11 月 11 日 ROS 学习笔记——ROS 架构及概念
文章目录
- 前言
- 一、 ROS 文件系统级
- 1). 工作空间 Ws
- 2). 功能包
- 3). 消息 msg
- 4). 服务 srv
- 二、计算图级
- 1). 动态加载节点 nodelet
- 2). 主题 topic
- 3). 服务 srv
- 4). 消息 msg
- 5). 试用练习
- 5). 创建工作空间
- 6). 创建 ROS 功能包和元功能包
- 7). 编译ROS功能包
- 8). 使用 ROS 节点
- 9). 使用主题与节点交互 rostopic
- 10). 使用服务 rosservice
- 11). 使用参数服务器 rosparam
- 12). 创建节点
- 13). 编译节点
- 14). 创建 msg 和 srv 文件
- 15). 使用 srv 和 msg 文件
- 16). launch
- 17). 动态参数
前言
本文为 11 月 11 日 ROS 学习笔记——ROS 架构及概念,分为 ROS 文件系统级和计算图级两节。
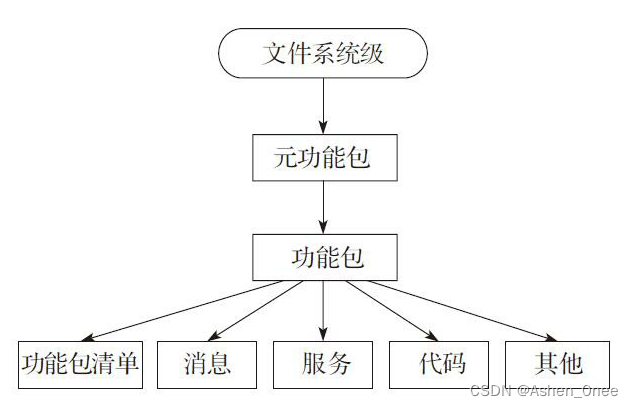
一、 ROS 文件系统级
- 功能包 package:用于创建ROS程序的最小结构和最少内容,包含ROS运行进程(节点)、配置文件等,
- 功能包清单 package.xml:提供关于功能包、 许可证、依赖关系、编译标志等的信息,
- 元功能包 Metapackage: 几个具有某些功能的包组织在一起,
- 元功能包清单:
- 消息类型 msg type: 进程发送到其他进程的信息,
- 服务类型 srv type: 为 ROS 中由每个进程提供的服务定义请求和响应数据结构。
1). 工作空间 Ws
工作空间就是一个文件夹,包含功能包,功能包又包含源文件和环境或工作空间,提供编译这些功能包的一种方式.
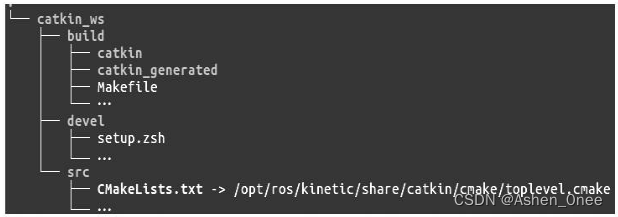
- 源文件空间 src:放置功能包、项目、复制的包等。最重要的一个文件是 CMakeLists.txt,
- 编译空间 build:为功能包和项目保存缓存信息、配置和其他中间文件。
- 开发空间 devel:用来保存编译后的程序,无须安装就能用来测试的程序。
2). 功能包
功能包是一种特定结构的文件和文件夹组合,结构如下:
- include/package_name/:包含需要的库的头文件,
- msg/: 存放非标准信息,
- scripts/: 存放Bash、Python或任何其他脚本语言的可执行脚本,
- src/: 存储程序源文件,
- srv/: 服务类型,
- package.xml: 功能包清单文件。
package.xml 必须在每个功能包中,用来说明此包相关的各类信息,包括包的名称、依赖关系等信息。两个典型标记 <build_depend> 和 <run_depend>:
- <build_depend>: 显示当前功能包安装之前必须先安装哪些功能包
- <run_depend>: 显示运行功能包中代码所需要的包.
3). 消息 msg
消息类型必须具有:字段 field 和常量 constant,如:
- int32 id
- float32 vel
- string name
4). 服务 srv
用以实现节点之间的请求/响应通信。
二、计算图级
ROS 创建一个连接到所有进程的网络。在系统中的任何节点都可以访问此网络,并通过该网络与其他节点交互,获取其他节点发送的信息,并将自身数据发布到网络上。
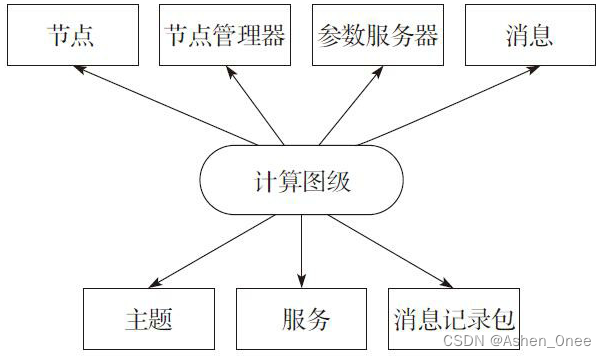
- 节点 node:计算执行进程,与其他节点进行交互。最好让众多节点都具有单一的功能,而不是在系统中创建一个包罗万象的大节点。
- 节点管理器 master:用于节点的名称注册和查找等,也设置节点间的通信。如果在整个ROS中没有节点管理器,就无法与节点、服务、消息等通信。
- 参数服务器: parameter server: 通过参数,就能够在运行时配置节点或改变节点的工作任务。
- 消息 message: 节点通过消息完成彼此的沟通。消息包含一个节点发送到其他节点的信息数据。
- 主题 topic:每个消息都必须有一个名称以便被 ROS 网络分发。节点可以通过订阅某个主题,接收来自其他节点的消息。一个节点可以订阅一个主题,而不需要任何其他节点同时发布该主题。
- 服务 service:服务能够允许我们直接与某个节点进行交互。
- 消息记录包 bag:用于保存和回放ROS消息 数据的文件格式。
1). 动态加载节点 nodelet
内部可通信的多个节点,可以在单个进程中运行多个节点,每个nodelet为一个线程。可以在不使用 ROS 网络的情况下与其他节点通信,节点通信效率更高。 nodelet 对于摄像头和3D传感器这类数据传输量非常大的设备特别有用。
2). 主题 topic
节点间用来传输数据的总线。通过主题进行消息传输不需要节点之间直接连接,发布者和订阅者之间不需要知道彼此是否存在。一个主题可以有多个订阅者,也可以有多个发布者。每个主题都是强类型的,发布到主题上的消息必须与主题的 ROS 消息类型相匹配,并且节点只能接收类型匹配的消息:
- TCP/IP:基于 TCP 传输称为 TCPROS,使用 TCP/IP 长连接,是ROS默认的传输方式;
- UDP:UDPROS,是一种低延迟高效率的传输方式, 但可能产生数据丢失,最适合远程操控之类的任务。
3). 服务 srv
当需要直接与节点通信并以 RPC 方式获得应答时,将无法通过主题实现,而需要使用服务。服务需要由用户开发,节点并不提供标准服务。包含消息源代码的 文件存储在 srv 文件夹中。
服务类型是包名和 .srv 文件名的组合。例如 chapter2_tutorials/srv/chapter2_srv1.srv 文件的服务类型是 chapter2_tutorials/chapter2_srv1
4). 消息 msg
一个节点通过向特定主题发布消息,将信息发送到另一个节点。消息的类型在遵循以下标准命名方式:包名/文件名.msg, 例 如,std_msgs/msg/String.msg 的消息类型是 std_msgs/String
5). 试用练习
- 查找 turtlesim 包的路径
rospack find turtlesim
>>> /opt/ros/noetic/share/turtlesim
- 查找在系统中安装过的某个元功能包
rosstack find ros_comm
>>> /opt/ros/noetic/share/ros_comm
- 获得功能包或功能包集下面的文件列表
rosls turtlesim/
>>> cmake images msg package.xml srv
- 更改当前工作目录
roscd turtlesim/
pwd
>>> /opt/ros/noetic/share/turtlesim
5). 创建工作空间
- 查看 ROS 正在使用的工作空间
echo $ROS_PACKAGE_PATH
>>> /home/li/Documents/Demo01_Ws/src:/opt/ros/noetic/share
- 新建此文件夹
mkdir -p ~/dev/catkin_ws/src
cd ~/dev/catkin_ws/src/
catkin_init_workspace
- 编译工作空间
cd ~/dev/catkin_ws/
catkin_make
- 完成配置
source devel/setup.bash
6). 创建 ROS 功能包和元功能包
cd ~/dev/catkin_ws/src/
catkin_create_pkg chapter2_tut std_msgs roscpp
7). 编译ROS功能包
cd ~/dev/catkin_ws/
catkin_make
8). 使用 ROS 节点
- 启动一个新的节点
rosrun turtlesim turtlesim_node
- 查看用于程序调试的信息
rosnode info /turtlesim
9). 使用主题与节点交互 rostopic
- 使用箭头键移动海龟
rosrun turtlesim turtle_teleop_key
- 使用以下命令行查看主题清单
rostopic list
>>> /rosout/rosout_agg/turtle1/cmd_vel/turtle1/color_sensor/turtle1/pose
- 运行以下命令行并使用箭头键查看消息产生时发送了哪些数据
rostopic echo /turtle1/cmd_vel
>>> linear: x: 2.0y: 0.0z: 0.0angular: x: 0.0y: 0.0z: 0.0
---
- 使用以下命令行查看由主题发送的消息类型
rostopic type /turtle1/cmd_vel
>>> geometry_msgs/Twist
- 使用以下命令查看消息字段
rosmsg show geometry_msgs/Twist
>>> geometry_msgs/Vector3 linearfloat64 xfloat64 yfloat64 zgeometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 z
- 直接发布主题使海龟做圆周运动
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:x: 1.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 1.0" 10). 使用服务 rosservice
服务是能够使节点之间相互通信的另一种方法。服务允许节点发送请求和接收响应
- 列出活动服务
rosservice list
>>> /clear/kill/reset/rosout/get_loggers/rosout/set_logger_level/spawn/turtle1/set_pen/turtle1/teleport_absolute/turtle1/teleport_relative/turtlesim/get_loggers/turtlesim/set_logger_level
- 查看某个服务的类型
rosservice type /clear
>>> std_srvs/Empty
- 调用服务
rosservice call /clear
- 以不同的方向在另一个位置创建另一只海龟
rosservice type /spawn | rossrv show // 查看该服务的类型
>>> float32 xfloat32 yfloat32 thetastring name---string namerosservice call /spawn 3 3 0.2 "new_turtle" // 调用服务
11). 使用参数服务器 rosparam
参数服务器用于存储所有节点均可访问的数据。ROS中用来管理参数服务器的工具称为 rosparam.
- 查看所有节点使用的服务器参数
rosparam list
>>> /rosdistro/roslaunch/uris/host_li_alienware__41685/rosversion/run_id/turtlesim/background_b/turtlesim/background_g/turtlesim/background_r
- 读取参数的某个值
rosparam get /turtlesim/background_b
>>> 255
- 设定一个新的值
rosparam set /turtlesim/background_b 100
- 使用
dump参数保存或加载参数服务器的内容
rosparam dump save.yaml
- 使用
load向参数服务器加载新的数据文件
rosparam load load.yaml namespace
12). 创建节点
创建两个节点:一个发布数据,另一个接收数据.
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>/*发布方
*/int main(int argc, char **argv)
{// 初始化节点ros::init(argc, argv, "example_a");// 进程的处理程序,它允许我们与环境交互ros::NodeHandle n;// 将节点实例化成发布者,将发布的主题和类型的名称告知节点管理器ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message", 1000);// 设置发送数据的频率ros::Rate loop_rate(10);while (ros::ok()) {// 创建消息变量std_msgs::String msg;std::stringstream ss;ss << "I am the example_a_node";msg.data = ss.str();// 继续发布消息chatter_pub.publish(msg);// spinOnce 在主循环中执行一次迭代允许用户执行操作ros::spinOnce();// 将程序挂起loop_rate.sleep();}return 0;
}
#include "ros/ros.h"
#include "std_msgs/String.h"/*订阅方
*/// 回调函数
// 每次节点收到一条消息时,调用该函数处理数据
void chatterCallback(const std_msgs::String::ConstPtr& msg) {ROS_INFO("I heard: [%s]", msg->data.c_str());}int main(int argc, char **argv)
{ros::init(argc, argv, "example_b");ros::NodeHandle n;// 创建一个订阅者,并从主题获取以message为名称的消息数据ros::Subscriber sub = n.subscribe("message", 1000,chatterCallback);// 运行到这里时调用 chatterCallback 回调函数ros::spin();return 0;
}
13). 编译节点
- 修改 CMakeLists.txt
add_executable(example1_a src/example1_a.cpp)
add_executable(example1_b src/example1_b.cpp)add_dependencies(example1_a ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(example1_b ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(example1_a${catkin_LIBRARIES}
)
target_link_libraries(example1_b${catkin_LIBRARIES}
)
- 启动 roscore,并在不同的命令行窗口下分别运行两个节点
roscore
rosrun demo01_pub_cli example1_a
rosrun demo01_pub_cli example1_b>>> [ INFO] [1700051508.077304984]: I heard: [I am the example_a_node][ INFO] [1700051508.177173843]: I heard: [I am the example_a_node][ INFO] [1700051508.277239966]: I heard: [I am the example_a_node]...
- 使用
rosnode和rostopic命令来调试和查看当前节点的运行状况
rosnode info /example_b
>> Node [/example_b]Publications: * /rosout [rosgraph_msgs/Log]Subscriptions: * /message [std_msgs/String]Services: * /example_b/get_loggers* /example_b/set_logger_level
rostopic info /message
>>> Type: std_msgs/StringPublishers: * /example_aSubscribers: * /example_b
rostopic type /message
>>> std_msgs/String
rostopic bw /message
>>> subscribed to [/message]average: 296.19B/smean: 27.00B min: 27.00B max: 27.00B window: 10
14). 创建 msg 和 srv 文件
- 首先创建一个新的 .msg 文件,添加:
int32 A
int32 B
int32 C
- 编辑 package.xml ,取消注释:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
- 编辑 CMakeList.txt,并编译
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generation
)generate_messages(DEPENDENCIESstd_msgs
)# Generate messages in the 'msg' folder
add_message_files(FILESchapter2_msg1.msg
)# Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESstd_msgs
)
- 检查编译是否成功,如果看到与 .msg 文件中看到一样的内容,说明编译正确
rosmsg show demo01_pub_cli/chapter2_msg1
>>> int32 Aint32 Bint32 C
- 创建一个新的 .srv 文件:
int32 A
int32 B
int32 C
---
int32 sum
- 编辑 package.xml ,取消注释:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
- 编辑 CMakeList.txt,并编译
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo01_pub_cliCATKIN_DEPENDS message_runtime
# DEPENDS system_lib
)# Generate messages in the 'msg' folder
add_message_files(FILESchapter2_msg1.msg
)# Generate services in the 'srv' folder
add_service_files(FILESchapter2_srv1.srv
)# Generate added messages and services with any dependencies listed here
generate_messages(DEPENDENCIESstd_msgs
)
- 检查编译是否成功,如果看到与 .msg 文件中看到一样的内容,说明编译正确
rossrv show demo01_pub_cli/chapter2_srv1
>>> int32 Aint32 Bint32 C---int32 sum
15). 使用 srv 和 msg 文件
该服务将对三个整数求和,需要两个节点:一个 服务器 和一个 客户端 。
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_srv1.h"/*服务端
*/// 回调函数
bool add(demo01_pub_cli::chapter2_srv1::Request &req,demo01_pub_cli::chapter2_srv1::Response &res) {res.sum = req.A + req.B + req.C;ROS_INFO("request: A=%d, B=%d, C=%d", (int)req.A, (int)req.B,(int)req.C);ROS_INFO("sending back response: [%d]", (int)res.sum);return true;}int main(int argc, char **argv)
{ros::init(argc, argv, "add_3_ints_server");ros::NodeHandle n;// 创建服务并在 ROS 中发布广播ros::ServiceServer service = n.advertiseService("add_3_ints", add);ROS_INFO("Ready to add 3 ints.");ros::spin();return 0;
}
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_srv1.h"
#include <cstdlib>/*客户端
*/int main(int argc, char **argv)
{ros::init(argc, argv, "add_3_ints_client");if (argc != 4) {ROS_INFO("usage: add_3_ints_client A B C");return 1;}ros::NodeHandle n;// 创建客户端,名为 add_3_intsros::ServiceClient client = n.serviceClient<demo01_pub_cli::chapter2_srv1>("add_3_ints");// 创建 srv 请求类型的实例// 加入需要发送的数据值demo01_pub_cli::chapter2_srv1 srv;srv.request.A = atoll(argv[1]);srv.request.B = atoll(argv[2]);srv.request.C = atoll(argv[3]);// 调用服务并发送数据if (client.call(srv)) {ROS_INFO("Sum: %ld", (long int)srv.response.sum);} else {ROS_ERROR("Failed to call service add_3_ints");return 1;}return 0;
}
- 编译 CMakeList.txt
add_executable(example2_a src/example2_a.cpp)
add_executable(example2_b src/example2_b.cpp)add_dependencies(example2_a ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(example2_b ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(example2_a${catkin_LIBRARIES}
)
target_link_libraries(example2_b${catkin_LIBRARIES}
)
- 启动节点
rosrun demo01_pub_cli example2_a
>>> [ INFO] [1700059229.228592862]: Ready to add 3 ints.[ INFO] [1700059253.580802115]: request: A=1, B=2, C=3[ INFO] [1700059253.580825139]: sending back response: [6]
rosrun demo01_pub_cli example2_b 1 2 3
>>> [ INFO] [1700059253.580914856]: Sum: 6
- 创建发布和订阅节点
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_msg1.h"
#include <sstream>int main(int argc, char **argv)
{ros::init(argc, argv, "example3_a");ros::NodeHandle n;ros::Publisher pub = n.advertise<demo01_pub_cli::chapter2_msg1>("message", 1000);ros::Rate loop_rate(10);while (ros::ok()) {demo01_pub_cli::chapter2_msg1 msg;msg.A = 1;msg.B = 2;msg.C = 3;pub.publish(msg);ros::spinOnce();loop_rate.sleep();}return 0;
}
#include "ros/ros.h"
#include "demo01_pub_cli/chapter2_msg1.h"void messageCallback(const demo01_pub_cli::chapter2_msg1::ConstPtr& msg) {ROS_INFO("I heard: [%d] [%d] [%d]", msg->A, msg->B, msg->C);}int main(int argc, char **argv)
{ros::init(argc, argv, "example3_b");ros::NodeHandle n;ros::Subscriber sub = n.subscribe("message", 1000, messageCallback);ros::spin();return 0;
}
- 编译 CMakeList.txt
add_executable(example3_a src/example3_a.cpp)
add_executable(example3_b src/example3_b.cpp)add_dependencies(example3_a ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(example3_b ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})target_link_libraries(example3_a${catkin_LIBRARIES}
)
target_link_libraries(example3_b${catkin_LIBRARIES}
)
- 启动节点
rosrun demo01_pub_cli example3_a
rosrun demo01_pub_cli example3_b
>>> [ INFO] [1700061493.409080424]: I heard: [1] [2] [3][ INFO] [1700061493.509095136]: I heard: [1] [2] [3][ INFO] [1700061493.609056521]: I heard: [1] [2] [3]...
16). launch
用于启动多个节点。 当执行启动文件时,并不需要在 roscore 命令前启动,roslaunch 会启动它。当在 shell中只运行一个节点时,可以看到 ROS_INFO 输出的消息。但是当运行启动文件时,则看不到。
- 创建 .launch 文件
<launch><node name="example1_a" pkg="demo01_pub_cli" type="example1_a" /><node name="example1_b" pkg="demo01_pub_cli" type="example1_b" />
</launch>
- 启动 .launch 文件
roslaunch demo01_pub_cli chapter2.launch
- 查看运行的节点:
rosnode list
>>> /example1_a/example1_b/rosout
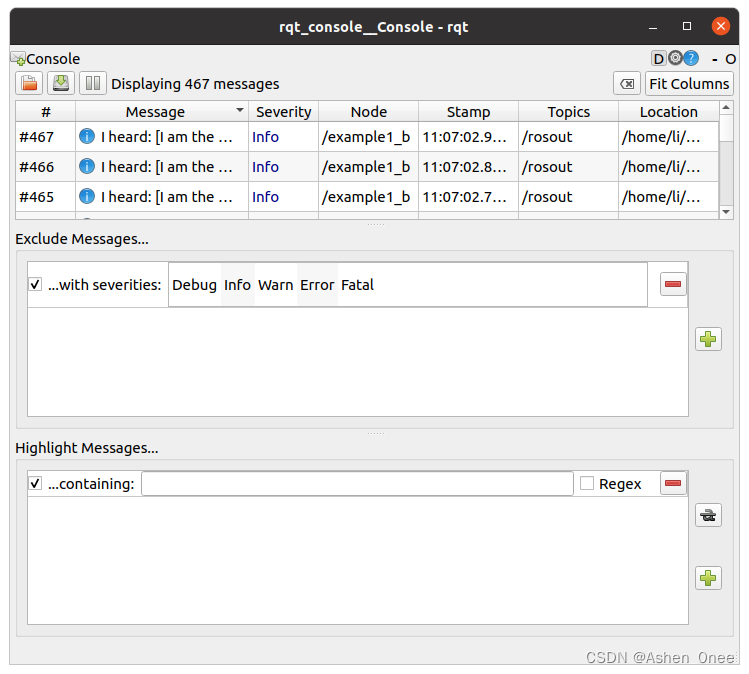
- 运行
rqt_console程序看到信息
rqt_console
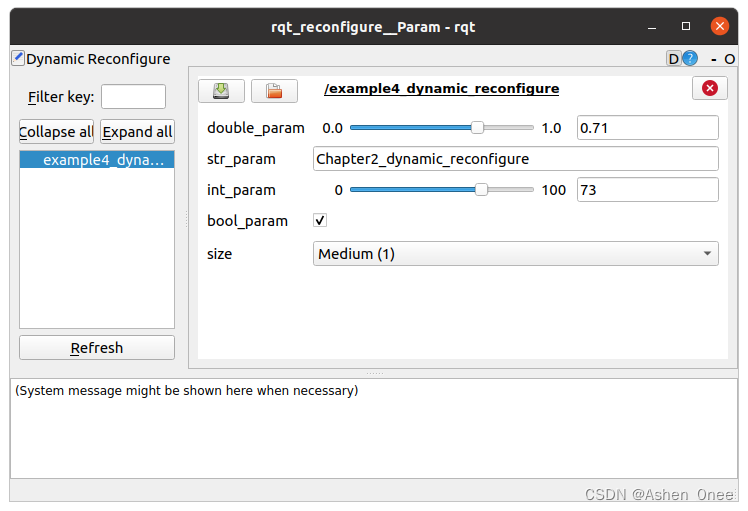
17). 动态参数
配置一个包含动态重配置实用程序功能的基本节点。
- 创建配置文件 .cfg
#! /usr/bin/env python
PACKAGE = "demo01_pub_cli"# 初始化参数生成器
from dynamic_reconfigure.parameter_generator_catkin import *gen = ParameterGenerator()# 加入不同的参数类型并设置默认值、描述、范围等
"""gen.add()- name: 参数的名称- type: 参数值的类型- level: 一个传递给回调的位掩码- description: 描述- default: 节点启动时的默认值- min: 参数最小值- max: 参数最大值
"""
gen.add("double_param", double_t, 0, "A double parameter",.1, 0, 1)
gen.add("str_param", str_t, 0, "A string parameter", "Chapter2_dynamic_reconfigure")
gen.add("int_param", int_t, 0, "An Integer parameter", 1, 0, 100)
gen.add("bool_param", bool_t, 0, "A Boolean parameter", True)size_enum = gen.enum([gen.const("Low", int_t, 0, "Low is 0"),gen.const("Medium", int_t, 1, "Medium is 1"),gen.const("High", int_t, 2, "High is 2")],"Select from the list")gen.add("size", int_t, 0, "Select from the list", 1, 0, 3, edit_method=size_enum)# 生成必要的文件并退出程序
exit(gen.generate(PACKAGE, "demo01_pub_cli", "chapter2_"))
- 修改执行文件的权限
chmod +x *.cfg
- 修改 CMakeList.txt 并编译
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_generationdynamic_reconfigure
)generate_dynamic_reconfigure_options(cfg/chapter2.cfg
)add_dependencies(example4 demo01_pub_cli_gencfg)
- 写具有动态重配置支持的新节点
#include <ros/ros.h>
#include <dynamic_reconfigure/server.h>
#include <demo01_pub_cli/chapter2_Config.h>// 参数访问的方式, 将输出参数的新值
void callback(demo01_pub_cli::chapter2_Config &config, uint32_t level) {ROS_INFO("Reconfigure Request: %d, %f, %s %s %d",config.int_param,config.double_param,config.str_param.c_str(),config.bool_param?"True":"False",config.size);}int main(int argc, char **argv)
{ros::init(argc, argv, "example4_dynamic_reconfigure");// 初始化服务器dynamic_reconfigure::Server<demo01_pub_cli::chapter2_Config> server;dynamic_reconfigure::Server<demo01_pub_cli::chapter2_Config>::CallbackType f;f = boost::bind(&callback, _1, _2);// 向服务器发送callback函数。当服务器得到重新配置请求时调用 callback 函数server.setCallback(f);ros::spin();return 0;
}
- 修改 CMakeLists.txt , 编译并运行节点和动态重配置 GUI
add_executable(example4 src/example4.cpp)
add_dependencies(example4 demo01_pub_cli_gencfg)
rosrun demo01_pub_cli example4
>>> [ INFO] [1700312052.497444818]: Reconfigure Request: 1, 0.100000, Chapter2_dynamic_reconfigure True 1
rosrun rqt_reconfigure rqt_reconfigure
>>> [ INFO] [1700312097.307494990]: Reconfigure Request: 42, 0.100000, Chapter2_dynamic_reconfigure True 1[ INFO] [1700312099.355379827]: Reconfigure Request: 42, 0.470000, Chapter2_dynamic_reconfigure True 1[ INFO] [1700312101.253127436]: Reconfigure Request: 73, 0.470000, Chapter2_dynamic_reconfigure True 1[ INFO] [1700312103.210104907]: Reconfigure Request: 73, 0.710000, Chapter2_dynamic_reconfigure True 1
相关文章:
11 月 11 日 ROS 学习笔记——ROS 架构及概念
文章目录 前言一、 ROS 文件系统级1). 工作空间 Ws2). 功能包3). 消息 msg4). 服务 srv 二、计算图级1). 动态加载节点 nodelet2). 主题 topic3). 服务 srv4). 消息 msg5). 试用练习5). 创建工作空间6). 创建 ROS 功能包和元功能包7). 编译ROS功能包8). 使用 ROS 节点9). 使用主…...

BSN专网项目介绍:宁波市区块链新型基础设施“甬链”
“甬链”是在宁波市委网络安全和信息化委员会办公室、宁波市发展和改革委员会、宁波市经济和信息化局、宁波市大数据发展管理局等政府单位的指导下,由宁波区块链专委会主任单位中国移动宁波分公司,基于区块链服务网络(BSN)的技术和…...

【数据库表及字段统计SQL】【mysql】【clickhouse】【oracle】
最近在一些元数据整理时,需要对数据库进行澄清,奈何数据库没有专门的运维工程师,得自行取相关信息,故最终整理了相关统计语句。 Clickhouse 元数据明细 SELECTt1.database AS 库名,t1.name AS 表名,replaceRegexpAll(toStri…...

如何分析伦敦金的价格走势预测?
伦敦金作为国际黄金市场的重要指标,其价格走势一直备受投资者关注。但是,黄金市场的价格变化受到多种因素的影响,因此要准确预测伦敦金的价格走势并非易事。在本文中,将介绍一些常用的方法和工具,帮助您分析伦敦金的价…...

【设计原则篇】聊聊接口隔离原则
是什么 客户端不应该强迫依赖它不需要的接口,客户端可以理解为接口的调用者或者使用者。接口其实就是一种规范,比如手机都是同样的接口,那么充电器就可以使用。 接口从细的层面来说的话,其实分三种,一组API接口集合、单…...
)
自压缩llm 为 超长记忆之随机编码(非进制编码)
自压缩llm 为 超长记忆之随机编码(非进制编码) 代码代码解析代码 # 自压缩llm 为 超长记忆 # prompt 格式 # <|细颗粒词表|><|粗颗粒词表|><|细颗粒词表|> # 细颗粒词表 = 词1,词2,词3,词4,词5,词6,词7,词8,词9,词10, # 组颗粒词表id1, 组颗…...
苹果怎么互传照片?简单方法总结好了!
随着时间的推移,手机中的照片数量可能会不断增加,从而导致存储空间不足。这时候,将照片传输到另一个手机可以扩大存储容量,使我们的手机更加顺畅运行。那么,苹果怎么互传照片?在拥有两台苹果设备的情况下&a…...
【ARM Trace32(劳特巴赫) 使用介绍 2.1 -- TRACE32 Practice 脚本 cmm 脚本学习】
请阅读【ARM Coresight SoC-400/SoC-600 专栏导读】 上篇文章【ARM Trace32(劳特巴赫) 使用介绍 2 - Veloce 环境中使用trace32 连接 Cortex-M33】 下篇文章【ARM Trace32(劳特巴赫) 使用介绍 2.2 – TRACE32 进阶命令之 DIAG 弹框命令】 文章目录 1. TRACE32 Practice 语法1.…...
学习指南:如何快速上手媒体生态一致体验开发
过去开发者们在使用多媒体能力时,往往会遇到这样的问题,比如:为什么我开发的相机不如系统相机的效果好?为什么我的应用和其他的音乐一起发声了,我要怎么处理?以及我应该怎么做才能在系统的播控中心里可以看…...
037、目标检测-算法速览
之——常用算法速览 目录 之——常用算法速览 杂谈 正文 1.区域卷积神经网络 - R-CNN 2.单发多框检测SSD,single shot detection 3.yolo 杂谈 快速过一下目标检测的各类算法。 正文 1.区域卷积神经网络 - R-CNN region_based CNN,奠基性的工作。…...
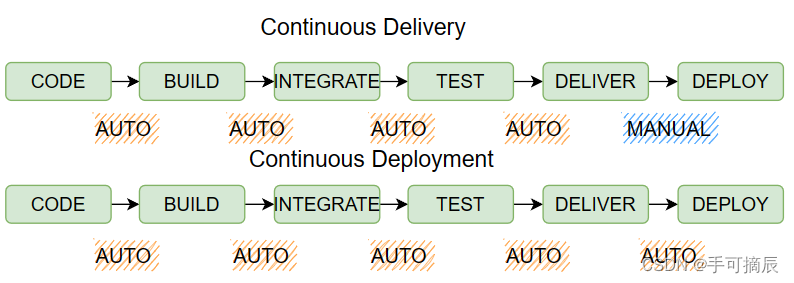
【开发流程】持续集成、持续交付、持续部署
一、开发工作流程 假设把开发流程分为以下几个阶段: 编码 -> 构建 -> 集成 -> 测试 -> 交付 -> 部署 如上图所示,持续集成、持续交付、持续部署有着不同的软件自动交付周期。 二、持续集成、持续交付、持续部署 1、持续集成 持续集成…...

Linux——编译器gcc/g++、调试器gdb以及自动化构建工具makefilemake详解
编译器—gcc/g、调试器—gdb以及自动化构建工具—makefile&&make 文章目录 编译器—gcc/g、调试器—gdb以及自动化构建工具—makefile&&make1. 编译器——gcc/g1.1 生成可执行文件与修改默认可执行文件1.2 程序的翻译过程以及对应的gcc选项1.2.1 预处理 gcc -E…...

Android registerForActivityResults使用详解以及实现原理
registerForActivityResult 使用用途是监听Activity结果。 以下是使用样例 //需要传递Request用于解析Intent和解析上个Activity返回的结果 val launchdata = registerForActivityResult<PickVisualMediaRequest, Uri?>(ActivityResultContracts.PickVisualMedia()) {…...

模拟实现一个Linux中的简单版shell
exec系列接口中的环境变量 在之前我们学习了exec系类函数的功能就是将一个程序替换成另外一个程序。 然后就会出现下面的问题: 首先父进程对应的环境变量的信息是从bash中来的,因为我们自己写的父进程在运行的时候首先就要成为bash的子进程。这里我们将…...
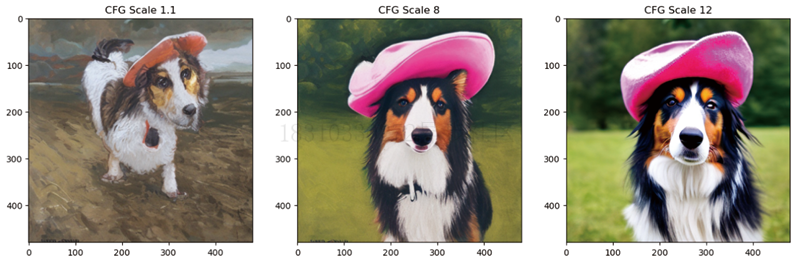
扩散模型实战(十):Stable Diffusion文本条件生成图像大模型
推荐阅读列表: 扩散模型实战(一):基本原理介绍 扩散模型实战(二):扩散模型的发展 扩散模型实战(三):扩散模型的应用 扩散模型实战(四ÿ…...
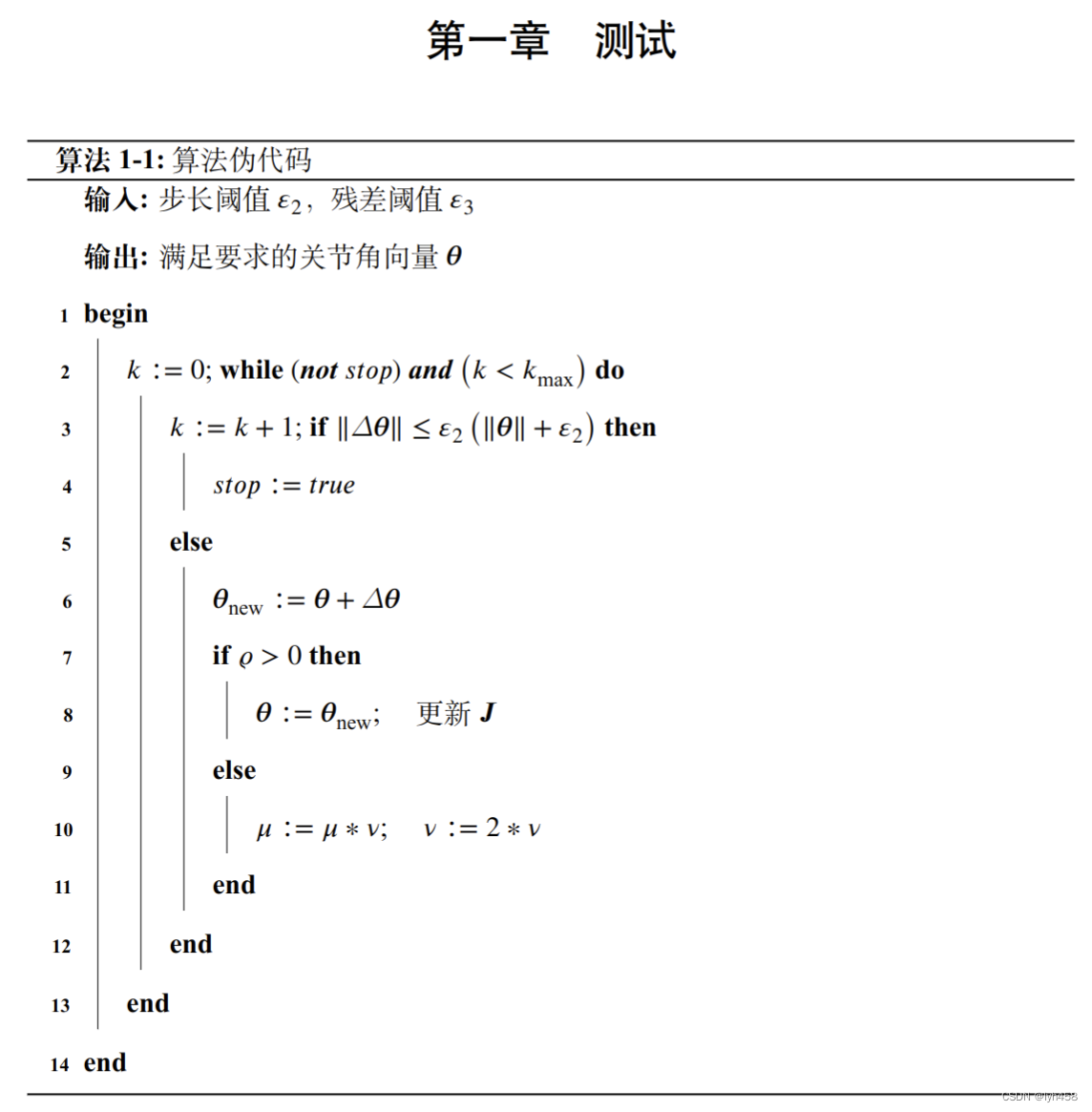
LaTex编写伪代码,并实现根据所在章编号(连字符),例如算法1-1
1 首先导入包: 按需要添加或者删除option,但是algochapter是必须的。 \usepackage[linesnumbered,ruled,algochapter]{algorithm2e}各个option的作用如下: 您好,这是Bing。我可以帮您解释algorithm2e包中这几个option的意思。&a…...

vue.js javascript js判断是值否为空
检查一个对象(Object)是否为空,即不包含任何元素。Javascript 中的对象就是一个字典,其中包含了一系列的键值对(Key Value Pair)。检查一个对象是否为空,等价于检查对象中有没有键值对。 1、如…...

网页开发如何实现简易页面跳动/跳转,html课堂练习/作业,页面ABC的相互跳转
先建一个文件夹,文件夹包含三个文件夹,三个文件夹分别包含各自的代码。(可以只建一个文件夹,文件夹包含各页面代码) 页面1的代码: <head> <meta http-equiv"Content-Type" content"text/html; charsetu…...

某大型房地产公司绩效面谈项目成功案例纪实
——开展有效的绩效面谈,促进和完善管理工作 【客户行业】房地产行业;国有企业 【问题类型】绩效面谈改进 【客户背景】 某大型房地产公司是某国企集团的省级分公司,集团公司现拥有北京、上海、广州、山东等8大区域公司,现有员…...
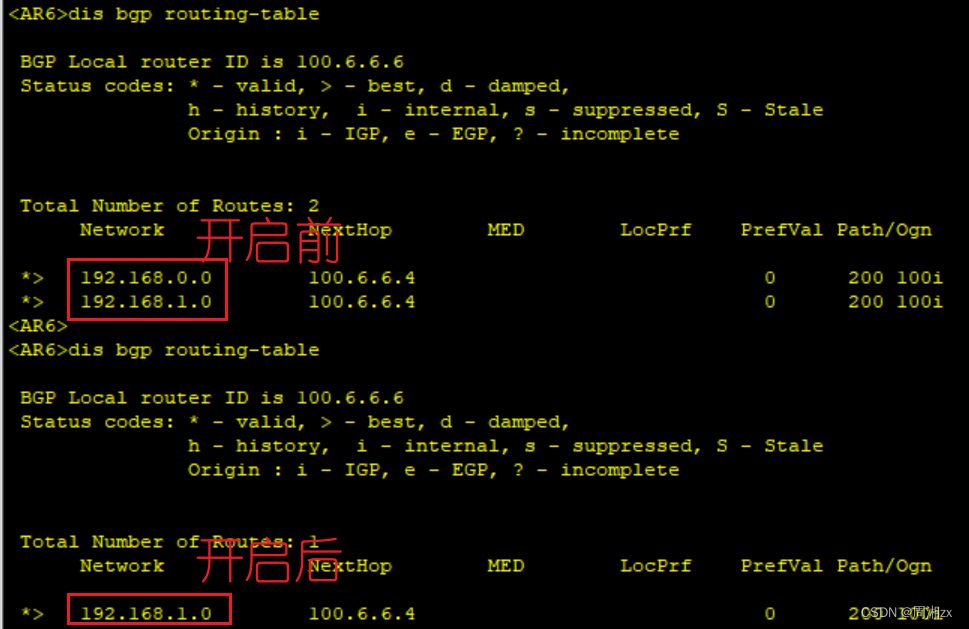
BGP联盟和团体属性实验
目录 一、实验拓扑 二、实验要求 三、实验步骤 1、IP地址配置 2、ospf配置 3、BGP建邻 4、宣告网段 5、配置团体属性 一、实验拓扑 二、实验要求 1、按照图示配 IP 地址,R2,R3,R4,R5分别配 Loopbacke 口地址作为OSPF的Ro…...

用if…elseif…end语句输出成绩等级
Matlab里面的if分支结构语句主要有单分支、双分支和多分支结构语句三种形式,前面两篇博文分别学习了单分支结构语句和双分支结构语句,这篇博文列出三种分支结构语句的特点,并对多分支结构语句进行学习。1、if…end语句if…end语句ÿ…...

企业级MCP Server OAuth授权接入的七层防御实践
1. 这不是又一篇“OAuth流程图”——企业级MCP Server为什么必须自己实现授权接入你有没有遇到过这样的场景:公司新上线的内部运维平台(我们暂且叫它MCP,即Monitoring & Control Platform)需要对接钉钉、飞书或企业微信的组织…...

Gradio模型部署全攻略:从Hugging Face Spaces到AWS EC2实战
1. 项目概述与部署价值当你花了几周甚至几个月时间,终于训练出一个效果不错的机器学习模型,比如一个能识别猫狗图片的分类器,或者一个能生成诗歌的文本模型,接下来的问题往往不是技术上的,而是工程上的:怎么…...

Win11已加密?统信UOS 1060双系统安装后数据盘共享踩坑实录与解决方案
Win11与统信UOS 1060双系统数据共享难题:从加密隔离到无缝互通当Windows 11的BitLocker加密遇上统信UOS的文件系统支持,双系统用户常常陷入一个尴尬境地——明明两块硬盘物理相连,数据却像隔着一道无形的墙。这不是简单的权限问题,…...

使用C#代码重新排列PDF页面的操作代码
引言对于页面顺序混乱的 PDF 文档,重新排列页面可以避免读者产生困惑,同时也能让文档结构更加清晰有序。本文将演示如何使用 Spire.PDF for .NET 以编程方式重新排列现有 PDF 文档中的页面。安装 Spire.PDF for .NET首先,需要将 Spire.PDF fo…...

明星数字人运营失效率高达68%?AI Agent驱动的粉丝交互系统,已帮3家MCN提升留存率217%
更多请点击: https://intelliparadigm.com 第一章:AI Agent娱乐行业应用的现状与挑战 近年来,AI Agent在娱乐行业的渗透持续加速,从智能剧本生成、虚拟偶像实时交互,到个性化内容推荐与跨平台用户行为建模,…...

实际开发中 SQL 与产品的耦合与互动实践
引言 在产品开发初期,数据库 Schema(表结构)的设计是一个绕不开的核心问题。很多开发者,尤其是新手,常常会陷入一个两难境地:“Schema 需要一开始就完全确定好吗?如果后期要改动怎么办?到底要设计多少个表(Schema 数量)才算合适?” 这些问题背后,反映的是对软件工…...

Python自动化登录:破解验证码与Cookie会话维持实战
1. 这不是“绕过验证”,而是理解会话机制的起点很多人看到“跳过验证码登陆”第一反应是:这合规吗?会不会被封?其实这个问题本身就暴露了一个关键误区——我们不是在“绕过”什么,而是在还原真实用户登录时浏览器自动完…...

利用Taotoken CLI工具一键配置多开发环境与团队协作
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken CLI工具一键配置多开发环境与团队协作 在团队开发场景中,一个常见的挑战是如何快速、统一地为不同成员和…...

美国联邦AI资助逻辑:问题驱动型资金如何塑造技术路线
1. 项目概述:这不只是经费数字,而是AI技术路线的投票器“联邦政府对人工智能研究的资金投入现状”——这个标题乍看像一份政策简报的副标题,但在我过去十年跟踪科技政策与AI产业交叉点的过程中,它实际是一把解剖美国创新生态系统的…...