单片机AT89C51直流电机控制电路PWM设计
wx供重浩:创享日记
对话框发送:直流电机
获取论文报告+源码源程序+原理图

此文将介绍一种直流电机,详细阐述了用单片机输出口所给占空比的不同实现电机的调速的设计方法;着重讨论L298用于电机驱动时特有的优势。直流电机调速具有相当的实际意义。依据其调速的基本理论,本电路由模拟电源、控制电路、显示电路、驱动电路四部分组成。准确说就是模拟电源提供各个芯片电源、数码管、驱动L298所需电压;显示电路用于显示电动机转动时的速度大小及正反转所表示的代码。与传统的电动机调速相比具有操作方便,以及其输出速度大小采用数码显示的特点。文章中介绍了Protel 99发展及特点。直流电动机的工作原理、基本组成环节,电路分析、特殊元器件简介,设计方案的提出,更进一步说明了这类电机的好处。
关键词:单片机AT89C51 ;驱动L298;555定时器;直流电机;
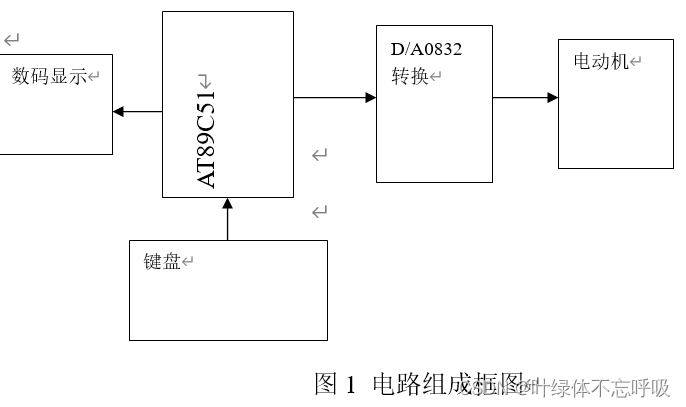
一、 系统的设计
1.1 方案论证与选择
方案一:通过电压的大小来控制电机的转动速度;根据电动机在其额定电压时,电动机有一定的额定转速。根据其输入电压的减小,其转动速度也相应的减小。从而在传统的改变电动机的转速问题中,就是利用所给电动机的电压的不同,而达到人们所需要的大约速度。
方案二:以单片机AT89C51为中心通过D/A转换器,将单片机数字量转换为模拟量,从而起到控制电动机的转速问题。其中在单片机控制部分通过按键直接从程序中调出所需要速度的值,同时输到数码显示部分和D/A转换部分以实现电动机的调速。该电路最大的缺点是不能及时的从电动机那里得到相应的转动速度,而是直接从程序哪儿调用相应的数值给数码显示。所以,此处的电路在速度的显示上失去了其真实性。
方案三:采用AT89C51单片机进行控制。本设计需要使用的软件资源比较简单,只需要完成红外线采样部分、键盘控制部分以及显示输出功能。采用AT89C51进行控制比较简单、易控制、可靠性高、抗干扰能力强、精度高且体积大大减小。输出速度的调节是通过k5键操作,显示速度在最高速度、最低速度的中间即800转每分钟。显示速度一步到位,没有传统的粗调与细调之累赘,并且使用方便等优点。AT89C51是一种带4K字节闪烁可编程可擦除只读存储器的低电压,高性能CMOS8位微处理器.具有4K字节可编程闪烁存储器,可擦除的的只读存储器(PEROM), ATMEL的AT89C51是一种高效微控制器. AT89C51单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案. 三级程序存储器锁定、128*8位内部RAM、32可编程I/O线、两个16位定时器/计数器、5个中断源、可编程串行通道、低功耗的闲置和 电模式、片内振荡器和时钟电路:
电路框图2如下
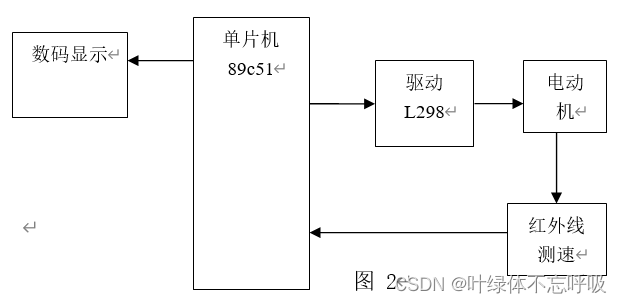
鉴于上面分析,方案一只能自以为减小所给电压值而能使电动机的转速有相应的减小。方案二只是把理想的速度送到数码显示以表示当时电动机的转速,缺乏真实性。所以,设计采用方案三。
1.2:单元电路设计
(1)电压源设计与选择
方案一:采用电压源直接滤波法.缺点:此稳压电源产生纹波较大.
方案二:采用稳压芯片进行稳压.优点:此稳压电源较稳定,产生的纹波较小,有利于电路功能的实现
系统采用方案二
(2)显示电路的设计与选择
方案一:采用字符型LCD显示.
方案二:采用LED数码管显示.
系统采用方案二
(3)模拟电压源的放大电路设计与选择
方案一:采用集成运放TL084进行放大. 缺点:难以调节.
方案二:采用集成运放TL082进行放大. 优点:易调节,且不过于浪费.
系统采用方案二
(4)输出电路设计与选择
方案一:采用直接输出法.缺点:不能有效地保护电压源和用电器.
方案二:采用再次驱动稳压器和保护电路的输出法.优点:在用电器发生短路时,能够有效地保护用电器和电压源.
(5)电路的控制方式电路设计与选择
方案一:采用直接控制法.
方案二:采用步进和复位法.
系统采用方案二
二.实际电路设计
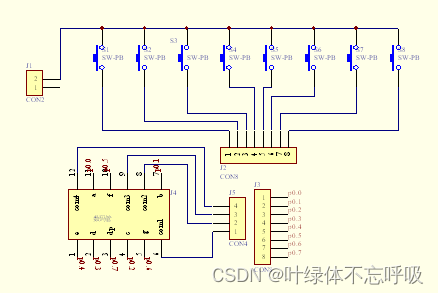
2.1原理图
根据方案2,得到如下实际原理图:
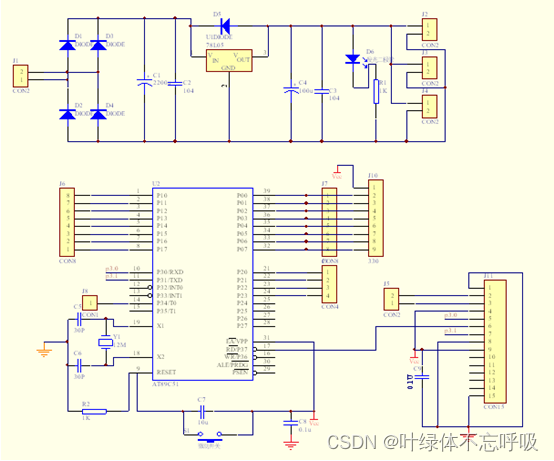
2.2工作原理与过程
通电复位,电路进入初始状态:LED数码管显示0000,待电路正常工作时,开始显示电动机的速度和正反转。按S3电动机速度向上增加,按S2电动机速度向下递减,按S1使电动机朝刚才相反的方向转动同时显示相应字样。由于在实际使用中经常用到的速度有1.5v、3v、4.5v,5v,6v,8v,12v等速度值,所以本电路还设置了几个按键,如按下S4,电机的速度直接跳转到速度为****,按下S5, 电机的速度直接跳转到速度为****,电机的速度直接跳转到速度为****,等。
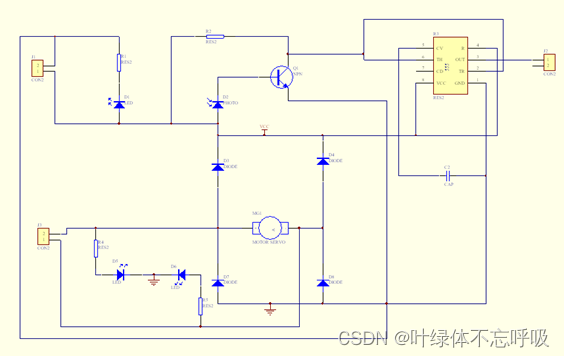
L298是具有15个引脚的单列直插式2位同时驱动芯片。其引脚功能分别为:1、8、15脚为GND引脚,2、3脚为输出引脚, 9脚为VSS引脚,4脚为VS引脚,5、7脚为输入引脚,6脚为选通1通道引脚。其余引脚为通道2所需要引脚,在此没有用到通道2,故其余引脚全部悬空。当6脚数据输入量为1时,1通道正常工作,当5、7脚输入为1、0时,2、3脚输出的电平使电动机正转,并且可以按照单片机所复给6脚的置1、置0的占空比的不同而使电动机的转速得以改变。当5、7脚输入为0、1时,2、3脚输出的电平使电动机反转,并且同理可以按照单片机所复给6脚的置1、置0的占空比的不同而使电动机的转速得以改变。
保护电路由二极管组成,由于电动机是呈电感性很强的,所以在开机或着关机时,会产生很大的感应电压而烧坏芯片,在此,为了保护驱动芯片,接了几个二极管,从而大大的减小了由于感应电压带给驱动芯片的危害。
2.3理论计算与主要芯片的说明与应用
2.3.1 主要芯片说明
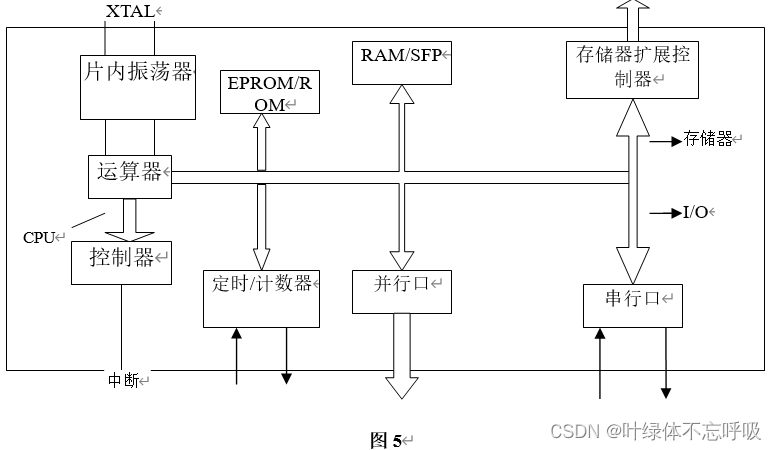
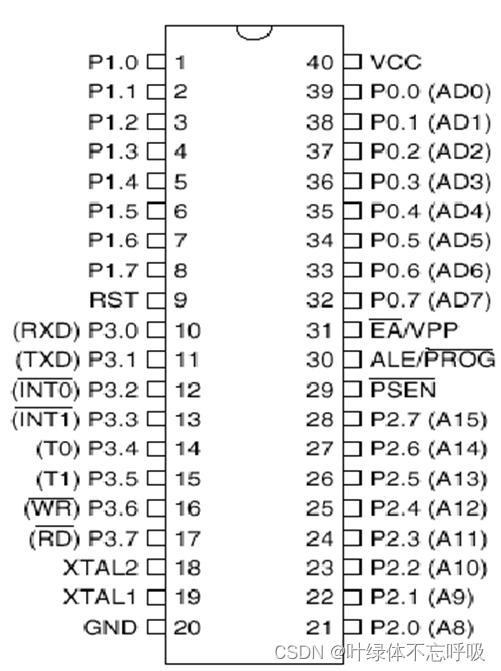
(1)单片机AT89C51
a:AT89C51的内部结构原理图见图5
主要特性:
·与AT89C2051 兼容
·4K字节可编程闪烁存储器
寿命:1000写/擦循环
数据保留时间:10年
·全静态工作:0Hz-24Hz
·三级程序存储器锁定
·128*8位内部RAM
·32可编程I/O线
·两个16位定时器/计数器
·5个中断源
·可编程串行通道
·片内振荡器和时钟电路
管脚说明:
VCC:供电电压。
GND:接地。
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门电流。当P1口的管脚第一次写1时,被定义为高阻输入。P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL门电流。P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。在FLASH编程和校验时,P1口作为第八位地址接收。
P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。并因此作为输入时,P2口的管脚被外部拉低,将输出电流。这是由于内部上拉的缘故。P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。P2口在FLASH编程和校验时接收高八位地址信号和控制信号。
P3口:P3口管脚是8个带内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这是由于上拉的缘故。
P3口也可作为AT89C51的一些特殊功能口,如下表所示:
口管脚 备选功能
P3.0 RXD(串行输入口)
P3.1 TXD(串行输出口)
P3.2 /INT0(外部中断0)
P3.3 /INT1(外部中断1)
P3.4 T0(记时器0外部输入)
P3.5 T1(记时器1外部输入)
P3.6 /WR(外部数据存储器写选通)
P3.7 /RD(外部数据存储器读选通)
P3口同时为闪烁编程和编程校验接收一些控制信号。
RST:复位输入。ALE/PROG:当访问外部存储器时,地址锁存允许的输出电平用于锁存地址的地位字节。在FLASH编程期间,此引脚用于输入编程脉冲。
/PSRN:外部程序存储器的选通号。 /EA/VPP:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器。
(其余完整详见下载!)
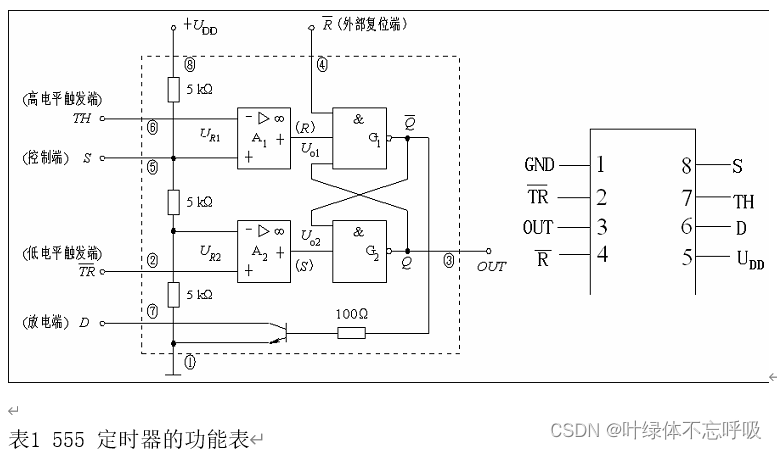
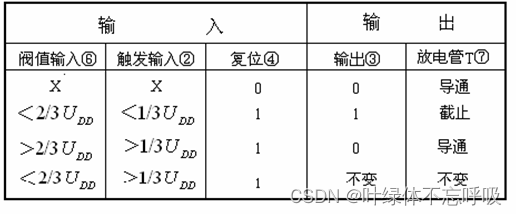
(3).555 定时器的工作原理
555 定时器原理图及引线排列如图1 所示。其功能见表1。定时器内部由比较器、分压电路、RS 触发器及放电三极管等组成。分压电路由三个5K 的电阻构
成,分别给1 A 和2 A 提供参考电平2/3 DD U 和1/3 DD U 。1 A 和2 A 的输出端控制RS触发器状态和放电管开关状态。当输入信号自6 脚输入大于2/3 DD U 时,触发器复位,3 脚输出为低电平,放电管T 导通;当输入信号自2 脚输入并低于1/3 DD U时,触发器置位,3 脚输出高电平,放电管截止。4 脚是复位端,当4 脚接入低电平时,则o U =0;正常工作时4 接为高电平。5 脚为控制端,平时输入2/3 DD U作为比较器的参考电平,当5 脚外接一个输入电压,即改变了比较器的参考电平,从而实现对输出的另一种控制。如果不在5 脚外加电压通常接0.01μF 电容到地,起滤波作用,以消除外来的干扰,确保参考电平的稳定。
2.3.2 关键电路单元的工程计算:(详见下载)
2.4软件设计与测试
(1)程序流程图
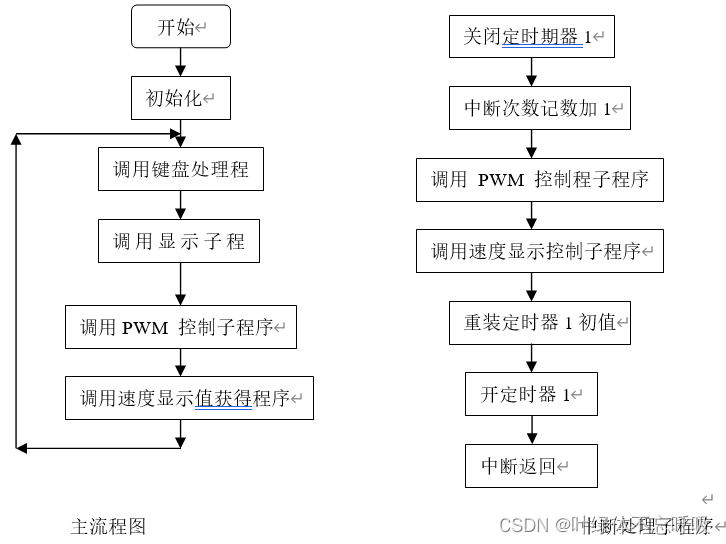
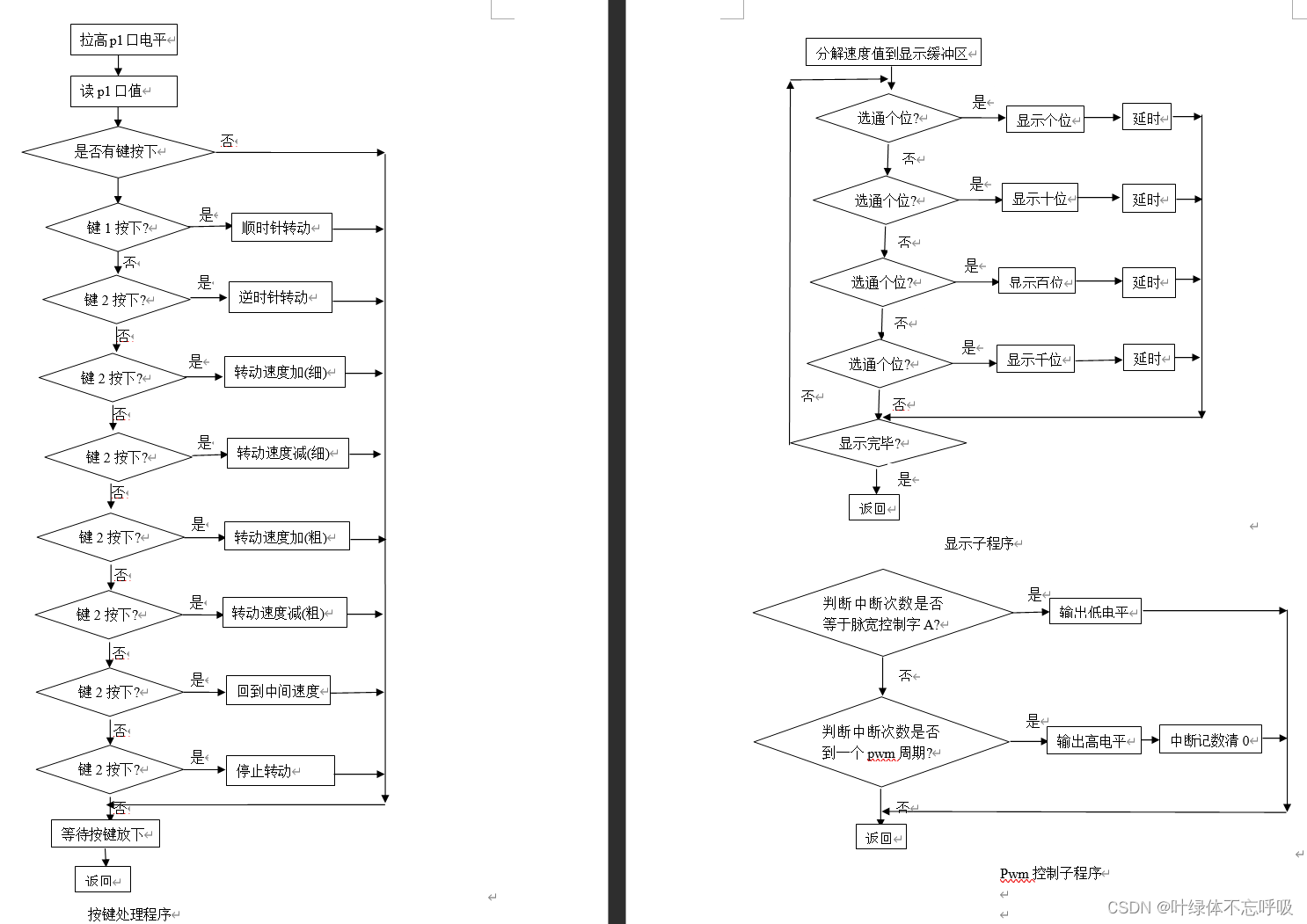
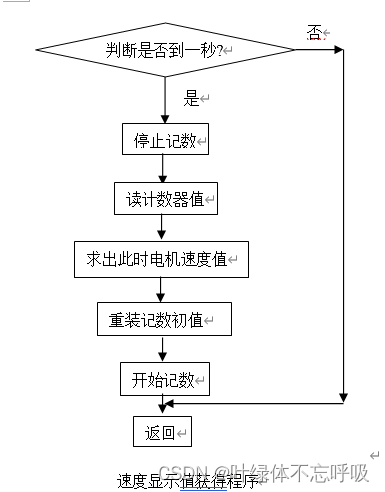
(其余完整详见下载!)
相关文章:
单片机AT89C51直流电机控制电路PWM设计
wx供重浩:创享日记 对话框发送:直流电机 获取论文报告源码源程序原理图 此文将介绍一种直流电机,详细阐述了用单片机输出口所给占空比的不同实现电机的调速的设计方法;着重讨论L298用于电机驱动时特有的优势。直流电机调速具有…...

Python面经【2】
一、赋值、浅拷贝和深拷贝的区别 赋值 在python中,对象的赋值就是简单的对象引用。 1. a [1,2,"hello",[python, C]]2. b a 在上述情况下,a和b是一样的,它们指向同一片内存,b不过是a的别名,是引用。 赋值…...
邮政快递查询,邮政快递单号查询,用表格导出查询好的物流信息
批量查询邮政快递单号的物流信息,以表格的形式导出查询好的物流信息。 所需工具: 一个【快递批量查询高手】软件 邮政快递单号若干 操作步骤: 步骤1:运行【快递批量查询高手】软件,并登录 步骤2:点击主界…...

【经典小练习】输出文件路径名
文章目录 🌹问题✨思路🍔代码🛸读取文件,并把文件名保存到文件中 对指定目录下的所有 Java 文件进行编译、打包等处理; 查找指定目录下所有包含特定字符串的 Java 文件; 统计指定目录下所有 Java 文件的行数…...
【Python】【Torch】神经网络中各层输出的特征图可视化详解和示例
本文对神经网络各层特征图可视化的过程进行运行示例,方便大家使用,有助于更好的理解深度学习的过程,尤其是每层的结果。 神经网络各层特征图可视化的好处和特点如下: 可视化过程可以了解网络对图像像素的权重分布,可…...
接口测试学习路线
接口测试分为两种: 测试外部接口:系统和外部系统之间的接口 如:电商网站:支付宝支付 测试内部接口:系统内部的模块之间的联调,或者子系统之间的数据交互 测试重点:测试接口参数传递的正确性&…...

蓝桥杯官网算法赛(蓝桥小课堂)
问题描述 蓝桥小课堂开课啦! 海伦公式(Herons formula),也称为海伦-秦九韶公式,是用于计算三角形面积的一种公式,它可以通过三条边的长度来确定三角形的面积,而无需知道三角形的高度。 海伦公…...
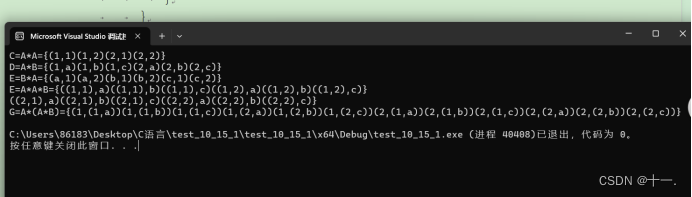
求集合的笛卡尔乘积
求集合的笛卡尔乘积 一:【实验目的】二:【实验内容】三:【实验原理】四:代码实现: 一:【实验目的】 通过编实现给定集合A和B的笛卡尔积CAA,DAB,EBA,FAAB,GA(A*B). 二:【实验内容】…...
Linux系统常用指令大全(图文详解)
目录 前言 一、UNIX的登录与退出 1、登录 (1)执行格式: (2)步骤 2、退出 二、UNIX命令格式 三、常用命令 1、目录操作 (1)显示目录文件 ls (2)建新目录 …...

基于PLC触摸屏控制的伺服电机绕线机
摘 要 绕线机是专供连续绕制多圈电位器绕阻的专用机床设备。本文介绍了采用 PLC作为主控制机器,触摸屏作为操作界面,步进电机、伺服电机驱动的绕线机系统。描述 了触摸屏的原理、分类和触摸屏人机界面的控制方式,完成了触摸屏人机界面设计。…...

1.8 C语言之参数传递
1.8 C语言之参数传递 一、参数传递 一、参数传递 在C语言中,所有的参数传递都是值传递,也就是说,传递给被调用函数的参数值存放在临时变量中,而不是存放在原来的变量中。这与其他语言的引用传递有所不同。在C语言中,被…...
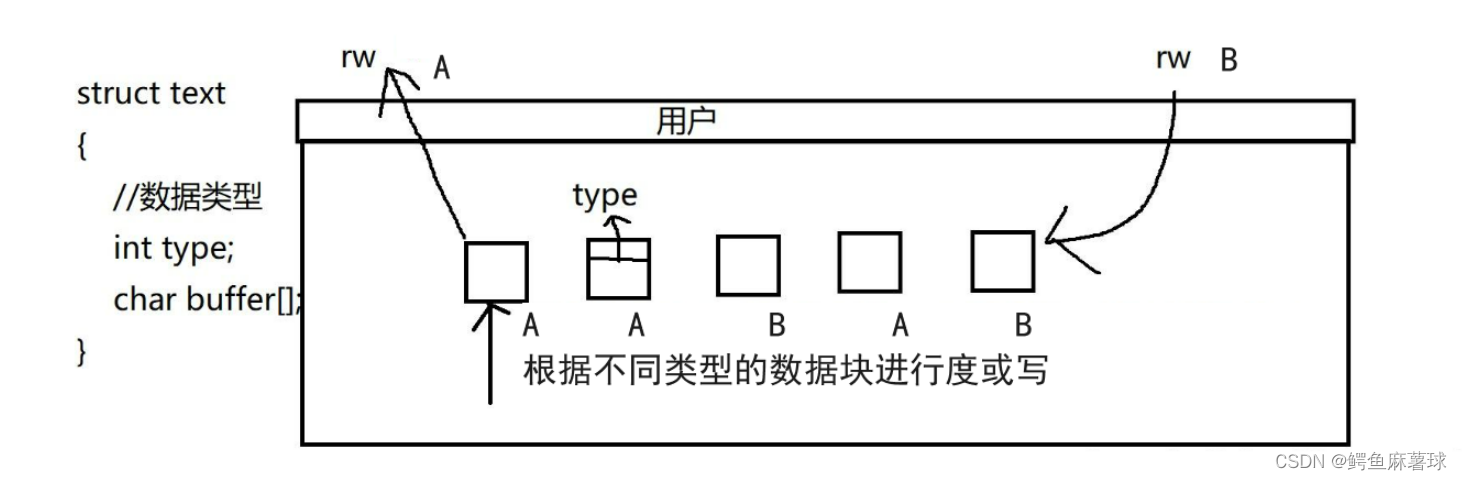
【Linux】进程间通信——system V共享内存、共享内存的概念、共享内存函数、system V消息队列、信号量
文章目录 进程间通信1.system V共享内存1.1共享内存原理1.2共享内存数据结构1.3共享内存函数 2.system V消息队列2.1消息队列原理 3.system V信号量3.1信号量原理3.2进程互斥 4.共享内存的使用示例 进程间通信 1.system V共享内存 1.1共享内存原理 共享内存区是最快的IPC形式…...
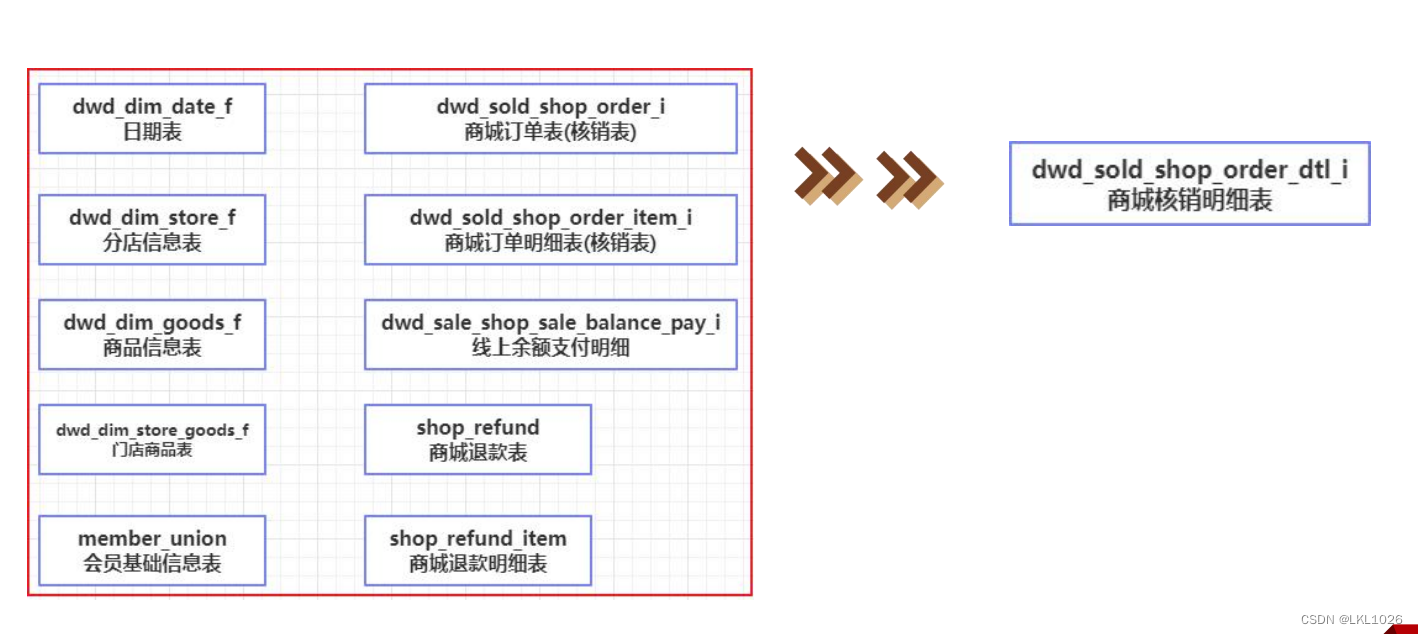
【黑马甄选离线数仓day05_核销主题域开发】
1. 指标分类 通过沟通调研,把需求进行分析、抽象和总结,整理成指标列表。指标有原子指标、派生指标、 衍生指标三种类型。 原子指标基于某一业务过程的度量值,是业务定义中不可再拆解的指标,原子指标的核心功能就是对指标…...

使用gin 代理 web网页
问web项目的代理,业界常用的方案是nginx做代理,这个是网上最多资料的。 因为我需要做自己的流量转发,也就是所有访问都要经过我的一个流量分发微服务,这和nginx作用冲突了。如果再加个nginx来做第一层方向代理和网页的静态资源代…...

计算器的模拟实现
计算器的模拟实现 一、实验题目:计算器二:实验目的:三:实验内容与实现1:【实验内容】2:【实验实现】1.计算器界面的实现,如下图所示:2:各项功能的实现,如下图…...

CentOS7搭建smb服务器
安装smb sudo yum install samba samba-client samba-common配置smb vim /etc/samba/smb.conf [shared] path /path/to/shared/folder writable yes browsable yes guest ok yes valid users yourname添加smb用户 sudo useradd youname sudo smbpasswd -a youname然后会…...
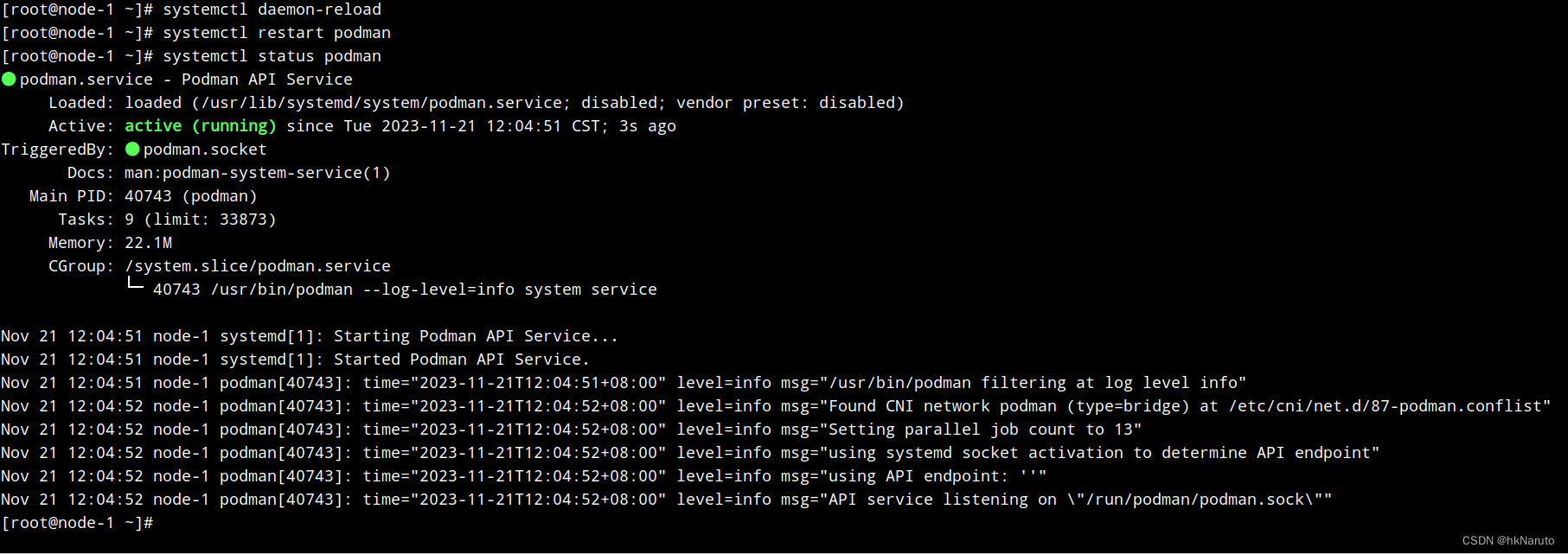
openEuler 22.03 LTS x86_64 cephadm 部署ceph 16.2.14 未完成 笔记
环境 准备三台虚拟机 10.47.76.94 node-1 10.47.76.95 node-2 10.47.76.96 node-3 下载cephadm [rootnode-1 ~]# yum install cephadm Last metadata expiration check: 0:11:31 ago on Tue 21 Nov 2023 10:00:20 AM CST. Dependencies resolved. Package …...

Java计算时间差,距结束还有几天几小时几分钟
文章目录 1、写法2、备份3、LocalDate、LocalDateTime、Date、String互转 1、写法 //静态方法,传入年月日时分秒 LocalDateTime startTime LocalDateTime.of(2023, 11, 22, 15, 09, 59); LocalDateTime endTime LocalDateTime.of(2023, 11, 30, 0, 0, 0); //计算…...

【云原生 Prometheus篇】Prometheus的动态服务发现机制与认证配置
目录 一、Prometheus服务发现的方式1.1 基于文件的服务发现1.2 基于consul的服务发现1.3 基于 Kubernetes API 的服务发现1.3.1 简介1.3.2 基于Kurbernetes发现机制的部分配置参数 二、实例一:部署基于文件的服务发现2.1 创建用于服务发现的文件2.2 修改Prometheus的…...
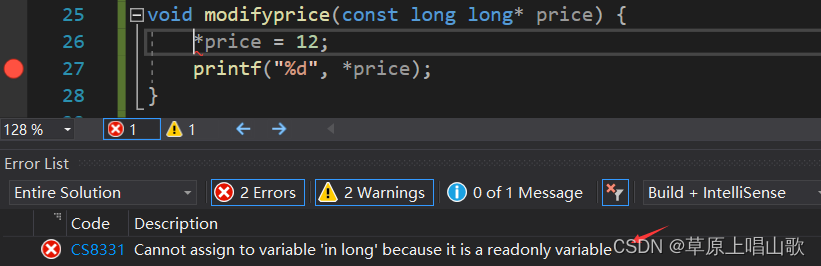
ref详解(C#)
本质上来说 ref 的就是把 C/C 指针的那一套又拿回来了,而且还封装成一套自己的玩法。 我想设计者的初心把 ref 的功能限制得死死的,可能也考虑到 C# 是一门面向业务开发的语言,讲究的是做项目快狠准,性能反而不是第一要素&#x…...

从原理图到代码:基于ADS1247与SPI接口的高精度PT100测温实践
1. ADS1247与PT100测温系统概述 第一次接触高精度温度测量项目时,我被PT100传感器的线性度和稳定性所吸引,但很快发现要发挥它的全部性能并不容易。传统方案使用普通ADC配合运放电路,不仅电路复杂,还容易引入噪声。直到发现了TI的…...

高德地图JS 2.0进阶:MarkerCluster高效聚合与交互事件全解析
1. 高德地图JS 2.0的MarkerCluster核心优势 高德地图JS API 2.0版本对标记点聚合进行了全面重构,MarkerCluster的底层实现从"先渲染后聚合"改为"先聚合后渲染"。实测在5000个标记点的场景下,2.0版本的帧率比1.4版本提升近3倍&#x…...

脑电分析实战手册:从信号降噪到智能分类的全流程解析
1. 脑电分析的核心价值与应用场景 脑电信号就像大脑发出的摩尔斯电码,记录着人类思维活动的每一个细微变化。想象一下,如果我们能破译这些电信号,就能读懂人的情绪状态、判断注意力集中程度,甚至预测某些神经系统疾病的前兆。这就…...

STM32新手必看:Simulink+STM32CubeMX联合生成串口代码的5个常见坑点
STM32开发实战:Simulink与STM32CubeMX联合开发中的串口通信避坑指南 当Simulink的算法仿真遇上STM32CubeMX的硬件抽象层配置,这种强强联合的开发模式正在改变嵌入式开发的效率边界。但理想很丰满,现实却很骨感——我第一次尝试用这对组合生成…...

前端模块化的历史演变
前端模块化的历史演变:从混沌到秩序 在Web开发的早期,前端代码往往以全局变量和脚本堆叠的方式组织,随着项目规模扩大,这种模式很快暴露出命名冲突、依赖混乱等问题。模块化的概念应运而生,成为解决复杂性的关键。本文…...

3个关键步骤解决游戏串流难题:Sunshine新手配置完全指南
3个关键步骤解决游戏串流难题:Sunshine新手配置完全指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否曾经梦想过在客厅沙发上用平板电脑玩PC游戏,…...

CLIP ViT-H-14图像编码服务灾备方案:双活部署与故障自动切换
CLIP ViT-H-14图像编码服务灾备方案:双活部署与故障自动切换 1. 项目背景与需求分析 在当今数字化时代,图像特征提取服务已成为众多AI应用的核心组件。CLIP ViT-H-14作为先进的视觉语言模型,其图像编码能力被广泛应用于内容检索、推荐系统、…...
translategemma-12b-it与卷积神经网络结合的图像翻译系统
TranslateGemma-12B-IT与卷积神经网络结合的图像翻译系统 1. 引言 想象一下,你正在国外旅行,面对满是外文的菜单一脸茫然;或者在工作中需要快速理解外文技术文档中的图表说明。传统的翻译工具需要先拍照再提取文字最后翻译,步骤…...

终极指南:Jellyfin Android TV客户端与服务器版本兼容性完全解析
终极指南:Jellyfin Android TV客户端与服务器版本兼容性完全解析 【免费下载链接】jellyfin-androidtv Android TV Client for Jellyfin 项目地址: https://gitcode.com/gh_mirrors/je/jellyfin-androidtv Jellyfin Android TV客户端是一款专为Android电视和…...

锐捷交换机VSU配置实战:从基础到高可用部署
1. 锐捷交换机VSU功能初探 第一次接触锐捷交换机的VSU功能时,我完全被它的设计理念吸引了。简单来说,VSU(Virtual Switching Unit)就像把两台物理交换机"合体"成一个逻辑设备。想象一下,你家的双胞胎兄弟突…...