->_right;//叔叔节点在祖父节点的右边if (unlce && unluce->_col == RED){uncle->_col = parent->_col = BLACK;//叔叔节点的颜色要变成黑色grandparent->_col = RED;//祖父节为了平衡,要把父亲节的颜色变为红色//继续向上处理cur = grandparent; //把祖父节点当做当前节点parent = cur->parent; //祖父节点去找它的父亲}}}
这个时候万一祖父节点向上不再有节点,祖父节点就是最终节点怎么办?
祖父节点若上面没有节点,那么祖父节点就是作为根节点,根节点不能为红,把根节点再变黑。(r如图(D-5):
while (parent->_col = RED){Node* grandparent = parent->_parent;//祖父节点是父亲节点的父亲节点if (parent = grandparent->_left)//第一种情况,父亲节点是左子树,叔叔节点是右子树{Node* uncle = grandparent->_right;//叔叔节点在祖父节点的右边uncle->_col=parent->_col= BLACK;//叔叔节点的颜色要变成黑色grandparent->_col = RED;//祖父节为了平衡,要把父亲节的颜色变为红色}//把祖父当成当前节点,继续向上处理cur = grandparent;}//祖父节点向上不再有节点,祖父节点作为根节点,必须为黑色_root->_col = BACK;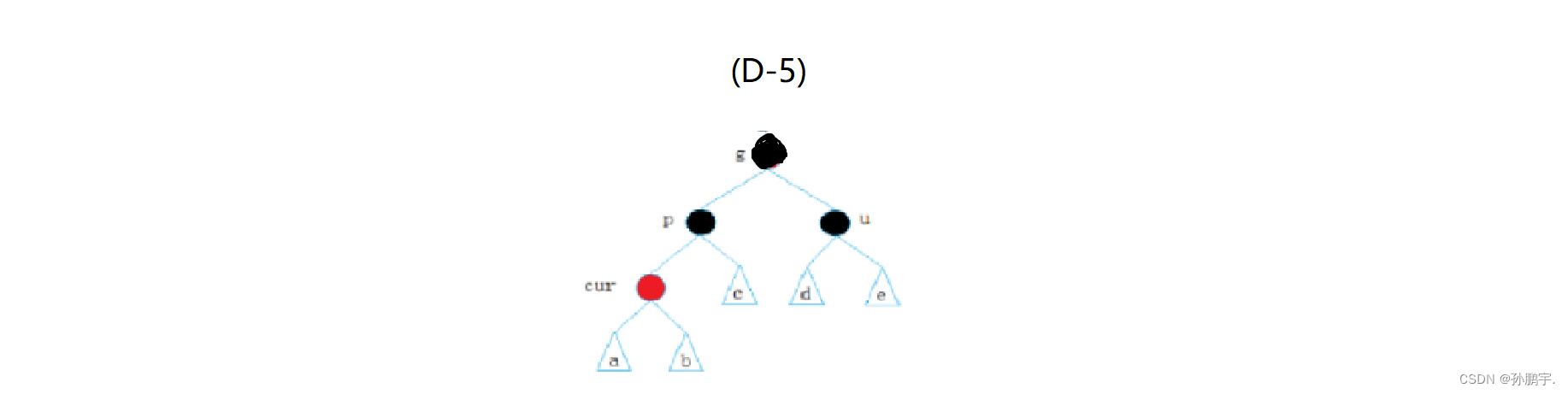
情况二: cur为红,p为红,g为黑,u不存在/u存在且为黑
解决:把祖父右旋走 ,让父亲做新根,根就要为黑色节点,再把父亲变黑:
图(0-0)到(0-1)为演变过程: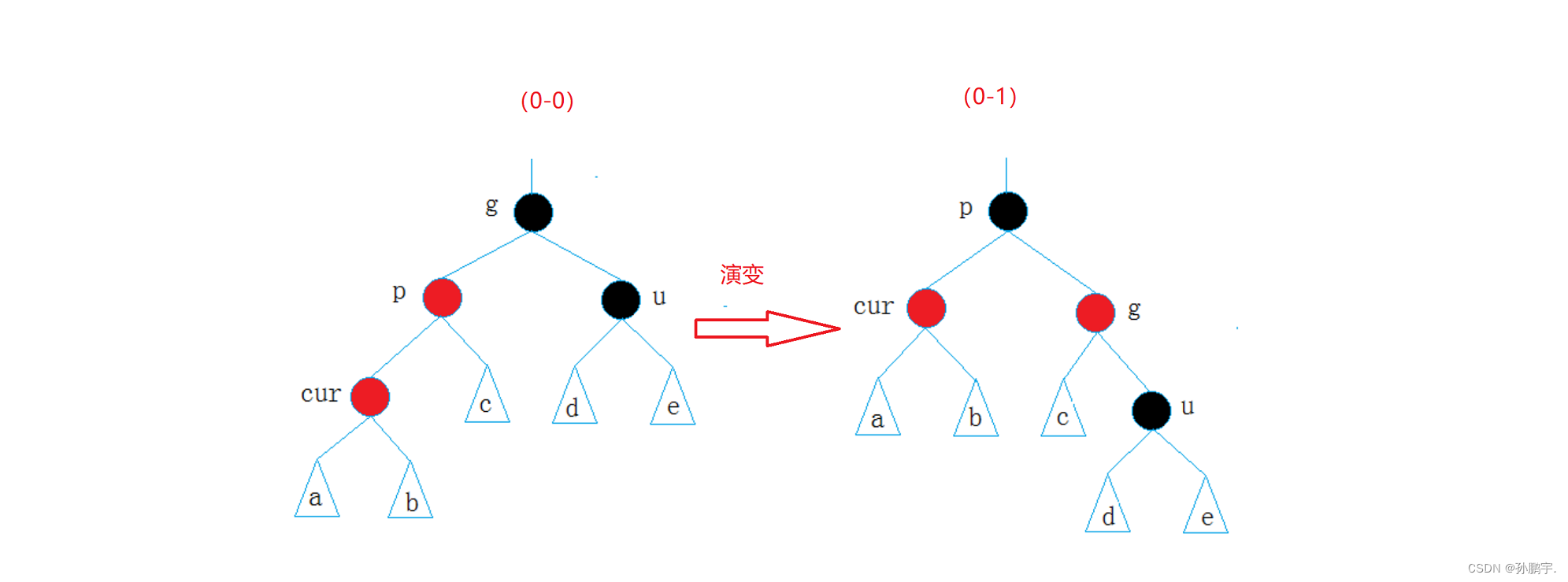
while (parent&& parent->_col = RED) //当父亲为红色时{Node* grandparent = parent->_parent;//祖父节点是父亲节点的父亲节点if (parent = grandparent->_left)//第一种情况,叔叔节点在右时{Node* uncle = grandparent->_right;//叔叔节点在祖父节点的右边if (unlce && unluce->_col == RED){uncle->_col = parent->_col = BLACK;//叔叔节点的颜色要变成黑色grandparent->_col = RED;//祖父节为了平衡,要把父亲节的颜色变为红色//继续向上处理cur = grandparent; //把祖父节点当做当前节点parent = cur->parent; //祖父节点去找它的父亲}else //第二种情况:叔叔节点在左边{if (cur == parent->left) //当前节点在父亲节点的左边{ //单旋+变色 RotateR(granparent); //旋转:把祖父右旋走,让父亲做新根parent->_col = BLACK; //变色:做新根就要为黑色节点grandparent->_col = RED; //祖父为了平衡变红}}}}//祖父节点向上不再有节点,祖父节点作为根节点,必须为黑色_root->_col = BLACK;情况三:p为g的左孩子,cur为p的右孩子(如图e-1)
解决方案
(A)p为g的左孩子,cur为p的右孩子,则针对p做左单旋转;相反,
(B)p为g的右孩子,cur为p的左孩子,则针对p做右单旋转
图(e-1)符合(A)解决方案,以下是对图(e-1)用(A)方案进行推演的过程: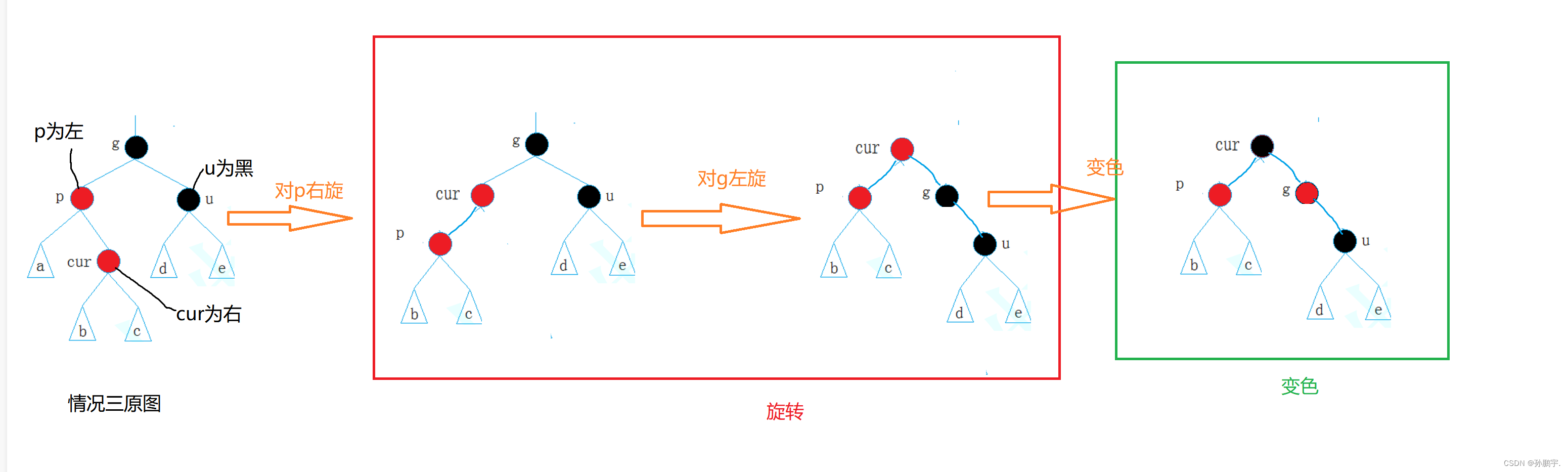
else 父亲在右边
如图(f-3):
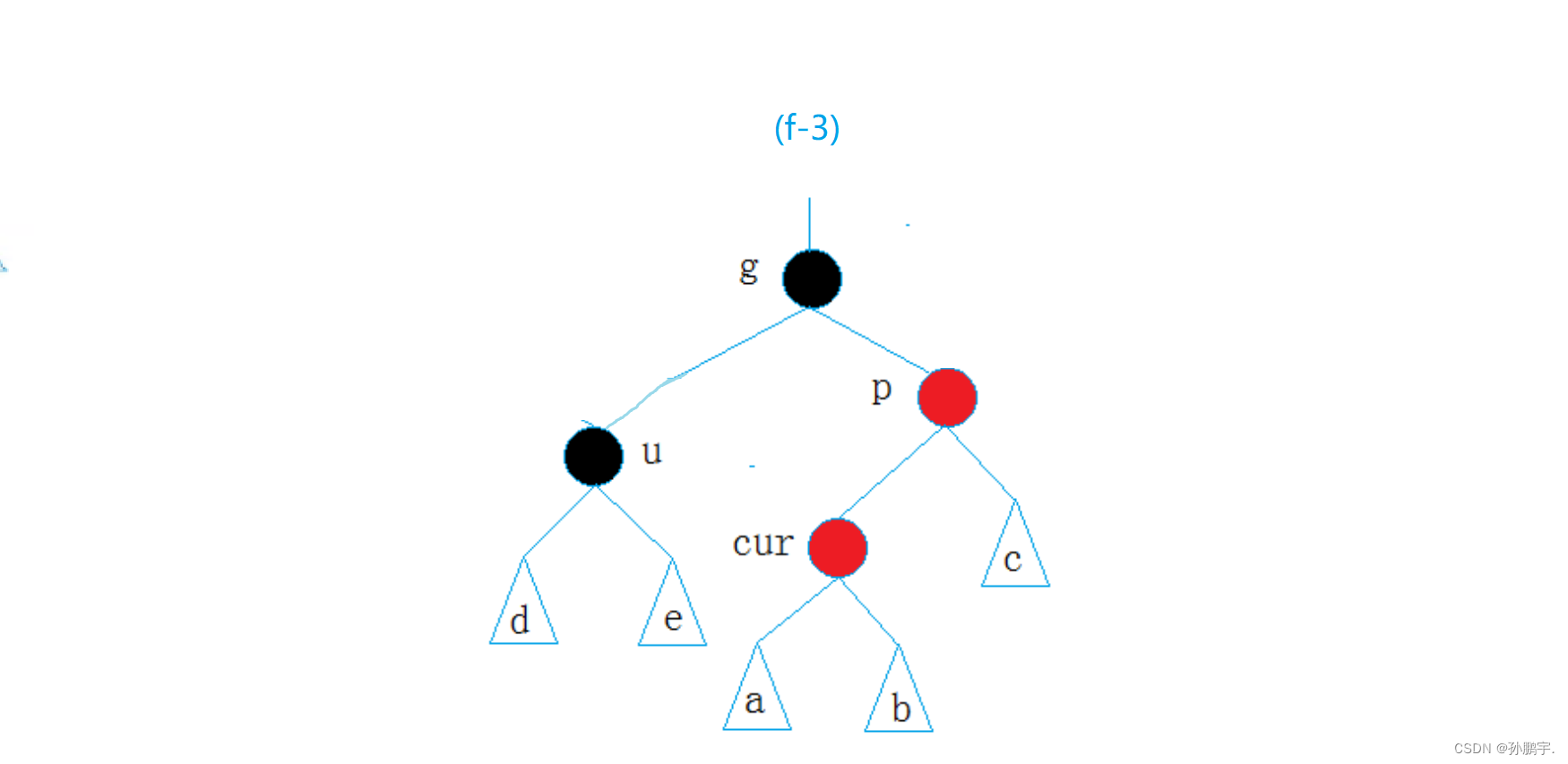
while (parent&& parent->_col == RED) //当父亲为红色时{Node* grandparent = parent->_parent;//祖父节点是父亲节点的父亲节点if (parent = grandparent->_left)//第一种情况,叔叔节点在右时{Node* uncle = grandparent->_right;//叔叔节点在祖父节点的右边if (uncle && uncle->_col == RED){uncle->_col = parent->_col = BLACK;//叔叔节点的颜色要变成黑色grandparent->_col = RED;//祖父节为了平衡,要把父亲节的颜色变为红色//继续向上处理cur = grandparent; //把祖父节点当做当前节点parent = cur->_parent; //祖父节点去找它的父亲}else //第二种情况:叔叔节点在左边{if (cur == parent->_left) //当前节点在父亲节点的左边{ //单旋+变色 RotateR(grandparent); //旋转:把祖父右旋走,让父亲做新根parent->_col = BLACK; //变色:做新根就要为黑色节点grandparent->_col = RED; //祖父为了平衡变红}else //当前节点在父亲节点右边{ //双旋 RotateL(parent); //父亲右旋RotateR(grandparent); //祖父右旋cur->_col = BLACK; //当前节点变黑grandparent->_col = RED; //祖变红}break;}}else //父亲在右边{Node* uncle = grandparent->_left;//叔叔节点在祖父节点的右边if (uncle = grandparent->_left) //叔叔在左边//变色if (uncle && uncle->_col == parent->_col == RED) //if叔叔存在且颜色为红色{uncle->_col = parent->_col = BLACK; //叔叔父亲都变黑grandparent->_col = RED; //祖父上面还有节点,要变红//继续向上处理cur = grandparent;}else //叔叔颜色为黑色{if (cur = parent->_right) //叔叔在右边{RotateL(grandparent); //左旋爷 parent->_col = BLACK;grandparent->_col = RED; //祖变红}else //叔叔在左边{// g// u p// cRotateR(parent); // 父亲右旋RotateL(grandparent); //祖父旋走,让cur当根cur->_col = BLACK; //根变黑色grandparent->_col = RED; //祖父为了平衡变红色}}}}//祖父节点向上不再有节点,祖父节点作为根节点,必须为黑色_root->_col = BLACK;//找到了返回true1return true;
}相关文章:
C++ RBTree 理论
目录 这个性质可以总结为 红黑树的最短最长路径 红黑树的路径范围 code 结构 搞颜色 类 插入 插入逻辑 新插入节点 思考:2. 检测新节点插入后,红黑树的性质是否造到破坏? 解决方法 变色 旋转变色 第三种情况,如果根…...

制作这种在线宣传画册,可轻松收获客户!
制作企业宣传画册,首先要了解企业制作宣传画册的需求以及展示方向,如今互联网时代,宣传画册的制作也应该要创新,而制作一本在线电子宣传画册用于线上宣传是非常有必要的。如何制作呢? 我们 可以使用FLBOOK平台在线制作…...
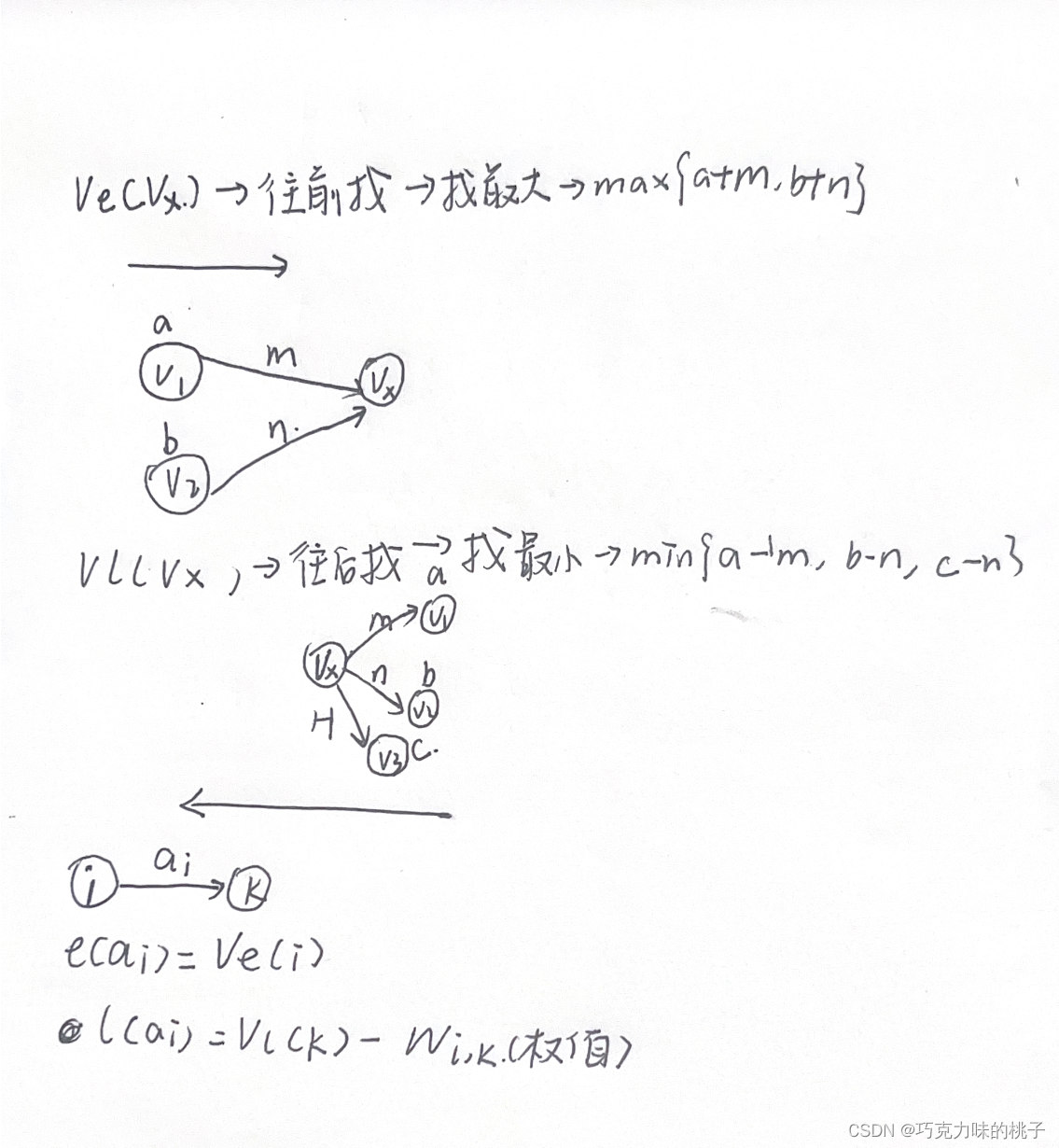
数据结构 | 图
最小生成树算法 Prime算法 算法思路:从已选顶点所关联的未选边中找出权重最小的边,并且生成树不存在环。 其中,已选顶点是构成最小生成树的结点,未选边是不属于生成树中的边。 例子: 第一步: 假设我们从顶…...

[文件读取]shopxo 文件读取(CNVD-2021-15822)
1.1漏洞描述 漏洞编号CNVD-2021-15822漏洞类型文件读取漏洞等级⭐⭐漏洞环境VULFOCUS攻击方式 描述: ShopXO是一套开源的企业级开源电子商务系统。 ShopXO存在任意文件读取漏洞,攻击者可利用该漏洞获取敏感信息。 1.2漏洞等级 高危 1.3影响版本 ShopXO 1.4漏洞复现…...

zookeeper应用之分布式锁
在分布式系统中多个服务需要竞争同一个资源时就需要分布式锁,这里使用zookeeper的临时顺序节点来实现分布式锁。 在节点X下创建临时顺序节点,getChildren()获取节点X的所有子节点,判断当前节点是否是第一个子节点,如果是就获取锁…...

20. 机器学习——PCA 与 LDA
机器学习面试题汇总与解析——PCA 与 LDA 本章讲解知识点 什么是数据降维PCA本专栏适合于Python已经入门的学生或人士,有一定的编程基础。 本专栏适合于算法工程师、机器学习、图像处理求职的学生或人士。 本专栏针对面试题答案进行了优化,尽量做到好记、言简意赅。这才是一…...

深度学习准召
准确率(Precision)和召回率(Recall)是两个用来评价一个模型的好坏的指标,它们有不同的意义: 准确率(Precision):准确率是在所有被模型判断为正例的样本中,有…...

AtCoder ABC154
C - Distinct or Not 签到题,注意大小写和以前的不一样 D - Dice in Line 签到题2,用个窗口即可 E - Almost Everywhere Zero 数位DP(搜索)的例题 pos表示当前搜索到的位置(开始为0,结束为n) …...

可以非常明显地感受到,一场有关直播带货的暗流正在涌动
虽然有关直播带货的争论依然还在持续,但是,我们依然无法否认今年的双十一依然是直播带货的高光时刻。无论是以淘宝、京东和拼多多为代表的传统电商平台,还是以抖音、快手为代表的新电商平台,几乎都将今年双十一的重心放在了直播带…...

C++中的四种构造函数
在C中,有几种不同类型的构造函数,基于它们的特性和用途,可以将它们分类为以下四种: 默认构造函数(Default Constructor): 如果没有为类定义任何构造函数,编译器将为其提供一个默认构造函数。这种…...

通过反射获取某个对象属性是否存在,并获取对象值
SneakyThrowspublic static void main(String[] args) {User user new User("张三", 10);// 获取指定属性名的值String propertyName "name2";Field[] fields user.getClass().getDeclaredFields();// 输出属性名Boolean flag false;for (Field field …...

【MySQL】存储过程与函数
一、存储过程 1、什么是存储过程 它是一组经过预先编译的SQL的封装它被存储在MySQL服务器上,当需要执行它时,客户端只需要向服务器发出调用命令,就可以把这一系列预先存储好的SQL语句全部执行 2、存储过程的优缺点 优点 简化操作…...

【数学】Pair of Topics—CF1324D
Pair of Topics—CF1324D 思路 很明显,需要对 a i a j > b i b j a_i a_j > b_i b_j aiaj>bibj 化简: a i − b i > b j − a j a_i - b_i > b_j - a_j ai−bi>bj−aj a i − b i > − ( a j − b j ) a_…...
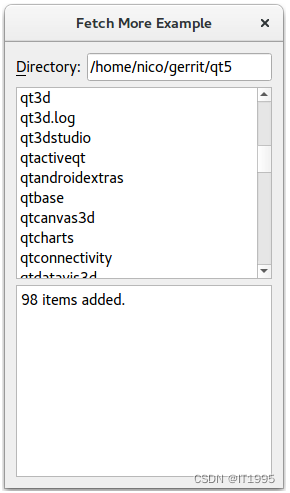
Qt文档阅读笔记-Fetch More Example解析
Fetch More Example这个例子说明了如何在视图模型上添加记录。 这个例子由一个对话框组成,在Directory的输入框中,可输入路径信息。应用程序会载入路径信息的文件信息等。不需要按回车键就能搜索。 当有大量数据时,需要对视图模型进行批量增…...

QtC++与QTableView详解
介绍 QTableView 是 Qt 框架中用于显示表格数据的视图控件,它是 QAbstractItemView 类的子类。QTableView 通常与 QStandardItemModel 或者自定义的数据模型一起使用,用于展示二维表格型数据。以下是对 QTableView 的详细讲解和在 Qt 中的作用ÿ…...

HG/T 6002-2022 氟树脂粉末涂料检测
氟树脂粉末涂料是指以三氟氯乙烯-乙烯基醚、四氟乙烯-乙烯基醚等交联型氟树脂或聚偏二氟乙烯PVDF树脂为主要成膜物质,可加入颜料、填料、助剂、固化剂等制成的粉末涂料,主要用于铝型材、幕墙金属板、家电等表面的装饰和保护。 HG/T 6002-2022 氟树脂粉末…...

【java】idea可以连接但看不到database相关的files
问题 idea右侧有database工具栏,但点击没有在recent files看到数据库相关文件 问题排查 点击 help-> show log in explorer查看日志 发现显示 2023-11-13 10:28:09,694 [1244376] INFO - #c.i.c.ComponentStoreImpl - Saving appDebuggerSettings took 22…...

信驰达科技加入车联网联盟(CCC),推进数字钥匙发展与应用
CCC)的会员。 图 1 深圳信驰达正式成为车联网联盟(CCC)会员 车联网联盟(CCC)是一个跨行业组织,致力于推动智能手机与汽车连接解决方案的技术发展。CCC涵盖了全球汽车和智能手机行业的大部分企业,拥有150多家成员公司。CCC成员公司包括智能手机和汽车制造…...

p9 Eureka-搭建eureka服务
1.在user-service项目引入spring-cloud-starter-netflix-eureka-client的依赖 <dependencies><dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-netflix-eureka-server</artifactId></depen…...
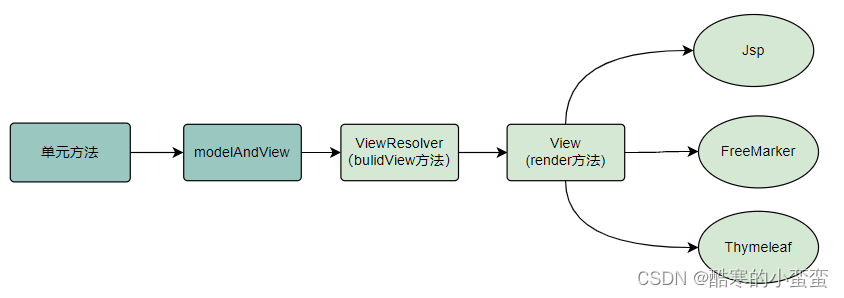
阶段七-Day01-SpringMVC
一、Sping MVC的介绍 1. 使用Front(前端)设计模式改写代码 1.1 目前我们的写法 目前我们所写的项目,持久层、业务层的类都放入到Spring容器之中了。他们之间需要注入非常方便,只需要通过Autowired注解即可。 但是由于Servlet整个生命周期都是被Tomca…...
)
别再乱用npm install了!手把手教你用npx only-allow为项目指定包管理器(支持pnpm/yarn/npm)
用only-allow统一团队包管理器:从配置到CI的全流程指南 你是否曾经在拉取一个新项目后,面对npm install、yarn还是pnpm i的抉择感到困惑?或者更糟的是,团队成员混用不同包管理器导致node_modules结构不一致,引发各种诡…...

BurpSuite 2025插件开发JDK版本兼容性实战指南
1. 为什么BurpSuite插件开发环境总在JDK版本上翻车?你是不是也经历过:下载好BurpSuite最新版2025.4,兴冲冲打开插件开发文档,照着官方示例写完第一个HelloWorld插件,一编译——java.lang.UnsupportedClassVersionError…...

随机森林算法在儿童出行方式预测中的实战应用与优化
1. 项目概述:用随机森林预测孩子怎么上学做城市交通规划或者做家长接送方案的时候,你肯定想过一个问题:孩子们到底是怎么上学的?是走路、骑车、坐公交还是家长开车送?这个问题看似简单,背后却牵扯到城市规划…...

操作符从浅入深的讲解
1. 操作符的分类 2. ⼆进制和进制转换 3. 原码、反码、补码 4. 移位操作符 5. 位操作符:&、|、^、~ 6. 单⽬操作符 7. 逗号表达式 8. 下标访问[]、函数调⽤() 9. 结构成员访问操作符 10. 操作符的属性:优先级、结合性 11. 表达式求值1.操作符的分类以…...

Redis 客户端连接详解
Redis 客户端连接详解 引言 Redis 是一款高性能的内存数据结构存储系统,常用于缓存、会话管理、实时排行榜等功能。客户端连接是 Redis 生态系统中的重要组成部分,本文将详细介绍 Redis 客户端连接的相关知识,包括连接方式、连接配置、连接管理等方面。 Redis 客户端连接…...

如何优化 MySQL 千万级数据分页查询的性能?
它的本质是:**传统 LIMIT offset, size 在大数据量下性能急剧下降,是因为 MySQL 必须 扫描并丢弃 前 offset 行数据。当 offset 很大时(如 LIMIT 1000000, 10),MySQL 需要读取 1,000,010 行记录,执行 1,000…...

DeepSeek-R1代码补全实测报告:37个真实项目、8类编程语言、48小时压测后,我删掉了Copilot
更多请点击: https://intelliparadigm.com 第一章:DeepSeek-R1代码补全实测报告总览 DeepSeek-R1 是深度求索(DeepSeek)推出的开源大语言模型,专为代码理解与生成任务优化。本章聚焦其在主流 IDE 环境中代码补全能力的…...

从API调用成功率看Taotoken服务的稳定性与容灾表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从API调用成功率看Taotoken服务的稳定性与容灾表现 在将大模型能力集成到自动化流程或日常开发工具链时,服务的稳定性和…...

VideoDownloadHelper终极指南:解锁浏览器视频下载的完整解决方案
VideoDownloadHelper终极指南:解锁浏览器视频下载的完整解决方案 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法保存网…...

HKMG工艺的“阿喀琉斯之踵”:聊聊那个无法移除的SiON界面层与未来0.3nm的挑战
HKMG工艺的隐形枷锁:SiON界面层的物理宿命与亚纳米级突围战 在半导体工艺演进的史诗中,HKMG(高K金属栅)技术曾被寄予厚望——它用金属栅极替代传统多晶硅,搭配高K介质材料HfO₂,一举解决了栅极耗尽和漏电流…...