Ceres使用
之前用过Ceres,但是只是跑例程,现在来着重学习一下使用流程。
1. 解决的问题
主要解决非线性优化问题。Ceres是一个较为通用的库。
参考链接
2. 如何使用
这个是求解的函数,主要关注这三个参数
CERES_EXPORT void Solve(const Solver::Options& options, Problem* problem, Solver::Summary* summary);
1. options
与优化相关的一些参数配置
2. problem
定义problem
重要的函数
ResidualBlockId AddResidualBlock(CostFunction* cost_function,LossFunction* loss_function,const std::vector<double*>& parameter_blocks);
其中cost_function是需要我们自己定义的代价函数,拿SLAM14讲中的CURVE_FITTING_COST为例
添加残差项:
ceres::Problem problem;for(int i=0; i<N; ++i){ //100个点句添加100个误差项//使用自动求导problem.AddResidualBlock(new ceres::AutoDiffCostFunction<CURVE_FITTING_COST, 1, 3>(new CURVE_FITTING_COST(x_data[i], y_data[i])),nullptr,abc //待估计参数,可在此处给初值);}
其中,AddResidualBlock
@param1ceres::AutoDiffCostFunction是用自动求导的方式,是一个类模板,需要传入参数类型实例化为模板类(类名,输出维度(标量误差,维度1),输入维度(abc三个参数,维度3)),然后传入实际参数来实例化出一个类,(也可以自己求雅克比传给ceres,这里不多说)
@param2 核函数一般不用,传nullptr
@param3 待估计参数(由于非线性优化对初值敏感,所以可以从这里传入待优化变量的初值)
关于残差项的构建:
using namespace std;
struct CURVE_FITTING_COST{CURVE_FITTING_COST(double x, double y):_x(x), _y(y){} //构造函数需要传入的对象template<typename T>bool operator()(const T *const abc, T *residual) const {residual[0] = T(_y) - ceres::exp(abc[0] * T(_x) * T(_x) + abc[1] * T(_x) + abc[2]);return true;}const double _x, _y;
};
重载operator(),
@param1 :输入参数,三维待估计参数。
@param2 :输出参数,一维误差。
这个函数就是用输入的参数通过计算,算出残差用于求导。
3. summary
用于保存优化log(日志)
3. 求导方式
3.1 自行求导
求导方式有自行求导和Autodiff
自行求导需要继承ceres::SizedCostFunction,并重载Evaluate()函数自行推导导数计算jacobians,parameters传入的即为待优化参数,
调用:
CameraLidarFactor *f = new CameraLidarFactor(Rl1_l2, tl1_l2, _z); //求导方式problem.AddResidualBlock(f, new ceres::HuberLoss(1e-6), &_phi, _t); //第三部分为待优化参数,可赋初值
具体实现:
class CameraLidarFactor : public ceres::SizedCostFunction<2, 1, 2> { //第一个是输出维度,phi和t一个1维,一个2维
public:CameraLidarFactor(Matrix2d &Rl1_l2, Vector2d &tl1_l2, Vector2d &z) : // 待优化的phi,lidar系下的平移Rl1_l2(Rl1_l2), tl1_l2(tl1_l2), z_(z) {}virtual bool Evaluate(double const *const *parameters, double *residuals, double **jacobians) const {double phi_l_lc = parameters[0][0];Matrix2d Rl_lc; // rot2d_from_yawRl_lc << cos(phi_l_lc), -sin(phi_l_lc),sin(phi_l_lc), cos(phi_l_lc);Vector2d tl_lc(parameters[1][0], parameters[1][1]);Vector2d thc1_hc2 = (-tl_lc + tl1_l2 + Rl1_l2 * tl_lc); // -(l1)tl1_lc1 + (l1)tl1_l2 + Rl1_l2 * (l2)tl2_lc2Map<Vector2d> residual(residuals);residual = Rl_lc.inverse() * thc1_hc2 - z_; //(hc1)thc1_hc2' - (hc1)thc1_hc2if (jacobians) {if (jacobians[0]) {Matrix2d Rl_hc_inverse_prime;Rl_hc_inverse_prime << -sin(phi_l_lc), cos(phi_l_lc), //逆求导-cos(phi_l_lc), -sin(phi_l_lc);Map<Matrix<double, 2, 1>> jacobian_phi(jacobians[0]);jacobian_phi = Rl_hc_inverse_prime * thc1_hc2;}if (jacobians[1]) {Map<Matrix<double, 2, 2, RowMajor>> jacobian_t(jacobians[1]);jacobian_t = Rl_lc.inverse() * (Rl1_l2 - Matrix2d::Identity());}}return true;}Matrix2d Rl1_l2;Vector2d tl1_l2, z_;
};
3.2 Autodiff自动求导
在定义costfunction时选择ceres::AutoDiffCostFunction使用自动求导,求数值导数,需要重载operator()。
**注意:**这里重载operator需要是函数模板,里面所有的数据都要使用模板的数据类型。
调用:
ceres::CostFunction *cost_function = NULL;cost_function = CamTiltFactor::Create(init_z, image_poses_[i].second.translation());problem.AddResidualBlock(cost_function, new ceres::HuberLoss(1e-5), para_qic);
实现:
struct CamTiltFactor {CamTiltFactor(const double init_z, const Eigen::Vector3d trans) :init_z_(init_z), trans_(trans) {}static ceres::CostFunction *Create(const double init_z, Eigen::Vector3d trans) {return new ceres::AutoDiffCostFunction<CamTiltFactor, 1, 4>(new CamTiltFactor(init_z, trans));}template<typename _T2>bool operator()(const _T2 *const para_qic, _T2 *residuals) const {//计算residualspara_qic[0]Eigen::Quaternion<_T2> _quat{para_qic[0], para_qic[1], para_qic[2], para_qic[3]};Eigen::Matrix<_T2, 3, 1> tmp_trans_(_T2(trans_.x()), _T2(trans_.y()), _T2(trans_.z()));Eigen::Matrix<_T2, 3, 1> _t_rotated = _quat * tmp_trans_; //使用重载的乘法residuals[0] = _T2(_t_rotated.z()) - _T2(init_z_); //残差return true;}Vector3d trans_;double init_z_;
};
另外,当四元数为优化的对象时,需要调用ceres::QuaternionParameterization来消除自由度冗余
double para_qic[4] = {1, 0, 0, 0};problem.AddParameterBlock(para_qic, 4, new ceres::QuaternionParameterization);
相关文章:

Ceres使用
之前用过Ceres,但是只是跑例程,现在来着重学习一下使用流程。 1. 解决的问题 主要解决非线性优化问题。Ceres是一个较为通用的库。 参考链接 2. 如何使用 这个是求解的函数,主要关注这三个参数 CERES_EXPORT void Solve(const Solver::O…...
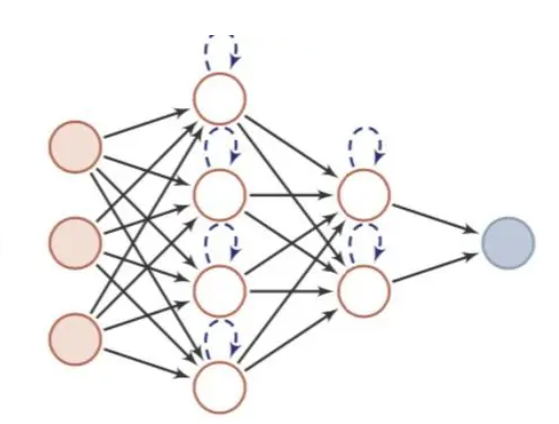
深度学习第1天:深度学习入门-Keras与典型神经网络结构
☁️主页 Nowl 🔥专栏《机器学习实战》 《机器学习》 📑君子坐而论道,少年起而行之 文章目录 神经网络 介绍 结构 基本要素 Keras 介绍 导入 定义网络 模型训练 前馈神经网络 特点 常见类型 代码示例 反馈神经网络 特点 …...

青云科技容器平台与星辰天合存储产品完成兼容性互认证
近日, 北京青云科技股份有限公司(以下简称:青云科技)的 KubeSphere 企业版容器平台成功完成了与 XSKY星辰天合的企业级分布式统一数据平台 V6(简称:XEDP)以及天合翔宇分布式存储系统 V6…...

谈谈基于Redis的分布式锁
目录 前言 基本介绍 演化过程 防死锁 防误删 自动续期 可重入 主从一致 总结 前言 在我们没有了解分布式锁前,使用最多的就是线程锁和进程锁,但他们仅能满足在单机jvm或者同一个操作系统下,才能有效。跨jvm系统,无法…...

逸学java【初级菜鸟篇】10.I/O(输入/输出)
hi,我是逸尘,一起学java吧 目标(任务驱动) 1.请重点的掌握I/O的。 场景:最近你在企业也想搞一个短视频又想搞一个存储的云盘,你一听回想到自己对于这些存储的基础还不是很清楚,于是回家开始了…...

【Python进阶笔记】md文档笔记第6篇:Python进程和多线程使用(图文和代码)
本文从14大模块展示了python高级用的应用。分别有Linux命令,多任务编程、网络编程、Http协议和静态Web编程、htmlcss、JavaScript、jQuery、MySql数据库的各种用法、python的闭包和装饰器、mini-web框架、正则表达式等相关文章的详细讲述。 全套md格式笔记和代码自…...

基于Vue+SpringBoot的数字化社区网格管理系统
项目编号: S 042 ,文末获取源码。 \color{red}{项目编号:S042,文末获取源码。} 项目编号:S042,文末获取源码。 目录 一、摘要1.1 项目介绍1.2 源码 & 项目录屏 二、功能模块三、开发背景四、系统展示五…...

【数据库设计和SQL基础语法】--数据库设计基础--数据建模与ER图
一、数据建模的基本概念 1.1. 数据模型的概念 数据模型是对现实世界中事物及其之间关系的一种抽象表示。它提供了描述数据结构、数据操作、数据约束等的方式,是数据库设计的基础。数据模型帮助我们理解数据之间的关系,提供了一种规范化的方式来组织和存…...

Vue3 设置点击后滚动条移动到固定的位置
需求: 点击不通过按钮,显示红框中表单,且滚动条滚动到底部 (显示红框中表单默认不显示) <el-button click"onApprovalPass">不通过</el-button> <div class"item" v-if"app…...

外部 prometheus监控k8s集群资源(pod、CPU、service、namespace、deployment等)
prometheus监控k8s集群资源 一,通过CADvisior 监控pod的资源状态1.1 授权外边用户可以访问prometheus接口。1.2 获取token保存1.3 配置prometheus.yml 启动并查看状态1.4 Grafana 导入仪表盘 二,通过kube-state-metrics 监控k8s资源状态2.1 部署 kube-st…...
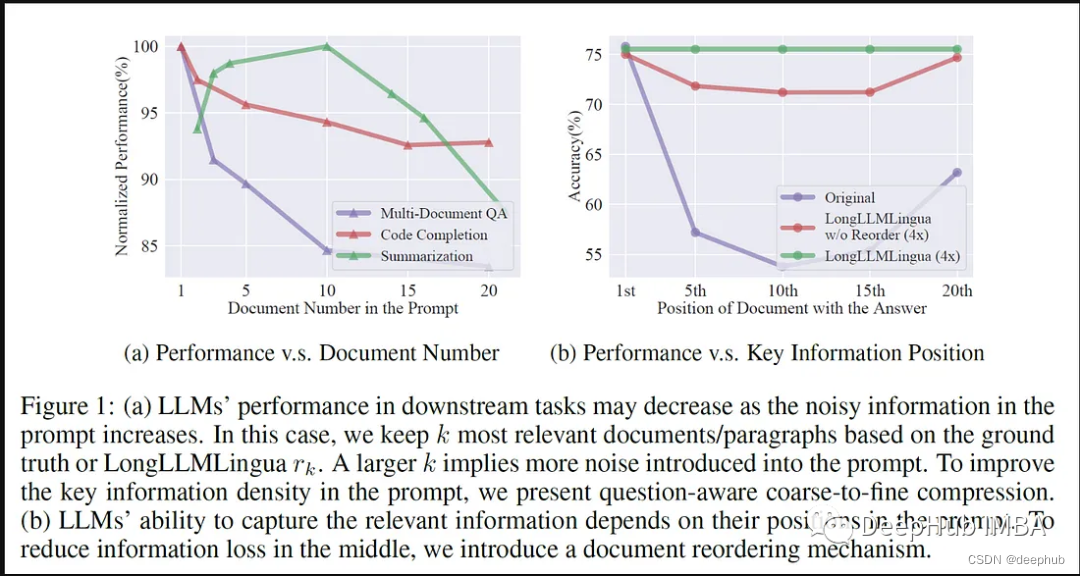
LLMLingua:集成LlamaIndex,对提示进行压缩,提供大语言模型的高效推理
大型语言模型(llm)的出现刺激了多个领域的创新。但是在思维链(CoT)提示和情境学习(ICL)等策略的驱动下,提示的复杂性不断增加,这给计算带来了挑战。这些冗长的提示需要大量的资源来进行推理,因此需要高效的解决方案,本文将介绍LLM…...

数据资产确权的难点
数据是企业的重要资产之一,但是许多企业对于这项资产在管理上都面临着一些挑战,其中最关键就是数据确权的问题。接下来,将探讨数据资产确权的难点,并提出相应的解决方案,一起来看吧。 首先介绍一下数据资产入表的背景以…...
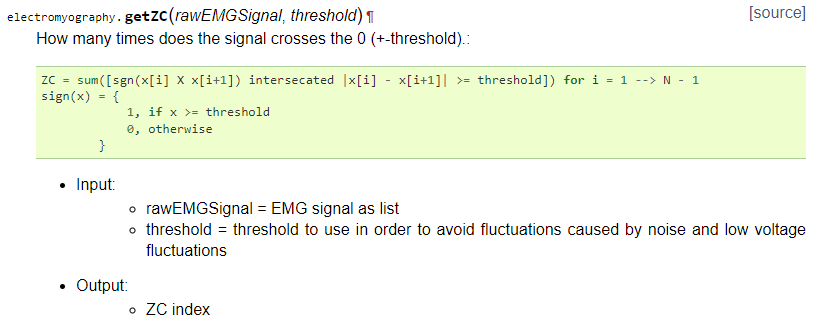
EMG肌肉电信号处理合集(二)
本文主要展示常见的肌电信号特征的提取说明。使用python 环境下的Pysiology计算库。 目录 1 肌电信号第一次burst的振幅, getAFP 函数 2 肌电信号波长的标准差计算,getDASDV函数 3 肌电信号功率谱频率比例,getFR函数 4 肌电信号直方图…...

2023亚马逊云科技re:Invent引领科技新潮流:云计算与生成式AI共塑未来
2023亚马逊云科技re:Invent引领科技新潮流:云计算与生成式AI共塑未来 历年来,亚马逊云科技re:Invent,不仅是全球云计算从业者的年度狂欢,更是全球云计算领域每年创新发布的关键节点。 2023年亚马逊云科技re:Invent大会在美国拉斯…...
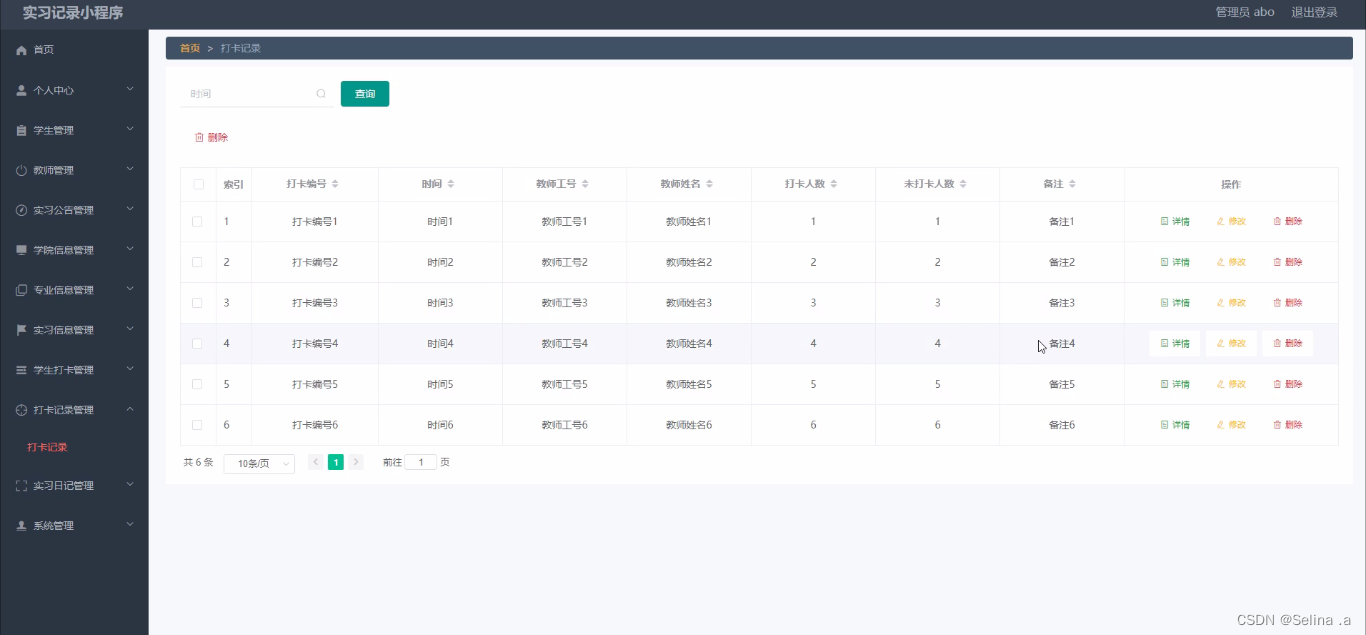
案例018:基于微信小程序的实习记录系统
文末获取源码 开发语言:Java 框架:SSM JDK版本:JDK1.8 数据库:mysql 5.7 开发软件:eclipse/myeclipse/idea Maven包:Maven3.5.4 小程序框架:uniapp 小程序开发软件:HBuilder X 小程序…...

视频剪辑技巧:如何高效批量转码MP4视频为MOV格式
在视频剪辑的过程中,经常会遇到将MP4视频转码为MOV格式的情况。这不仅可以更好地编辑视频,还可以提升视频的播放质量和兼容性。对于大量视频文件的转码操作,如何高效地完成批量转码呢?现在一起来看看云炫AI智剪如何智能转码&#…...

node.js获取unsplash图片
1. 在Unsplash的开发者页面注册并创建一个应用程序,以便获取一个API访问密钥(即Access Key)。 2. 安装axios: npm install axios3. 使用获取到的API密钥进行请求。 示例代码如下: const axios require(axios);con…...

Git远程库操作(GitHub)
GitHub 网址:https://github.com/ 创建远程仓库 远程仓库操作 命令名称作用git remote -v查看当前所有远程地址别名git remote add 别名 远程地址起别名git push 别名 分支推送本地分支上的内容到远程仓库git clone 远程地址将远程仓库的内容克隆到本地git pull 别…...
java计算下一个整10分钟时间点
最近工作上遇到需要固定在整10分钟一个周期调度某个任务,所以需要这样一个功能,记录下 package org.example;import com.google.gson.Gson; import org.apache.commons.lang3.time.DateUtils;import java.io.InputStream; import java.util.Calendar; i…...

力扣刷题篇之排序算法
系列文章目录 前言 本系列是个人力扣刷题汇总,本文是排序算法。刷题顺序按照[力扣刷题攻略] Re:从零开始的力扣刷题生活 - 力扣(LeetCode) 这个之前写的左神的课程笔记里也有: 左程云算法与数据结构代码汇总之排序&am…...

避坑指南:PyTorch F.interpolate里align_corners参数到底怎么设?附对比图
深度解析PyTorch插值操作:align_corners参数实战指南 在计算机视觉和深度学习领域,张量的空间维度变换是最基础却最容易出错的环节之一。许多开发者在初次接触PyTorch的F.interpolate函数时,往往会被align_corners这个看似简单的布尔参数困扰…...
到精准时序:单片机延时背后的时钟周期全解析)
从_nop_()到精准时序:单片机延时背后的时钟周期全解析
1. 从_nop_()说起:单片机延时的第一课 第一次在51单片机上用I2C驱动OLED屏幕时,我对着示波器调试了整整两天。原本以为简单的_nop_()延时,实际波形却总是飘忽不定。这个看似简单的空操作指令,背后藏着单片机时序控制的大学问。 no…...

实战指南:Parse12306 自动化获取全国高速列车数据的3大核心技术解析
实战指南:Parse12306 自动化获取全国高速列车数据的3大核心技术解析 【免费下载链接】Parse12306 分析12306 获取全国列车数据 项目地址: https://gitcode.com/gh_mirrors/pa/Parse12306 Parse12306作为一款高效的开源工具,为开发者和数据分析师提…...

魔兽争霸3终极优化指南:5分钟让经典游戏在现代电脑上完美运行
魔兽争霸3终极优化指南:5分钟让经典游戏在现代电脑上完美运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在现代电脑上…...

Windows PDF处理神器:Poppler零依赖安装指南
Windows PDF处理神器:Poppler零依赖安装指南 【免费下载链接】poppler-windows Download Poppler binaries packaged for Windows with dependencies 项目地址: https://gitcode.com/gh_mirrors/po/poppler-windows 还在为Windows系统上的PDF处理工具安装繁琐…...

LLM Wiki + Research Skill Graph + Obsidian 从零构建你的个人知识库和研究引擎
2026年4月3日,安德烈卡帕西(OpenAI联合创始人、特斯拉前人工智能主管,也是“氛围编程”一词的创造者)发布了一条标题为“大语言模型知识库”的推文,讲述了他如今如何利用大语言模型构建个人知识维基,而非仅…...

用ILA抓波形:手把手调试XC7K325T的XDMA PCIe AXI总线读写时序
用ILA抓波形:手把手调试XC7K325T的XDMA PCIe AXI总线读写时序 在FPGA开发中,PCIe接口与AXI总线的交互调试往往是项目成败的关键节点。当XDMA IP核与AXI总线握手出现问题时,传统的软件调试手段往往力不从心,这时就需要搬出硬件调试…...

2026工程基建与零基础跑通篇:YOLO26断点续训全攻略:服务器意外宕机后如何无损恢复训练状态?
写在前面:当你看着终端发呆的那一刻 你是否经历过这样的场景:深夜11点,训练已经跑了157个epoch,loss曲线正稳步下降,你泡好咖啡准备再盯一会儿——突然,屏幕一闪,服务器连接中断。你疯狂地ping IP、查看云端控制台,最后确认:GPU服务器宕机了。看着终端最后一行日志,…...

2026 AI安全左移再进化:从IDE插件到CI门禁,悬镜灵境AIDR的全流程集成实践
摘要“安全左移”已提出多年,但在AI智能体开发场景下面临全新挑战。智能体的“源码”不仅包括代码,还包括提示词、模型依赖和工具定义。传统SAST/DAST无法理解这些新型资产。本文基于悬镜灵境AIDR在IDE插件、CI流水线、运行时护栏三个环节的集成实践&…...
华为SDBE领先模型闭环战略管理的全面解析(附下载方式))
(90页PPT)华为SDBE领先模型闭环战略管理的全面解析(附下载方式)
篇幅所限,本文只提供部分资料内容,完整资料请看下面链接 https://download.csdn.net/download/AI_data_cloud/89624134 资料解读:(90 页 PPT)华为 SDBE 领先模型闭环战略管理的全面解析 详细资料请看本解读文章的最…...