Cross-View Transformers for Real-Time Map-View Semantic Segmentation 论文阅读
论文链接
Cross-View Transformers for Real-Time Map-View Semantic Segmentation
0. Abstract
- 提出了 Cross-View Transformers ,一种基于注意力的高效模型,用于来自多个摄像机的地图视图语义分割
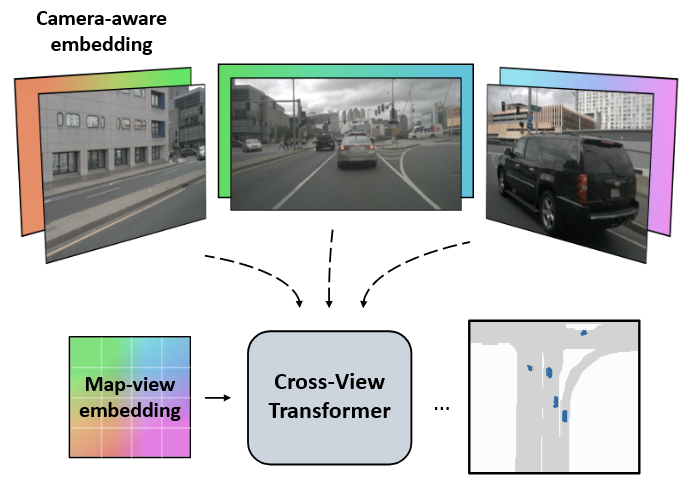
- 使用相机感知的跨视图注意机制隐式学习从单个相机视图到规范地图视图表示的映射
- 该架构由每个视图的卷积图像编码器和跨视图变换层组成,以推断地图视图语义分割
1. Intro
背景
- 基于图像的深度估计很容易出错,因为单眼深度估计与观察者的距离的关系很差
- 基于深度的投影是视图之间映射的相当不灵活且僵化的瓶颈
工作
- 使用该架构将相机视图映射到规范的地图视图表示,该架构不执行任何显式的几何推理,而是通过几何感知的位置嵌入学习在视图之间进行映射
- 多头注意力学习使用学习的地图视图位置嵌入将特征从摄像机视图映射到规范的地图视图表示
- 该模型学习将不同的地图位置链接到两个摄像机以及每个摄像机内的位置
- 交叉视图变换器允许网络隐式地、直接地从数据中学习任何几何变换。通过几何感知位置嵌入尽可能准确地执行下游任务,通过依赖于相机的地图视图位置嵌入来学习深度的隐式估计
2. Related Works
单目三维物体检测
- 单目检测旨在在场景中找到物体,估计它们在三维场景中的真实尺寸、方向和放置位置
- 最常见的方法将问题简化为二维物体检测,并推断单目深度
- 单目检测强烈依赖于一个良好的明确的单目深度估计,这可能更难获得
深度估计
- 深度是许多多视点映射方法的核心要素。经典的运动构造方法利用极线几何和三角测量来显式计算相机外部参数和深度
- 最近的深度学习方法直接从图像回归深度。虽然方便,但显式的深度对于下游任务而言具有挑战性
- 与相机相关,并且需要准确的校准和多个嘈杂估计的融合
地图视图的语义映射
- 输入是在校准过的相机视图中记录的,输出被光栅化到地图上
- 一种常见的技术是假设场景主要是平面的,并将图像到地图视图的转换表示为简单的单应变换
- 第二类方法直接从输入图像生成地图视图预测,没有明确的几何建模
VPN
- 与本文方法思想类似。通过他们提出的视图关系模块 - 一个多层感知器(MLP),从所有视图的输入中输出地图视图特征,学习多个视图之间的共同特征表示
- 缺点
- 没有对场景的几何结构进行建模
- 放弃了标定相机配置中包含的继承归纳偏置,并且需要学习嵌入到网络权重中的隐式相机标定模型
本文工作展示了隐式几何推理与显式几何模型的效果相当。隐式处理几何的附加好处是相比显式模型,在推理速度上有所提高。只需学习一组位置嵌入,注意力机制将重新映射相机到地图视图
3. Cross-view transformers
-
在这个任务中,提供了一组由n个单独视图 ( I k , K k , R k , t k ) k = 1 n (I_k,K_k,R_k,t_k)^n_{k=1} (Ik,Kk,Rk,tk)k=1n 组成的输入图像 I k ∈ R H × W × 3 I_k∈\mathbb{R}^{H×W×3} Ik∈RH×W×3,相机内参 K k ∈ R 3 × 3 K_k∈\mathbb{R}^{3×3} Kk∈R3×3,外参旋转 R k ∈ R 3 × 3 R_k∈\mathbb{R}^{3×3} Rk∈R3×3 和相对于自车中心的平移 t k ∈ R 3 t_k∈\mathbb{R}^3 tk∈R3
-
目标是学习一个高效的模型,从多个相机视图中提取信息,以便预测一个二进制语义分割掩码 y ∈ { 0 , 1 } h × w × C y∈\{0, 1\}^{h×w×C} y∈{0,1}h×w×C 在正交地图视图坐标框架中
-
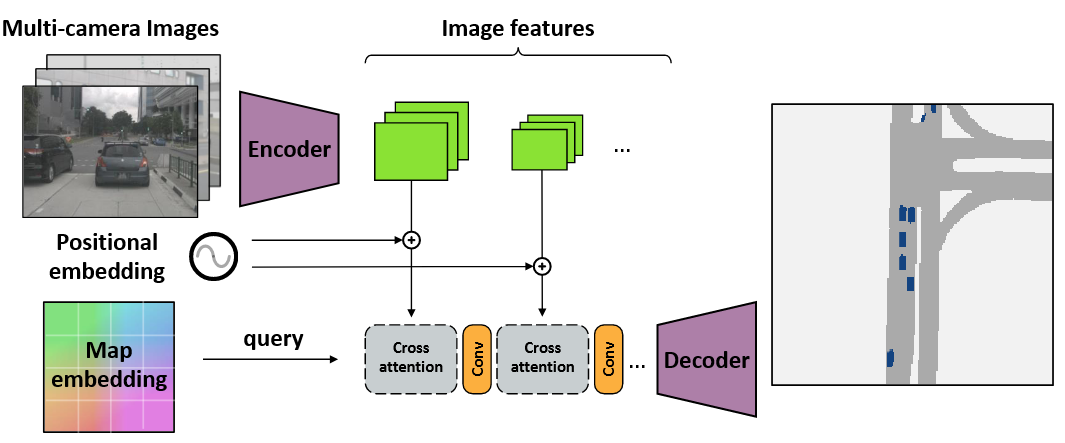
为地图视角语义分割设计了一个简单而有效的编码器-解码器结构
-
图像编码器为每个输入图像生成多尺度特征表示
-
跨视角跨注意机制将多尺度特征聚合成一个共享的地图视角表示。所有相机共享相同的图像编码器,但使用依赖于它们各自相机校准的位置嵌入
-
轻量级的卷积解码器对精炼的地图视角嵌入进行上采样,产生最终的分割输出
-
3.1 Cross-view Attention
-
跨视角注意力的目标是将地图视图表示与图像视图特征相连接
x ( I ) ≃ K k R k ( x ( W ) − t k ) (1) x^{(I)} ≃ K_kR_k(x^{(W)} − t_k) \tag{1} x(I)≃KkRk(x(W)−tk)(1)
≃ ≃ ≃ 表示等比例关系, x ( I ) = ( ⋅ , ⋅ , 1 ) x^{(I)} = (·, ·, 1) x(I)=(⋅,⋅,1) 使用齐次坐标在没有相机视图中准确的深度估计或地图视图中的地面高度估计的情况下,世界坐标 x ( W ) x^{(W)} x(W)是不确定的 。我们不学习深度的显式估计,而是将任何深度不确定性编码在位置嵌入中,并让 Transformer 学习深度的代理
-
从对等式1中的世界坐标和图像坐标之间的几何关系进行重新表述,将其作为余弦相似度在注意机制中使用
s i m k ( x ( I ) , x ( W ) ) = ( R k − 1 K k − 1 x ( I ) ) ⋅ ( x ( W ) − t k ) ∥ R k − 1 K k − 1 x ( I ) ) ∥∥ ( x ( W ) − t k ∥ (2) sim_k(x^{(I)}, x^{(W)}) = \frac{(R^{−1}_k K^{−1}_k x^{(I)}) \cdot (x^{(W)} − t_k)} {∥R^{−1}_k K^{−1}_k x^{(I)})∥∥(x^{(W)} − t_k∥} \tag{2} simk(x(I),x(W))=∥Rk−1Kk−1x(I))∥∥(x(W)−tk∥(Rk−1Kk−1x(I))⋅(x(W)−tk)(2)
这种相似性仍然依赖于准确的世界坐标 w ( W ) w^{(W)} w(W)。用位置编码替换这种相似性的所有几何组件,位置编码可以学习几何和外观特征
考虑相机的位置编码
- 对于每个图像坐标 x i ( I ) x^{(I)}_i xi(I),位置编码从未投影的图像坐标 d k , i = R k − 1 K k − 1 x i ( I ) d_{k,i} = R^{−1}_k K^{−1}_k x^{(I)}_i dk,i=Rk−1Kk−1xi(I) 开始。未投影的图像坐标 d k , i d_{k,i} dk,i 描述了从摄像机 k 的起始点 t k t_k tk 到深度为 1 的图像平面的方向向量。方向向量使用世界坐标
- 使用一个多层感知器(在所有k视图上共享)将这个方向向量 d k , i d_{k,i} dk,i 编码为一个D维的位置嵌入 δ k , i ∈ R D δ_{k,i}∈\mathbb{R}^D δk,i∈RD 。将该位置嵌入与图像特征 ϕ k , i \phi _{k,i} ϕk,i 相结合,作为我们跨视图注意力机制的键
地图视图的潜在嵌入
- 在一个单独的位置嵌入中对两者进行编码。使用MLP将每个相机位置tk转换为一个嵌入 τ k ∈ R D τ_k ∈ \mathbb{R}^D τk∈RD
- 从一个学习到的位置编码 c ( 0 ) ∈ R w × h × D c^{(0)} ∈ \mathbb{R}^{w×h×D} c(0)∈Rw×h×D 开始。地图视图位置编码的目标是产生每个道路元素的3D位置的估计
- 最初,这个估计在所有场景中是共享的,并且可能学习到了每个场景元素在地面平面上的平均位置和高度
- 然后,变换器架构通过多轮计算对这个估计进行细化,得到新的潜在嵌入 c ( 1 ) 、 c ( 2 ) c^{(1)}、c^{(2)} c(1)、c(2) 等
- 每个位置嵌入都能更好地将地图视图坐标投影到三维环境的代理中
- 将地图视图嵌入 c 和相机位置嵌入 τ k τ_k τk 之间的差异用作变换器中的查询
跨视图注意力
-
跨视图变换器通过跨视图注意力机制结合了位置编码。允许每个地图视图坐标关注一个或多个图像位置,但并非每个地图视图位置在每个视图中都有对应的图像块
-
允许注意机制在每个摄像头和每个摄像头内的位置之间进行选择
- 首先将所有视图的相机感知位置嵌入 δ 1 , δ 2 , δ_1, δ_2, δ1,δ2, . . .合并为单个键向量 δ = [ δ 1 , δ 2 , . . . ] δ = [δ_1,δ_2, . . .] δ=[δ1,δ2,...]
- 同时,我们将所有图像特征 ϕ 1 , ϕ 2 , \phi_1,\phi_2, ϕ1,ϕ2, . . .合并为单个值向量 ϕ = [ ϕ 1 , ϕ 2 , . . . ] \phi = [\phi_1,\phi_2, . . .] ϕ=[ϕ1,ϕ2,...],将相机感知位置嵌入 δ δ δ 和图像特征 ϕ \phi ϕ 相结合以计算注意力键
- 最后,我们在键 [ δ , ϕ ] [δ,\phi] [δ,ϕ]、值 ϕ \phi ϕ 和地图视图查询 c − τ k c − τ_k c−τk 之间执行 softmax 交叉注意力
-
softmax 注意力使用键和查询之间的余弦相似度
s i m ( δ k , i , ϕ k , i , c j ( n ) , τ k ) = ( δ k , i + ϕ k , i ) ⋅ ( c j ( n ) − τ k ) ∥ δ k , i + ϕ k , i ∥∥ c j ( n ) − τ k ∥ (3) sim(δ_{k,i}, \phi_{k,i}, c^{(n)}_j , τ_k) = \frac{(δ_{k,i} + \phi_{k,i})\cdot(c^{(n)}_j − τ_k)} {∥δ_{k,i} + \phi_{k,i}∥∥c^{(n)}_j − τ_k∥} \tag{3} sim(δk,i,ϕk,i,cj(n),τk)=∥δk,i+ϕk,i∥∥cj(n)−τk∥(δk,i+ϕk,i)⋅(cj(n)−τk)(3)
3.2 A cross-view transformer architecture
- 网络的第一阶段为每个输入图像建立相机视图表示
- 将每个图像 I i I_i Ii 输入特征提取器,并获得多分辨率补丁嵌入 ϕ 1 1 , ϕ 1 2 , . . . , ϕ n R {\phi_1^1, \phi^2_1,..., \phi_n^R} ϕ11,ϕ12,...,ϕnR,其中 R 是我们考虑的分辨率数量(实验中 R=2)
- 单独处理每个决议。从最低分辨率开始,并使用跨视图注意将所有图像特征投影到地图视图中
- 然后,细化地图视图嵌入并重复该过程以获得更高分辨率
- 最后,我们使用三个上卷积层来产生全分辨率输出
4. Implementation Details
架构
- 使用(并微调)预训练的 EfficientNet-B4 来计算两个不同尺度的图像特征 —— (28, 60) 和 (14, 30),分别对应于 8 倍和 16 倍的缩小
- 初始地图视图位置嵌入是学习参数 w × h × D 的张量,其中 D = 128。为了计算效率,选择 w = h = 25,因为交叉注意力函数随网格大小呈二次方增长
- 编码器由两个交叉注意力块组成:一个用于每个尺度的块特征
- 使用具有4个头和嵌入尺寸 d h e a d = 64 d_{head} = 64 dhead=64 的多头注意力
- 解码器由三个(双线性上采样 + 卷积)层组成,将潜在表示上采样到最终输出尺寸
5. Results
数据集
利用 nuScenes 数据集,数据集是一个包含1000个不同场景的集合,这些场景在各种天气、时间和交通条件下采集
评估
对于地图视图车辆分割,有两种常用的评估设置
- 设置1在车辆周围使用一个100m×50m的区域,并以25cm的分辨率对地图进行取样
- 设置2在车辆周围使用一个100m×100m的区域,并以50cm的取样分辨率
使用模型预测和地图视角标签之间的交并比(IoU)分数作为主要性能指标
5.1 Comparison to prior work
- 将模型与在线地图上五种最具竞争力的现有方法进行比较
- 与金字塔占用网络(PON)、正交特征变换(OFT)、视图解析网络(VPN)、时空聚合(STA)、Lift-Splat-Shoot 和火热 FIERY 比较
- 在这两种设置中,我们的交叉视图转换器和 FIERY 都明显优于所有替代方法
5.2 Ablations of cross-view attention
-
方法的核心要素是跨视图注意机制。它将相机感知嵌入和图像特征结合起来作为键,并将学习到的地图视图位置嵌入作为查询
-
地图视图嵌入允许在多次迭代中更新,而相机感知嵌入包含一些几何信息

-
系统最重要的组成部分是相机感知的位置嵌入。它赋予注意力机制推理场景几何布局的能力。如果没有它,注意力就必须依靠图像特征来揭示自己的位置
-
仅图像特征很难正确连接地图视图和摄像机视图视角。它还需要明确推断每个图像所面向的方向,以消除不同视图的歧义
-
另一方面,仅靠纯粹的几何相机感知位置嵌入也是不够的。该网络可能使用语义和几何线索来对齐地图视图和相机视图,特别是在地图视图嵌入的细化之后
-
使用单个固定地图视图嵌入也会降低模型的性能。最终模型在其所有注意力组件下表现最佳
5.3 Camera-aware positional embeddings
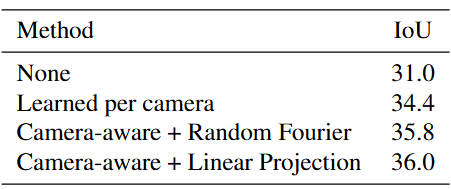
- 不使用任何位置嵌入的效果很差。注意机制难以定位特征并识别摄像头
- 个摄像头学习的嵌入效果出人意料地好。这可能是因为摄像机校准基本保持静态,而学习到的嵌入则将所有几何信息整合在一起
- 使用线性或随机傅立叶投影的相机感知嵌入效果最好
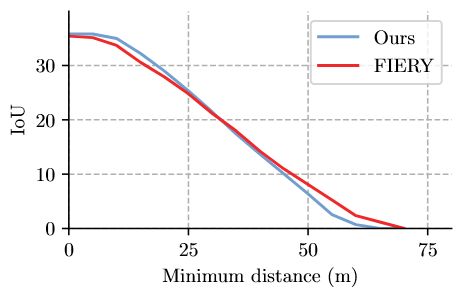
5.4 Accuracy vs distance

5.5 Robustness to sensor dropout
-
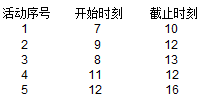
采用在所有六个输入上训练的模型,通过在验证集中对每个样本随机删除 m 个摄像头来评估交并比(IoU)指标
-
性能随着删除的摄像头数量的线性下降。这是相当直观的,因为不同的摄像头仅有轻微的重叠
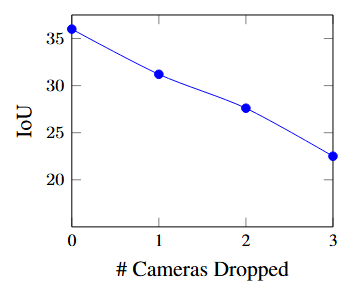
-
值得注意的是,基于Transformer的模型通常对摄像头丢失具有相当强的鲁棒性,整体性能不会下降到场景的未观察区域以外
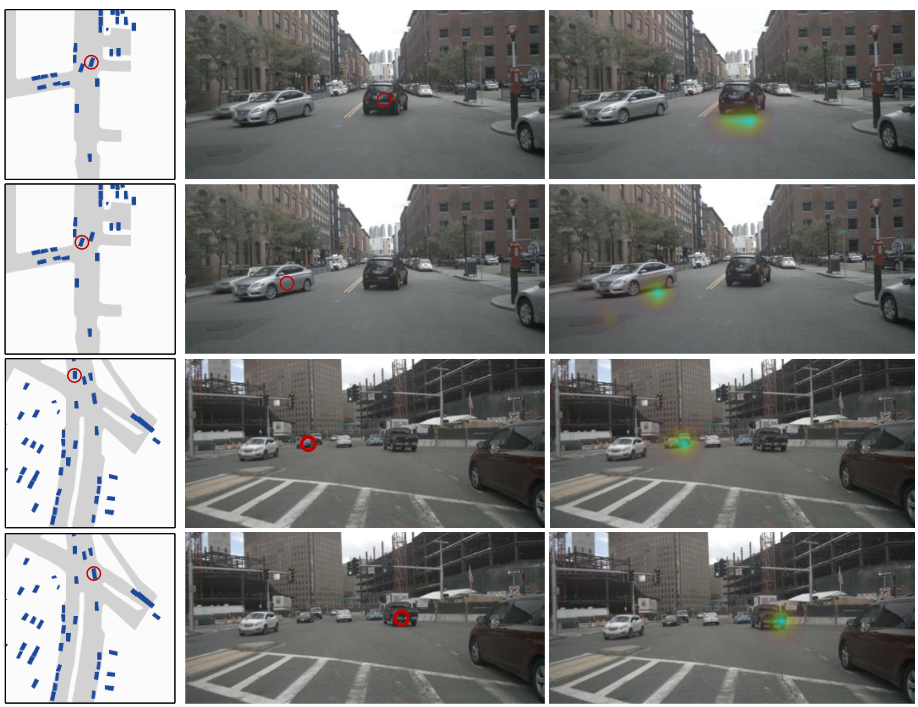
5.6 Qualitative Results
- 对于每一行,我们展示了六个输入摄像机视图以及预测的地图视图分割和地面真实分割
- 提出的方法可以准确地分割附近的车辆,但对于远处或遮挡的车辆无法感知良好
5.7 Geometric reasoning in cross-view attention
-
可视化了地图视角中几个点的图像视角注意力。每个点对应车辆的一个部分。根据定性证据,注意机制可以突出显示相互对应的地图视角和摄像头视角位置
6. Conclusion
- 提出了一种基于跨视图变换器架构的地图视图分割方法,该方法建立在考虑相机位置的位置嵌入之上。所提出的方法实现了最先进的性能,易于实施,并且实时运行
相关文章:
Cross-View Transformers for Real-Time Map-View Semantic Segmentation 论文阅读
论文链接 Cross-View Transformers for Real-Time Map-View Semantic Segmentation 0. Abstract 提出了 Cross-View Transformers ,一种基于注意力的高效模型,用于来自多个摄像机的地图视图语义分割使用相机感知的跨视图注意机制隐式学习从单个相机视…...

MySQL InnoDB 引擎底层解析(一)
6. InnoDB 引擎底层解析 MySQL 对于我们来说还是一个黑盒,我们只负责使用客户端发送请求并等待服务器返回结果,表中的数据到底存到了哪里?以什么格式存放的?MySQL 是以什么方式来访问的这些数据?这些问题我们统统不知…...
redis安装(Windows和linux)
如何实现Redis安装与使用的详细教程 Redis 简介 Redis是一个使用C语言编写的开源、高性能、非关系型的键值对存储数据库。它支持多种数据结构,包括字符串、列表、集合、有序集合、哈希表等。Redis的内存操作能力极强,其读写性能非常优秀,且…...
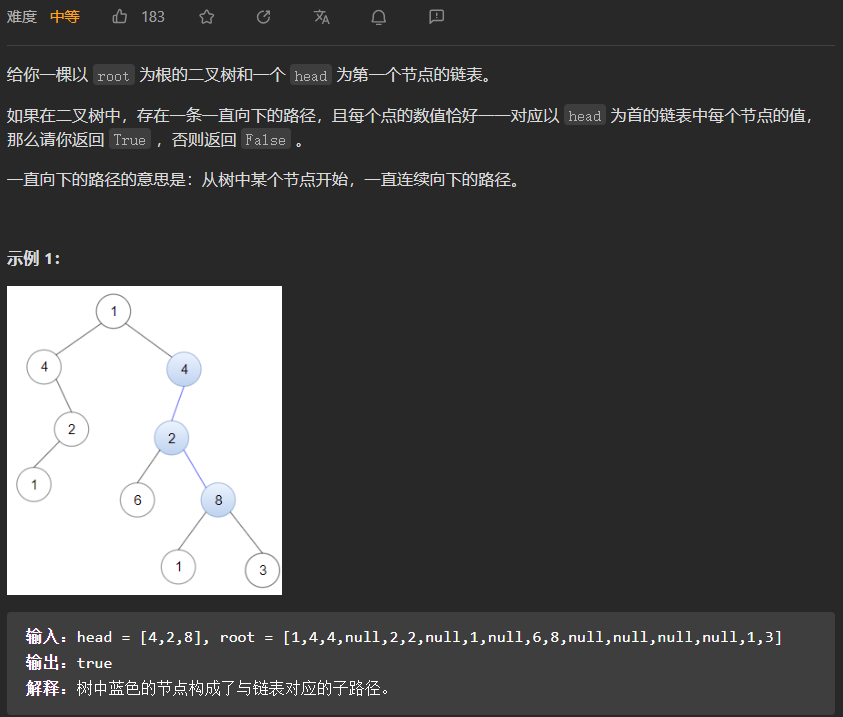
【LeetCode刷题-树】--1367.二叉树中的链表
1367.二叉树中的链表 方法:枚举 枚举二叉树中的每个节点为起点往下的路径是否与链表相匹配的路径,为了判断是否匹配设计了一个递归函数dfs(root,head),其中root表示当前匹配到的二叉树节点,head表示当前匹配到的链表节点,整个函数…...

【嵌入式 – GD32开发实战指南(ARM版本)】第2部分 外设篇 - 第3章 温度传感器DS18B20
1 理论分析 1.1 DS18B20概述 DS18B20 是 DALLAS 最新单线数字温度传感器,新的"一线器件"体积更小、适用电压更宽、更经济。Dallas 半导体公司的数字化温度传感器 DS1820 是世界上第一片支持 "一线总线"接口的温度传感器。 DS18B20采用的单总线协议,也…...

基于spring gateway 的静态资源缓存实现
由于子项目比较多,子项目都是通过嵌套的方式实现的。就会导致子页面加载比较慢,影响客户体验 实现思路(AI搜的--!): 1、通过spring boot缓存实现静态资源缓存 2、在gateway过滤器,对静态资源进行缓存 直接上代码&a…...

SDUT OJ《算法分析与设计》搜索算法
A - 子集和问题 Description 子集和问题的一个实例为〈S,t〉。其中,S{ x1 , x2 ,…,xn }是一个正整数的集合,c是一个正整数。子集和问题判定是否存在S的一个子集S1,使得: 。 试设计一个解子…...
【NI-DAQmx入门】校准
1.设备定期校准的理由 随着时间的推移电子器件的特性会发生自然漂移,可能会导致测量结果的不准确性。防止出现良品和差品筛选出错的情况满足行业国际标准降低设备出现故障的风险使测量结果更具备参考性 2.查找NI设备的校准间隔。 定期校准会使DAQ设备的精度保持在…...

C语言链表
head.h typedef struct Node_s{int data; //数据域struct Node_s *pNext; //指针域 } Node_t, *pNode_t;void headInsert(pNode_t *ppHead, pNode_t *ppTail, int data); void print(pNode_t pHead); void tailInsert(pNode_t *ppHead, pNode_t *ppTail, int data); void sort…...
LabVIEW进行MQTT通信及数据解析
需求:一般通过串口的方式进行数据的解析,但有时候硬件的限制,没法预留串口,那么如何通过网络的方式特别是MQTT数据的通信及解析 解决方式: 1.MQTT通信控件: 参考开源的mqtt-LabVIEW https://github.com…...

基于DOTween插件实现金币飞行到指定位置功能
文章目录 前言一、DOTween是什么?二、使用步骤1.导入DOTween插件在Unity官方插件商店找到DOTween插件导入DOTween插件启用DOTween插件 2.代码逻辑金币飞行代码控制飞行效果代码 3.物体配置1.物体上装配CoinEffect脚本2.在金币预制体上装配FlyControl脚本 三、效果展…...

python-opencv 培训课程作业
python-opencv 培训课程作业 作业一: 第一步:读取 res 下面的 flower.jpg,读取彩图,并用 opencv 展示 第二步:彩图 -> 灰度图 第三步:反转图像:最大图像灰度值减去原图像,即可得…...

【Go入门】并发
【Go入门】并发 有人把Go比作21世纪的C语言,第一是因为Go语言设计简单,第二,21世纪最重要的就是并行程序设计,而Go从语言层面就支持了并行。 goroutine goroutine是Go并行设计的核心。goroutine说到底其实就是协程,…...
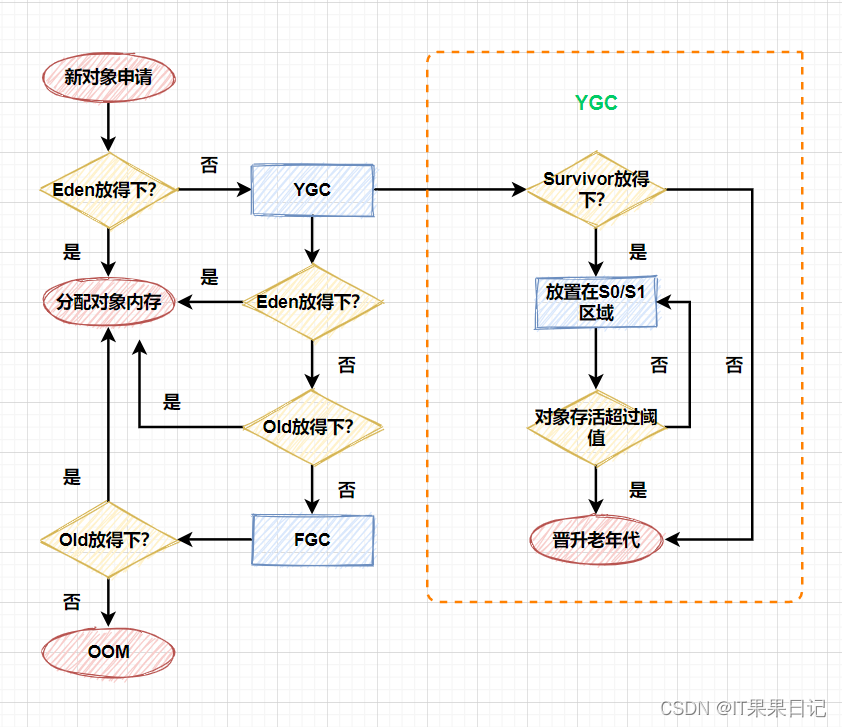
Java虚拟机运行时数据区结构详解
Java虚拟机运行时数据区结构如图所示 程序计数器 程序计数器(Program Counter Register)是一块较小的内存空间,它可以看作是当前线程所执行的字节码的行号指示器。 多线程切换时,为了能恢复到正确的执行位置,每条线程…...
)
华为OD机试 - 转盘寿司(Java JS Python C)
目录 题目描述 输入描述 输出描述 用例 题目解析 JS算法源码 Java算法源码...

【ATTCK】MITRE Caldera-emu插件
CALDERA是一个由python语言编写的红蓝对抗工具(攻击模拟工具)。它是MITRE公司发起的一个研究项目,该工具的攻击流程是建立在ATT&CK攻击行为模型和知识库之上的,能够较真实地APT攻击行为模式。 通过CALDERA工具,安全…...
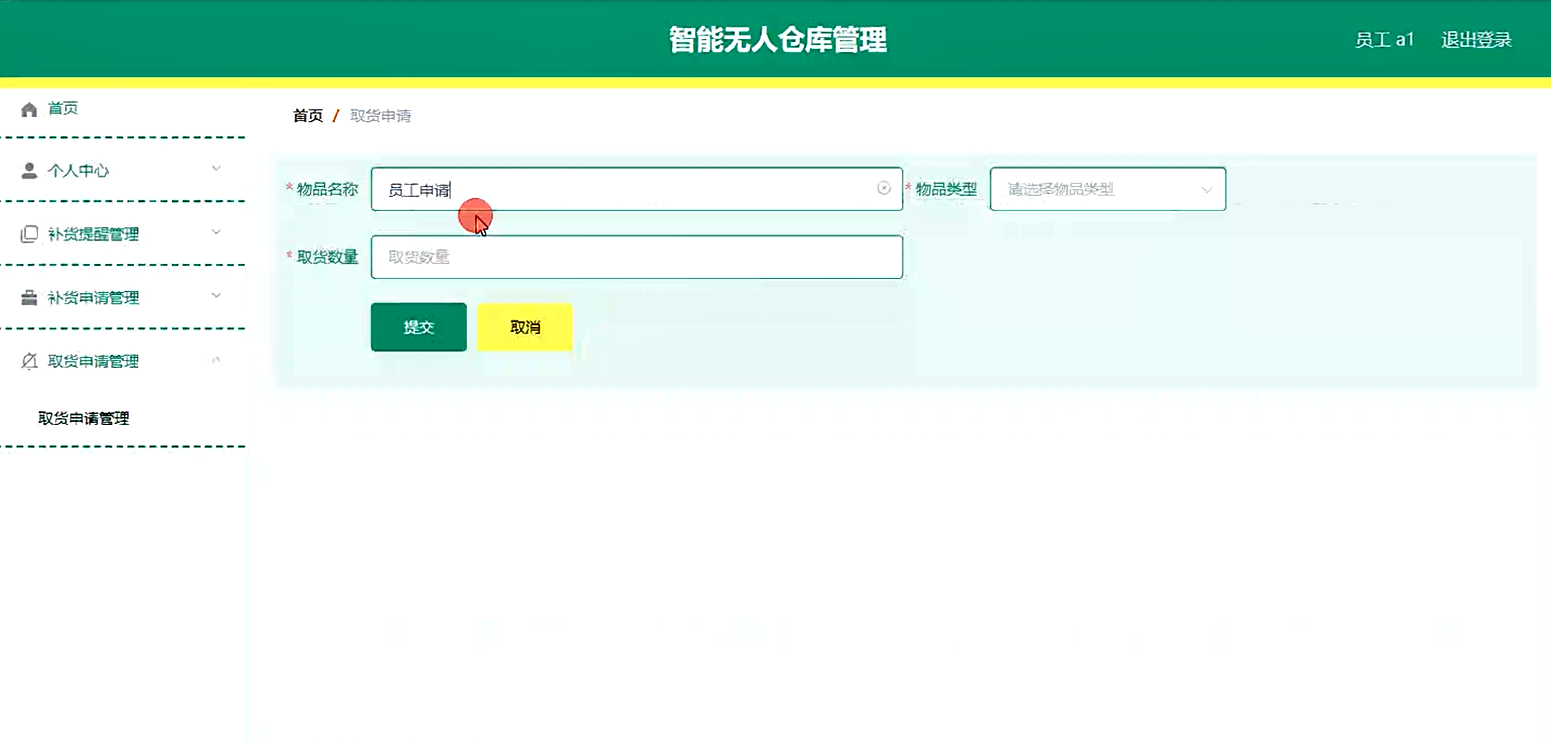
23111709[含文档+PPT+源码等]计算机毕业设计基于Spring Boot智能无人仓库管理-进销存储
文章目录 **软件开发环境及开发工具:****功能介绍:****论文截图:****数据库:****实现:****代码片段:** 编程技术交流、源码分享、模板分享、网课教程 🐧裙:776871563 软件开发环境及…...
SDUT OJ《算法分析与设计》贪心算法
A - 汽车加油问题 Description 一辆汽车加满油后可行驶n公里。旅途中有若干个加油站。设计一个有效算法,指出应在哪些加油站停靠加油,使沿途加油次数最少。并证明算法能产生一个最优解。 对于给定的n和k个加油站位置,计算最少加油次数。 I…...
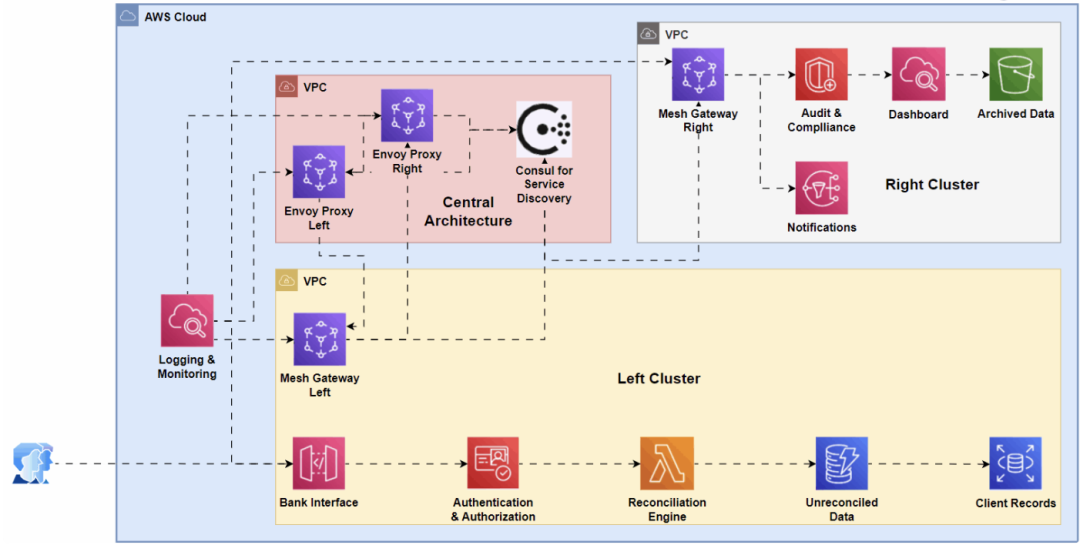
金融业务系统: Service Mesh用于安全微服务集成
随着云计算的不断演进,微服务架构变得日益复杂。为了有效地管理这种复杂性,人们开始采用服务网格。在本文中,我们将解释什么是Service Mesh,为什么它对现代云架构至关重要,以及它是如何解决开发人员今天面临的一些最紧…...

Linux下快速确定目标服务器支持哪些协议和密码套件
实现原理是利用TLS协议的特点和握手过程来进行测试和解析响应来确定目标服务器支持哪些TLS协议和密码套件。 在TLS握手过程中,客户端和服务器会协商并使用相同的TLS协议版本和密码套件来进行通信。通过发送特定的握手请求并分析响应,可以确定目标服务器…...
(Google drive存储解密密钥,加密聊天记录还是存储在Meta服务器上)聊天加密)
Messenger端到端加密机制(end-to-end encryption)(Google drive存储解密密钥,加密聊天记录还是存储在Meta服务器上)聊天加密
Messenger有个save key in google drive选项,这是什么,是指把聊天记录存于google drive吗?还是只存一个key?只存一个key有啥用啊? 文章目录解释为什么只存 key 就够了?如果没有这个 key 会怎样?…...

Driver Store Explorer完全指南:Windows驱动管理的终极解决方案
Driver Store Explorer完全指南:Windows驱动管理的终极解决方案 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer Driver Store Explorer(简称RAPR)是一…...

你的音乐不该被格式绑架:用QMCDecode一键解锁QQ音乐加密文件
你的音乐不该被格式绑架:用QMCDecode一键解锁QQ音乐加密文件 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,…...

openpilot终极指南:如何为你的爱车免费升级自动驾驶辅助系统
openpilot终极指南:如何为你的爱车免费升级自动驾驶辅助系统 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_T…...

BFloat16与SME2指令集在AI加速中的应用
1. BFloat16浮点格式解析BFloat16(Brain Floating Point 16)是专为机器学习设计的16位浮点格式,它在保持与32位单精度浮点(FP32)相同指数位宽(8位)的同时,将尾数位从23位缩减到7位。…...

从零开始手搓一个xv6内核页表:跟着6.S081源码一步步理解walk和mappages函数
从零构建xv6内核页表:深入解析walk与mappages的RISC-V实现在操作系统的核心机制中,虚拟内存管理始终是最具挑战性的部分之一。当我们打开MIT 6.S081课程的实验手册,面对"实现一个简化版页表"的任务时,许多学习者会陷入理…...
搞定RPG游戏中的等级成长与回复效果)
UE5 GAS实战:用一张曲线表格(Curve Table)搞定RPG游戏中的等级成长与回复效果
UE5 GAS实战:用曲线表格构建动态RPG成长系统在角色扮演游戏的开发中,数值成长系统往往是最考验设计功底的环节之一。想象一下,当玩家从1级升到10级的过程中,如果每次升级带来的属性提升都是固定数值,这种线性增长很快就…...

为什么选择Vueify?探索Vue单文件组件的Browserify终极解决方案 [特殊字符]
为什么选择Vueify?探索Vue单文件组件的Browserify终极解决方案 🚀 【免费下载链接】vueify Browserify transform for single-file Vue components 项目地址: https://gitcode.com/gh_mirrors/vu/vueify 在前端开发的世界中,Vue.js以其…...

JEECG-Boot企业级接口防重与并发控制:双引擎保障系统稳定性的实战指南
JEECG-Boot企业级接口防重与并发控制:双引擎保障系统稳定性的实战指南 【免费下载链接】jeecg-boot AI 低代码平台,「低代码 零代码」双模式驱动:低代码一键生成前后端代码,零代码 5 分钟搭建系统,AI Skills 一句话画…...

Unity InputField组件保姆级配置指南:从登录框到聊天框,一次搞定所有输入场景
Unity InputField组件实战配置指南:从登录验证到聊天系统的深度优化在游戏开发中,用户输入交互是连接玩家与游戏世界的重要桥梁。Unity的InputField组件作为最常用的输入控件之一,其配置灵活性直接影响用户体验的流畅度。本文将深入探讨如何针…...