px4+vio实现无人机室内定位
文章主要讲述px4 如何利用vins_fusion里程计数据实现在室内定位功能。
文章基于以下软、硬件展开。
| 硬件 | 软件 |
|---|---|
| 机载电脑: Intel NUC | 系统:Ubuntu 20.04 |
| 相机: Intel Realsense D435i | ros:noetic |
| 飞控:Pixhawk 2.4.8 | 固件:PX4 1.14.0 |
完整vins_to_mavros 功能包地址:
https://github.com/rotorcraftman/px4ctrl
随着slam开源技术的普及,px4 要实现室内定位,实现方式很多,如文章使用的vins-fusion等视觉里程计,激光里程计等。
本质上,要实现无人机的室内定位有两个方法:
1.提供室内位置信息
室外可以用gps提供位置信息,实现定位,而室内因为gps没有信号,所以朴素的想法是只要提供位置信息给飞控就可实现像室外gps定位的效果了。
思路:
vio提供里程计—>(/mavros/vision_posion/pose)mavros(mavlink)—>px4
可以看出mavros起到了连接vio和px4的桥梁作用。
2.offboard
外部计算机遵守照MAVLink 协议提供的位置,速度或姿态设定值。 设定值可以由机载计算机上运行的 MAVLink API(例如 MAVSDK (opens new window) 或 MAVROS (opens new window))提供(通常通过串口或 wifi 连接)。
3.光流、UWB等。
接下来详细讲述第一种实现方式,vio以vins_fusion为例。
文章叙述展开方式默认已完成了px4飞控的建立、mavros的安装,未完成的同志可参考上一篇文章:
gazebo11+px4联合仿真测试
一、Pixhawk MAVLink Ports配置
配置Pixhawk Telem2作为与机载电脑数据交互的MAVLINK端口
MAV_1_CONFIG= TELEM 2
MAV_1_MODE = Onboard
SER_TEL2_BAUD = 921600 8N1
设置前参数里可能只有MAV_1_CONFIG,搜不到其他的参数,将MAV_1_CONFIG设置为TELEM 2,然后把飞控重启后其他参数就有了。
Pixhawk 2.4.8硬件,设置为102,参数对应关系如下。

详细参数介绍参见:https://docs.px4.io/main/en/advanced_config/parameter_reference.html
Pixhawk 2.4.8 TELEM1/TELEM2端口设置如下:
| TELEM1 | TELEM2 |
|---|---|
| MAV_0_CONFIG = TELEM 1 | MAV_1_CONFIG = TELEM 2 |
| MAV_0_MODE = Normal | MAV_1_MODE = Onboard |
| MAV_0_RATE= 1200 Bytes/s | MAV_1_RATE= 0 (Half maximum) |
| MAV_0_FORWARD = True | MAV_1_FORWARD = Disabled |
| SER_TEL1_BAUD = 57600 | SER_TEL2_BAUD = 921600 |
详细端口设置参见:https://docs.px4.io/main/en/peripherals/mavlink_peripherals.html
配置好端口后,需要做一根连接机载电脑和Pixhawk TELEM 2 端口的线,我这边直接用一个USB转TTL模块。
Pixhawk TELEM1 / TELEM2 端口线序图如下:
| Pin | Signal | Volt |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
其它端口详见:https://docs.px4.io/main/en/flight_controller/pixhawk.html#where-to-buy
展示一张做好的端子连接线如下:

在qgc上测试通信是否正常。
qgc-Application Settings-通讯连接-添加,设置如下。

正常情况下,就可通过TELEM 2连上QGC了。
二、在机载电脑上启动MAVROS
我这里用的是nuc的usb,设备名称:dev/ttyUSB0,按照自己实际情况配置。921600是波特率,就是前面设置的SER_TEL2_BAUD参数,改成设置值就行。
roslaunch mavros px4.launch fcu_url:=serial:=/dev/ttyUSB0:921600 gcs_url:=udp://@172.16.7.210
gcs_url:运行qgc主机的IP地址。
如果不想设置ip,可以设置为以下参数自动寻址。
roslaunch mavros px4.launch fcu_url:=serial:=/dev/ttyUSB0:921600 gcs_url:=udp-b://@
若出现报错
FCU: DeviceError:serial:open: Permission denied
解决方法是给对应的串口权限
sudo chmod 777 /dev/ttyUSB0
三、vins_fusion、mavros建立连接
思考vins_fusion的里程计数据如何发布给px4?
这也是实现室内定位的关键。实现这一步只需将vins_fusion里程计数据以话题 /mavros/vision_pose/pose 发布,mavros 收到/mavros/vision_pose/pose话题后,转化成mavlink通过TELEM 2传给飞控。于是就完成了vins_fusion和px4的连接。
接下来创建发布 /mavros/vision_pose/pose 话题的功能包过程了
1.创建工作空间px4ctrl
mkdir -p px4ctrl/src/
cd px4ctrl/src/
2.创建功能包vins_to_mavros
catkin_create_pkg vins_to_mavros roscpp std_msgs geometry_msgs mavros_msgs nav_msgs tf2_eigen tf
在px4ctrl/src/vins_to_mavros/src/ 目录下创建一个 vins_to_mavros 节点,主要功能:
(1)将 VINS-Fusion 的 body 坐标系在 world 坐标系下为位姿转化为 base_link 在 map 坐标系中的位姿;
(2)将转化后的位姿信息以话题 /mavros/vision_pose/pose 发布。
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_msgs/Odometry.h>
#include <Eigen/Eigen>Eigen::Vector3d p_mav;
Eigen::Quaterniond q_mav;void vins_callback(const nav_msgs::Odometry::ConstPtr &msg)
{if(msg->header.frame_id == "world"){p_mav = Eigen::Vector3d(msg->pose.pose.position.y, -msg->pose.pose.position.x, msg->pose.pose.position.z);q_mav = Eigen::Quaterniond(msg->pose.pose.orientation.w, msg->pose.pose.orientation.x, msg->pose.pose.orientation.y, msg->pose.pose.orientation.z);Eigen::AngleAxisd roll(M_PI/2,Eigen::Vector3d::UnitX()); // 绕 x 轴旋转 pi / 2Eigen::AngleAxisd pitch(0,Eigen::Vector3d::UnitY());Eigen::AngleAxisd yaw(0,Eigen::Vector3d::UnitZ());Eigen::Quaterniond _q_mav = roll * pitch * yaw;q_mav = q_mav * _q_mav;}
}int main(int argc, char **argv)
{ros::init(argc, argv, "vins_to_mavros");ros::NodeHandle nh("~");ros::Subscriber slam_sub = nh.subscribe<nav_msgs::Odometry>("odom", 100, vins_callback);ros::Publisher vision_pub = nh.advertise<geometry_msgs::PoseStamped>("vision_pose", 10);// the setpoint publishing rate MUST be faster than 2Hzros::Rate rate(20.0);ros::Time last_request = ros::Time::now();while(ros::ok()) {geometry_msgs::PoseStamped vision;vision.pose.position.x = p_mav[0];vision.pose.position.y = p_mav[1];vision.pose.position.z = p_mav[2];vision.pose.orientation.x = q_mav.x();vision.pose.orientation.y = q_mav.y();vision.pose.orientation.z = q_mav.z();vision.pose.orientation.w = q_mav.w();vision.header.stamp = ros::Time::now();vision_pub.publish(vision);ROS_INFO("\nposition:\n x: %.18f\n y: %.18f\n z: %.18f\norientation:\n x: %.18f\n y: %.18f\n z: %.18f\n w: %.18f", \p_mav[0],p_mav[1],p_mav[2],q_mav.x(),q_mav.y(),q_mav.z(),q_mav.w());ros::spinOnce();rate.sleep();}return 0;
}3.配置 CMakeList.txt 文件
找到相应位置添加
add_executable(vins_to_mavros_node src/vins_to_mavros.cpp)
target_link_libraries(vins_to_mavros_node ${catkin_LIBRARIES})
4.创建vins_to_mavros节点的launch文件
在目录px4ctrl/src/launch/ 创建vins_to_mavros.launch
<launch><node pkg="vins_to_mavros" type="vins_to_mavros_node" name="vins_to_mavros" output="screen"><remap from="~vision_pose" to="/mavros/vision_pose/pose" /><remap from="~odom" to="/vins_estimator/odometry" /></node>
</launch>5.编译
cd px4ctrl
catkin_make
source devel/setup.bash
6.验证
启动vins_to_mavros节点
roslaunch vins_to_mavros vins_to_mavros.launch
查看话题
rostopic list
显示如下:

PS:此处坐标系转化适配的是Realsense D435i相机,如其它相机需要根据相机imu坐标系与px4坐标系进行相应的转换。
四、联调测试
联调测试的基础是:
1.vins_fusion里程计精度尚可,且具有一定的鲁棒性;
2.px4飞控在自稳模式下手动可控、达到可飞条件。
关于vins_fusion的相关调试参见系列文章:
https://blog.csdn.net/u010196944/article/details/127240169
1.px4飞控设置
将px4定位数据源设置为vinsion,参数EKF2_AID_MASK设置为24,具体如下:

2.在终端依次输入:

此时qgc已连上,可在qgc作如下验证。
Analyze Tools-MAVlink检测,出现了LOCAL_POSITION_NED数据,如下:

验证:
(1)前后左右移动飞机,看看位置是否正确。
(2)前后移动飞机后,放回原位置看位置数据偏差是否大。
验证没问题之后,就可以起飞,通过qgc或者遥控器切换定位模式了。

完结,希望你一切顺利,不“炸鸡”。
参考
1.https://blog.csdn.net/u010196944/article/details/127240169
2.https://docs.px4.io/main/en/
3.https://zhuanlan.zhihu.com/p/364390798
4.https://blog.csdn.net/qq_44998513/article/details/133144421?spm=1001.2014.3001.5502
相关文章:
px4+vio实现无人机室内定位
文章主要讲述px4 如何利用vins_fusion里程计数据实现在室内定位功能。 文章基于以下软、硬件展开。 硬件软件机载电脑: Intel NUC系统:Ubuntu 20.04相机: Intel Realsense D435iros:noetic飞控:Pixhawk 2.4.8固件&am…...
享元模式 rust和java的实现
文章目录 享元模式介绍实现javarust实现代码 rust仓库rust仓库 享元模式 享元模式(Flyweight Pattern)主要用于减少创建对象的数量,以减少内存占用和提高性能。这种类型的设计模式属于结构型模式,它提供了减少对象数量从而改善应…...

XmlElement注解在Java的数组属性上,以产生多个相同的XML元素
例如,下面这段XML数据,有多个data元素,并且它们级别相同: <?xml version"1.0" encoding"UTF-8"?><request><reqtype>05</reqtype><secret>test</secret><body><userid&…...

SQLServer 数字加千分位 用FORMAT函数强转不管多大位数
问题 CONVERT ( money, CONVERT ( money, CAST ( round( FTP_AMOUNT, 2 ) AS NUMERIC ( 20, 2 ) ) ) 1 ) AS FTP_AMOUNT用的money函数 结果空间不足,无法将 money 值转换为 varchar。 可以强转 select FORMAT(CAST ( round( ‘-8926143870680.62000000’, 2 ) AS N…...

说说mvc和mvvm的区别和联系
mvvm 与mvc mvvm 与mvcmvc和mvvm的区别和联系 举例说明mvvm与mvc MVC是一种用于构建应用程序的架构模式,它也将应用程序的逻辑和界面分离。它由三个主要组件组成: 模型(Model):表示应用程序的数据和业务逻辑。视图&a…...
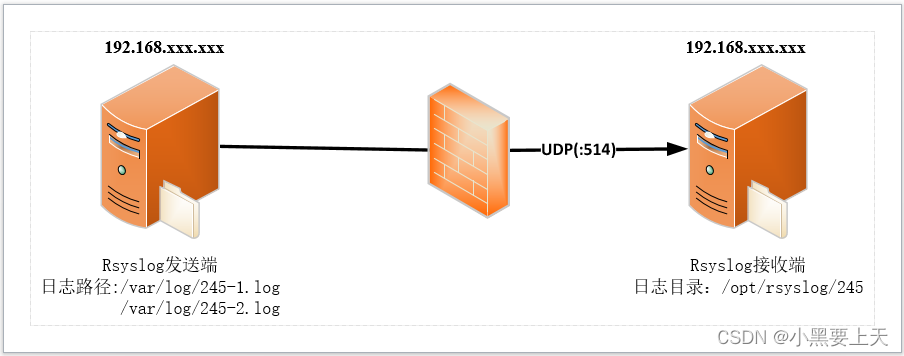
linux rsyslog综合实战2
本次我们通过rsyslog服务将A节点服务器上的两个(E.g:多个日志也可以)日志(Path:/var/log/245-1.log、245-2.log)实时同步到B节点服务器目录下(Path:/opt/rsyslog/245) 1.rsyslog架构 2.环境信息 环境信息 HostnameIpAddressOS versionModuleNotersyslog1192.168.10.245CentOS…...

AcWing 4. 多重背包问题 I 学习笔记
有 N� 种物品和一个容量是 V� 的背包。 第 i� 种物品最多有 si�� 件,每件体积是 vi��,价值是 wi��。 求解将哪些物品装入背包,可使物…...
时,反而打开浏览器的预览界面)
解决selenium使用chrome下载文件(如pdf)时,反而打开浏览器的预览界面
文章目录 解决方法完整的配置 解决方法 在初始化浏览器的时候,添加以下配置即可: option webdriver.ChromeOptions()prefs {"profile.managed_default_content_settings.images": 2, # 禁止加载图片# permissions.default.stylesheet: 2, …...

2024年山东省职业院校技能大赛中职组“网络安全”赛项竞赛试题-C
2024年山东省职业院校技能大赛中职组 “网络安全”赛项竞赛试题-C 一、竞赛时间 总计:360分钟 二、竞赛阶段 竞赛阶段 任务阶段 竞赛任务 竞赛时间 分值 A、B模块 A-1 登录安全加固 180分钟 200分 A-2 本地安全策略设置 A-3 流量完整性保护 A-4 …...

基于Python实现用于实时监控和分析 MySQL 服务器的性能指标和相关信息工具源码
MySQL命令行监控工具 - mysqlstat 介绍 mysqlstat 是一个命令行工具,用于实时监控和分析 MySQL 服务器的性能指标和相关信息。 它可以帮助 DBA(数据库管理员)和开发人员定位和解决数据库性能问题。 以下是 mysqlstat 工具的主要功能&#…...

Android 10-13鼠标右键返回功能适配
Android 10-13鼠标右键返回功能适配 文章目录 Android 10-13鼠标右键返回功能适配一、前言二、鼠标右键适配修改1、Android 10 以及更低版本2、Android11 或者更高版本三、总结1、鼠标右键返回功能修改主要代码2、标右键返回修改代码系统源码搜索3、其他 一、前言 Android 原生…...
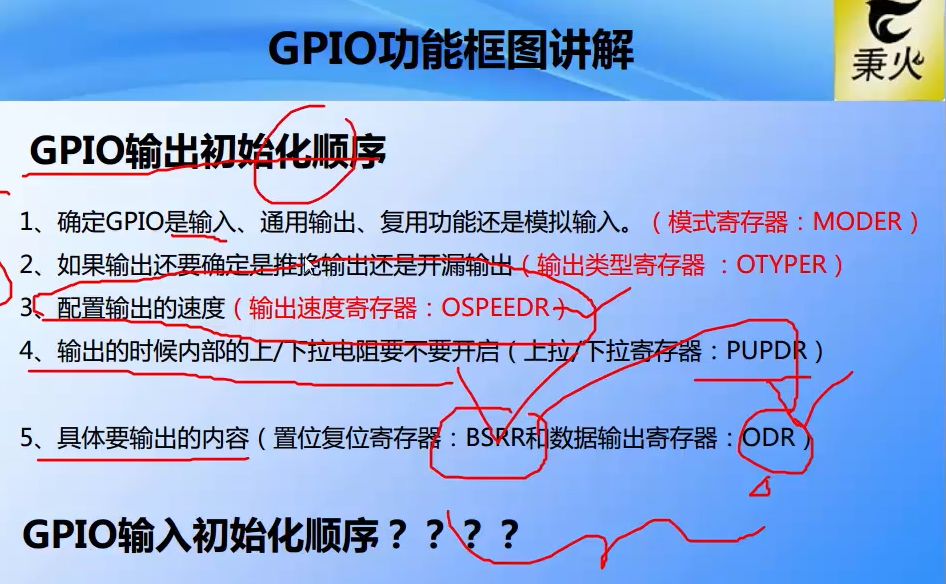
51单片机/STM32F103/STM32F407学习1_点亮LED灯
目录: 基础知识单片机从0实现单片机GPIO介绍 参考连接: 野火霸天虎教程 https://doc.embedfire.com/products/link/zh/latest/mcu/stm32/ebf_stm32f407_batianhu_v1_v2/download/stm32f407_batianhu_v1_v2.html x.1 基础知识 x.1.1 指针中的取地址&a…...
(Transfer Learning)迁移学习在IMDB上训练情感分析模型
1. 背景 有些场景下,开始的时候数据量很小,如果我们用一个几千条数据训练一个全新的深度机器学习的文本分类模型,效果不会很好。这个时候你有两种选择,1.用传统的机器学习训练,2.利用迁移学习在一个预训练的模型上训练…...
蓝桥杯每日一题2023.11.20
题目描述 “蓝桥杯”练习系统 (lanqiao.cn) 题目分析 方法一:暴力枚举,如果说数字不在正确的位置上也就意味着这个数必须要改变,进行改变记录即可 #include<bits/stdc.h> using namespace std; const int N 2e5 10; int n, a[N], …...

【迅搜02】究竟什么是搜索引擎?正式介绍XunSearch
究竟什么是搜索引擎?正式介绍XunSearch 啥?还要单独讲一下啥是搜索引擎?不就是百度、Google嘛,这玩意天天用,还轮的到你来说? 额,好吧,虽然大家天天都在用,但是我发现&am…...
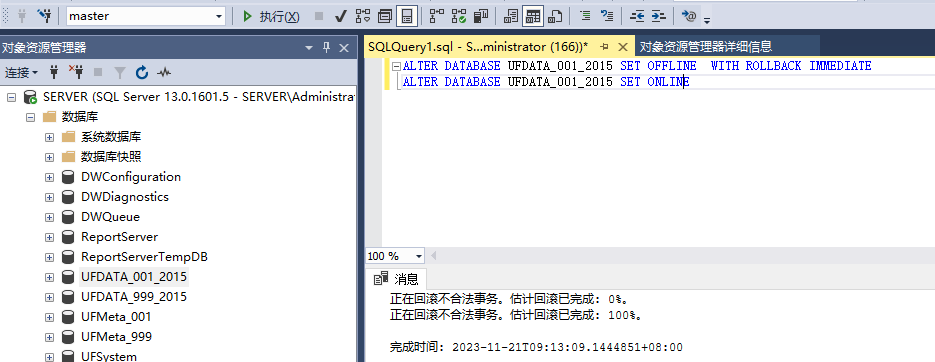
【Sql】sql server还原数据库的时候,提示:因为数据库正在使用,所以无法获得对数据库的独占访问权。
【问题描述】 sql server 还数据库的时候,提示失败。 点击左下角进度位置,可以得到详细信息: 因为数据库正在使用,所以无法获得对数据库的独占访问权。 【解决方法】 针对数据库先后执行下述语句,获得独占访问权后&a…...
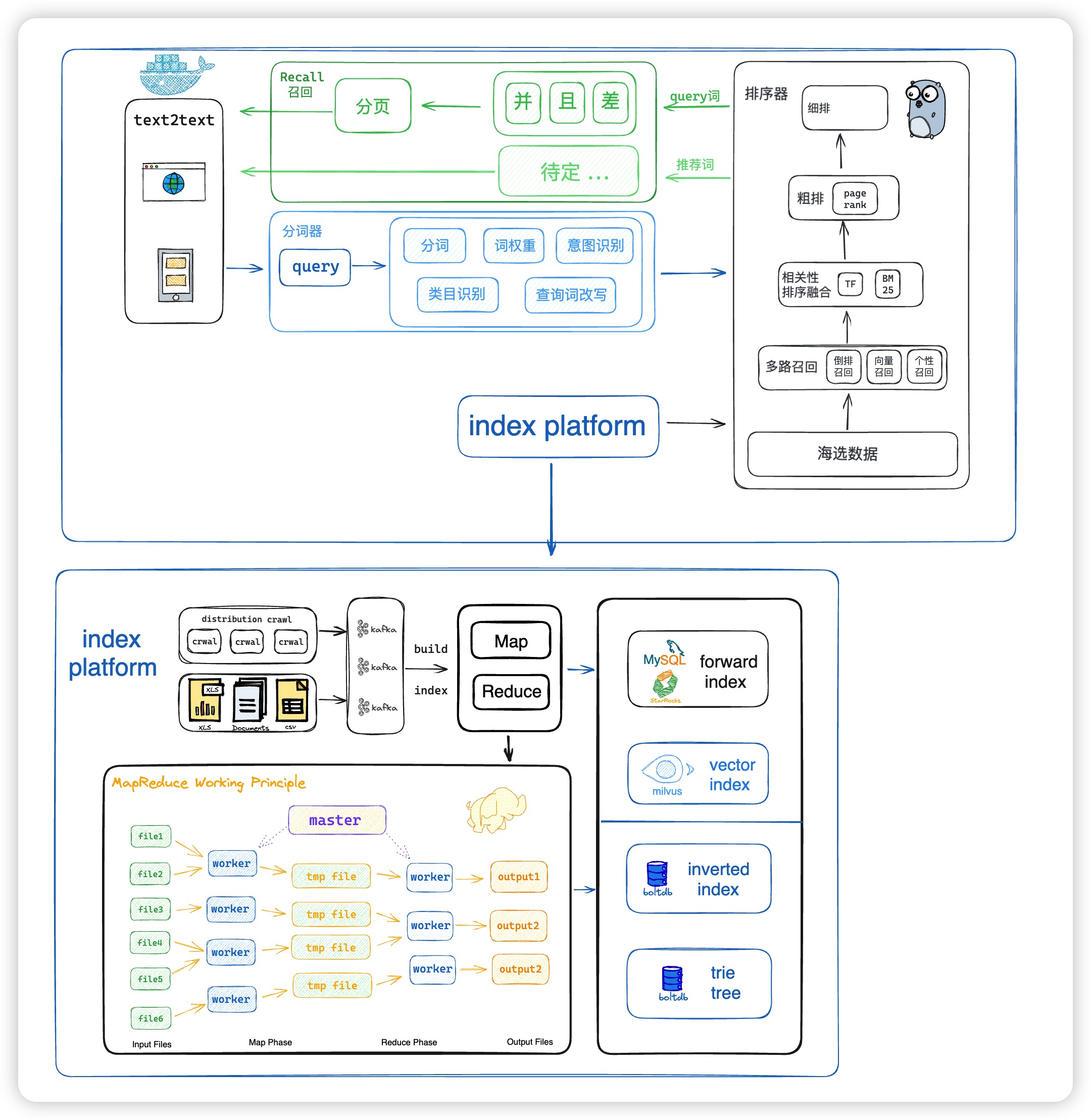
【Go语言实战】(26) 分布式搜索引擎
Tangseng 基于Go语言的搜索引擎 github地址:https://github.com/CocaineCong/tangseng 详细介绍地址:https://cocainecong.github.io/tangseng 这两周我也抽空录成视频发到B站的~ 本来应该10月份就要发了,结果一鸽就鸽到现在hh…...
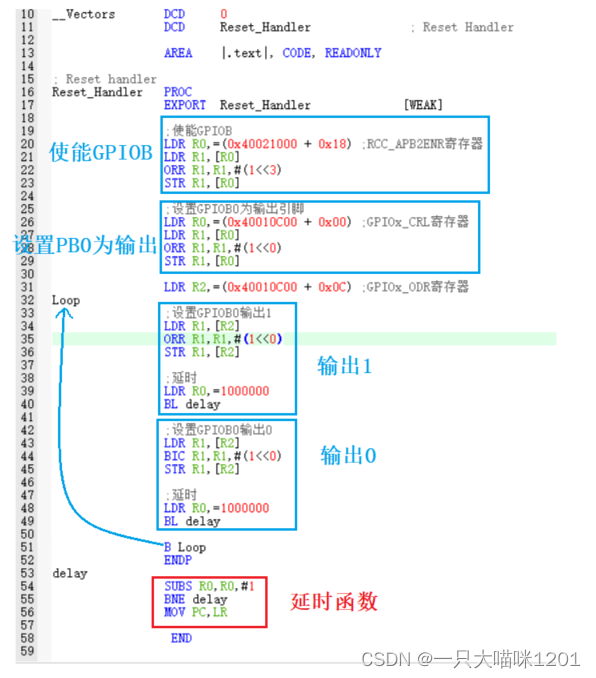
【理解ARM架构】不同方式点灯 | ARM架构简介 | 常见汇编指令 | C与汇编
🐱作者:一只大喵咪1201 🐱专栏:《理解ARM架构》 🔥格言:你只管努力,剩下的交给时间! 目录 🏀直接操作寄存器点亮LED灯🏀地址空间🏀ARM内部的寄存…...

JS服务端技术—Node.js知识点锦集
【版权声明】未经博主同意,谢绝转载!(请尊重原创,博主保留追究权) https://blog.csdn.net/m0_69908381/article/details/134544523 出自【进步*于辰的博客】 接触Node.js挺长时间了,工作也经常使用…...
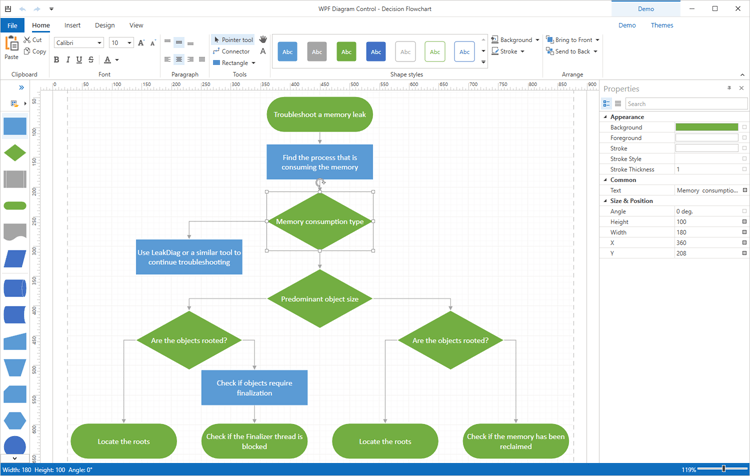
界面控件DevExpress WPF流程图组件,完美复制Visio UI!(一)
DevExpress WPF Diagram(流程图)控件帮助用户完美复制Microsoft Visio UI,并将信息丰富且组织良好的图表、流程图和组织图轻松合并到您的下一个WPF项目中。 P.S:DevExpress WPF拥有120个控件和库,将帮助您交付满足甚至…...
)
企业AI转型停滞?立即下载AISMM模型:2024最新版含行业基准数据库(金融/制造/医疗三套校准参数)
更多请点击: https://intelliparadigm.com 第一章:AI成熟度评估工具:AISMM模型下载 AISMM(Artificial Intelligence Software Maturity Model)是由IEEE标准协会支持的开源AI工程化评估框架,专为组织级AI能…...
:从训练到上线压缩至72小时)
大模型MLOps流水线重构全图解(奇点大会首发架构图):从训练到上线压缩至72小时
更多请点击: https://intelliparadigm.com 第一章:大模型时代工程实践:奇点智能大会核心议题 在2024年奇点智能大会上,大模型工程化落地成为贯穿全场的技术主线。与会专家一致指出:模型能力已不再是瓶颈,而…...

高速数字与混合信号设计:S参数、PLL与电源完整性实战解析
1. 从DesignCon 2012看高速数字与混合信号设计的核心挑战与实战应对十几年前,当我还是一名刚入行的硬件工程师,面对PCB上GHz级别的信号完整性问题焦头烂额时,DesignCon这样的行业盛会就像一座灯塔。2012年的DesignCon,其技术议题的…...

动态总线电压架构:数据中心电源能效优化的核心技术解析
1. 项目概述:从固定总线到动态总线的能效革命在数据中心和通信设备机房里,你听到的持续嗡鸣声,不仅仅是服务器风扇的嘶吼,更是巨额电费账单的具象化体现。作为一名硬件工程师,我常年与各种板卡和电源系统打交道&#x…...

开源免费的WPS AI 软件 察元AI文档助手:链路 055:从 Ribbon 到 fetch 的速查顺序
链路 055:从 Ribbon 到 fetch 的速查顺序 总体链路图 下图在全系列各篇保持一致,仅通过高亮样式标示本篇所覆盖的环节;箭头表示主成功路径,点线为异常或可选路径。阅读任意一篇时都应能回到本图定位,避免在单文件里「…...

从ESC SV幕后筹备看技术会议的系统工程与参会策略
1. 从“Day -1”的视角看一场顶级技术盛会的幕后如果你也和我一样,是个在嵌入式系统、半导体设计或者硬件开发领域摸爬滚打了有些年头的工程师,那么“ESC SV”(Embedded Systems Conference Silicon Valley)这个名字,对…...

终极植物大战僵尸辅助工具:如何免费解锁游戏隐藏功能
终极植物大战僵尸辅助工具:如何免费解锁游戏隐藏功能 【免费下载链接】pvztools 植物大战僵尸原版 1.0.0.1051 修改器 项目地址: https://gitcode.com/gh_mirrors/pv/pvztools 植物大战僵尸辅助工具PvZ Tools是一款专为经典游戏《植物大战僵尸》1.0.0.1051版…...

终极免费MP4视频修复工具:如何用Untrunc快速恢复损坏视频文件
终极免费MP4视频修复工具:如何用Untrunc快速恢复损坏视频文件 【免费下载链接】untrunc Restore a damaged (truncated) mp4, m4v, mov, 3gp video. Provided you have a similar not broken video. 项目地址: https://gitcode.com/gh_mirrors/unt/untrunc 你…...

GTNH中文汉化终极指南:3步解锁百万字专业翻译体验
GTNH中文汉化终极指南:3步解锁百万字专业翻译体验 【免费下载链接】Translation-of-GTNH GTNH整合包的汉化 项目地址: https://gitcode.com/gh_mirrors/tr/Translation-of-GTNH 还在为GregTech: New Horizons(GTNH)整合包复杂的英文界…...

FPGA与EtherSound在专业音频设备中的低延迟实现
1. FPGA与EtherSound技术概述在专业音频设备开发领域,实时性和信号保真度是两大核心诉求。传统基于通用处理器的架构往往难以同时满足这两点要求,而FPGA(现场可编程门阵列)因其独特的硬件可编程特性和并行计算能力,正逐…...