11 月 25 日 ROS 学习笔记——3D 建模与仿真
文章目录
- 前言
- 一、在 ROS 中自定义机器人的3D模型
- 1. 在 rviz 里查看3D模型
- 2. xacro
- 二、Gazebo
- 1. urdf 集成 gazebo
- 2. 综合应用
- 1). 运动控制及里程计
- 2). 雷达仿真
- 3). 摄像头信息仿真
- 4). kinect 深度相机仿真
- 5). 点云
前言
本文为11 月 25 日 ROS 学习笔记——3D 建模与仿真,分为两个章节:
- 在 ROS 中自定义机器人的3D模型,
- Gazebo
一、在 ROS 中自定义机器人的3D模型
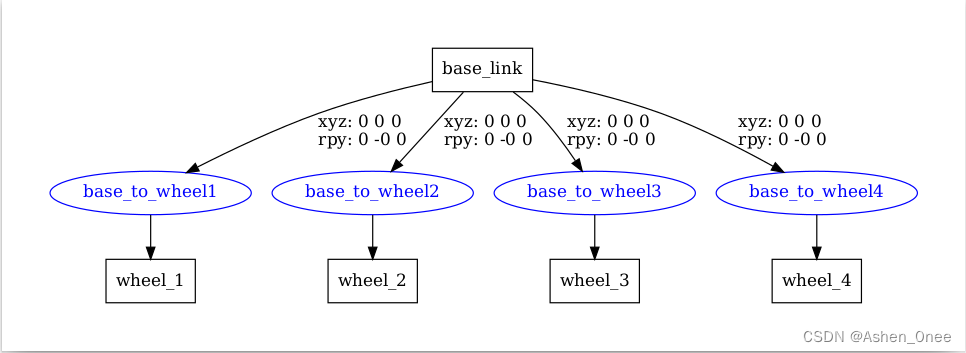
<robot name="Robot1"><link name="base_link"><visual><geometry><box size="0.2 .3 .1" /></geometry><origin rpy="0 0 0" xyz="0 0 0.05" /><material name="white"><color rgba="1 1 1 1" /></material></visual></link><link name="wheel_1"><visual><geometry><cylinder length="0.05" radius="0.05" /></geometry><origin rpy="0 1.5 0" xyz="0.1 0.1 0" /><material name="black"><color rgba="0 0 0 1" /></material></visual></link><link name="wheel_2"><visual><geometry><cylinder length="0.05" radius="0.05" /></geometry><origin rpy="0 1.5 0" xyz="-0.1 0.1 0" /><material name="black" /></visual></link><link name="wheel_3"><visual><geometry><cylinder length="0.05" radius="0.05" /></geometry><origin rpy="0 1.5 0" xyz="0.1 -0.1 0" /><material name="black" /></visual></link><link name="wheel_4"><visual><geometry><cylinder length="0.05" radius="0.05" /></geometry><origin rpy="0 1.5 0" xyz="-0.1 -0.1 0" /><material name="black" /></visual></link><joint name="base_to_wheel1" type="fixed"><parent link="base_link" /><child link="wheel_1" /><origin xyz="0 0 0" /></joint><joint name="base_to_wheel2" type="fixed"><parent link="base_link" /><child link="wheel_2" /><origin xyz="0 0 0" /></joint><joint name="base_to_wheel3" type="fixed"><parent link="base_link" /><child link="wheel_3" /><origin xyz="0 0 0" /></joint><joint name="base_to_wheel4" type="fixed"><parent link="base_link" /><child link="wheel_4" /><origin xyz="0 0 0" /></joint>
</robot>
- 检查书写的语法是否正确和配置是否有误
check_urdf robot1.urdf
>>> robot name is: Robot1---------- Successfully Parsed XML ---------------root Link: base_link has 4 child(ren)child(1): wheel_1child(2): wheel_2child(3): wheel_3child(4): wheel_4
- 以图形的方式来查看
urdf_to_graphiz robot1.urdf
>>> Created file Robot1.gvCreated file Robot1.pdfevince Robot1.pdf
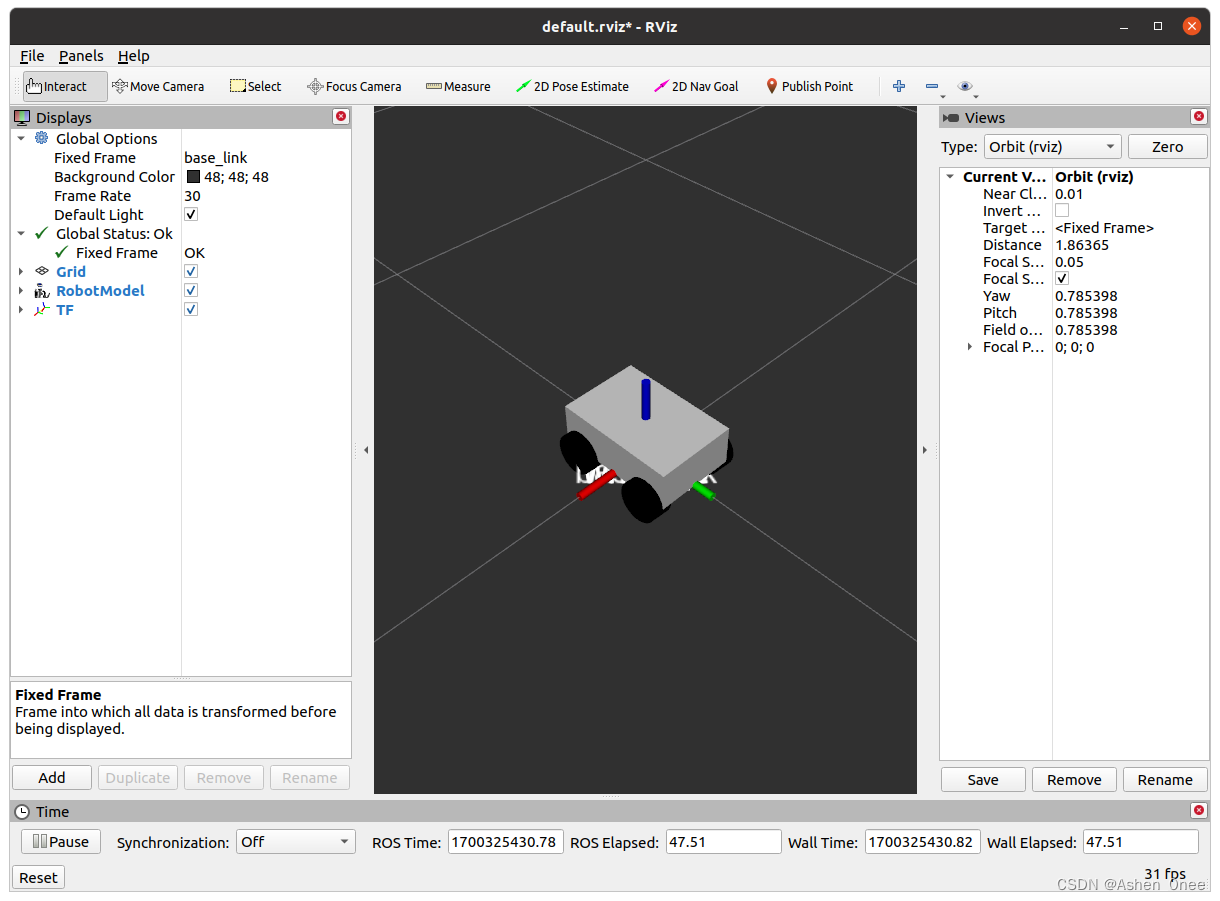
1. 在 rviz 里查看3D模型
- 创建 .launch 文件
<launch><arg name="model" /><arg name="gui" default="False" /><param name="robot_description" textfile="$(arg model)" /><param name="use_gui" value="$(arg gui)" /><node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /><node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>
- 启动命令
roslaunch robot1_description display.launch model:="$(rospack find robot1_description)/urdf/robot1.urdf"
- 添加一些组件
</joint><link name="arm_base">
<visual>
<geometry>
<box size="0.1 .1 .1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.1"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual><collision>
<geometry>
<box size="0.1 .1 .1"/>
</geometry>
</collision><inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link><joint name="base_to_arm_base" type="continuous">
<parent link="base_link"/>
<child link="arm_base"/>
<axis xyz="0 0 1"/>
<origin xyz="0 0 0"/>
</joint><link name="arm_1">
<visual>
<geometry>
<box size="0.05 .05 0.5"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.25"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.05 .05 0.5"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link><joint name="arm_1_to_arm_base" type="revolute">
<parent link="arm_base"/>
<child link="arm_1"/>
<axis xyz="1 0 0"/>
<origin xyz="0 0 0.15"/>
<limit effort ="1000.0" lower="-1.0" upper="1.0" velocity="0.5"/>
</joint>
<link name="arm_2">
<visual>
<geometry>
<box size="0.05 0.05 0.5"/>
</geometry>
<origin rpy="0 0 0" xyz="0.06 0 0.15"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.05 .05 0.5"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="arm_2_to_arm_1" type="revolute">
<parent link="arm_1"/>
<child link="arm_2"/>
<axis xyz="1 0 0"/>
<origin xyz="0.0 0 0.45"/>
<limit effort ="1000.0" lower="-2.5" upper="2.5" velocity="0.5"/>
</joint>
<joint name="left_gripper_joint" type="revolute">
<axis xyz="0 0 1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 -1.57 0" xyz="0.06 0 0.4"/>
<parent link="arm_2"/>
<child link="left_gripper"/>
</joint>
<link name="left_gripper">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://pr2_description/meshes/gripper_v0/l_finger.dae"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.1 .1 .1"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
</joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://pr2_description/meshes/gripper_v0/l_finger_tip.dae"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.1 .1 .1"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="right_gripper_joint" type="revolute">
<axis xyz="0 0 -1"/>
<limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/>
<origin rpy="0 -1.57 0" xyz="0.06 0 0.4"/>
<parent link="arm_2"/>
<child link="right_gripper"/>
</joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://pr2_description/meshes/gripper_v0/l_finger.dae"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.1 .1 .1"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
</joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://pr2_description/meshes/gripper_v0/l_finger_tip.dae"/>
</geometry>
</visual>
<collision>
<geometry>
<box size="0.1 .1 .1"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
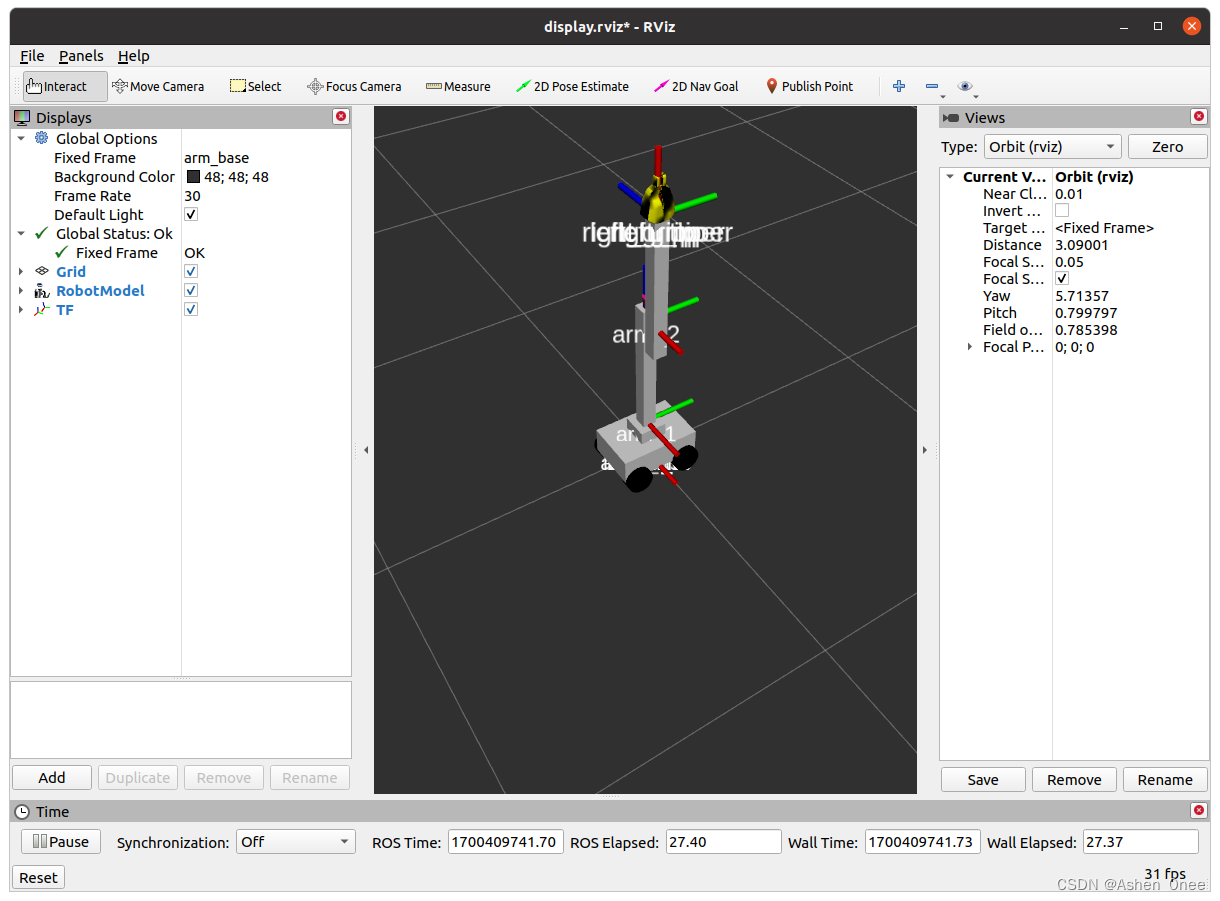
- 旋转关节
<joint name="arm_1_to_arm_base" type="revolute"><parent link="arm_base"/><child link="arm_1"/><axis xyz="1 0 0"/><origin xyz="0 0 0.15"/><limit effort ="1000.0" lower="-1.0" upper="1.0" velocity="0.5"/>
</joint>
2. xacro
Xacro 可帮助我们压缩 URDF 文件的大小, 增加文件的可读性和可维护性。它还允许我们创建模型并复用这些模型以创建相同的结构,如更多的手臂和腿.
- 使用 xacro 声明常量,避免在很多行重复定义同一个 数值
<xacro:property name="length_wheel" value="0.05" />
<xacro:property name="radius_wheel" value="0.05" />
- 使用常量
${name_of_variable}:
<cylinder length="${length_wheel}" radius="${radius_wheel}" />
- 将 .xacro 转换为 .urdf
rosrun xacro xacro demo01_helloworld.urdf.xacro
>>> <robot name="mycar"><link name="left_wheel"><visual><geometry><cylinder length="0.0015" radius="0.0325"/></geometry><origin rpy="1.57079635 0 0" xyz="0 0 0"/><material name="wheel_color"><color rgba="0 0 0 0.3"/></material></visual></link><!-- 3-2.joint --><joint name="left2link" type="continuous"><parent link="base_link"/><child link="left_wheel"/><!-- x 无偏移y 车体半径z z= 车体高度 / 2 + 离地间距 - 车轮半径--><origin rpy="0 0 0" xyz="0 0.1 -0.0225"/><axis xyz="0 1 0"/></joint><link name="right_wheel"><visual><geometry><cylinder length="0.0015" radius="0.0325"/></geometry><origin rpy="1.57079635 0 0" xyz="0 0 0"/><material name="wheel_color"><color rgba="0 0 0 0.3"/></material></visual></link><!-- 3-2.joint --><joint name="right2link" type="continuous"><parent link="base_link"/><child link="right_wheel"/><!-- x 无偏移y 车体半径z z= 车体高度 / 2 + 离地间距 - 车轮半径--><origin rpy="0 0 0" xyz="0 -0.1 -0.0225"/><axis xyz="0 1 0"/></joint></robot>
rosrun xacro xacro demo01_helloworld.urdf.xacro > demo01_helloworld.urdf
- 属性与运算
<xacro:property name="PI" value="3.1415927" />
<xacro:property name="radius" value="0.03" /><!-- 属性调用 -->
<myUsePropertyxxx name="${PI}" />
<myUsePropertyxxx name="${radius}" />rosrun xacro xacro demo02_field.urdf.xacro
>>> <robot name="mycar"><!-- 属性调用 --><myUsePropertyxxx name="3.1415927"/><myUsePropertyxxx name="0.03"/><!-- 数学运算 --></robot><!-- 数学运算 -->
<myUsePropertyyy result="${PI / 2}" />rosrun xacro xacro demo02_field.urdf.xacro
>>> <robot name="mycar"><!-- 属性调用 --><myUsePropertyxxx name="3.1415927"/><myUsePropertyxxx name="0.03"/><!-- 数学运算 --><myUsePropertyyy result="1.57079635"/></robot>
- 宏
<!-- 宏定义 -->
<xacro:macro name="getSum" params="num1 num2"><result value="${num1 + num2}" />
</xacro:macro><!-- 宏调用 -->
<xacro:getSum num1="1" num2="5" />>>> rosrun xacro xacro demo03_macro.urdf.xacro
<robot name="mycar"><result value="6"/>
</robot>- 文件包含
<xacro:include filename="demo02_field.urdf.xacro" />
<xacro:include filename="demo03_macro.urdf.xacro" />rosrun xacro xacro demo04_sum.urdf.xacro
>>> <robot name="mycar"><!-- 属性调用 --><myUsePropertyxxx name="3.1415927"/><myUsePropertyxxx name="0.03"/><!-- 数学运算 --><myUsePropertyyy result="1.57079635"/><result value="6"/></robot>
- xacro 集成 rviz
<param name="robot_description" command="$(find xacro)/xacro $(find urdf01_rviz)/urdf/xacro/demo05_car_base.urdf.xacro" />
- 控制移动机器人做圆周运动
<launch><!-- 载入 urdf 至参数服务器 --><!-- <param name="robot_description" textfile="$(find urdf01_rviz)/urdf/xacro/demo05_car_base.urdf" /> --><param name="robot_description" command="$(find xacro)/xacro $(find urdf01_rviz)/urdf/xacro/car.urdf.xacro" /><!-- 启动 rviz --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" /><!-- 添加关节状态发布节点 --><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><!-- 机器人状态发布节点 --><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><!-- 集成 arbotix 运动控制节点 --><node pkg="arbotix_python" type="arbotix_driver" name="driver" output="screen"><rosparam command="load" file="$(find urdf01_rviz)/config/control.yaml" /><param name="sim" value="true" /></node>
</launch>
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:x: 1.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 1.0"
二、Gazebo
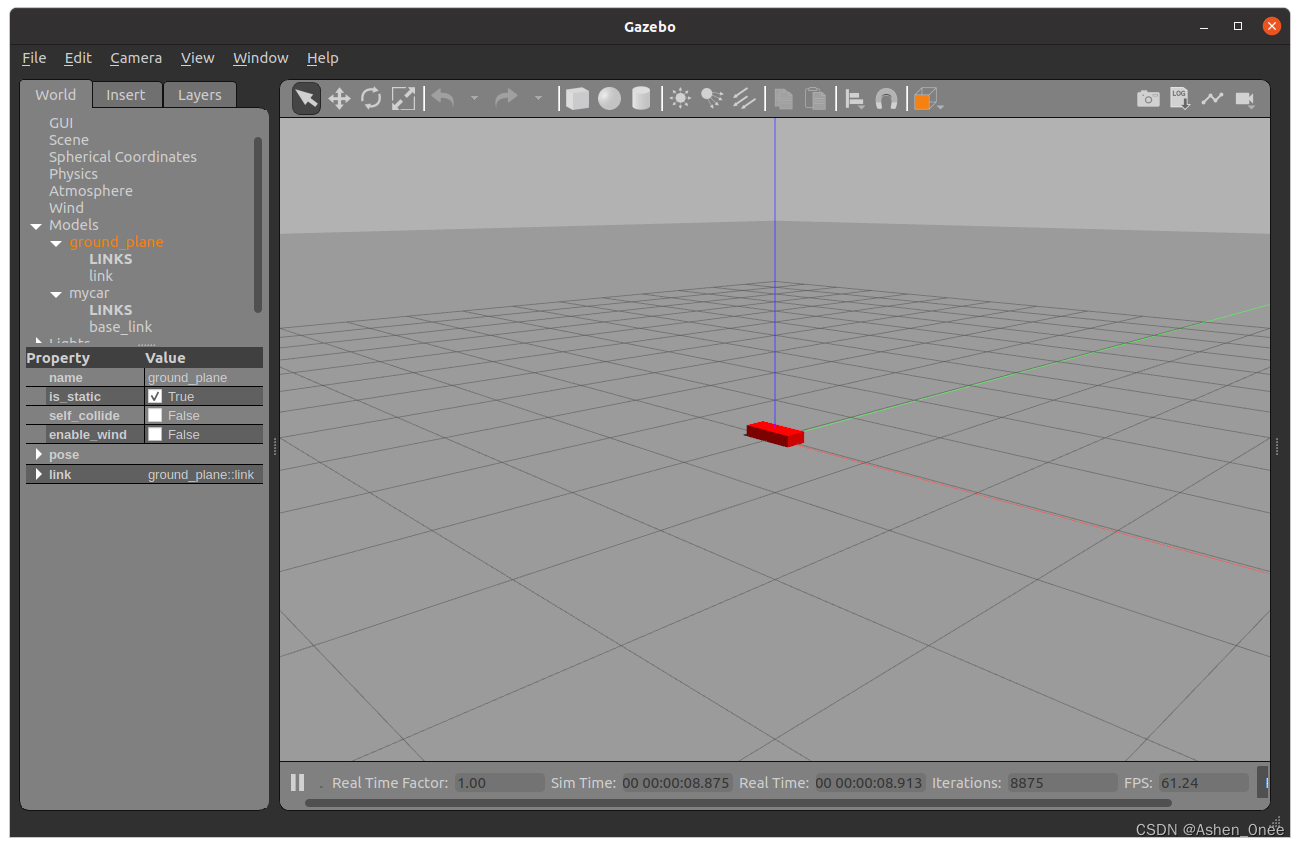
1. urdf 集成 gazebo
- 创建机器人模型
<robot name="mycar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="yellow"><color rgba="0.5 0.3 0.0 1" /></material></visual><collision><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><inertial><origin xyz="0 0 0" /><mass value="6" /><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" /></inertial></link><gazebo reference="base_link"><material>Gazebo/Red</material></gazebo></robot>
- 创建 .launch 文件
<launch><!-- 载入 urdf 至参数服务器 --><param name="robot_description" textfile="$(find urdf02_gazebo)/urdf/demo01_helloworld.urdf" /><!-- 启动 Gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch" /><!-- 添加机器人模型 --><node pkg="gazebo_ros" type="spawn_model" name="spawn_model" args="-urdf -model mycar -param robot_description" />
</launch>
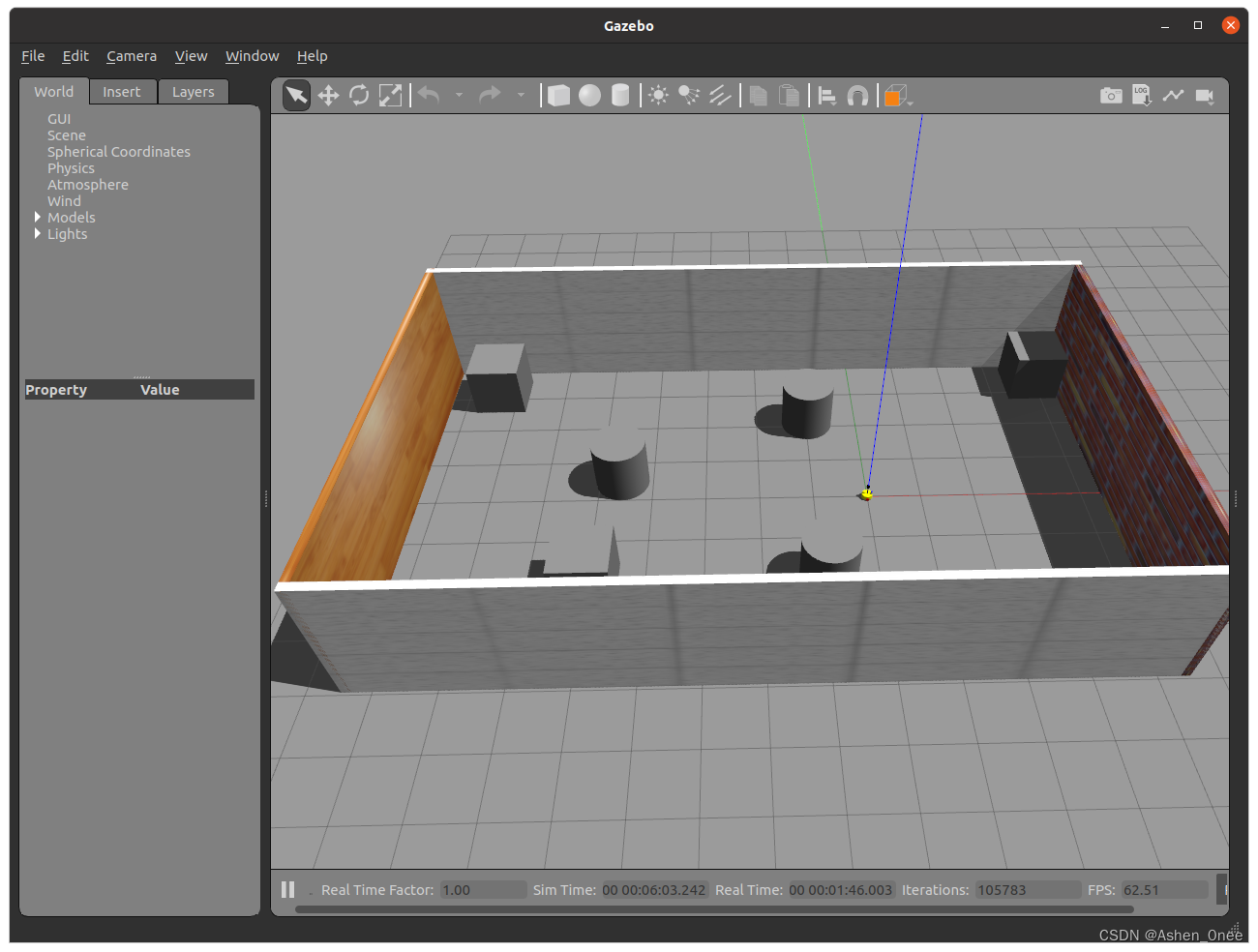
- 仿真环境集成
<launch><!-- 载入 urdf 至参数服务器 --><param name="robot_description" command="$(find xacro)/xacro $(find urdf02_gazebo)/urdf/car.urdf.xacro" /><!-- 启动 Gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="${find urdf02_gazebo}/worlds/box_house.world" /></include><!-- 添加机器人模型 --><node pkg="gazebo_ros" type="spawn_model" name="spawn_model" args="-urdf -model mycar -param robot_description" />
</launch>
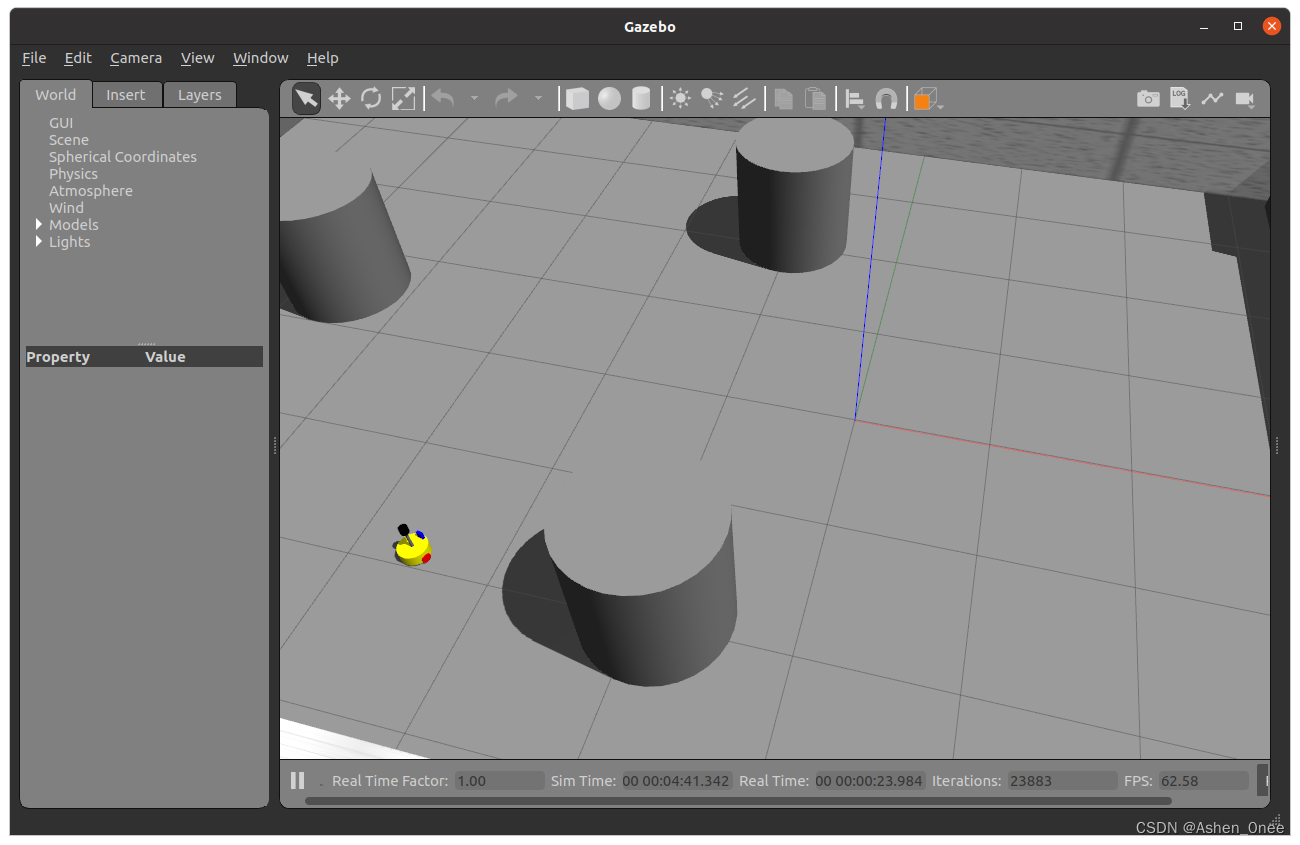
2. 综合应用
1). 运动控制及里程计
- 在 gazebo 中运动控制
<robot name="my_car_move" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 传动实现:用于连接控制器与关节 --><xacro:macro name="joint_trans" params="joint_name"><!-- Transmission is important to link the joints and the controller --><transmission name="${joint_name}_trans"><type>transmission_interface/SimpleTransmission</type><joint name="${joint_name}"><hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface></joint><actuator name="${joint_name}_motor"><hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission></xacro:macro><!-- 每一个驱动轮都需要配置传动装置 --><xacro:joint_trans joint_name="base_l_wheel_joint" /><xacro:joint_trans joint_name="base_r_wheel_joint" /><!-- 控制器 --><gazebo><plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so"><rosDebugLevel>Debug</rosDebugLevel><publishWheelTF>true</publishWheelTF><robotNamespace>/</robotNamespace><publishTf>1</publishTf><publishWheelJointState>true</publishWheelJointState><alwaysOn>true</alwaysOn><updateRate>100.0</updateRate><legacyMode>true</legacyMode><leftJoint>base_l_wheel_joint</leftJoint> <!-- 左轮 --><rightJoint>base_r_wheel_joint</rightJoint> <!-- 右轮 --><wheelSeparation>${base_radius * 2}</wheelSeparation> <!-- 车轮间距 --><wheelDiameter>${wheel_radius * 2}</wheelDiameter> <!-- 车轮直径 --><broadcastTF>1</broadcastTF><wheelTorque>30</wheelTorque><wheelAcceleration>1.8</wheelAcceleration><commandTopic>cmd_vel</commandTopic> <!-- 运动控制话题 --><odometryFrame>odom</odometryFrame> <odometryTopic>odom</odometryTopic> <!-- 里程计话题 --><robotBaseFrame>base_footprint</robotBaseFrame> <!-- 根坐标系 --></plugin></gazebo></robot>
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:x: 1.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 1.0"
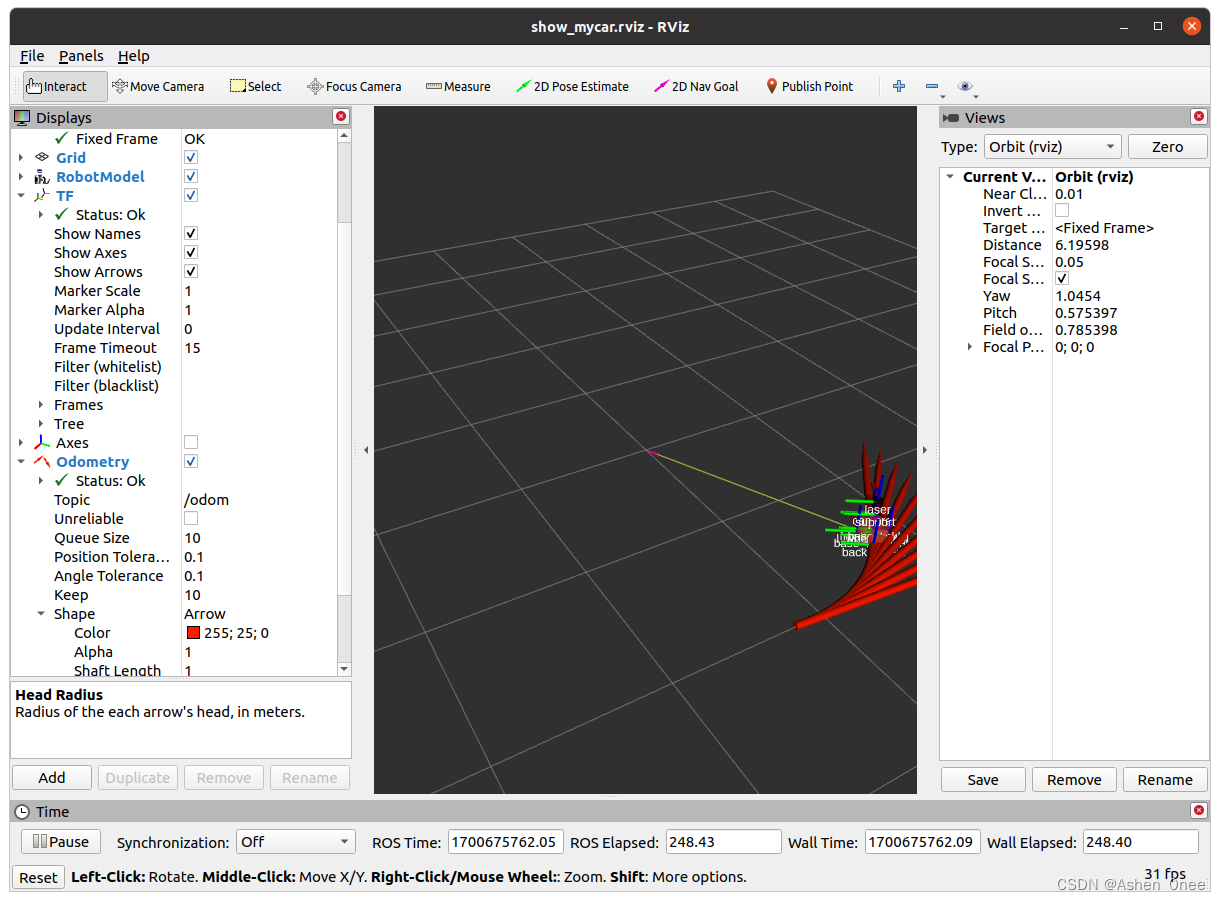
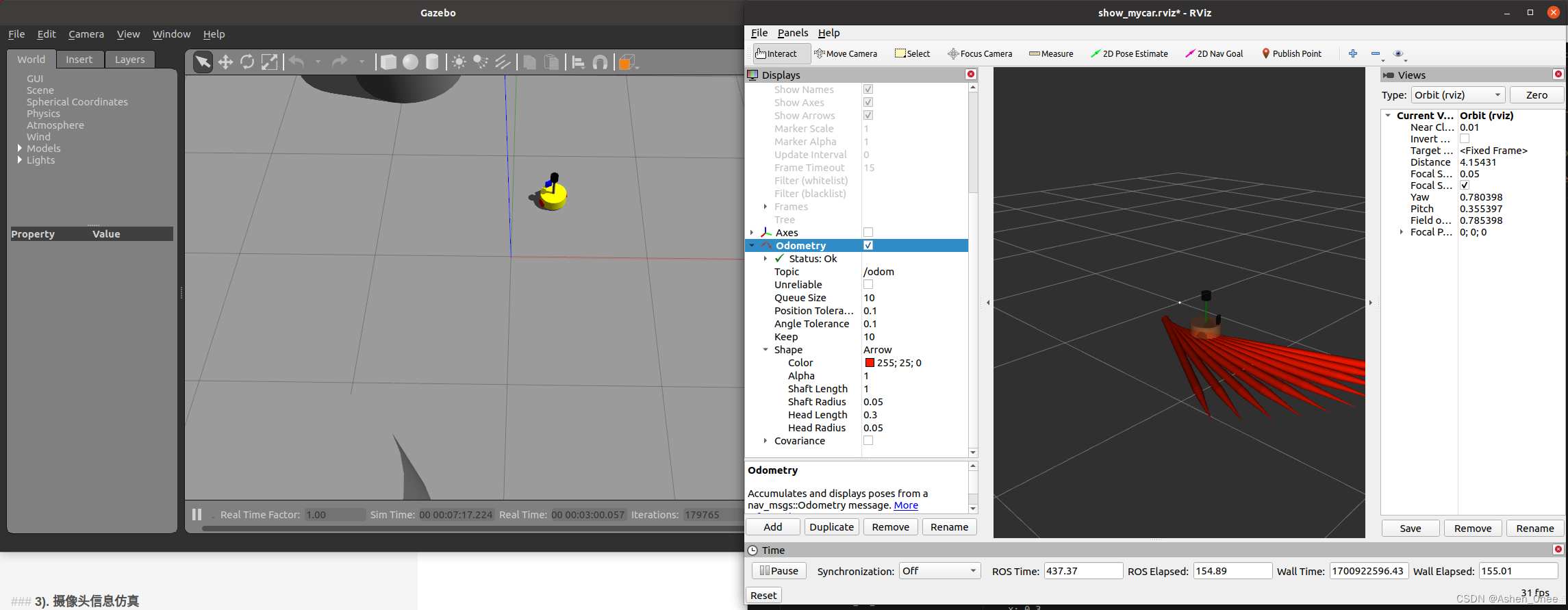
- 在 rviz 中查看里程计消息
<launch><!-- 启动 rviz --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" /><!-- 添加关节状态发布节点 --><!-- <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> --><!-- 机器人状态发布节点 --><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /></launch>
2). 雷达仿真
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 雷达 --><gazebo reference="laser"><sensor type="ray" name="rplidar"><pose>0 0 0 0 0 0</pose><visualize>true</visualize><update_rate>5.5</update_rate><ray><scan><horizontal><samples>360</samples><resolution>1</resolution><min_angle>-3</min_angle><max_angle>3</max_angle></horizontal></scan><range><min>0.10</min><max>30.0</max><resolution>0.01</resolution></range><noise><type>gaussian</type><mean>0.0</mean><stddev>0.01</stddev></noise></ray><plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so"><topicName>/scan</topicName><frameName>laser</frameName></plugin></sensor></gazebo></robot>
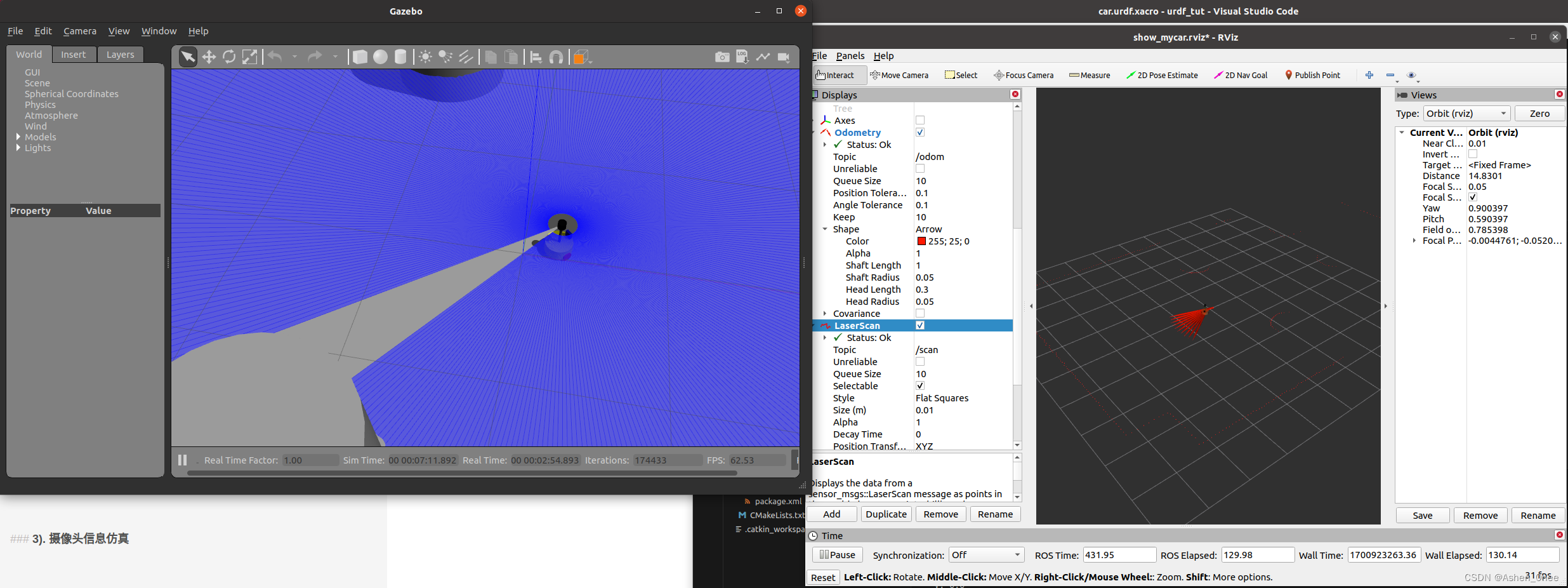
3). 摄像头信息仿真
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 被引用的link --><gazebo reference="camera"><!-- 类型设置为 camara --><sensor type="camera" name="camera_node"><update_rate>30.0</update_rate> <!-- 更新频率 --><!-- 摄像头基本信息设置 --><camera name="head"><horizontal_fov>1.3962634</horizontal_fov><image><width>1280</width><height>720</height><format>R8G8B8</format></image><clip><near>0.02</near><far>300</far></clip><noise><type>gaussian</type><mean>0.0</mean><stddev>0.007</stddev></noise></camera><!-- 核心插件 --><plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>0.0</updateRate><cameraName>/camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>camera</frameName><hackBaseline>0.07</hackBaseline><distortionK1>0.0</distortionK1><distortionK2>0.0</distortionK2><distortionK3>0.0</distortionK3><distortionT1>0.0</distortionT1><distortionT2>0.0</distortionT2></plugin></sensor></gazebo></robot>
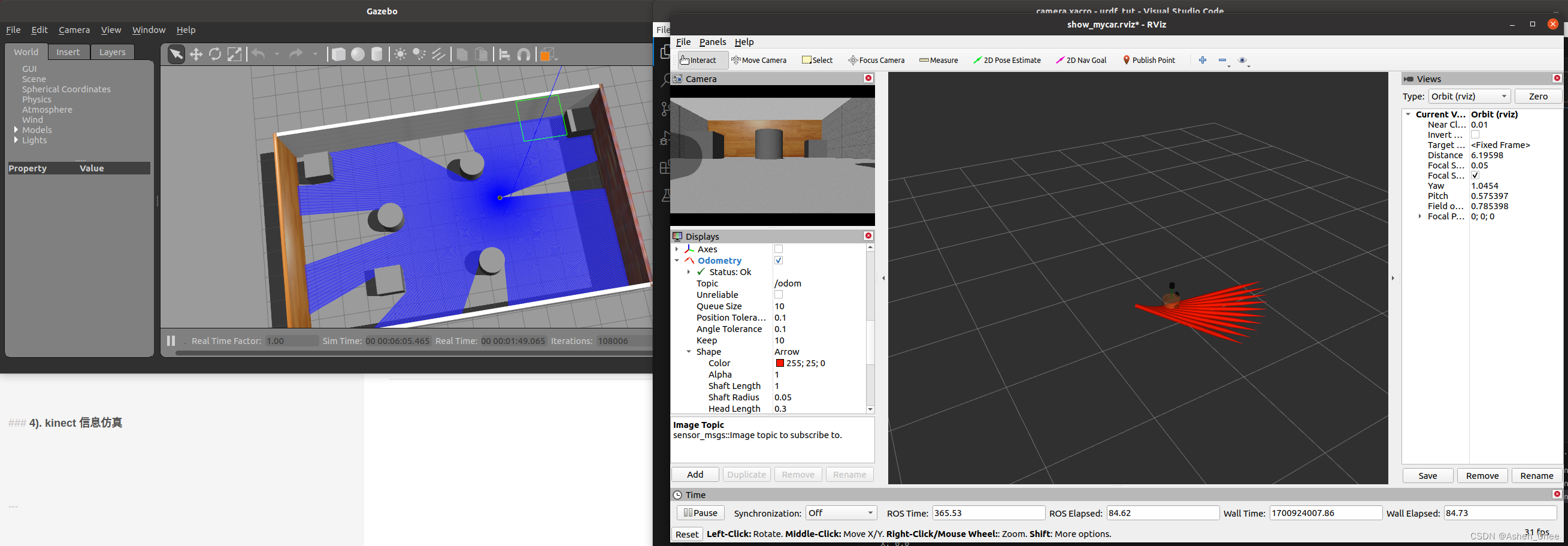
4). kinect 深度相机仿真
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><gazebo reference="support"> <sensor type="depth" name="camera"><always_on>true</always_on><update_rate>20.0</update_rate><camera><horizontal_fov>${60.0*PI/180.0}</horizontal_fov><image><format>R8G8B8</format><width>640</width><height>480</height></image><clip><near>0.05</near><far>8.0</far></clip></camera><plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so"><cameraName>camera</cameraName><alwaysOn>true</alwaysOn><updateRate>10</updateRate><imageTopicName>rgb/image_raw</imageTopicName><depthImageTopicName>depth/image_raw</depthImageTopicName><pointCloudTopicName>depth/points</pointCloudTopicName><cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName><depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName><frameName>support</frameName><baseline>0.1</baseline><distortion_k1>0.0</distortion_k1><distortion_k2>0.0</distortion_k2><distortion_k3>0.0</distortion_k3><distortion_t1>0.0</distortion_t1><distortion_t2>0.0</distortion_t2><pointCloudCutoff>0.4</pointCloudCutoff></plugin></sensor></gazebo></robot>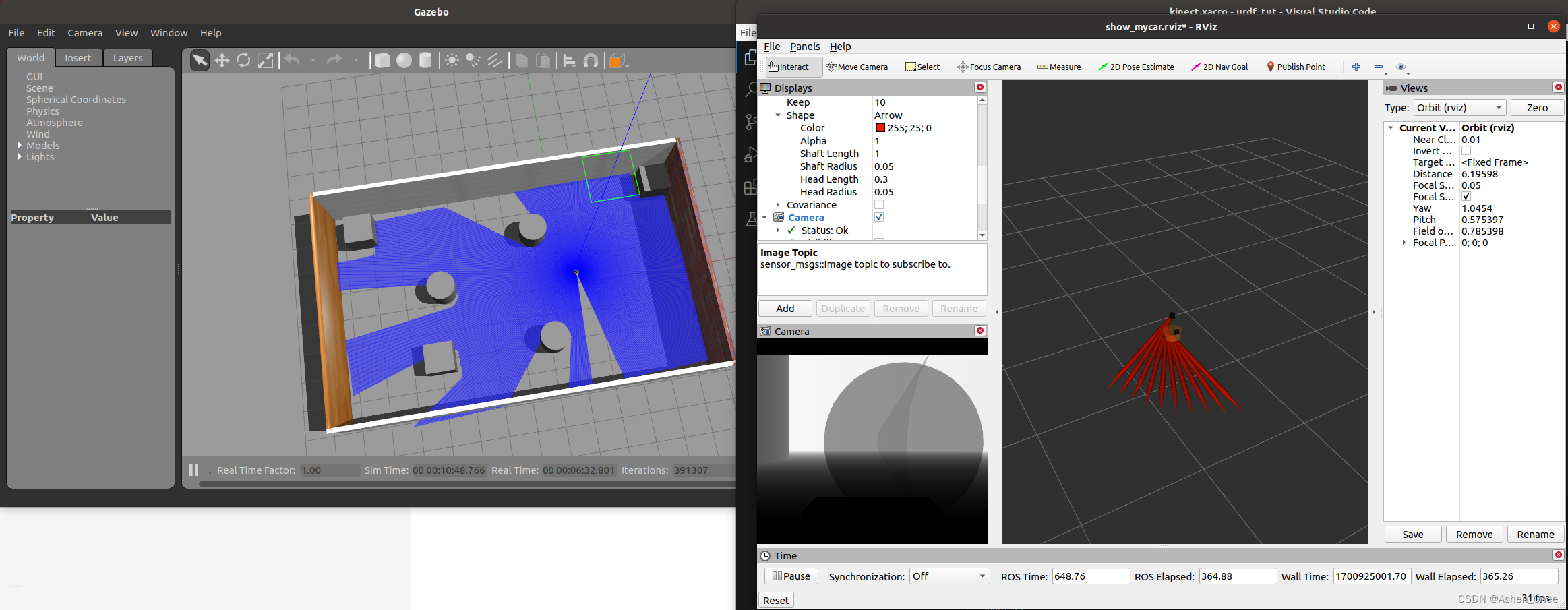
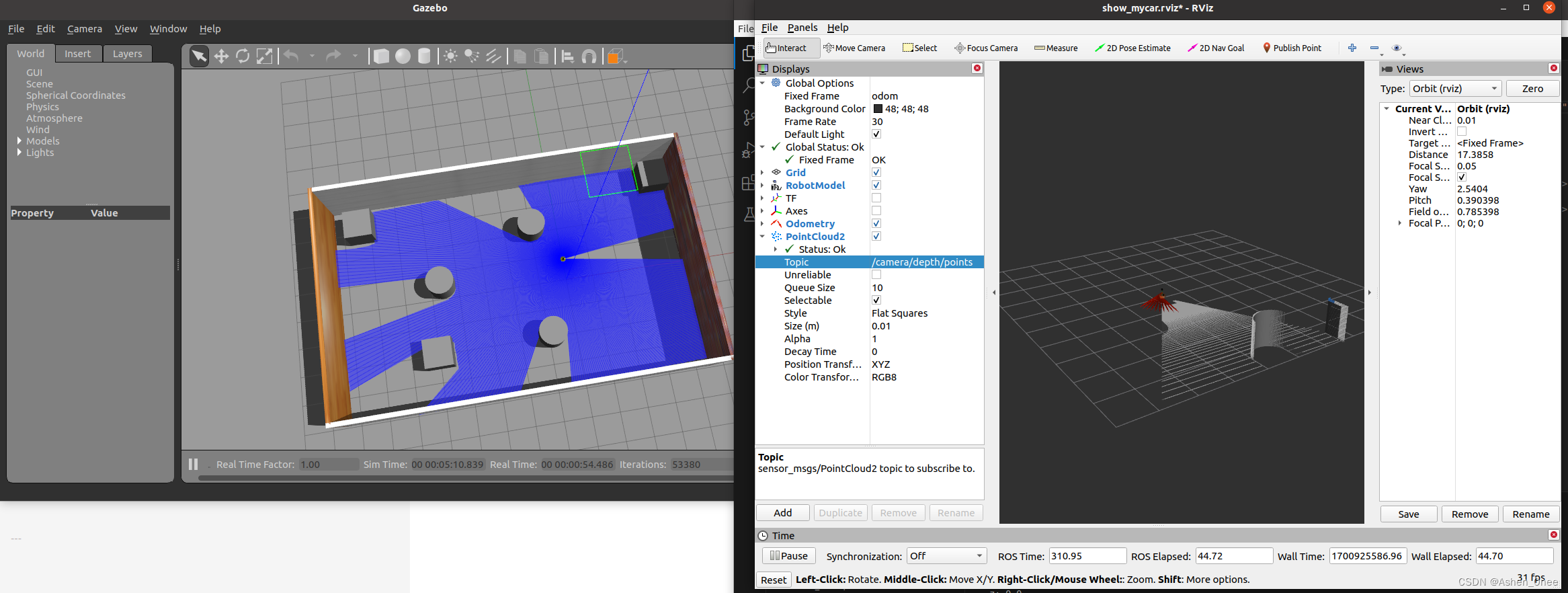
5). 点云
- 修改配置文件的
FrameName标签并添加坐标变换关系
<frameName>support_depth</frameName><!-- 点云坐标系到 kinect 连杆坐标系的变换 -->
<node pkg="tf2_ros" name="static_transform_publisher" type="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />
相关文章:
11 月 25 日 ROS 学习笔记——3D 建模与仿真
文章目录 前言一、在 ROS 中自定义机器人的3D模型1. 在 rviz 里查看3D模型2. xacro 二、Gazebo1. urdf 集成 gazebo2. 综合应用1). 运动控制及里程计2). 雷达仿真3). 摄像头信息仿真4). kinect 深度相机仿真5). 点云 前言 本文为11 月 25 日 ROS 学习笔记——3D 建模与仿真&am…...
MidJourney笔记(3)-Prompts
MidJourney的Prompts介绍 MidJourney的Prompts是MidJourney的核心之一,这也是我们后续使用MidJourney过程中最重要的工作内容,根据生成的图片,不断的优化我们的Prompts内容。 那Prompts的中文意思是提示的意思。 Prompts的提示语有很多,最基础的用法就是: /imagine prompt…...

贪心 D. Least Cost Bracket Sequence
Problem - D - Codeforces 题目大意:给一个只包含(,),?三个字符的字符串。每个?可以转为(或者),对于第 i i i个?转为(需要花费 a i a_i ai,转为)需要花费 b i b_i bi。现在问能否让该字符串转为合法的括号匹配…...
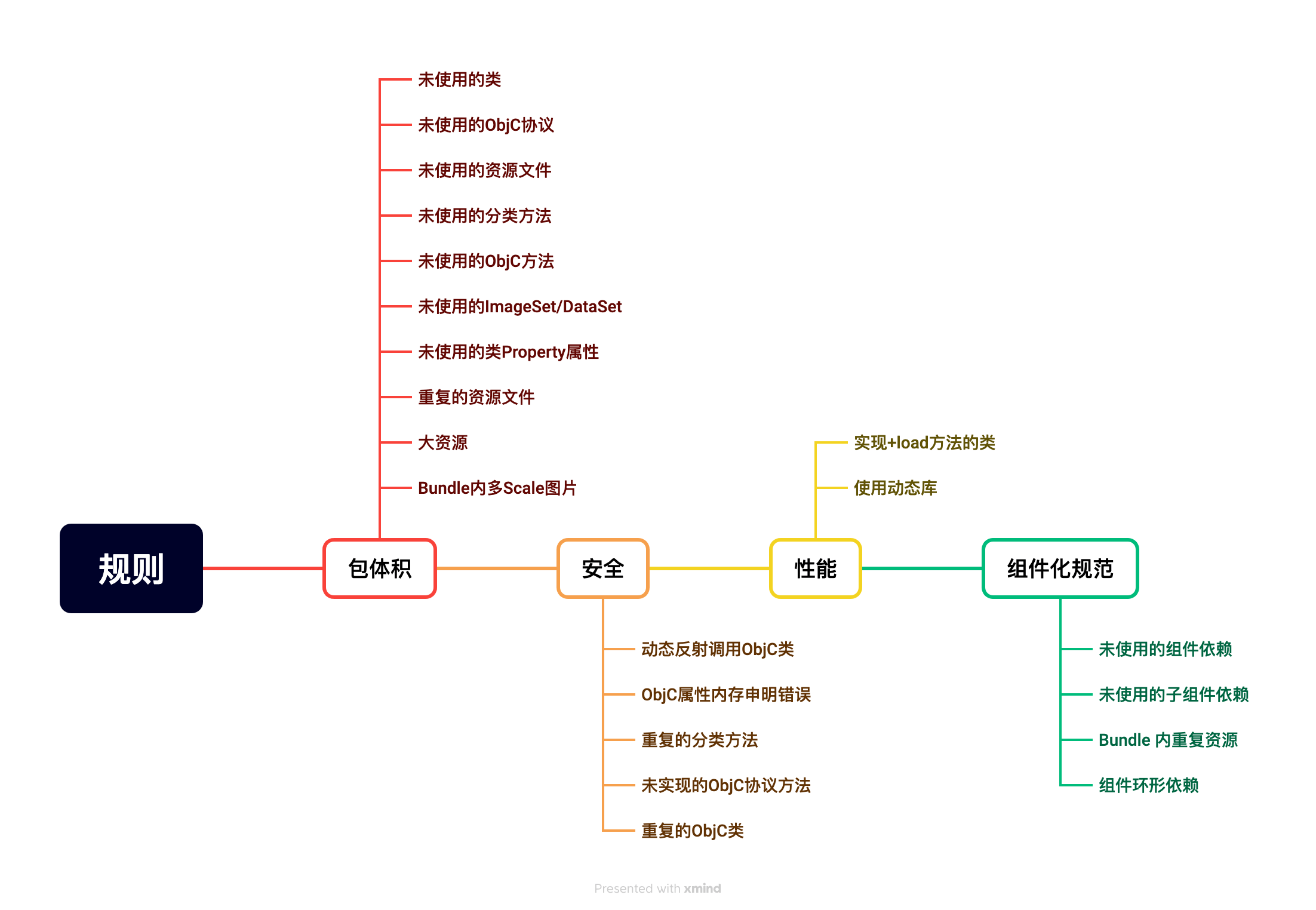
iOS APP包分析工具 | 京东云技术团队
介绍 分享一款用于分析iOSipa包的脚本工具,使用此工具可以自动扫描发现可修复的包体积问题,同时可以生成包体积数据用于查看。这块工具我们团队内部已经使用很长一段时间,希望可以帮助到更多的开发同学更加效率的优化包体积问题。 工具下载…...
在 VSCode 中使用 GDB 进行 C/C++ 程序调试(图文版)
(꒪ꇴ꒪ ),Hello我是祐言QAQ我的博客主页:C/C语言,数据结构,Linux基础,ARM开发板,网络编程等领域UP🌍快上🚘,一起学习,让我们成为一个强大的攻城狮࿰…...

任意文件读取漏洞理解
任意文件读取漏洞理解 1. 漏洞描述: 任意文件读取漏洞是指攻击者可以利用漏洞读取系统上的任意文件,包括敏感信息的配置文件、用户数据甚至系统文件,从而获取未经授权的访问权限。 2. 漏洞原理: 这种漏洞通常是由程序处理用户输入…...

linux 安装yum
问题1:File "/usr/libexec/urlgrabber-ext-down", line 28 except OSError, e: ^ 问题2:yum File "/usr/bin/yum", line 30 except KeyboardInterrupt, e: ^ vim /usr/…...

数学启发式
学习资料: 优化求解器 | Gurobi 数学启发式算法:参数类型与案例实现 数学启发式算法 | 可行性泵 (Feasibility Pump)算法精讲:一份让您满意的【理论介绍编程实现数值实验】学习笔记(PythonGurobi实现) 大佬到底是大佬!这些资料太…...

Win10/Win11 使用Wsl的Ubuntu 子系统搭建CGO环境,相当于Ubuntu下开发。GO环境CGO搭建,支持交叉编译
背景: 之前是使用Mac 开发,最近切换到win11下面。发现使用cgo编译有问题。 下面记载了我的使用方法。 环境: win11(win10理论一样) win11 安装了wsl2的环境,并且安装了ubuntu系统。 在win11 上面安装了g…...

CSS新特性(2-2)
CSS新特性(2-2) 前言box相关box-shadow background背景rgba颜色与透明度transform:rotate(Xdeg) 2D旋转transform:tranlate 平移 前言 本文继续讲解CSS3其他的新特性,想看之前新特性点击这里,那么好本文正式开始。 box相关 box…...
为什么,word文件在只读模式下,仍然能编辑?
Word文档设置了只读模式,是可以编辑的,但是当我们进行保存的时候就会发现,word提示需要重命名并选择新路径才能够保存。 这种操作,即使可以编辑文字,但是原文件是不会受到影响的,编辑之后的word文件会保存到…...

29 - 装饰器模式:如何优化电商系统中复杂的商品价格策略?
开始今天的学习之前,我想先请你思考一个问题。假设现在有这样一个需求,让你设计一个装修功能,用户可以动态选择不同的装修功能来装饰自己的房子。例如,水电装修、天花板以及粉刷墙等属于基本功能,而设计窗帘装饰窗户、…...
逆矩阵相关性质与例题
1.方阵的行列式:就是将方阵中的每一个元素转换至行列式中。 1.性质一:转置方阵的行列式等于转置前的行列式。(对标性质:行列式与它的转置行列式相等) 2.性质二:|ka||a|*k的n次方,n为方阵阶数。 …...

Ruoyi项目传List到后台并使用Excel模板下载数据的方法以及遇到的各种前后端数据交互问题
import { download } from @/utils/requestconst app = createApp(App)// 全局方法挂载 app.config.globalProperties.download = download 首先因为ruoyi-ui中的main.js有配置如上全局注册: 因此只需要在vue中定义一个方法直接使用this.download调用下载即可: (download的3…...

区块链技术将如何影响未来的数字营销?
你是否听腻了区块链和数字营销等流行语,却不明白它们对未来意味着什么?那么,准备好系好安全带吧,因为区块链技术将彻底改变我们对数字营销的看法。从建立消费者信任到提高透明度和效率,其可能性是无限的。 让我们来探…...

小程序wx:if和hidden的区别?
wx:if:wx:if 是一个完整的条件渲染指令,当它的表达式为真时,才会渲染该指令所在的元素。如果表达式的值为假,则不会渲染该元素。这意味着在表达式为假时,该元素及其子元素都不会被渲染,就像它们从未存在过一…...

分布式幂等
分布式幂等 在分布式系统、网络通信和数据库操作中,幂等性是一个非常重要的概念,特别是在面对可能发生网络故障、消息重复、或者系统崩溃等情况时。 举个简单的例子,考虑一个银行转账的操作。如果转账操作是幂等的,那么无论你执…...

大数据 DataX-Web 详细安装教程
目录 一、DataX-Web 介绍 1.1 DataX-Web 是什么 1.2 DataX-Web 架构 二、DataX-Web 安装部署 2.1 环境要求 2.2 安装 2.3 部署 2.4 数据库初始化 2.5 配置 2.6 启动服务 2.6.1 一键启动所有服务 2.6.2 一键取消所有服务 2.7 查看服务(注意!…...

CSS3媒体查询实现不同宽度的下不同内容的展示
文章目录 前言CSS3 多媒体查询实例520 到 699px 宽度 - 添加邮箱图标700 到 1000px - 添加文本前缀信息大于 1001px 宽度 - 添加邮件地址大于 1151px 宽度 - 添加图标代码后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:CSS ὃ…...

使用 STM32 读取和解析 NTC 热敏电阻的数值
本文介绍了如何利用 STM32 微控制器读取和解析 NTC(Negative Temperature Coefficient)热敏电阻的数值。首先,我们将简要介绍 NTC 热敏电阻的原理和特性。接下来,我们将详细讨论如何设计电路连接和采用合适的 STM32 外设进行数值读…...

15N70-ASEMI中大功率场景的能效新王者15N70
15N70-ASEMI中大功率场景的能效新王者15N70型号:16N65沟道:NPN品牌:ASEMI封装:TO-220F批号:最新导通内阻:0.6Ω漏源电流:15A漏源电压:700V引脚数量:3特性:N沟…...

揭秘.NET 11原生AI推理引擎:如何绕过ML.NET抽象层直击TensorRT/ONNX Runtime调度内核?
第一章:.NET 11原生AI推理引擎的架构演进与定位.NET 11 将 AI 推理能力深度融入运行时层,首次在框架级提供原生、跨平台、低开销的模型加载与执行支持,不再依赖外部 Python 运行时或独立推理服务。这一转变标志着 .NET 从“AI 应用宿主”正式…...

2025届必备的降AI率助手实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 随着人工智能生成内容也就是AIGC技术在学术写作里的普及,高校以及期刊已经普遍引…...

如何一键同步网易云音乐到Discord?完整免费教程指南
如何一键同步网易云音乐到Discord?完整免费教程指南 【免费下载链接】NetEase-Cloud-Music-DiscordRPC 在Discord上显示网抑云/QQ音乐. Enables Discord Rich Presence For Netease Cloud Music/Tencent QQ Music. 项目地址: https://gitcode.com/gh_mirrors/ne/…...

3步搭建智能媒体库:MoviePilot让NAS影视管理变简单
3步搭建智能媒体库:MoviePilot让NAS影视管理变简单 【免费下载链接】MoviePilot NAS媒体库自动化管理工具 项目地址: https://gitcode.com/gh_mirrors/mo/MoviePilot MoviePilot是一个专注于NAS媒体库自动化管理的开源工具,通过智能化的设计和简洁…...

NUMA架构与Linux内存策略优化实践
1. NUMA架构与内存策略基础 NUMA(Non-Uniform Memory Access)架构是现代多核处理器系统中的重要设计范式。与传统的UMA(Uniform Memory Access)架构不同,NUMA系统中每个处理器核心或处理器组(称为NUMA节点&…...

破解索尼S-AIR无线音频协议:逆向工程实战
1. 项目背景与问题定位索尼S-AIR无线音频系统曾是家庭影院领域颇具特色的解决方案,但其封闭性设计也带来了硬件锁定的痛点。我手头的TA-SA100WR无线环绕声放大器就面临这样的困境——原配发射器丢失后,这台功能完好的设备瞬间沦为摆设。市场上二手发射器…...
)
URDF还是SDF?给ROS1/ROS2开发者的Gazebo模型格式选择指南(含避坑建议)
URDF还是SDF?给ROS1/ROS2开发者的Gazebo模型格式选择指南(含避坑建议) 当你在Gazebo中调试机器人模型时,是否遇到过这些情况:精心设计的URDF模型导入后突然沉入地面,关节运动方向完全错乱,或是发…...

三步解锁Beyond Compare 5完整功能:免费密钥生成器终极指南
三步解锁Beyond Compare 5完整功能:免费密钥生成器终极指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen 还在为Beyond Compare 5的30天评估期到期而烦恼吗?想要免费获…...
规模创新高,资金持续净流入布局有色矿业)
有色ETF华安(512940.SH)规模创新高,资金持续净流入布局有色矿业
4月20日,有色ETF华安(512940.SH)震荡上行,截至收盘报0.959元,涨幅0.63%,同步跟踪的中证有色金属矿业指数上涨0.64%,日内走势与标的指数高度贴合,呈现出良好的跟踪效果。据红色火箭数…...