PatchMatchNet笔记
PatchMatchNet笔记
- 1 概述
- 2 PatchmatchNet网络结构图
- 2.1 多尺度特征提取
- 2.2 基于学习的补丁匹配
- 3 性能评价
PatchmatchNet: Learned Multi-View Patchmatch Stereo:基于学习的多视角补丁匹配立体算法
1 概述
特点
高速,低内存,可以处理更高分辨率的图像,它的效率比所有现有的性能最好的模型都要高得多: 比最先进的方法至少快2.5倍,内存使用量减少一倍。
首次在端到端可训练架构中引入了迭代的多尺度Patchmatch,并用一种新颖的、可学习的自适应传播和每次迭代的评估方案改进了传统Patchmatch核心算法。
主要贡献
基于学习的方法比传统的方法有优势,但是受限于内存和运行时间,于是将补丁匹配的想法引入到端到端可训练的深度学习中,用可学习的自适应模块增强了补丁匹配的传统传播和代价评估步骤,减少了内存消耗和运行时间。
2 PatchmatchNet网络结构图
补丁匹配网络的结构:多尺度特征提取器、基于学习的补丁匹配和细化。补丁匹配应用于多个阶段的多次迭代,以从粗到细的方式预测深度映射。细化使用输入来指导最终深度贴图的上采样。在阶段k上,深度图的分辨率为W/ 2 k× H/2 k,输入图像的大小为W×H。

2.1 多尺度特征提取
给定N张大小为W×H的输入图像,使用I0和I1,…,In分别表示参考图像和源图像。
特征是在多个分辨率下分层提取的(像特征金字塔结构),可以粗到细的方式推进深度地图估计。

2.2 基于学习的补丁匹配
补丁匹配包括以下三个主要步骤:
1.初始化:生成随机的深度假设。
2.传播:向邻域传播假设。
3.评价:计算所有假设的匹配代价,并选择最佳解。

2.2.1 初始化与局部扰动
基于预定义的深度范围[dmin,dmax],在反深度范围内对每像素的Df深度假设进行采样,对应于图像空间中的均匀采样。
对于第k阶段的后续迭代,通过在归一化的反深度范围Rk中均匀地生成每像素的Nk假设来执行局部扰动,并在更精细的阶段中逐渐减少Rk。
为了定义Rk的中心,利用了前一次迭代的估计,从一个较粗的阶段上采样。这提供了一组更多样化的假设。围绕之前的估计进行采样,可以在局部细化结果并纠正错误的估计。
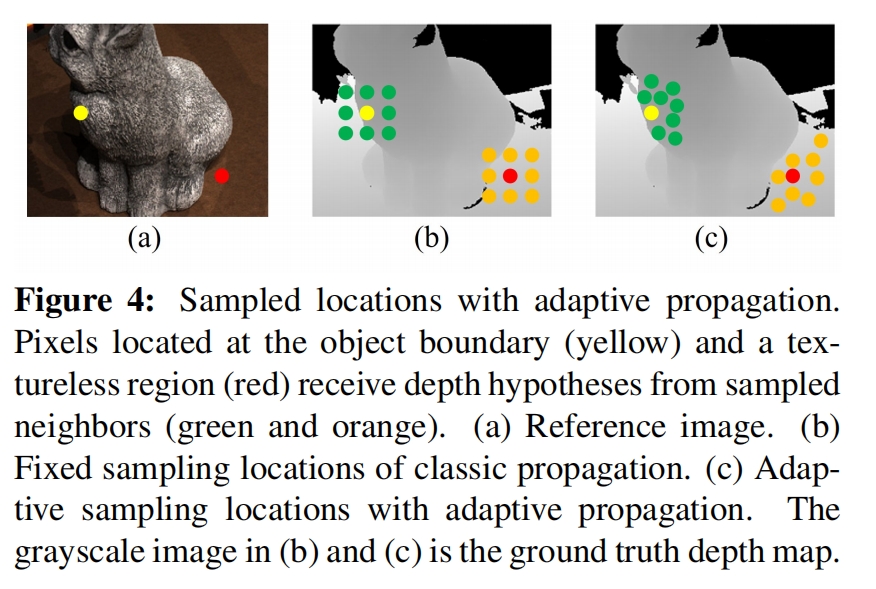
2.2.2 自适应传播
在参考特征图F0上应用二维CNN,学习每个像素p的额外二维偏移量,并通过双线性插值得到深度假设Dp §如下:
D p ( p ) = D ( p + o i + Δ o i ( p ) ) i = 1 K p D_{p}(p)={D(p+o_{i}+\Delta o_{i}(p))}_{i=1}^{K_{p}} Dp(p)=D(p+oi+Δoi(p))i=1Kp
其中,D是来自前一次迭代的深度映射,可能来自一个较粗的阶段经过向上采样获得。
2.2.3 自适应评价和可微分的翘曲
自适应评估模块执行以下步骤:可微扭曲、匹配代价计算、自适应空间代价聚合和深度回归。
在平面扫描立体之后,大多数基于学习的MVS方法在采样深度假设下建立前端到平行平面,并将源图像的特征图扭曲成参考图。
p i , j = K i ⋅ ( R 0 , i ⋅ ( K 0 − 1 ⋅ p ⋅ d j ) + t 0 , i p_{i,j}=K_{i}·(R_{0,i}·(K_{0}^{-1}·p·d_{j})+t_{0,i} pi,j=Ki⋅(R0,i⋅(K0−1⋅p⋅dj)+t0,i
通过可微双线性插值,我们得到了视图i的扭曲源特征图和第j组(每像素不同的)深度假设,Fi(pi,j)。
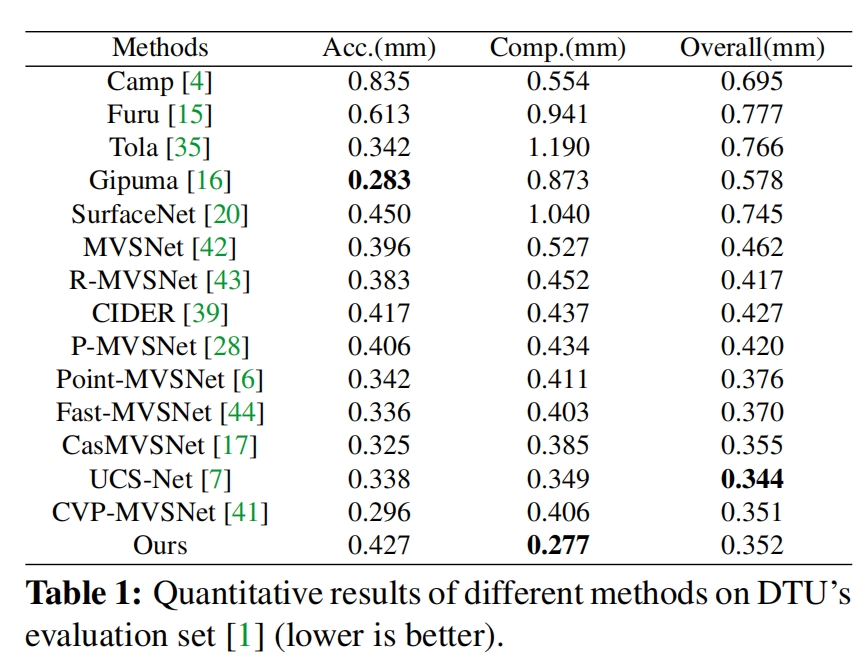
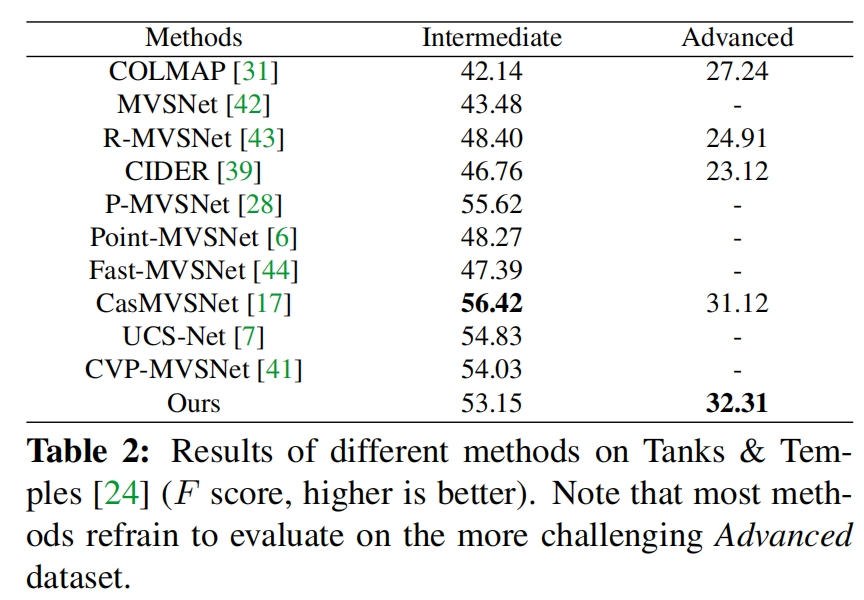
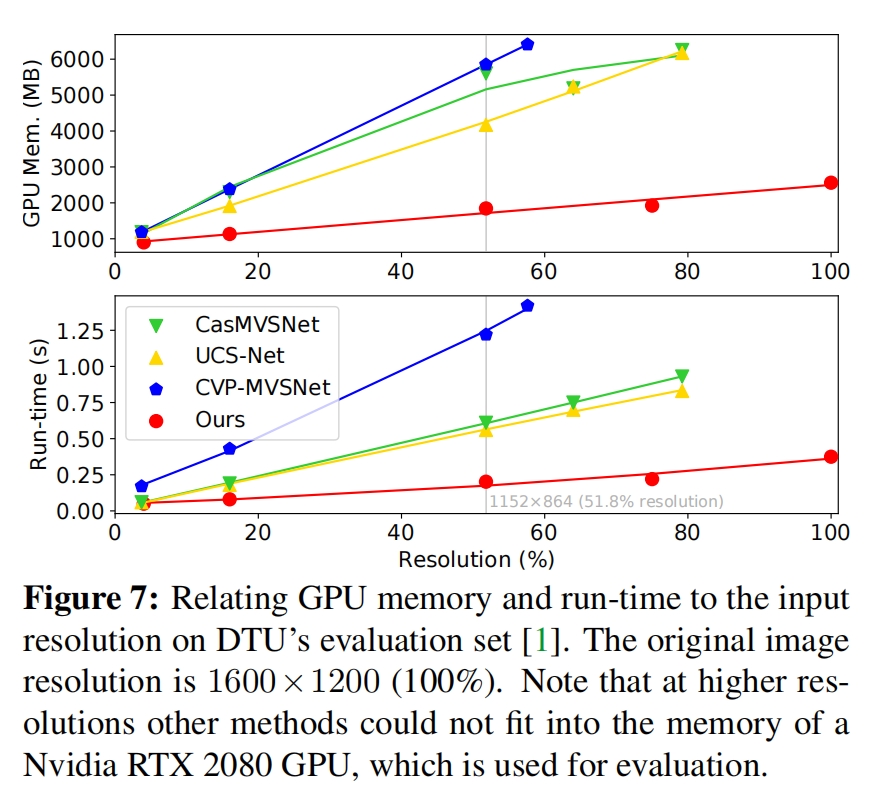
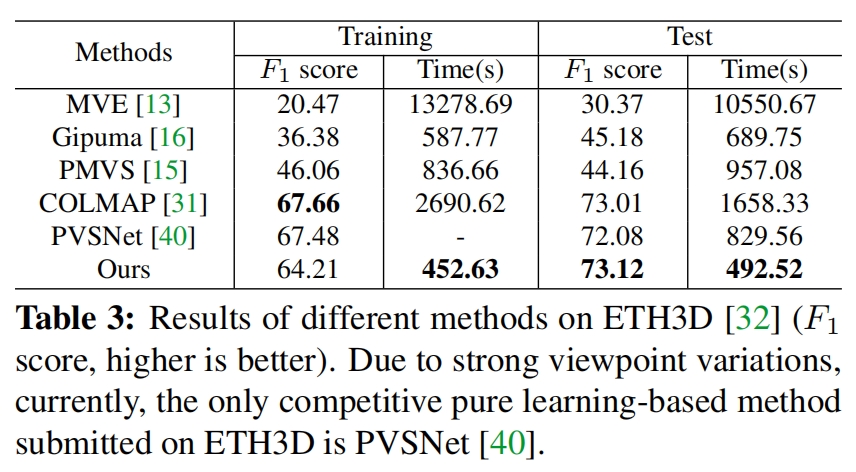
3 性能评价
相关文章:
PatchMatchNet笔记
PatchMatchNet笔记 1 概述2 PatchmatchNet网络结构图2.1 多尺度特征提取2.2 基于学习的补丁匹配 3 性能评价 PatchmatchNet: Learned Multi-View Patchmatch Stereo:基于学习的多视角补丁匹配立体算法 1 概述 特点 高速,低内存,可以处理…...

实时人眼追踪、内置3D引擎,联想ThinkVision裸眼3D显示器创新四大应用场景
11月17日,在以“因思而变 智领未来”为主题的Think Centre和ThinkVision 20周年纪念活动上,联想正式发布了业内首款2D/3D 可切换裸眼3D显示器——联想ThinkVision 27 3D。该产品首次将裸眼2D、3D可切换技术应用在显示器领域,并拓展了3D技术多…...
)
SELinux零知识学习十四、SELinux策略语言之客体类别和许可(8)
接前一篇文章:SELinux零知识学习十三、SELinux策略语言之客体类别和许可(7) 一、SELinux策略语言之客体类别和许可 4. 客体类别许可实例 (2)文件客体类别许可 文件客体类别有三类许可:直接映像到标准Lin…...
Unity——URP相机详解
2021版本URP项目下的相机,一般新建一个相机有如下组件 1:Render Type(渲染类型) 有Base和Overlay两种选项,默认是Base选项 Base:主相机使用该种渲染方式,负责渲染场景中的主要图形元素 Overlay(叠加):使用了Oveylay的…...

CRUD-SQL
文章目录 前置insertSelective和upsertSelective使用姿势手写sql,有两种方式 一、增当导入的数据不存在时则进行添加,有则更新 1.1 唯一键,先查,后插1.2 批量插1.2.1 批次一200、批次二200、批次三200,有一条数据写入失…...

【C语言 | 数组】C语言数组详解(经典,超详细)
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...

第三十三节——组合式API生命周期
一、基本使用 组合式api生命周期几乎和选项式一致。注意组合式api是从挂载阶段开始 <template><div></div> </template> <script setup> import {onBeforeMount, onMounted,onBeforeUpdate, onUpdated, onBeforeUnmount, onUnmounted, } from …...

【Linux】Alibaba Cloud Linux 3 安装 PHP8.1
一、系统安装 请参考 【Linux】Alibaba Cloud Linux 3 中第二硬盘、MySQL8.、MySQL7.、Redis、Nginx、Java 系统安装 二、安装源 rpm -ivh --nodeps https://rpms.remirepo.net/enterprise/remi-release-8.rpm sed -i s/PLATFORM_ID"platform:al8"/PLATFORM_ID&q…...
【容器化】Kubernetes(k8s)
文章目录 概述Docker 的管理痛点什么是 K8s云架构 & 云原生 架构核心组件K8s 的服务注册与发现组件调用流程部署单机版部署主从版本Operator来源拓展阅读 概述 Docker 虽好用,但面对强大的集群,成千上万的容器,突然感觉不香了。 这时候就…...

stm32 HSUSB
/ stm32f407xx.h #define USB_OTG_HS_PERIPH_BASE 0x40040000UL #define USB_OTG_HS ((USB_OTG_GlobalTypeDef *) USB_OTG_HS_PERIPH_BASE) // // 定义全局变量 USBD_HandleTypeDef hUsbDeviceHS;并默认全零初始化/* USB Device handle structure */ typedef struct _USB…...

C# String.Trim 方法
String.Trim()方法定义: 命名空间:System 程序集:System.Runtime.dll 返回结果:返回一个新字符串,它相当于从当前字符串中删除了一组指定字符的所有前导匹配项和尾随匹配项。 Trim方法有三个重载的方法,…...

<Linux>(极简关键、省时省力)《Linux操作系统原理分析之Linux 进程管理 4》(8)
《Linux操作系统原理分析之Linux 进程管理 4》(8) 4 Linux 进程管理4.4 Linux 进程的创建和撤销4.4.1 Linux 进程的族亲关系4.4.2 Linux 进程的创建4.4.3 Linux 进程创建的过程4.4.4 Linux 进程的执行4.4.5 Linux 进程的终止和撤销 4 Linux 进程管理 4.…...
RT-Thread STM32F407 PWM
为了展示PWM效果,这里用ADC来采集PWM输出通道的电平变化 第一步,进入RT-Thread Settings配置PWM驱动 第二步,进入board.h,打开PWM宏 第三步,进入STM32CubeMX,配置时钟及PWM 第四步,回到R…...
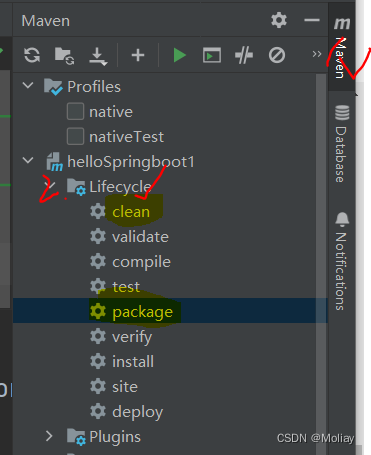
idea中把spring boot项目打成jar包
打jar包 打开项目,右击项目选中Open Module Settings进入project Structure 选中Artifacts,点击中间的加号(Project Settings->Artifacts->JAR->From modules with dependencies ) 弹出Create JAR from Modules&#…...

levelDB之基础数据结构-Slice
Slice是levelDB中用于操作字符串的数据结构,以字节为单位。 定义与实现 namespace leveldb {class LEVELDB_EXPORT Slice {public:// Create an empty slice.Slice() : data_(""), size_(0) {}// Create a slice that refers to d[0,n-1].Slice(const c…...

上位机模块之通用重写相机类
在常用的视觉上位机中,我们通常会使用单个上位机匹配多个相机或者多品牌相机,所以在此记录一个可重写的通用相机类,用于后续长期维护开发。 先上代码。 using HalconDotNet; using System.Collections.Generic;namespace WeldingInspection.M…...

机器人导航+OPENCV透视变换示例代码
透视变换又称四点变换,所以不能用于5边形这样的图形变换,不是真正的透视变换,但是这个方法可以把机器人看到的图像转换为俯视图,这样就可以建立地图,要不然怎么建立地图呢。 void CrelaxMyFriendDlg::OnBnClickedOk()…...
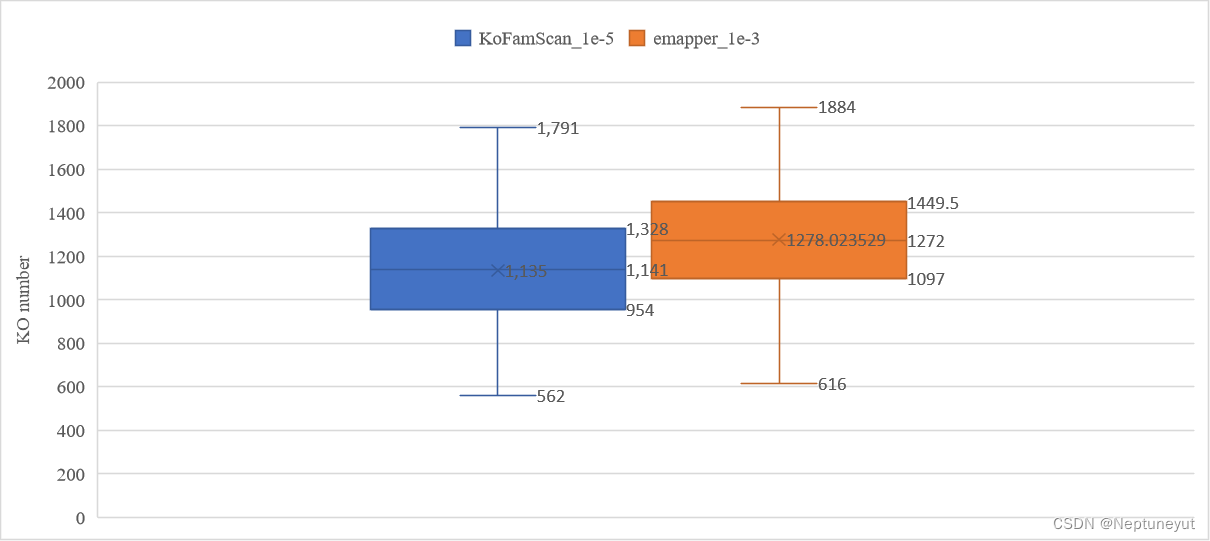
KofamScan-KEGG官方推荐的使用系同源和隐马尔可夫模型进行KO注释
文章目录 简介安装使用输入蛋白序列输出detail-tsv格式输出detail格式输出mapper格式 输出结果detail和detail-tsv格式mapper格式常用命令tmp目录 与emapper结果比较其他参数参考 简介 KofamScan 是一款基于 KEGG 直系同源和隐马尔可夫模型(HMM)的基因功…...
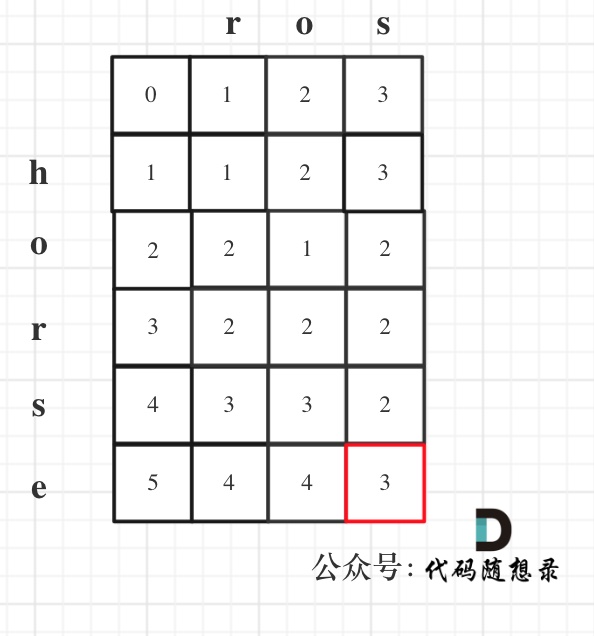
代码随想录算法训练营第五十五天丨 动态规划part16
583. 两个字符串的删除操作 思路 #动态规划一 本题和动态规划:115.不同的子序列 (opens new window)相比,其实就是两个字符串都可以删除了,情况虽说复杂一些,但整体思路是不变的。 这次是两个字符串可以相互删了,这…...

【Linux】kernel与应用消息队列的一种设计
Linux进程间通讯的方式有很多种,这里介绍一种通过消息队列的方式来实现kernel与APP之间的消息收发实现方式,这种方式特别适用于,kernel中发送消息,应用层收取消息。 消息队列设备驱动 该方法的设计思路即是创建一个消息队列的设…...

基于Vue的沧交食堂食品监管系统[vue]-计算机毕业设计源码+LW文档
摘要:本文阐述了一个基于Vue框架开发的沧交食堂食品监管系统。该系统旨在借助现代Web技术,强化对沧交食堂食品安全的监管力度,提升监管效率与质量。系统涵盖了系统用户管理、新闻数据管理、食品相关业务管理以及评论管理等多方面功能。文章详…...

7天打造智能助理:OpenClaw+Qwen3-VL:30B飞书开发周计划
7天打造智能助理:OpenClawQwen3-VL:30B飞书开发周计划 1. 为什么选择这个组合? 去年冬天,我偶然在GitHub上发现了OpenClaw这个项目。当时我正在为团队寻找一个既能处理日常办公自动化,又能理解图片内容的智能助手方案。传统的RP…...

提升开发效率:用快马一键生成快速排序多版本性能对比工具
今天在优化一个数据处理模块时,遇到了需要选择合适排序算法的问题。不同数据特征下,快速排序的各种变体表现差异很大,手动测试效率实在太低。于是我用InsCode(快马)平台快速搭建了一个性能对比工具,整个过程比想象中简单很多。 需…...

2021年中国村级行政区划边界矢量数据|行政村 + 社区|全国60万+单元|SHP格式、WGS84坐标
🔍 数据简介 本数据集 2021年左右的中国村级行政区划边界矢量数据。 总计 超60万个村级单元,是目前公开可获取的最精细、最权威的全国村级边界数据之一,适用于乡村振兴、基层治理、人口空间化、公共服务设施布局、学术研究等高精度需求场景。…...

字节开源AI神器DeerFlow,4.1万星标刷屏,普通人免费就能用
文章目录这玩意儿不是ChatGPT那种"嘴炮型"选手35k星标怎么来的?字节这次把"龙虾"养明白了多智能体协作:不是一个人在战斗沙箱执行:让AI真的"动手"干活对比OpenAI:免费、本地、可控普通人怎么上手&a…...

PvZ Toolkit:植物大战僵尸终极修改器完全指南
PvZ Toolkit:植物大战僵尸终极修改器完全指南 【免费下载链接】pvztoolkit 植物大战僵尸 PC 版综合修改器 项目地址: https://gitcode.com/gh_mirrors/pv/pvztoolkit PvZ Toolkit是一款专为植物大战僵尸PC版设计的综合性游戏修改工具,通过内存读写…...

首款支持AI渗透的WebShell管理工具,聊个天就能实现免杀|实现高隐蔽内网渗透
0x01 工具介绍 金刚狼首款支持 AI 渗透的 WebShell MCP,也是一款支持多层内网级联的 ASPX、ASHX 高级 WebShell 管理工具。工具采用 AES 加密通信,无需代理即可实现内网穿透,支持内存加载各类渗透工具,做到无文件落地隐蔽渗透目标…...

DAC高速线缆市场洞察:预计到2032年将增长至180.8亿元
据恒州诚思调研统计,2025年全球DAC高速线缆市场规模达66.60亿元,预计到2032年将增长至180.8亿元,2026-2032年复合增长率(CAGR)为14.7%。作为数据中心短距离互连的核心组件,DAC高速线缆凭借其低延迟、高可靠…...

3个步骤玩转虚拟手柄模拟:ViGEmBus驱动从入门到精通
3个步骤玩转虚拟手柄模拟:ViGEmBus驱动从入门到精通 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus Windows虚拟手柄驱动技术为游戏玩家和开发者…...
)
别再自己造轮子了!用Python HAPI一键搞定HITRAN/HITEMP光谱计算(附避坑指南)
别再重复造轮子!用Python HAPI高效处理HITRAN/HITEMP光谱数据 在光谱分析领域,许多研究者都曾陷入过这样的困境:为了计算某种气体的光谱特性,花费数周甚至数月时间研读文献、编写算法,结果却发现计算效率低下且结果难以…...