基于ROS开发的开源项目
基于ROS (Robot Operating System) 开发的开源项目很多,其中一些已经在机器人领域内非常知名。以下是一些比较著名的例子:
-
Autoware: Autoware 是一个开源的自动驾驶车辆的软件栈,提供了从3D地图表示、环境感知(如障碍物、行人检测)、定位和地图构建、路径规划到车辆控制等功能的实现。
-
MoveIt!: 是用于机器人运动规划的ROS包的集合,它提供了运动规划、操作、3D感知、运动学、碰撞检测等功能。
-
Gazebo: 虽然不是一个ROS项目,但是Gazebo模拟器经常与ROS集成使用,用于各种机器人和传感器的3D模拟。它允许开发者测试机器人应用程序在物理世界中的性能而无需实际构建机器人。
-
TurtleBot: TurtleBot 是一个低成本的,从教育到研究的入门级移动机器人平台。ROS有提供适用于TurtleBot的软件包和工具。
-
PR2 (Personal Robot 2): PR2 是由Willow Garage开发的一个超灵活的机器人平台,也是ROS核心开发过程中使用的机器人之一。它在研究机构中应用广泛,ROS社区为其提供了大量的包和程序。
-
ROS-Industrial: 针对工业应用,ROS-Industrial项目旨在将ROS的高级功能扩展到工业应用场合,包括与工业机器人、自动化设备集成、工业界面等的集成。
-
PX4/Ardupilot:虽然PX4和Ardupilot是两个独立的无人机飞控项目,但它们可以与ROS进行集成,这样的集成提供了从仿真到实际飞行测试的无缝过渡,是无人机研究和开发领域的重要工具。
-
OpenCV: OpenCV本身是一个独立的计算机视觉库,但其与ROS的集成使得ROS能够利用OpenCV进行各种图像处理和视觉识别任务。
以上项目反映了ROS作为开放源代码的机器人软件平台的多功能性和灵活性。这些项目范围从个人和学术研究到商业和工业应用都有涉及。此外,还有成千上万的小型项目和包被开发出来为特定目的服务。随着ROS 2的发布和开发,这个生态系统还在不断扩张和升级。
让我们来深入了解 Autoware、MoveIt! 和 ROS Navigation Stack 这三个项目。
-
Autoware
- 历史: Autoware 是第一个开源的自动驾驶软件。它始于2015年,由日本的一个研究团队在名古屋大学启动。
- 特点: Autoware 基于 ROS,提供了从感知到控制的完整自动驾驶软件栈,包括但不限于定位、映射、路径规划、和车辆控制。
- 应用领域: 主要用于商业和研究目的上的自动驾驶汽车和移动机器人。
- 市场份额: 在自动驾驶研究社区中有较高的知名度和使用率,但具体的市场份额很难量化。
- 发展情况: Autoware Foundation 成立以维护和推动该项目的发展,它已经成为一个国际合作项目,推动自动驾驶车辆的商业化。
-
MoveIt!
- 历史: MoveIt! 最初于2013年发布,是一个为机器人进行运动规划、操作、3D感知、运动学、控制和导航的软件。
- 特点: 它提供了一个用户友好的接口,与ROS密切集成,广泛用于研究和工业应用中。
- 应用领域: 主要用于机器人领域,特别是那些需要复杂运动规划和执行的机器人系统。
- 市场份额: 在工业和研究机器人社区中流行,并被多个商业机器人操作系统作为标准的运动规划框架集成。
- 发展情况: MoveIt! 持续进行升级和优化,拥有一个活跃的开发者社区,不断添加新功能并提高性能。
-
ROS Navigation Stack
- 历史: 作为ROS项目中的核心堆栈之一,ROS Navigation Stack 自ROS发布以来一直存在。
- 特点: 包括一系列用于2D地图导航的工具和库,支持路径规划、避障、区域地图构建等。
- 应用领域: 该堆栈主要应用于移动机器人,特别是在室内环境中执行任务的服务和研究机器人。
- 市场份额: 它是移动机器人行业内使用最为广泛的导航框架之一,几乎成了事实上的标准。
- 发展情况: ROS社区不断更新ROS Navigation Stack,确保其满足现代机器人导航的要求。随着ROS 2的发布,该框架也在逐渐迁移到更新的ROS版本以提供更好的性能和可靠性。
除了 Autoware、MoveIt!、ROS Navigation Stack,基于 ROS 的自动化驾驶和机器人导航有一些其他的项目和框架,但请注意,并非所有这些项目都专注于自动驾驶车辆,有的是更加偏向于机器人的通用导航和控制。下面是一些较为知名的例子:
-
MRPT (Mobile Robot Programming Toolkit)
- 历史: MRPT 开始于2004年,是在国际上广泛使用的开源C++库集合,主要用于移动机器人的研究。
- 特点: 它提供了用于定位、映射和视觉导航的工具,并且它的算法效率高,适合进行快速原型开发。
- 应用领域: 主要用于机器人研究领域,尤其是在SLAM(同步定位与映射)算法和机器人感知方面。
- 市场份额: 在学术界和研究机构中应用较多,但具体市场份额不易量化。
- 发展情况: MRPT持续更新维护中,经过多年的演化,它已经包含了丰富的功能模块。
-
Apollo (Baidu Apollo)
- 历史: 由百度于2017年启动,Apollo 是一个开放的、完整的、安全的自动驾驶平台。
- 特点: 它包含了一个完整的硬件和软件服务系统,支持完全的车辆自动化。
- 应用领域: 专注于自动驾驶汽车,广泛用于商业化自动驾驶解决方案。
- 市场份额: 在中国和逐步在全球范围内有较多的合作伙伴,与众多汽车厂商有合作。
- 发展情况: Apollo 经过多次升级,迭代速度快,已经具备了高水平的自动驾驶功能,并在部分地区进行了路测和商业化尝试。
-
ADAS (Advanced Driver-Assistance Systems)
- 历史: ADAS不是一个具体的框架,而是指一系列支持驾驶辅助的系统和技术。
- 特点: 包括了众多不同的系统,如自适应巡航控制、车道保持辅助、自动紧急刹车等。
- 应用领域: 主要应用于现代汽车,为驾驶者提供安全和便利的辅助功能。
- 市场份额: ADAS系统在新车中的采用率日益增加,几乎所有主要汽车厂商都提供了至少基础的ADAS功能。
- 发展情况: ADAS系统正逐步朝向更高级的自动化水平发展,不断集成更多先进技术,如机器学习和人工智能。
-
CARLA (Car Learning to Act)
- 历史: CARLA是一个开源的仿真平台,用于支持自动驾驶研究。
- 特点: CARLA提供了复杂的城市环境和天气情况模拟,支持软件在环测试和传感器数据集成。
- 应用领域: 主要用于自动驾驶系统的研究和学术界。
- 市场份额: 主要在研究社区中使用,没有直接的市场份额。
- 发展情况: CARLA持续更新和发展中,它是自动驾驶研究领域使用广泛的模拟平台之一。
注意,Apollo 虽然可以与 ROS 集成,但是它本身是一个独立的自动驾驶平台,它有自己的软件体系结构,并不限于 ROS。
相关文章:

基于ROS开发的开源项目
基于ROS (Robot Operating System) 开发的开源项目很多,其中一些已经在机器人领域内非常知名。以下是一些比较著名的例子: Autoware: Autoware 是一个开源的自动驾驶车辆的软件栈,提供了从3D地图表示、环境感知(如障碍物、行人检测…...
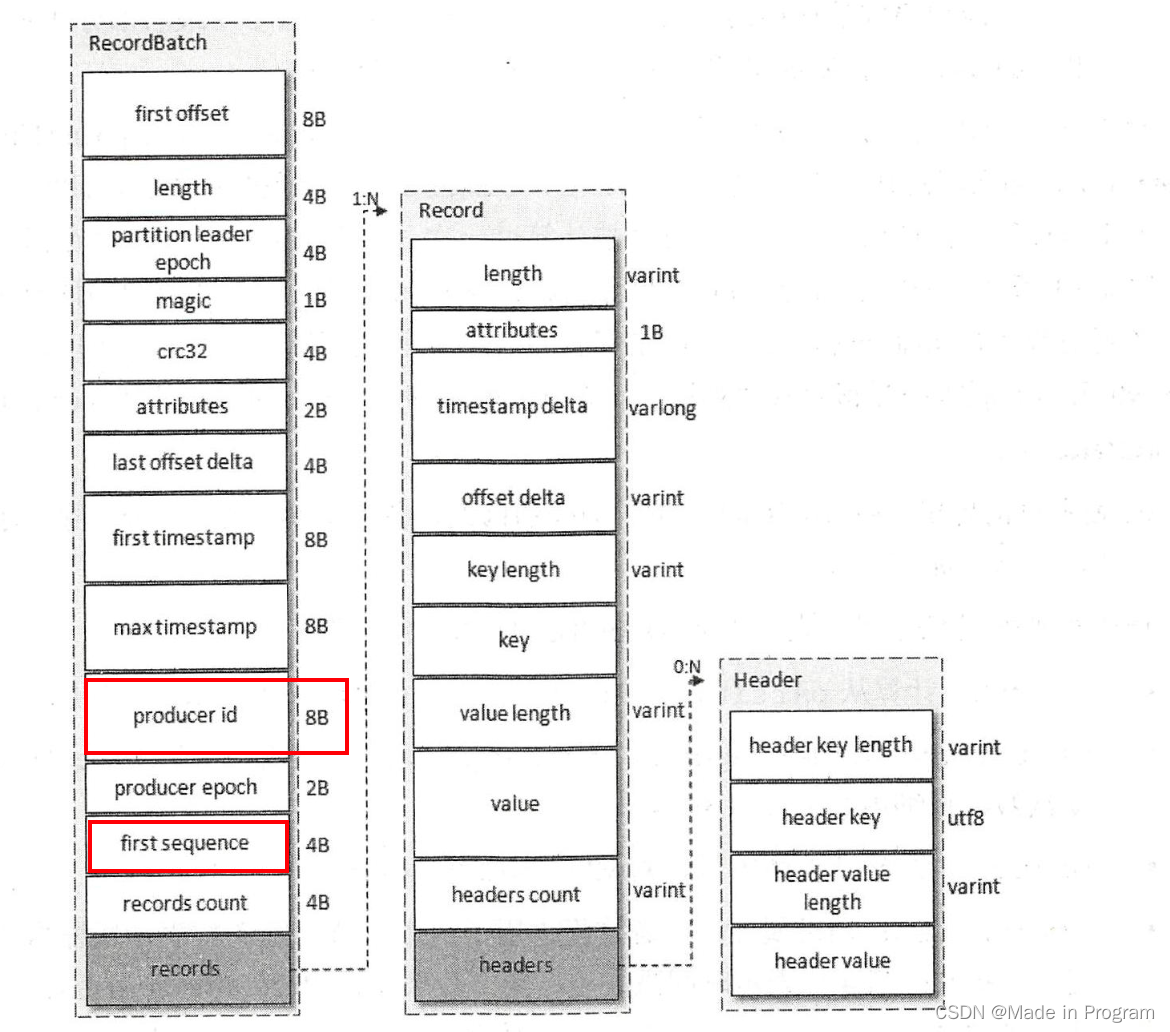
kafka精准一次、事务、幂等性
Kafka事务 消息中间件的消息保障的3个级别 At most once 至多一次。数据丢失。At last once 至少一次。数据冗余Exactly one 精准一次。好!!! 如何区分只要盯准提交位移、消费消息这两个动作的时机就可以了。 当:先消费消息、…...
centos 7.9 下利用miniconda里的pyinstaller打包python程序为二进制文件操作方法
centos 7.9 下利用miniconda里的pyinstaller打包python程序为二进制文件操作方法 一.centos 7.9 操作系统安装 参考:https://blog.csdn.net/qq_46015509/article/details/134572030?utm_sourceminiapp_weixin 安装完成后用后台连接工具连上虚拟机 二.安装python3 …...
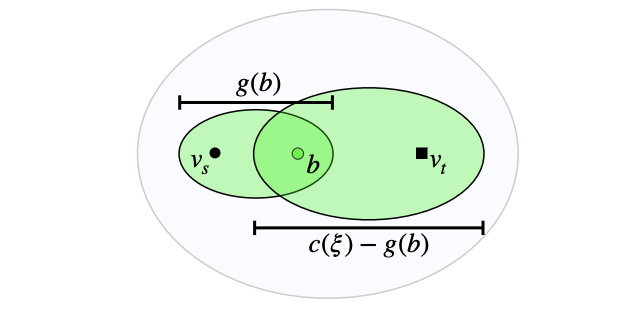
Motion Plan之基于采样的路径规划算法笔记
Motion Plan之搜索算法笔记 背景: 基于采样算法是一种在路径规划中广泛应用的有效方法。它通过在图中随机选择点来生成一个简化的搜索图,从而加速搜索过程。这种方法的主要优点包括减少内存使用,避免计算错误,具有动态障碍物对抗…...

idea里面常用插件
这里列出了一系列常用的 IntelliJ IDEA 插件,它们可以提高开发效率、简化操作,以及帮助进行代码分析和优化。以下是每个插件的简要介绍: GenerateAllSetter:生成对象的所有 set 方法和 get 方法,方便对象之间的转换。该…...

回归算法优化过程推导
假设存在一个数据集,包含工资、年龄及贷款额度三个维度的数据。我们需要根据这个数据集进行建模,从而在给定工资和年龄的情况下,实现对贷款额度的预测。其中,工资和年龄是模型构建时的两个特征,额度是模型输出的目标值…...

某高品质房产企业:借助NineData平台,统一数据库访问权限,保障业务安全
该企业是中国领先的优质房产品开发及生活综合服务供应商。在 2022 年取得了亮眼的业绩表现,销售额市场占有率跻身全国前五。业务涵盖房产开发、房产代建、城市更新、科技装修等多个领域。 2023 年,该企业和玖章算术(浙江)科技有限…...
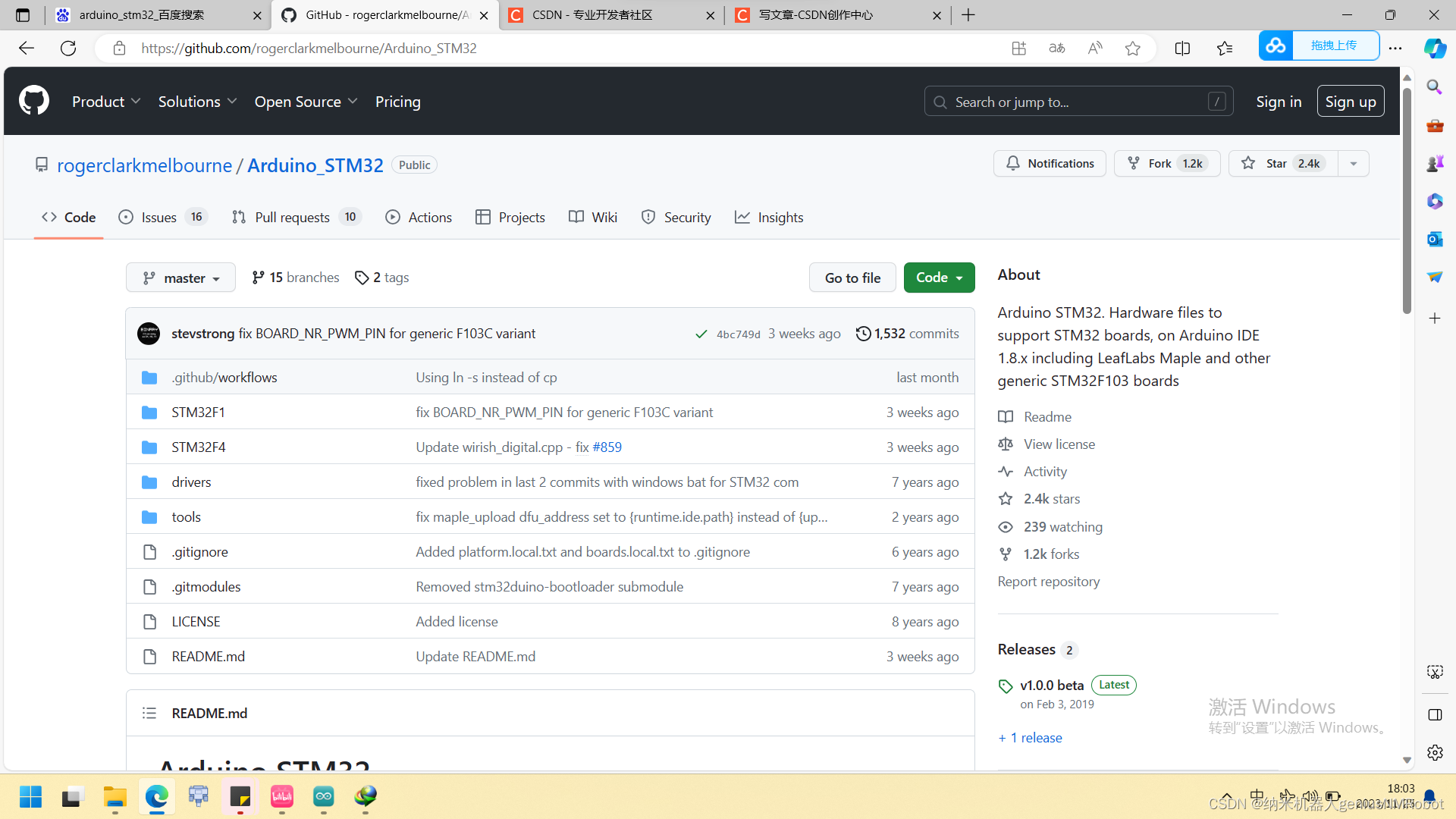
Arduio开发STM32所面临的风险
据说micro_ros用到了arduino,然后用arduino搞stm32需要用到这个Arduino STM32的东西,然后这里申明了:这些代码没有经过严格测试,如果是向心脏起搏器,自动驾驶这样要求严格的的情况下,这个东西不能保证100%不发生问题&a…...

精准人脉引流软件的开发流程与涉及到的技术
一、精准人脉引流软件的开发流程 1. 确定需求:首先,我们需要明确软件的需求,包括目标用户、功能需求、性能需求等。这些需求将直接影响到软件的开发方向和最终效果。 2. 系统设计:根据需求,进行系统设计,…...

Mysql数据库 20.DCL数据控制语言
因这类SQL语言开发人员操作较少,主要是数据库管理员(DBA)使用,所以前文没有提及,这篇文章进行补充说明 DCL数据控制语言 用来管理数据库用户,控制数据库的访问权限 1.管理用户 1.1 查询用户 select * f…...

使用CMake交叉编译Arm Linux程序
下载安装aarch64-linux-gnu-gcc arm交叉编译工具链 apt-get install aarch64-linux-gnu-gccapt-get install aarch64-linux-gnu-gcc创建编译目录构建makefle 注意,工具链文件的指定一定要紧跟cmake命令之后,不能放到 … 后面构建arm架构cmake mkdir arm…...
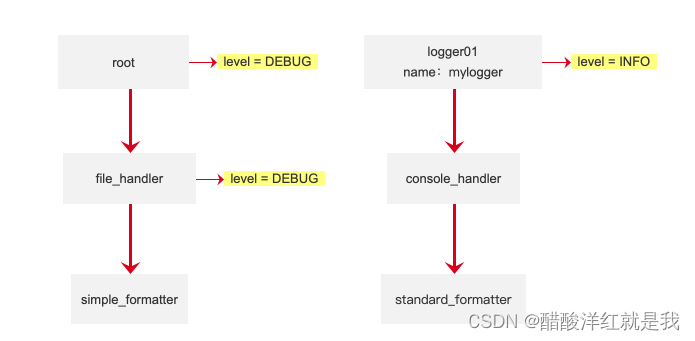
训练日志——logging
目录 基础使用日志的6个级别打印日志修改打印级别 高级应用logging的组成记录器Loggers处理器Handlers过滤器Filterformatter格式创建关联打印日志 配置文件参考 基础使用 日志的6个级别 打印日志 import logginglogging.debug(调试日志) logging.info(消息日志) logging.war…...
尺度为什么是sigma?
我们先看中值滤波和均值滤波。 以前,我认为是一样的,没有区分过。 他们说,均值滤波有使图像模糊的效果。 中值滤波有使图像去椒盐的效果。为什么不同呢?试了一下,果然不同,然后追踪了一下定义。 12345&…...
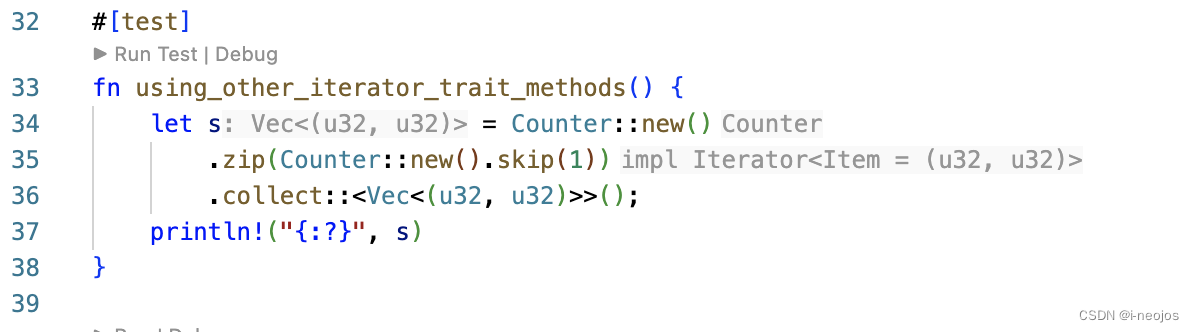
迭代器模式
自定义 Counter 结构体类型,并实现迭代器。其他语言的场景,读取数据库行数据时,使用的就是迭代器。我们使用for语言遍历数组,也是一种迭代。 结构体对象实现 Iterator trait,创建自定义的迭代器,只需要实现…...

C++ 修饰符、存储类、运算符、循环、判断
一、C修饰符类型: C允许在char、int、double数据类型前放置修饰符。 数据类型修饰符: ◆ signed:表示变量可以存储负数。对于整型变量来说,signed 可以省略,因为整型变量默认为有符号类型。 ◆ unsigned࿱…...
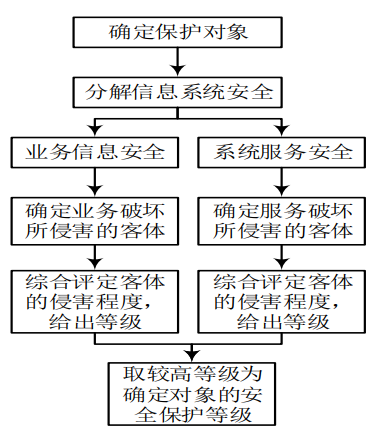
2023 hnust 湖南科技大学 信息安全管理课程 期中考试 复习资料
前言 ※老师没画重点的补充内容★往年试卷中多次出现或老师提过的,很可能考该笔记是奔着及格线去的,不是奔着90由于没有听过课,部分知识点不一定全,答案不一定完全正确 题型 试卷有很多题是原题 判断题(PPTÿ…...
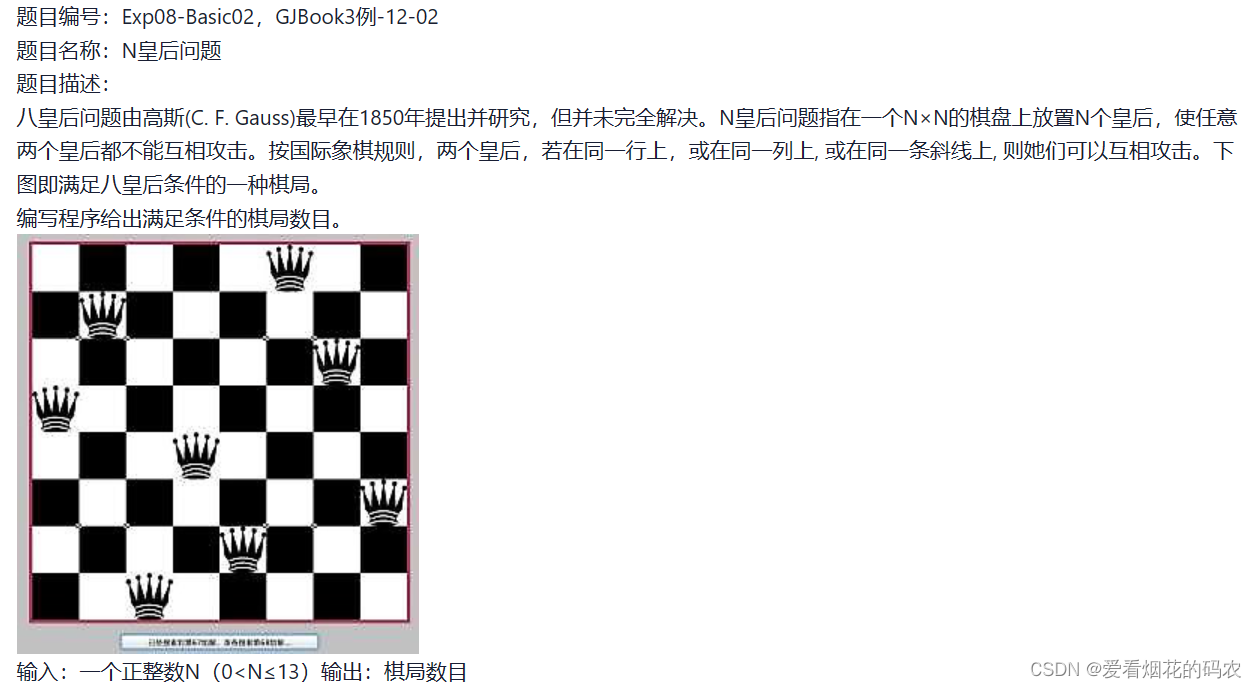
N皇后问题解的个数
暴力递归 #include <stdio.h>int count0,a[15],flag; void queen(int,int); int main(){int n;scanf("%d",&n);queen(n,n);printf("%d",count); } void queen(int n,int n0){if(n<1){flag1;for(int i1;i<n0;i){for(int j1;j<n0;j){if(…...

php订单发起退款(余额和微信支付)
index.html <a class="btn btn-danger btn-change btn-tuikuan btn-disabled" href="javascript:;"><i class="fa fa-tuikuan"></i> 订单退款</a>-->order.js // 为表格绑定事件Table.api.bindevent(table);//退款…...
【SpringCloud】认识微服务、服务拆分以及远程调用
SpringCloud 1.认识微服务 1.1单体架构 单体架构:将业务的所有功能集中在一个项目中开发,打成一个包部署 单体架构的优缺点: 优点: 架构简单,部署成本低 缺点: 耦合度高(维护困难&#x…...
Mysql基础操作(命令行)
文章目录 Mysql基础操作(命令行)背景创建数据库选择数据库查看所有表查看表结构向表插入数据插入第一条插入第二条插入第三条 查询表数据修改表数据删除表数据 Mysql基础操作(命令行) 背景 docker安装mysql8,映射本地…...

Office安装新姿势:不会写XML?用官方配置网站5分钟搞定ODT安装文件
Office 2021极简安装指南:告别XML恐惧,官方工具5分钟搞定 每次看到命令行窗口弹出,手指就不自觉地悬在键盘上方犹豫不决?面对满屏尖括号和属性的XML配置文件,感觉像在读天书?作为常年与Office打交道的技术…...

Mapbox踩坑实录:图层叠加、图片更新、弹窗样式,这些坑我帮你填平了
Mapbox实战避坑指南:图层管理、动态图片与弹窗优化 第一次在项目中集成Mapbox时,那种兴奋感很快被各种意想不到的报错消磨殆尽。记得凌晨三点调试updateImage方法时,控制台不断抛出"Image dimensions must match"的错误——原来只是…...

从Arm实战案例看STL:你的软件测试库真的测对了CPU的“死角”吗?
从Arm实战案例看STL:你的软件测试库真的测对了CPU的“死角”吗? 在汽车电子和工业控制领域,功能安全从来不是可选项,而是生死攸关的底线。当工程师们谈论ASIL B认证时,很少有人意识到,那些看似严谨的软件测…...

Axios拦截器里的小秘密:如何自动处理POST请求的JSON/FormData格式转换?
Axios拦截器实战:智能切换JSON与FormData的工程化解决方案 在前后端分离架构中,数据格式的差异常常成为联调阶段的痛点。当某个接口要求application/json而另一个却需要multipart/form-data时,开发者往往需要手动处理这些细节。这不仅增加了代…...

5分钟快速上手:Windows平台APK安装器完整指南
5分钟快速上手:Windows平台APK安装器完整指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否想在Windows电脑上直接运行安卓应用,却不想…...
)
ACADOS实战:用Python给全向移动小车做个MPC控制器(附避坑指南)
ACADOS实战:用Python给全向移动小车做个MPC控制器(附避坑指南) 在机器人控制领域,模型预测控制(MPC)因其优秀的处理约束能力和动态响应特性,已成为移动机器人轨迹规划的首选方案。传统工具如Cas…...
)
从零开始:在Ubuntu 22.04上编译安装Yosys(含Tabby CAD Suite配置避坑指南)
从零构建:Ubuntu 22.04下Yosys全栈开发环境实战指南 当Verilog代码在屏幕上流淌成电路结构的那一刻,每个数字电路工程师都会感受到综合工具的神奇魅力。Yosys作为开源EDA领域的瑞士军刀,正以灵活的架构和可扩展性重塑RTL设计流程。本文将带你…...

云容笔谈·东方红颜影像生成系统STM32项目联动展示:物联网设备触发个性化图像生成
云容笔谈东方红颜影像生成系统STM32项目联动展示:物联网设备触发个性化图像生成 最近我捣鼓了一个挺有意思的小项目,把一块STM32开发板和AI图像生成模型给连起来了。简单来说,就是让硬件设备能“感知”周围的环境,然后根据这些数…...

RexUniNLU多场景验证:在微博短文本、论文长段落、公文正式语体中稳定表现
RexUniNLU多场景验证:在微博短文本、论文长段落、公文正式语体中稳定表现 1. 引言:一个模型应对所有中文文本场景 在日常工作中,我们经常需要处理各种类型的中文文本:刷微博时的简短动态、阅读学术论文的长篇段落、撰写正式公文…...

KMS_VL_ALL_AIO深度解析:企业级Windows与Office智能激活最佳方案
KMS_VL_ALL_AIO深度解析:企业级Windows与Office智能激活最佳方案 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO KMS_VL_ALL_AIO是一款基于微软官方KMS技术的智能激活脚本࿰…...