037、目标检测-算法速览
之——常用算法速览
目录
之——常用算法速览
杂谈
正文
1.区域卷积神经网络 - R-CNN
2.单发多框检测SSD,single shot detection
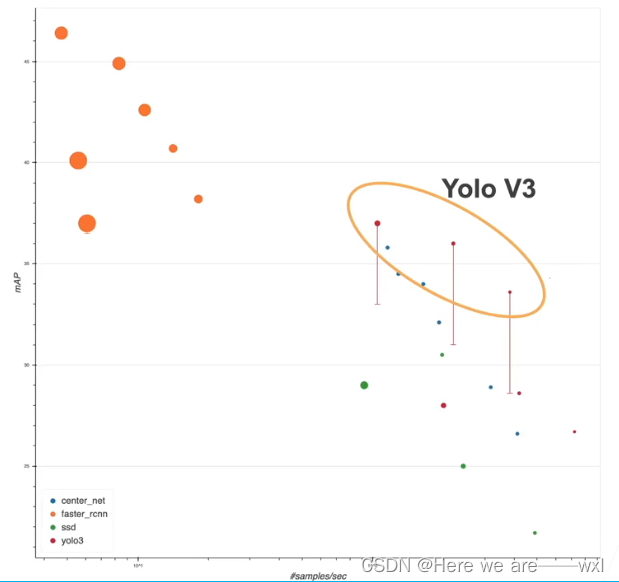
3.yolo
杂谈
快速过一下目标检测的各类算法。
正文
1.区域卷积神经网络 - R-CNN
region_based CNN,奠基性的工作。
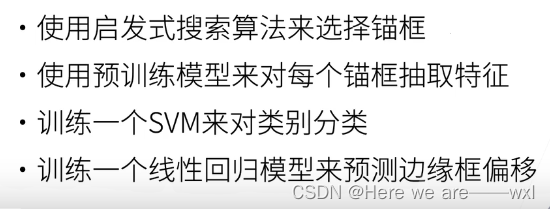
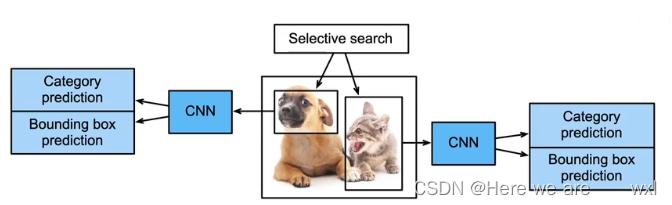
选择锚框是一个较为复杂的算法,来自于神经网络还没发展的时候;启发式算法选择出锚框后,每一个锚框当做一个图片,然后用预训练好的CNN抽取特征;然后训练SVM用来分类,训练一个回归模型来预测边缘框,具体是:
将每个提议区域的特征连同其标注的类别作为一个样本。训练多个支持向量机对目标分类,其中每个支持向量机用来判断样本是否属于某一个类别;
将每个提议区域的特征连同其标注的边界框作为一个样本,训练线性回归模型来预测真实边界框。
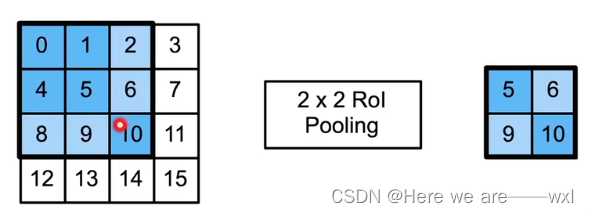
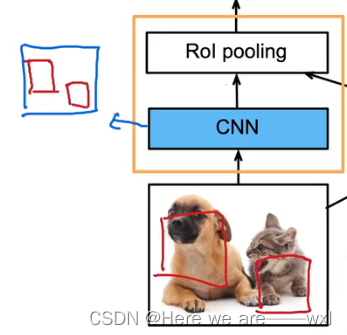
然而锚框的选择大小与比例是不一定的,这种情况下如何生成规则的训练batch呢,于是提出了RoI(region of interest),兴趣区域池化:

这个方法不会严格均匀地切割,而是会尽量按比例切割满足最后输出,看对应颜色:
Fast RCNN:
对于RCNN的加强,主要的改进是直接对整张图片抽特征而不是对锚框抽特征:
R-CNN的主要性能瓶颈在于,对每个提议区域,卷积神经网络的前向传播是独立的,而没有共享计算。 由于这些区域通常有重叠,独立的特征抽取会导致重复的计算。 Fast R-CNN 对R-CNN的主要改进之一,是仅在整张图象上执行卷积神经网络的前向传播。
搜到锚框之后再映射到CNN之后的feature map上:
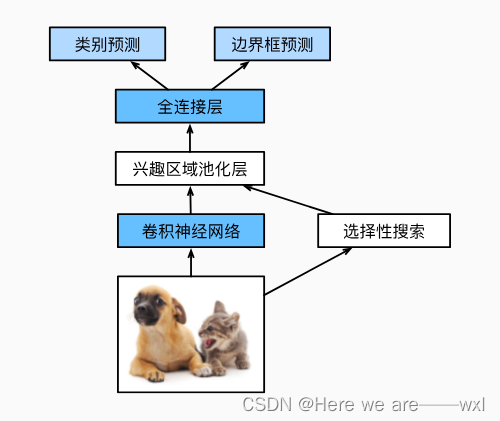
再把特征图上的ROI展平投入到全连接层进行预测。
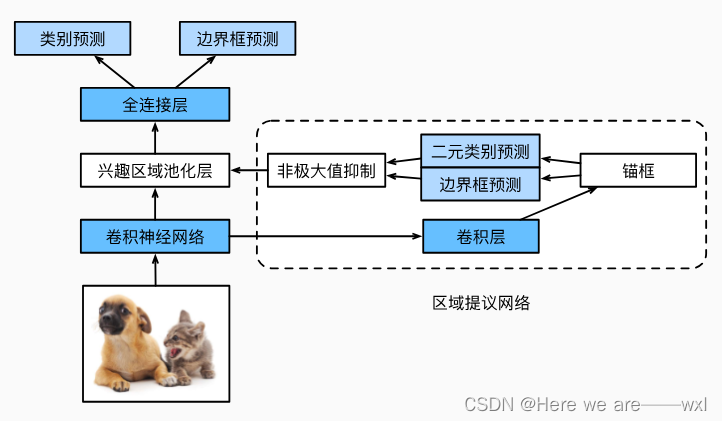
Faster R-CNN:
更进一步的改进是:
为了较精确地检测目标结果,Fast R-CNN模型通常需要在选择性搜索中生成大量的提议区域。 Faster R-CNN 提出将选择性搜索替换为区域提议网络(region proposal network),从而减少提议区域的生成数量,并保证目标检测的精度。
二分类预测锚框合理与不合理:
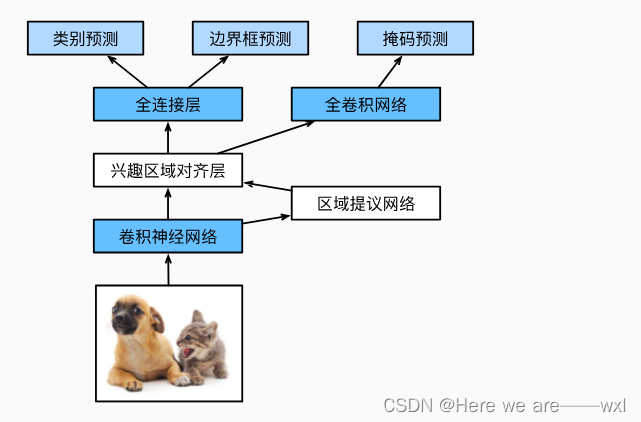
Mask R-CNN:
如果有像素级别的标号就用FCN来处理,提升原有的性能;roi pooling改为了roi align以避免像素级的误差:
比较贵,实用性不高:
2.单发多框检测SSD,single shot detection
单发步枪,只跑一遍,不需要两个网络。
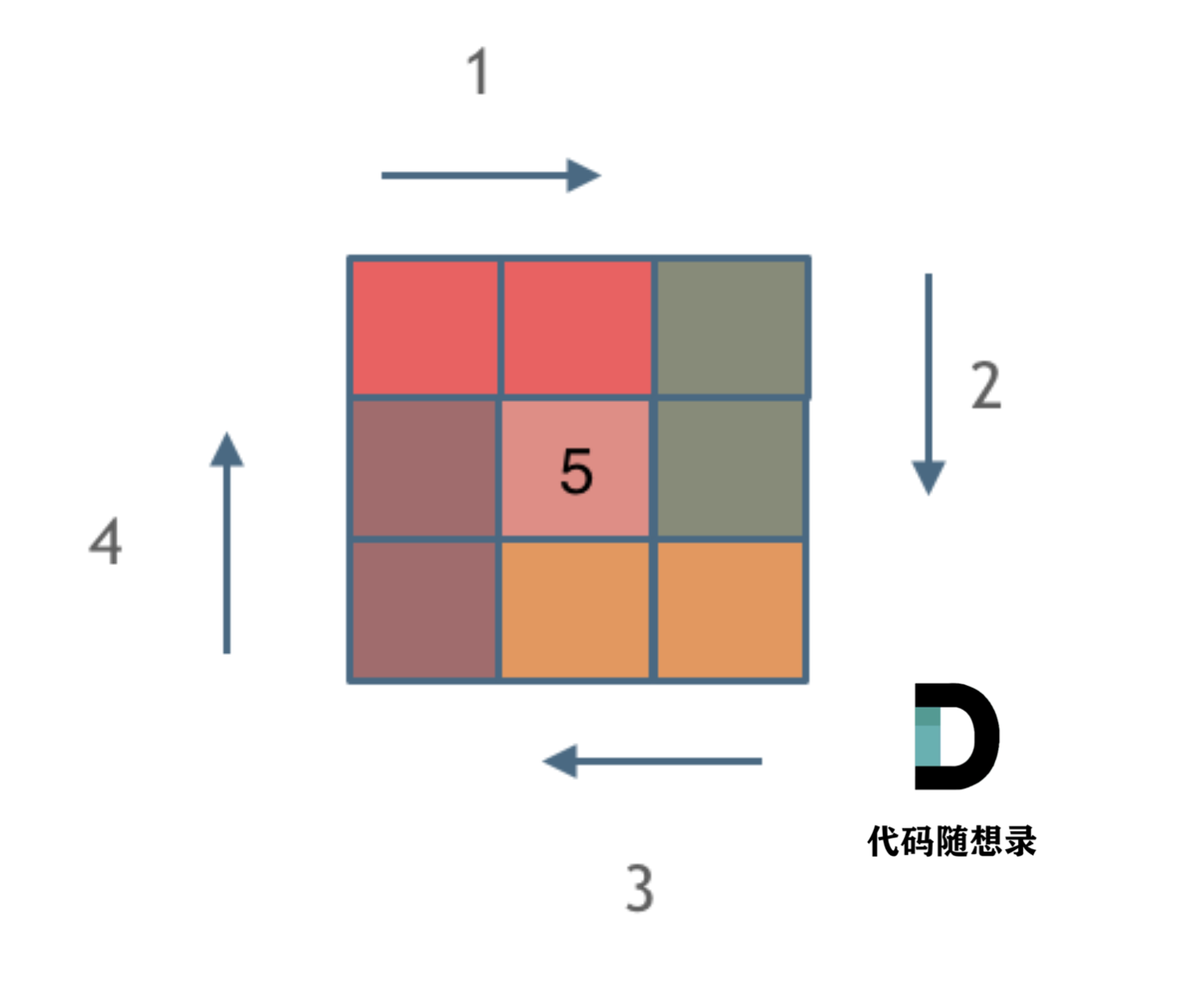
生成锚框的办法:
然后的操作:
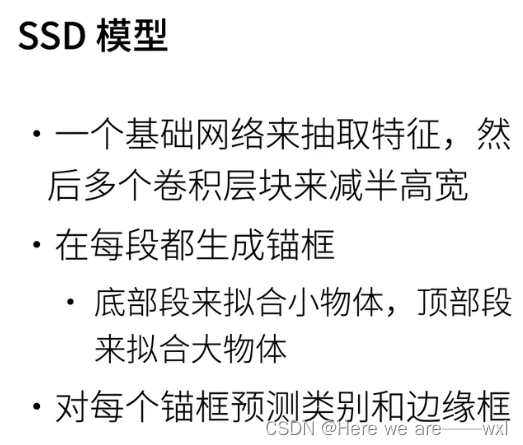
多个分辨率下去锚框然后用算法预测类别和边界框,参考上面RCNN的预测方法。

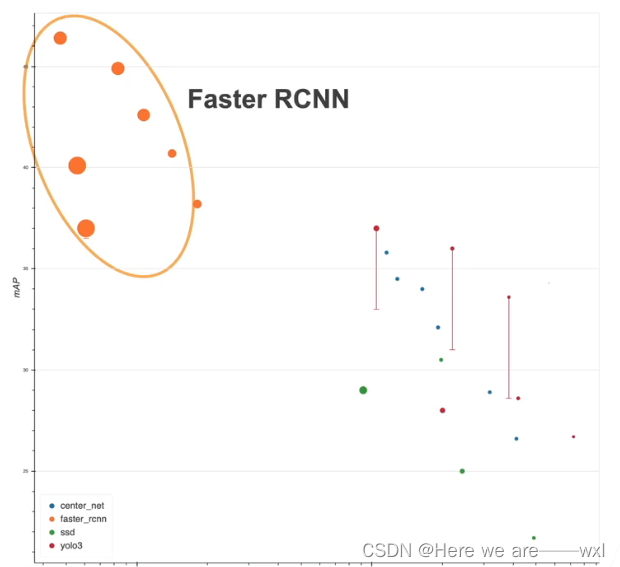
性能,更快但没那么准:
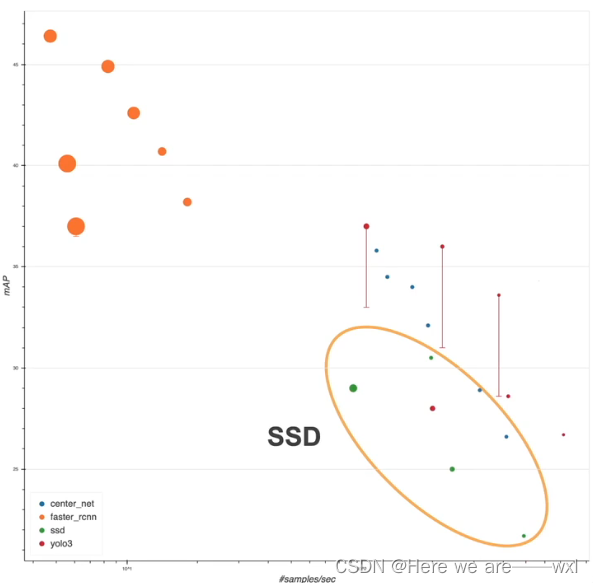
主要原因应该是没有什么改进?
3.yolo
you only live once:
you only look once:
每个锚框预测了多个边缘框,因为这样均匀分割的锚框可能会同时挨到多个真实边缘框。
后续通过细节改进进行提升,比如引入数据集真实框的先验知识之类的。
YOLO(You Only Look Once)是一种流行的实时目标检测系统,可以在图像或视频流中检测多个物体。YOLO的关键思想是将图像分成网格,并为每个网格单元预测边界框和类别概率。这使得YOLO能够在神经网络的单次前向传递中对多个物体进行预测,从而具有高效的计算能力。
YOLO算法的主要步骤包括:
输入图像:
- YOLO接收输入图像并将其划分为网格。
网格划分:
- 将图像划分为一个 S x S 的网格。每个网格单元负责预测对象,如果对象的中心落入该单元,则该单元负责预测该对象。
边界框预测:
- 每个网格单元预测多个边界框,同时预测它们的置信度分数。这些边界框由(x,y,w,h)表示,其中(x,y)是边界框的中心,(w,h)是宽度和高度。
类别预测:
- 每个边界框预测对象的不同类别的概率。
物体置信度分数:
- YOLO为每个边界框预测一个物体置信度分数,表示该框内存在物体的可能性。
非极大值抑制:
- 在进行预测后,会应用一种后处理步骤称为非极大值抑制,以过滤重复或低置信度的预测结果。它保留最有信心的预测结果并删除重叠显著的预测。
输出:
- 最终输出是一个边界框列表,每个边界框关联着一个类别标签和置信度分数。
YOLO已经推出了几个版本,通过提高准确性和速度进行改进。一些知名的版本包括YOLOv1,YOLOv2(YOLO9000),YOLOv3和YOLOv4。每个版本都引入了架构改进,并解决了目标检测中的特定挑战。
值得注意的是,由于其实时处理能力,YOLO被广泛应用于自动驾驶车辆、监控和机器人等各种应用领域。YOLO的实现可在流行的深度学习框架(如TensorFlow和PyTorch)中找到,使其对研究人员和开发人员更易于接触和使用。
相关文章:
037、目标检测-算法速览
之——常用算法速览 目录 之——常用算法速览 杂谈 正文 1.区域卷积神经网络 - R-CNN 2.单发多框检测SSD,single shot detection 3.yolo 杂谈 快速过一下目标检测的各类算法。 正文 1.区域卷积神经网络 - R-CNN region_based CNN,奠基性的工作。…...
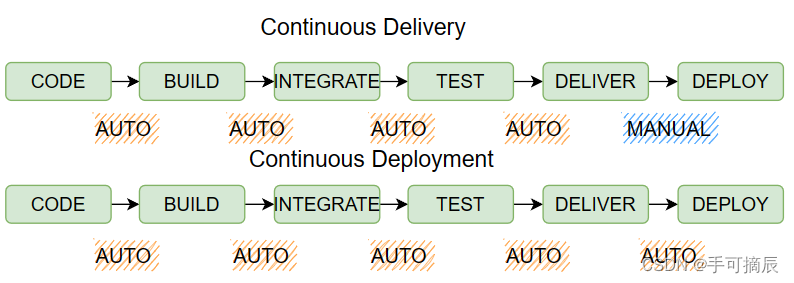
【开发流程】持续集成、持续交付、持续部署
一、开发工作流程 假设把开发流程分为以下几个阶段: 编码 -> 构建 -> 集成 -> 测试 -> 交付 -> 部署 如上图所示,持续集成、持续交付、持续部署有着不同的软件自动交付周期。 二、持续集成、持续交付、持续部署 1、持续集成 持续集成…...

Linux——编译器gcc/g++、调试器gdb以及自动化构建工具makefilemake详解
编译器—gcc/g、调试器—gdb以及自动化构建工具—makefile&&make 文章目录 编译器—gcc/g、调试器—gdb以及自动化构建工具—makefile&&make1. 编译器——gcc/g1.1 生成可执行文件与修改默认可执行文件1.2 程序的翻译过程以及对应的gcc选项1.2.1 预处理 gcc -E…...

Android registerForActivityResults使用详解以及实现原理
registerForActivityResult 使用用途是监听Activity结果。 以下是使用样例 //需要传递Request用于解析Intent和解析上个Activity返回的结果 val launchdata = registerForActivityResult<PickVisualMediaRequest, Uri?>(ActivityResultContracts.PickVisualMedia()) {…...

模拟实现一个Linux中的简单版shell
exec系列接口中的环境变量 在之前我们学习了exec系类函数的功能就是将一个程序替换成另外一个程序。 然后就会出现下面的问题: 首先父进程对应的环境变量的信息是从bash中来的,因为我们自己写的父进程在运行的时候首先就要成为bash的子进程。这里我们将…...
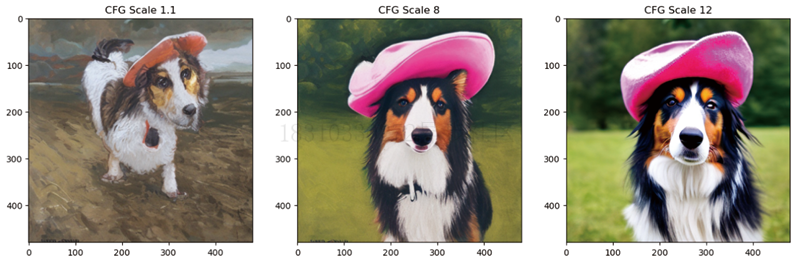
扩散模型实战(十):Stable Diffusion文本条件生成图像大模型
推荐阅读列表: 扩散模型实战(一):基本原理介绍 扩散模型实战(二):扩散模型的发展 扩散模型实战(三):扩散模型的应用 扩散模型实战(四ÿ…...
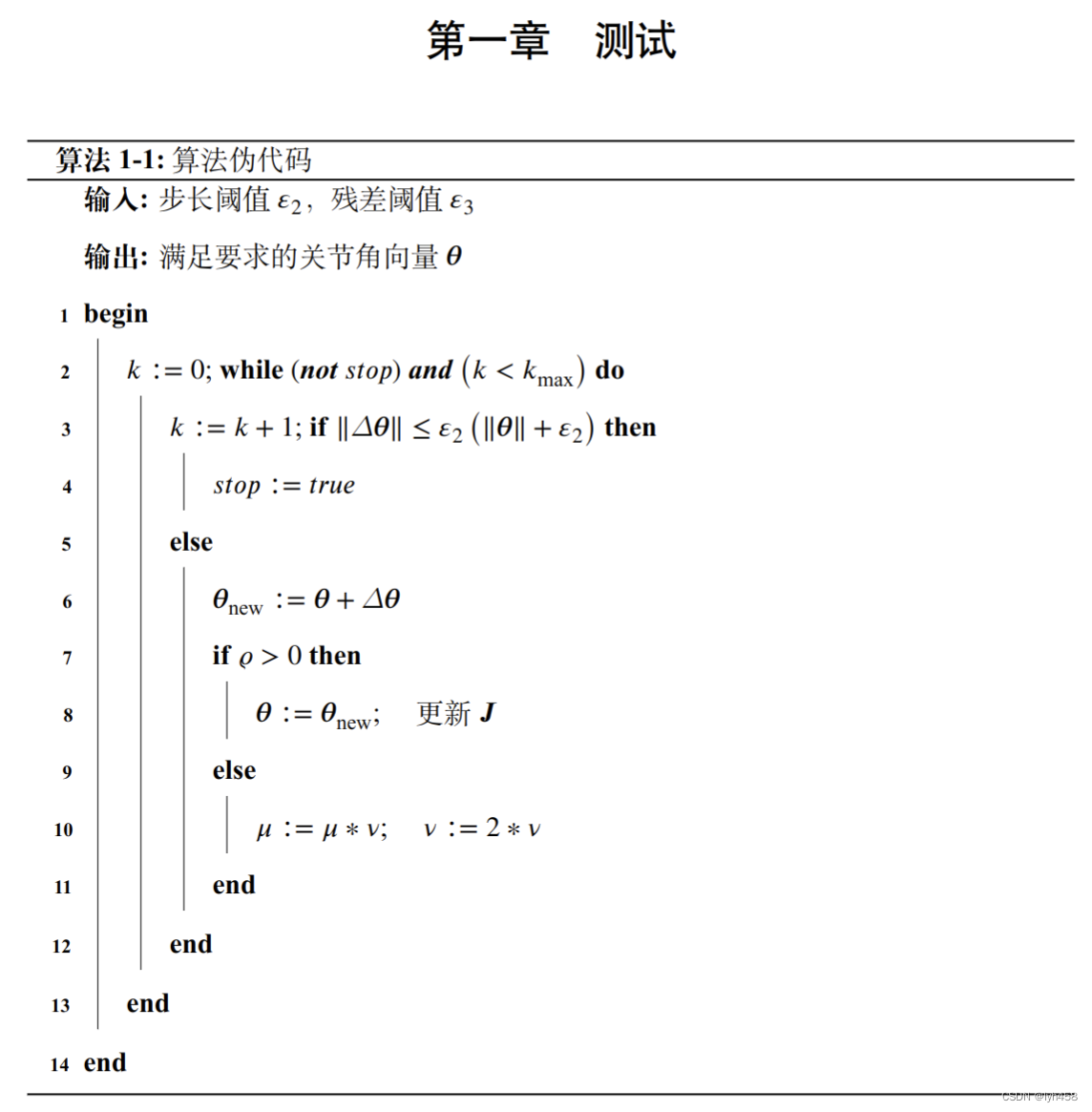
LaTex编写伪代码,并实现根据所在章编号(连字符),例如算法1-1
1 首先导入包: 按需要添加或者删除option,但是algochapter是必须的。 \usepackage[linesnumbered,ruled,algochapter]{algorithm2e}各个option的作用如下: 您好,这是Bing。我可以帮您解释algorithm2e包中这几个option的意思。&a…...

vue.js javascript js判断是值否为空
检查一个对象(Object)是否为空,即不包含任何元素。Javascript 中的对象就是一个字典,其中包含了一系列的键值对(Key Value Pair)。检查一个对象是否为空,等价于检查对象中有没有键值对。 1、如…...

网页开发如何实现简易页面跳动/跳转,html课堂练习/作业,页面ABC的相互跳转
先建一个文件夹,文件夹包含三个文件夹,三个文件夹分别包含各自的代码。(可以只建一个文件夹,文件夹包含各页面代码) 页面1的代码: <head> <meta http-equiv"Content-Type" content"text/html; charsetu…...

某大型房地产公司绩效面谈项目成功案例纪实
——开展有效的绩效面谈,促进和完善管理工作 【客户行业】房地产行业;国有企业 【问题类型】绩效面谈改进 【客户背景】 某大型房地产公司是某国企集团的省级分公司,集团公司现拥有北京、上海、广州、山东等8大区域公司,现有员…...
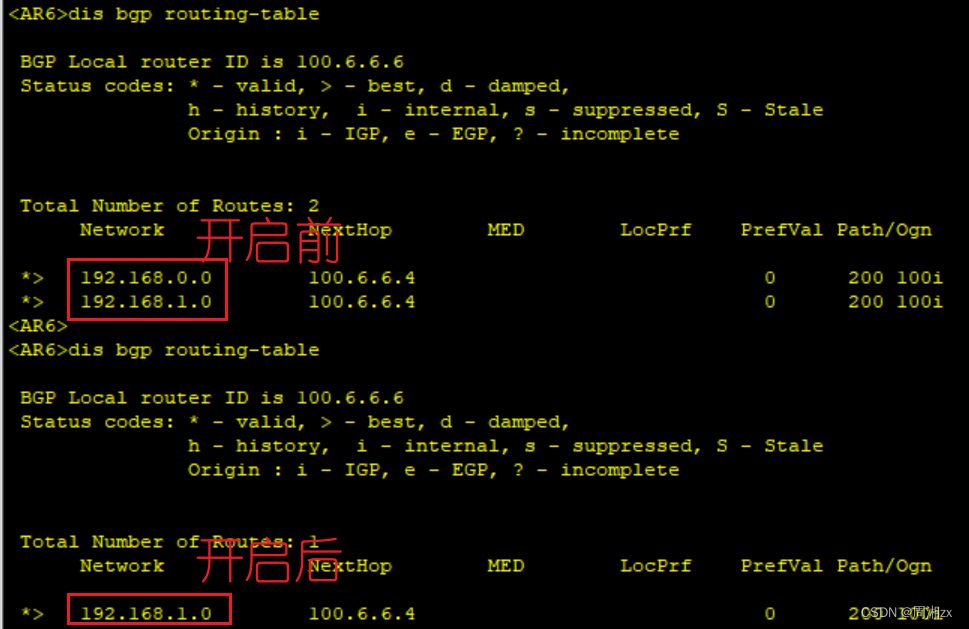
BGP联盟和团体属性实验
目录 一、实验拓扑 二、实验要求 三、实验步骤 1、IP地址配置 2、ospf配置 3、BGP建邻 4、宣告网段 5、配置团体属性 一、实验拓扑 二、实验要求 1、按照图示配 IP 地址,R2,R3,R4,R5分别配 Loopbacke 口地址作为OSPF的Ro…...
代码随想录-刷题第二天
977. 有序数组的平方 题目链接:977. 有序数组的平方 思路:双指针思想,数组是有序的且含有负数,其中元素的平方一定是两边最大。定义两个指针,从两端开始向中间靠近,每次比较两个指针的元素平方大小&#…...
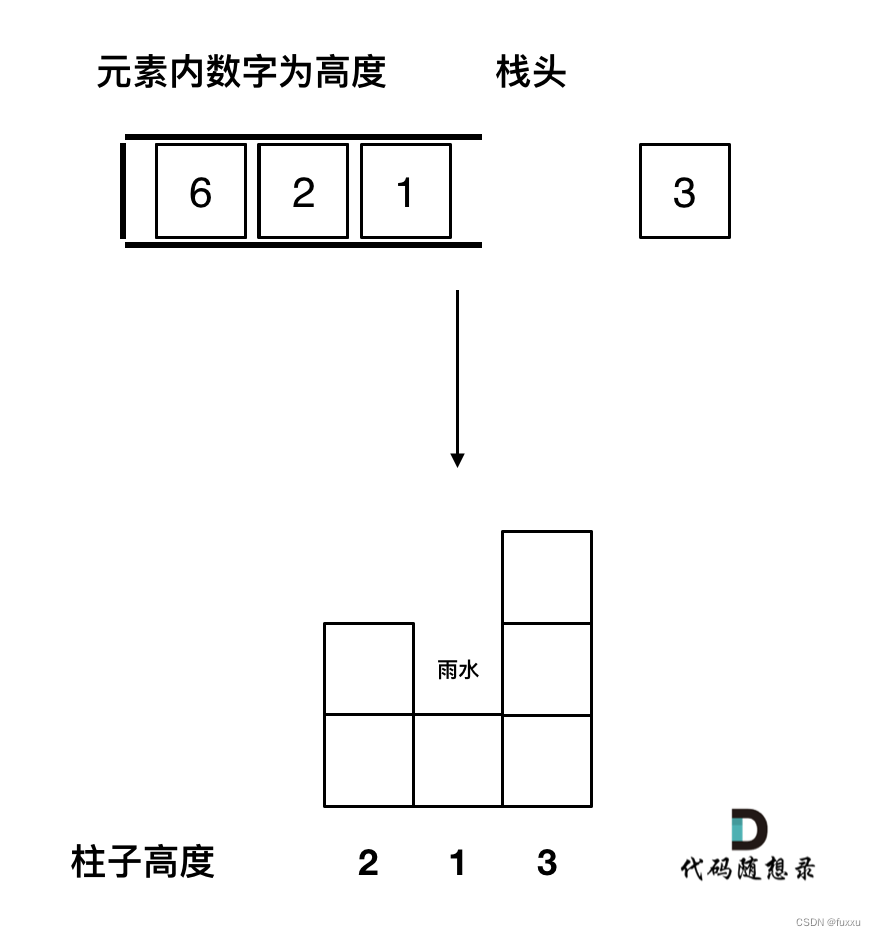
DAY59 503.下一个更大元素II + 42. 接雨水
503.下一个更大元素II 题目要求: 给定一个循环数组(最后一个元素的下一个元素是数组的第一个元素),输出每个元素的下一个更大元素。数字 x 的下一个更大的元素是按数组遍历顺序,这个数字之后的第一个比它更大的数&am…...
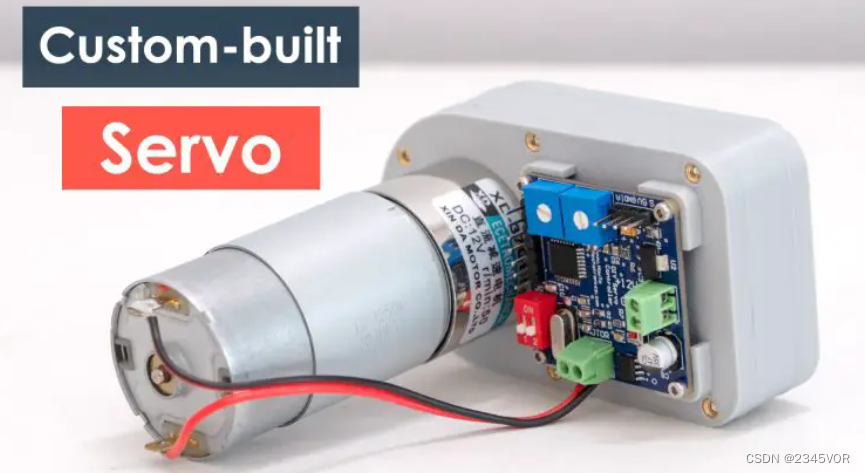
【如何将任何直流电机变成伺服电机】
【如何将任何直流电机变成伺服电机】 1 前沿2 伺服电机工作原理3 如何制作定制伺服电机4 AS5600 编码器 – 磁性旋转位置传感器5 定制伺服电机电路图6 PCB设计7 自定义伺服3D模型8 定制伺服齿轮箱的 3D 打印零件9 对控制器进行编程9.1 引导加载程序刻录9.2 代码上传9.3 源代码9…...
单片机语音芯片在工业控制中的应用优势
单片机语音芯片,这一智能化的代表产品,不仅在家庭和消费电子领域发挥着重要的作用,更为工业控制领域注入了新的活力。将单片机语音芯片与语音交互技术相结合,为工业设备的控制和监测提供了前所未有的解决方案。 首先,…...

【开源】基于Vue.js的高校实验室管理系统的设计和实现
项目编号: S 015 ,文末获取源码。 \color{red}{项目编号:S015,文末获取源码。} 项目编号:S015,文末获取源码。 目录 一、摘要1.1 项目介绍1.2 项目录屏 二、研究内容2.1 实验室类型模块2.2 实验室模块2.3 实…...
Xrdp+内网穿透实现远程访问Linux Kali桌面
XrdpCpolar实现远程访问Linux Kali桌面 文章目录 XrdpCpolar实现远程访问Linux Kali桌面前言1. Kali 安装Xrdp2. 本地远程Kali桌面3. Kali 安装Cpolar 内网穿透4. 配置公网远程地址5. 公网远程Kali桌面连接6. 固定连接公网地址7. 固定地址连接测试 前言 Kali远程桌面的好处在于…...

【洛谷算法题】P5713-洛谷团队系统【入门2分支结构】
👨💻博客主页:花无缺 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 本文由 花无缺 原创 收录于专栏 【洛谷算法题】 文章目录 【洛谷算法题】P5713-洛谷团队系统【入门2分支结构】🌏题目描述🌏输入格…...
Eclipse切换中文环境
PACK包链接 地址,进入后可以看到不同版本的包。 要选择跟自己Eclipse版本一致的包,比如我的Eclipse启动界面如下,我就要找Helios的包( Juno、Indigo、Helios、Kepler这些具体怎么划分的我也不清楚)。 在线安装 打…...

栈和队列概念
栈stack 栈只能在一端插入/删除元素先入后出只能从栈顶插入,栈顶删除栈底不允许插入和删除push:进栈pop:出栈应用场景: 队列 Queue 队列的插入操作称为 “入队”(Enqueue),是在队尾进行的&am…...

从话题数据到3D应用:用Orbbec DaBai DCL和ROS2快速搭建你的第一个点云处理流水线
从话题数据到3D应用:用Orbbec DaBai DCL和ROS2快速搭建你的第一个点云处理流水线 当你第一次看到Orbbec DaBai DCL相机输出的点云数据在RViz2中跳动时,那种将物理世界转化为数字模型的震撼感,是任何文档描述都无法替代的。作为一款支持RGB-D、…...

Oracle 身份证号码解析与年龄计算实战指南
1. 身份证号码解析基础 身份证号码作为个人身份标识,蕴含着丰富的个人信息。在Oracle数据库中处理身份证数据时,首先需要理解其编码规则。我国现行18位身份证号码由6位地区码、8位出生日期、3位顺序码和1位校验码组成。其中第7到14位就是关键的出生日期信…...

前端框架选择指南:别再盲目跟风了!
前端框架选择指南:别再盲目跟风了! 毒舌时刻 前端框架?听起来就像是前端工程师为了显得自己很专业而特意搞的一套复杂流程。你以为随便选个框架就能解决所有问题?别做梦了!到时候你会发现,框架的坑比你想象…...

Movie_Recommend系统架构解析:从数据采集到推荐展示
Movie_Recommend系统架构解析:从数据采集到推荐展示 【免费下载链接】Movie_Recommend 基于Spark的电影推荐系统,包含爬虫项目、web网站、后台管理系统以及spark推荐系统 项目地址: https://gitcode.com/gh_mirrors/mo/Movie_Recommend Movie_Rec…...

ugrep布尔搜索实战:使用AND/OR/NOT构建复杂查询
ugrep布尔搜索实战:使用AND/OR/NOT构建复杂查询 【免费下载链接】ugrep Ugrep 4.3: an ultra fast, user-friendly, compatible grep. Ugrep combines the best features of other grep, adds new features, and searches fast. Includes a TUI and adds Google-lik…...

批量为视频文件添加内嵌封面:两种模式的适用场景与配置
记录一下使用【批量添加MP4封面工具】的实践经验,重点讲两种封面模式的选择和配置。背景视频文件(MP4、MKV等)支持在文件内部嵌入封面图片(attached_pic)。嵌入后,在文件管理器的缩略图视图中会显示指定的封…...

IM1281B电量计模块避坑指南:从接线到数据解析的全流程实战
IM1281B电量计模块实战全解析:从硬件对接到数据处理的完整解决方案 在智能电表、能耗监测和物联网设备开发中,精确测量电能消耗是核心需求之一。IM1281B作为一款高性价比的单相电能计量模块,以其Modbus通信协议和直接电能脉冲输出功能&#x…...

FGA智能自动化:重新定义Fate/Grand Order效率提升新范式
FGA智能自动化:重新定义Fate/Grand Order效率提升新范式 【免费下载链接】FGA Auto-battle app for F/GO Android 项目地址: https://gitcode.com/gh_mirrors/fg/FGA 在Fate/Grand Order的游戏世界中,90%的玩家每天都在重复着机械的刷本操作&…...

YOLOv8与YOLOv11网络结构对比:从yolov8.yaml到yolo11.yaml的演进与优化
YOLOv8与YOLOv11网络结构深度对比:从架构设计到性能优化 在计算机视觉领域,目标检测技术一直是研究热点,而YOLO(You Only Look Once)系列作为其中的佼佼者,以其高效的实时检测能力广受关注。本文将深入剖析YOLOv8与YOLOv11的网络结…...

【完整源码+数据集+部署教程】光纤缺陷检测系统源码分享[一条龙教学YOLOV8标注好的数据集一键训练_70+全套改进创新点发刊_Web前端展示]
一、背景意义 随着光纤通信技术的迅猛发展,光纤作为信息传输的主要媒介,其质量的优劣直接影响到通信系统的性能和稳定性。光纤在生产、运输和安装过程中,可能会出现各种缺陷,如划痕、气泡、折弯等,这些缺陷不仅会导致信…...