RT-Thread 线程间同步【信号量、互斥量、事件集】
线程间同步
- 一、信号量
- 1. 创建信号量
- 2. 获取信号量
- 3. 释放信号量
- 4. 删除信号量
- 5. 代码示例
- 二、互斥量
- 1. 创建互斥量
- 2. 获取互斥量
- 3. 释放互斥量
- 4. 删除互斥量
- 5. 代码示例
- 三、事件集
- 1. 创建事件集
- 2. 发送事件
- 3. 接收事件
- 4. 删除事件集
- 5. 代码示例
简单来说,同步就是多个线程同时访问一块内存,好比如 一个线程向指定内存中写入一个数据,另一个线程就从该内存中读取数据,这就是“同步”。

线程的同步方式有很多种,其核心思想都是:在访问临界区的时候只允许一个 (或一类) 线程运行。
(以下都以动态创建方式介绍)
一、信号量
信号量是一种轻型的用于解决线程间同步问题的内核对象,线程可以获取或释放它,从而达到同步或互斥的目的。
每个信号量对象都有一个信号量值和一个线程等待队列,信号量的值对应了信号量对象的实例数目、资源数目,假如信号量值为 5,则表示共有 5 个信号量实例(资源)可以被使用,当信号量实例数目为零时,再申请该信号量的线程就会被挂起在该信号量的等待队列上,等待可用的信号量实例(资源)。
1. 创建信号量
当创建一个信号量时,内核首先创建一个信号量控制块,然后对该控制块进行基本的初始化工作
rt_sem_t rt_sem_create(const char *name,rt_uint32_t value,rt_uint8_t flag);

注: RT_IPC_FLAG_FIFO(先进先出)方式时,那么等待线程队列将按照先进先出的方式排队,先进入的线程将先获得等待的信号量;当选择 RT_IPC_FLAG_PRIO(优先级等待)方式时,等待线程队列将按照优先级进行排队,优先级高的等待线程将先获得等待的信号量。。
2. 获取信号量
线程通过获取信号量来获得信号量资源实例,当信号量值大于零时,线程将获得信号量,并且相应的信号量值会减 1
rt_err_t rt_sem_take (rt_sem_t sem, rt_int32_t time);
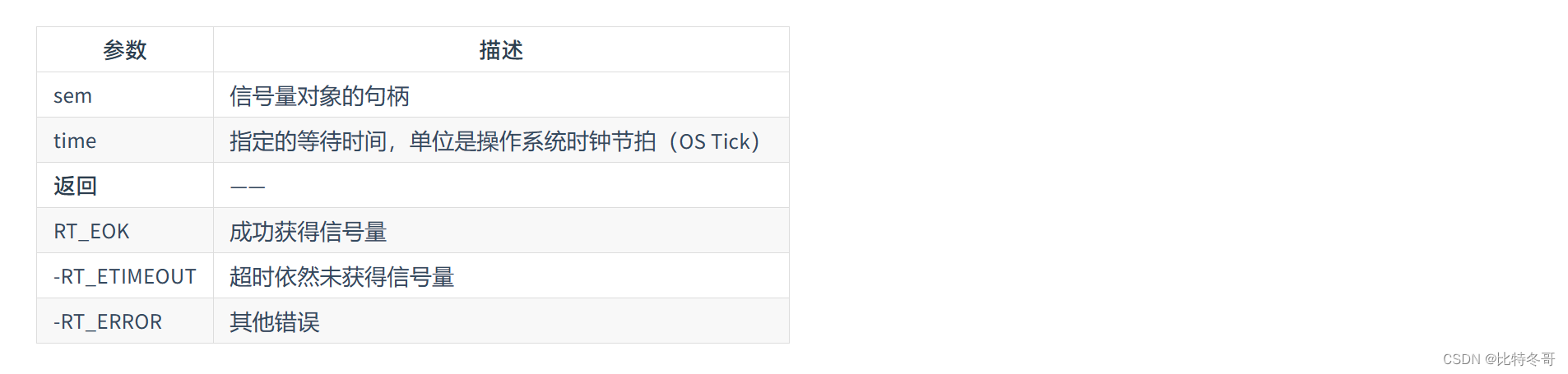
在调用这个函数时,如果信号量的值等于零,那么说明当前信号量资源实例不可用,申请该信号量的线程将根据 time 参数的情况选择直接返回、或挂起等待一段时间、或永久等待,直到其他线程或中断释放该信号量。如果在参数 time 指定的时间内依然得不到信号量,线程将超时返回,返回值是 - RT_ETIMEOUT。
3. 释放信号量
释放信号量可以唤醒挂起在该信号量上的线程
rt_err_t rt_sem_release(rt_sem_t sem);

当信号量的值等于零时,并且有线程等待这个信号量时,释放信号量将唤醒等待在该信号量线程队列中的第一个线程,由它获取信号量;否则将把信号量的值加 1
4. 删除信号量
系统不再使用信号量时,可通过删除信号量以释放系统资源,适用于动态创建的信号量
rt_err_t rt_sem_delete(rt_sem_t sem);

调用这个函数时,系统将删除这个信号量。如果删除该信号量时,有线程正在等待该信号量,那么删除操作会先唤醒等待在该信号量上的线程(等待线程的返回值是 - RT_ERROR),然后再释放信号量的内存资源
5. 代码示例
这是一个信号量使用例程,该例程创建了一个动态信号量,初始化两个线程,一个线程发送信号量,一个线程接收到信号量后,执行相应的操作
#include <rtthread.h>#define THREAD_PRIORITY 25
#define THREAD_TIMESLICE 5/* 指向信号量的指针 */
static rt_sem_t dynamic_sem = RT_NULL;ALIGN(RT_ALIGN_SIZE)
static char thread1_stack[1024];
static struct rt_thread thread1;
static void rt_thread1_entry(void *parameter)
{static rt_uint8_t count = 0;while(1){if(count <= 100){count++;}elsereturn;/* count 每计数 10 次,就释放一次信号量 */if(0 == (count % 10)){rt_kprintf("t1 release a dynamic semaphore.\n");rt_sem_release(dynamic_sem);}}
}ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;
static void rt_thread2_entry(void *parameter)
{static rt_err_t result;static rt_uint8_t number = 0;while(1){/* 永久方式等待信号量,获取到信号量,则执行 number 自加的操作 */result = rt_sem_take(dynamic_sem, RT_WAITING_FOREVER);if (result != RT_EOK){rt_kprintf("t2 take a dynamic semaphore, failed.\n");rt_sem_delete(dynamic_sem);return;}else{number++;rt_kprintf("t2 take a dynamic semaphore. number = %d\n" ,number);}}
}/* 信号量示例的初始化 */
int semaphore_sample(void)
{/* 创建一个动态信号量,初始值是 0 */dynamic_sem = rt_sem_create("dsem", 0, RT_IPC_FLAG_PRIO);if (dynamic_sem == RT_NULL){rt_kprintf("create dynamic semaphore failed.\n");return -1;}else{rt_kprintf("create done. dynamic semaphore value = 0.\n");}rt_thread_init(&thread1,"thread1",rt_thread1_entry,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",rt_thread2_entry,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY-1, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(semaphore_sample, semaphore sample);
运行结果如下:
\ | /
- RT - Thread Operating System/ | \ 3.1.0 build Aug 27 20182006 - 2018 Copyright by rt-thread team
msh >semaphore_sample
create done. dynamic semaphore value = 0.
msh >t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 1
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 2
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 3
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 4
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 5
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 6
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 7
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 8
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 9
t1 release a dynamic semaphore.
t2 take a dynamic semaphore. number = 10二、互斥量
互斥量又叫相互排斥的信号量,是一种特殊的二值信号量。互斥量类似于只有一个车位的停车场:当有一辆车进入的时候,将停车场大门锁住,其他车辆在外面等候。当里面的车出来时,将停车场大门打开,下一辆车才可以进入。
互斥量和信号量不同的是:拥有互斥量的线程拥有互斥量的所有权,互斥量支持递归访问且能防止线程优先级翻转;并且互斥量只能由持有线程释放,而信号量则可以由任何线程释放。
互斥量的状态只有两种,开锁或闭锁(两种状态值)。当有线程持有它时,互斥量处于闭锁状态,由这个线程获得它的所有权。相反,当这个线程释放它时,将对互斥量进行开锁,失去它的所有权。当一个线程持有互斥量时,其他线程将不能够对它进行开锁或持有它,持有该互斥量的线程也能够再次获得这个锁而不被挂起
在 RT-Thread 操作系统中,互斥量可以解决优先级翻转问题,实现的是优先级继承协议 (Sha, 1990)。优先级继承是通过在线程 A 尝试获取共享资源而被挂起的期间内,将线程 C 的优先级提升到线程 A 的优先级别,从而解决优先级翻转引起的问题。这样能够防止 C(间接地防止 A)被 B 抢占,如下图所示。优先级继承是指,提高某个占有某种资源的低优先级线程的优先级,使之与所有等待该资源的线程中优先级最高的那个线程的优先级相等,然后执行,而当这个低优先级线程释放该资源时,优先级重新回到初始设定。因此,继承优先级的线程避免了系统资源被任何中间优先级的线程抢占。
1. 创建互斥量
创建一个互斥量时,内核首先创建一个互斥量控制块,然后完成对该控制块的初始化工作
rt_mutex_t rt_mutex_create (const char* name, rt_uint8_t flag);

注: 互斥量的 flag 标志已经作废,无论用户选择 RT_IPC_FLAG_PRIO 还是 RT_IPC_FLAG_FIFO,内核均按照 RT_IPC_FLAG_PRIO 处理
2. 获取互斥量
线程获取了互斥量,那么线程就有了对该互斥量的所有权,即某一个时刻一个互斥量只能被一个线程持有
rt_err_t rt_mutex_take (rt_mutex_t mutex, rt_int32_t time);

如果互斥量没有被其他线程控制,那么申请该互斥量的线程将成功获得该互斥量。如果互斥量已经被当前线程线程控制,则该互斥量的持有计数加 1,当前线程也不会挂起等待。如果互斥量已经被其他线程占有,则当前线程在该互斥量上挂起等待,直到其他线程释放它或者等待时间超过指定的超时时间
3. 释放互斥量
当线程完成互斥资源的访问后,应尽快释放它占据的互斥量,使得其他线程能及时获取该互斥量
rt_err_t rt_mutex_release(rt_mutex_t mutex);

使用该函数接口时,只有已经拥有互斥量控制权的线程才能释放它,每释放一次该互斥量,它的持有计数就减 1。当该互斥量的持有计数为零时(即持有线程已经释放所有的持有操作),它变为可用,等待在该信号量上的线程将被唤醒。如果线程的运行优先级被互斥量提升,那么当互斥量被释放后,线程恢复为持有互斥量前的优先级
4. 删除互斥量
当不再使用互斥量时,通过删除互斥量以释放系统资源,适用于动态创建的互斥量
rt_err_t rt_mutex_delete (rt_mutex_t mutex);

当删除一个互斥量时,所有等待此互斥量的线程都将被唤醒,等待线程获得的返回值是 - RT_ERROR。然后系统将该互斥量从内核对象管理器链表中删除并释放互斥量占用的内存空间
5. 代码示例
这是一个互斥量的应用例程,互斥锁是一种保护共享资源的方法。当一个线程拥有互斥锁的时候,可以保护共享资源不被其他线程破坏。下面用一个例子来说明,有两个线程:线程 1 和线程 2,线程 1 对 2 个 number 分别进行加 1 操作;线程 2 也对 2 个 number 分别进行加 1 操作,使用互斥量保证线程改变 2 个 number 值的操作不被打断
互斥量例程
#include <rtthread.h>#define THREAD_PRIORITY 8
#define THREAD_TIMESLICE 5/* 指向互斥量的指针 */
static rt_mutex_t dynamic_mutex = RT_NULL;
static rt_uint8_t number1,number2 = 0;ALIGN(RT_ALIGN_SIZE)
static char thread1_stack[1024];
static struct rt_thread thread1;
static void rt_thread_entry1(void *parameter)
{while(1){/* 线程 1 获取到互斥量后,先后对 number1、number2 进行加 1 操作,然后释放互斥量 */rt_mutex_take(dynamic_mutex, RT_WAITING_FOREVER);number1++;rt_thread_mdelay(10);number2++;rt_mutex_release(dynamic_mutex);}
}ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;
static void rt_thread_entry2(void *parameter)
{while(1){/* 线程 2 获取到互斥量后,检查 number1、number2 的值是否相同,相同则表示 mutex 起到了锁的作用 */rt_mutex_take(dynamic_mutex, RT_WAITING_FOREVER);if(number1 != number2){rt_kprintf("not protect.number1 = %d, mumber2 = %d \n",number1 ,number2);}else{rt_kprintf("mutex protect ,number1 = mumber2 is %d\n",number1);}number1++;number2++;rt_mutex_release(dynamic_mutex);if(number1>=50)return;}
}/* 互斥量示例的初始化 */
int mutex_sample(void)
{/* 创建一个动态互斥量 */dynamic_mutex = rt_mutex_create("dmutex", RT_IPC_FLAG_PRIO);if (dynamic_mutex == RT_NULL){rt_kprintf("create dynamic mutex failed.\n");return -1;}rt_thread_init(&thread1,"thread1",rt_thread_entry1,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",rt_thread_entry2,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY-1, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;
}/* 导出到 MSH 命令列表中 */
MSH_CMD_EXPORT(mutex_sample, mutex sample);运行结果如下:
\ | /
- RT - Thread Operating System/ | \ 3.1.0 build Aug 24 20182006 - 2018 Copyright by rt-thread team
msh >mutex_sample
msh >mutex protect ,number1 = mumber2 is 1
mutex protect ,number1 = mumber2 is 2
mutex protect ,number1 = mumber2 is 3
mutex protect ,number1 = mumber2 is 4
…
mutex protect ,number1 = mumber2 is 48
mutex protect ,number1 = mumber2 is 49防止优先级翻转特性例程
#include <rtthread.h>/* 指向线程控制块的指针 */
static rt_thread_t tid1 = RT_NULL;
static rt_thread_t tid2 = RT_NULL;
static rt_thread_t tid3 = RT_NULL;
static rt_mutex_t mutex = RT_NULL;#define THREAD_PRIORITY 10
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5/* 线程 1 入口 */
static void thread1_entry(void *parameter)
{/* 先让低优先级线程运行 */rt_thread_mdelay(100);/* 此时 thread3 持有 mutex,并且 thread2 等待持有 mutex *//* 检查 thread2 与 thread3 的优先级情况 */if (tid2->current_priority != tid3->current_priority){/* 优先级不相同,测试失败 */rt_kprintf("the priority of thread2 is: %d\n", tid2->current_priority);rt_kprintf("the priority of thread3 is: %d\n", tid3->current_priority);rt_kprintf("test failed.\n");return;}else{rt_kprintf("the priority of thread2 is: %d\n", tid2->current_priority);rt_kprintf("the priority of thread3 is: %d\n", tid3->current_priority);rt_kprintf("test OK.\n");}
}/* 线程 2 入口 */
static void thread2_entry(void *parameter)
{rt_err_t result;rt_kprintf("the priority of thread2 is: %d\n", tid2->current_priority);/* 先让低优先级线程运行 */rt_thread_mdelay(50);/** 试图持有互斥锁,此时 thread3 持有,应把 thread3 的优先级提升* 到 thread2 相同的优先级*/result = rt_mutex_take(mutex, RT_WAITING_FOREVER);if (result == RT_EOK){/* 释放互斥锁 */rt_mutex_release(mutex);}
}/* 线程 3 入口 */
static void thread3_entry(void *parameter)
{rt_tick_t tick;rt_err_t result;rt_kprintf("the priority of thread3 is: %d\n", tid3->current_priority);result = rt_mutex_take(mutex, RT_WAITING_FOREVER);if (result != RT_EOK){rt_kprintf("thread3 take a mutex, failed.\n");}/* 做一个长时间的循环,500ms */tick = rt_tick_get();while (rt_tick_get() - tick < (RT_TICK_PER_SECOND / 2)) ;rt_mutex_release(mutex);
}int pri_inversion(void)
{/* 创建互斥锁 */mutex = rt_mutex_create("mutex", RT_IPC_FLAG_PRIO);if (mutex == RT_NULL){rt_kprintf("create dynamic mutex failed.\n");return -1;}/* 创建线程 1 */tid1 = rt_thread_create("thread1",thread1_entry,RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY - 1, THREAD_TIMESLICE);if (tid1 != RT_NULL)rt_thread_startup(tid1);/* 创建线程 2 */tid2 = rt_thread_create("thread2",thread2_entry,RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY, THREAD_TIMESLICE);if (tid2 != RT_NULL)rt_thread_startup(tid2);/* 创建线程 3 */tid3 = rt_thread_create("thread3",thread3_entry,RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY + 1, THREAD_TIMESLICE);if (tid3 != RT_NULL)rt_thread_startup(tid3);return 0;
}/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(pri_inversion, prio_inversion sample);运行结果如下:
\ | /
- RT - Thread Operating System/ | \ 3.1.0 build Aug 27 20182006 - 2018 Copyright by rt-thread team
msh >pri_inversion
the priority of thread2 is: 10
the priority of thread3 is: 11
the priority of thread2 is: 10
the priority of thread3 is: 10
test OK.三、事件集
事件集主要用于线程间的同步,与信号量不同,它的特点是可以实现一对多,多对多的同步。即一个线程与多个事件的关系可设置为:其中任意一个事件唤醒线程,或几个事件都到达后才唤醒线程进行后续的处理;同样,事件也可以是多个线程同步多个事件。这种多个事件的集合可以用一个 32 位无符号整型变量来表示,变量的每一位代表一个事件,线程通过 “逻辑与” 或“逻辑或”将一个或多个事件关联起来,形成事件组合。事件的 “逻辑或” 也称为是独立型同步,指的是线程与任何事件之一发生同步;事件 “逻辑与” 也称为是关联型同步,指的是线程与若干事件都发生同步。
RT-Thread 定义的事件集有以下特点:
- 事件只与线程相关,事件间相互独立:每个线程可拥有 32 个事件标志,采用一个 32 bit 无符号整型数进行记录,每一个 bit 代表一个事件;
- 事件仅用于同步,不提供数据传输功能;
- 事件无排队性,即多次向线程发送同一事件 (如果线程还未来得及读走),其效果等同于只发送一次。
在 RT-Thread 中,每个线程都拥有一个事件信息标记,它有三个属性,分别是 RT_EVENT_FLAG_AND(逻辑与),RT_EVENT_FLAG_OR(逻辑或)以及 RT_EVENT_FLAG_CLEAR(清除标记)。当线程等待事件同步时,可以通过 32 个事件标志和这个事件信息标记来判断当前接收的事件是否满足同步条件。

线程 #1 的事件标志中第 1 位和第 30 位被置位,如果事件信息标记位设为逻辑与,则表示线程 #1 只有在事件 1 和事件 30 都发生以后才会被触发唤醒,如果事件信息标记位设为逻辑或,则事件 1 或事件 30 中的任意一个发生都会触发唤醒线程 #1。如果信息标记同时设置了清除标记位,则当线程 #1 唤醒后将主动把事件 1 和事件 30 清为零,否则事件标志将依然存在(即置 1)
1. 创建事件集
当创建一个事件集时,内核首先创建一个事件集控制块,然后对该事件集控制块进行基本的初始化
rt_event_t rt_event_create(const char* name, rt_uint8_t flag);

调用该函数接口时,系统会从对象管理器中分配事件集对象,并初始化这个对象,然后初始化父类 IPC 对象
2. 发送事件
发送事件函数可以发送事件集中的一个或多个事件
rt_err_t rt_event_send(rt_event_t event, rt_uint32_t set);

使用该函数接口时,通过参数 set 指定的事件标志来设定 event 事件集对象的事件标志值,然后遍历等待在 event 事件集对象上的等待线程链表,判断是否有线程的事件激活要求与当前 event 对象事件标志值匹配,如果有,则唤醒该线程
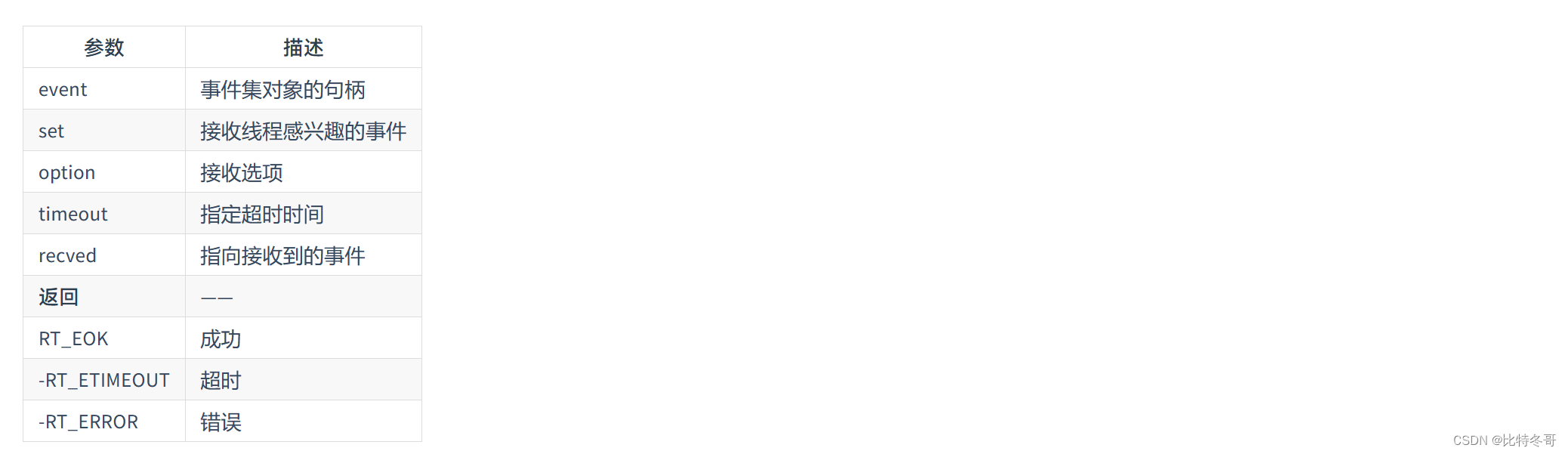
3. 接收事件
内核使用 32 位的无符号整数来标识事件集,它的每一位代表一个事件,因此一个事件集对象可同时等待接收 32 个事件,内核可以通过指定选择参数 “逻辑与” 或“逻辑或”来选择如何激活线程,使用 “逻辑与” 参数表示只有当所有等待的事件都发生时才激活线程,而使用 “逻辑或” 参数则表示只要有一个等待的事件发生就激活线程
rt_err_t rt_event_recv(rt_event_t event,rt_uint32_t set,rt_uint8_t option,rt_int32_t timeout,rt_uint32_t* recved);
当用户调用这个接口时,系统首先根据 set 参数和接收选项 option 来判断它要接收的事件是否发生,如果已经发生,则根据参数 option 上是否设置有 RT_EVENT_FLAG_CLEAR 来决定是否重置事件的相应标志位,然后返回(其中 recved 参数返回接收到的事件);如果没有发生,则把等待的 set 和 option 参数填入线程本身的结构中,然后把线程挂起在此事件上,直到其等待的事件满足条件或等待时间超过指定的超时时间。如果超时时间设置为零,则表示当线程要接受的事件没有满足其要求时就不等待,而直接返回 - RT_ETIMEOUT
option 的值可取:
/* 选择 逻辑与 或 逻辑或 的方式接收事件 */
RT_EVENT_FLAG_OR
RT_EVENT_FLAG_AND/* 选择清除重置事件标志位 */
RT_EVENT_FLAG_CLEAR4. 删除事件集
系统不再使用 rt_event_create() 创建的事件集对象时,通过删除事件集对象控制块来释放系统资源
rt_err_t rt_event_delete(rt_event_t event);

5. 代码示例
这是事件集的应用例程,例子中初始化了一个事件集,两个线程。一个线程等待自己关心的事件发生,另外一个线程发送事件
#include <rtthread.h>#define THREAD_PRIORITY 9
#define THREAD_TIMESLICE 5#define EVENT_FLAG3 (1 << 3)
#define EVENT_FLAG5 (1 << 5)/* 事件控制块 */
static struct rt_event event;ALIGN(RT_ALIGN_SIZE)
static char thread1_stack[1024];
static struct rt_thread thread1;/* 线程 1 入口函数 */
static void thread1_recv_event(void *param)
{rt_uint32_t e;/* 第一次接收事件,事件 3 或事件 5 任意一个可以触发线程 1,接收完后清除事件标志 */if (rt_event_recv(&event, (EVENT_FLAG3 | EVENT_FLAG5),RT_EVENT_FLAG_OR | RT_EVENT_FLAG_CLEAR,RT_WAITING_FOREVER, &e) == RT_EOK){rt_kprintf("thread1: OR recv event 0x%x\n", e);}rt_kprintf("thread1: delay 1s to prepare the second event\n");rt_thread_mdelay(1000);/* 第二次接收事件,事件 3 和事件 5 均发生时才可以触发线程 1,接收完后清除事件标志 */if (rt_event_recv(&event, (EVENT_FLAG3 | EVENT_FLAG5),RT_EVENT_FLAG_AND | RT_EVENT_FLAG_CLEAR,RT_WAITING_FOREVER, &e) == RT_EOK){rt_kprintf("thread1: AND recv event 0x%x\n", e);}rt_kprintf("thread1 leave.\n");
}ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;/* 线程 2 入口 */
static void thread2_send_event(void *param)
{rt_kprintf("thread2: send event3\n");rt_event_send(&event, EVENT_FLAG3);rt_thread_mdelay(200);rt_kprintf("thread2: send event5\n");rt_event_send(&event, EVENT_FLAG5);rt_thread_mdelay(200);rt_kprintf("thread2: send event3\n");rt_event_send(&event, EVENT_FLAG3);rt_kprintf("thread2 leave.\n");
}int event_sample(void)
{rt_err_t result;/* 初始化事件对象 */result = rt_event_init(&event, "event", RT_IPC_FLAG_PRIO);if (result != RT_EOK){rt_kprintf("init event failed.\n");return -1;}rt_thread_init(&thread1,"thread1",thread1_recv_event,RT_NULL,&thread1_stack[0],sizeof(thread1_stack),THREAD_PRIORITY - 1, THREAD_TIMESLICE);rt_thread_startup(&thread1);rt_thread_init(&thread2,"thread2",thread2_send_event,RT_NULL,&thread2_stack[0],sizeof(thread2_stack),THREAD_PRIORITY, THREAD_TIMESLICE);rt_thread_startup(&thread2);return 0;
}/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(event_sample, event sample);运行结果如下:
\ | /
- RT - Thread Operating System/ | \ 3.1.0 build Aug 24 20182006 - 2018 Copyright by rt-thread team
msh >event_sample
thread2: send event3
thread1: OR recv event 0x8
thread1: delay 1s to prepare the second event
msh >thread2: send event5
thread2: send event3
thread2 leave.
thread1: AND recv event 0x28
thread1 leave.相关文章:
RT-Thread 线程间同步【信号量、互斥量、事件集】
线程间同步 一、信号量1. 创建信号量2. 获取信号量3. 释放信号量4. 删除信号量5. 代码示例 二、互斥量1. 创建互斥量2. 获取互斥量3. 释放互斥量4. 删除互斥量5. 代码示例 三、事件集1. 创建事件集2. 发送事件3. 接收事件4. 删除事件集5. 代码示例 简单来说,同步就是…...
B 树和 B+树 的区别
文章目录 B 树和 B树 的区别 B 树和 B树 的区别 了解二叉树、AVL 树、B 树的概念 B 树和 B树的应用场景 B 树是一种多路平衡查找树,为了更形象的理解。 二叉树,每个节点支持两个分支的树结构,相比于单向链表,多了一个分支。 …...

Go iota简介
当声明枚举类型或定义一组相关常量时,Go语言中的iota关键字可以帮助我们简化代码并自动生成递增的值。本文档将详细介绍iota的用法和行为。 iota关键字 iota是Go语言中的一个预定义标识符,它用于创建自增的无类型整数常量。iota的行为类似于一个计数器…...
PyQt6库和工具库QTDesigner安装与配置
锋哥原创的PyQt6视频教程: 2024版 PyQt6 Python桌面开发 视频教程(无废话版) 玩命更新中~_哔哩哔哩_bilibili2024版 PyQt6 Python桌面开发 视频教程(无废话版) 玩命更新中~共计12条视频,包括:2024版 PyQt6 Python桌面开发 视频教程(无废话版…...

性能测试:系统架构性能优化思路
今天谈下业务系统性能问题分析诊断和性能优化方面的内容。这篇文章重点还是谈已经上线的业务系统后续出现性能问题后的问题诊断和优化重点。 系统性能问题分析流程 我们首先来分析下如果一个业务系统上线前没有性能问题,而在上线后出现了比较严重的性能问题&#x…...

python字符串格式化
字符串格式化 # 2023年11月16日 星期四 y 2023 m 11 d 16 w 四 s %d年%d月%d日 星期%s%(y,m,d,w) print(s) s {}年{}月{}日 星期{}.format(y,m,d,w) print(s) s f{y}年{m}月{d}日 星期{w} print(s)...
Linux的基本指令(二)
目录 前言 学前补充 touch指令 mkdir指令 rmdir指令 rm指令 通配符* man指令 cp指令 mv指令(重要) 补充内容: 1、如何快速在Linux中写出代码 2、如何看待如此多的Linux指令 cat指令 前言 关于Linux的基本指令我们会分三到四篇文章进行分析,…...
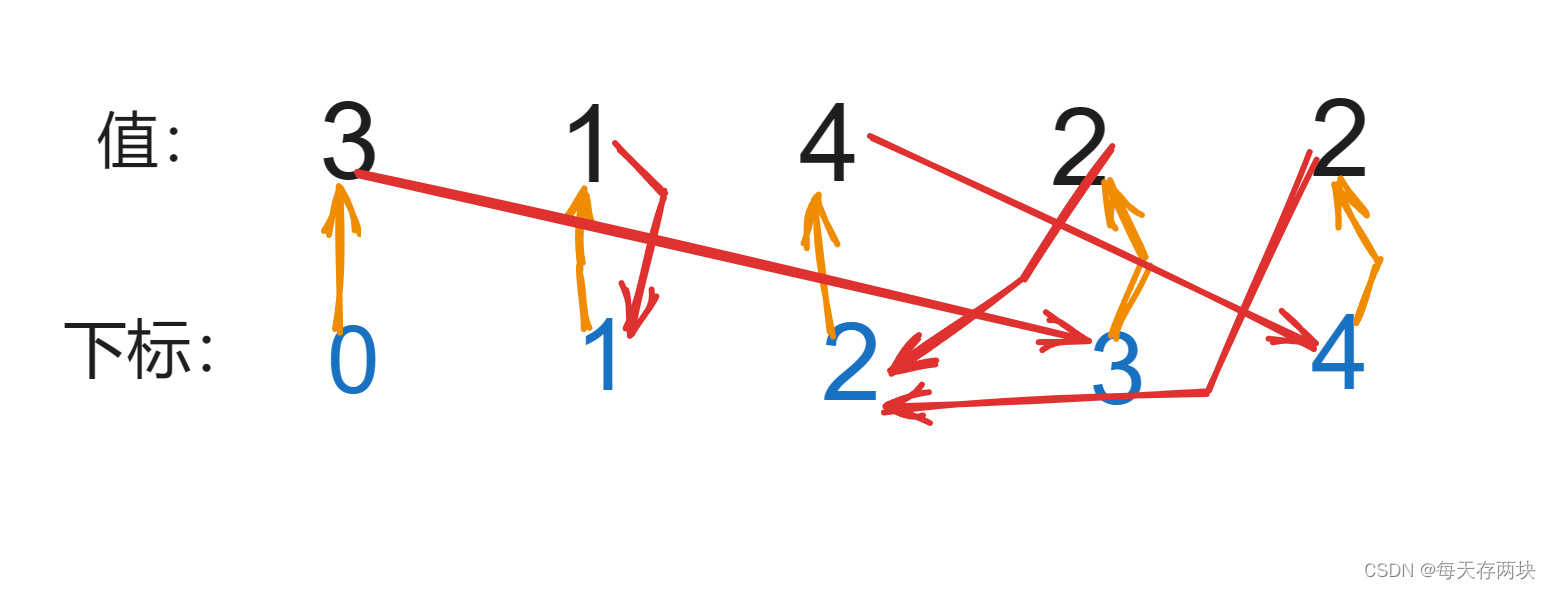
每日一题--寻找重复数
蝶恋花-王国维 阅尽天涯离别苦, 不道归来,零落花如许。 花底相看无一语,绿窗春与天俱莫。 待把相思灯下诉, 一缕新欢,旧恨千千缕。 最是人间留不住,朱颜辞镜花辞树。 目录 题目描述: 思路分析…...
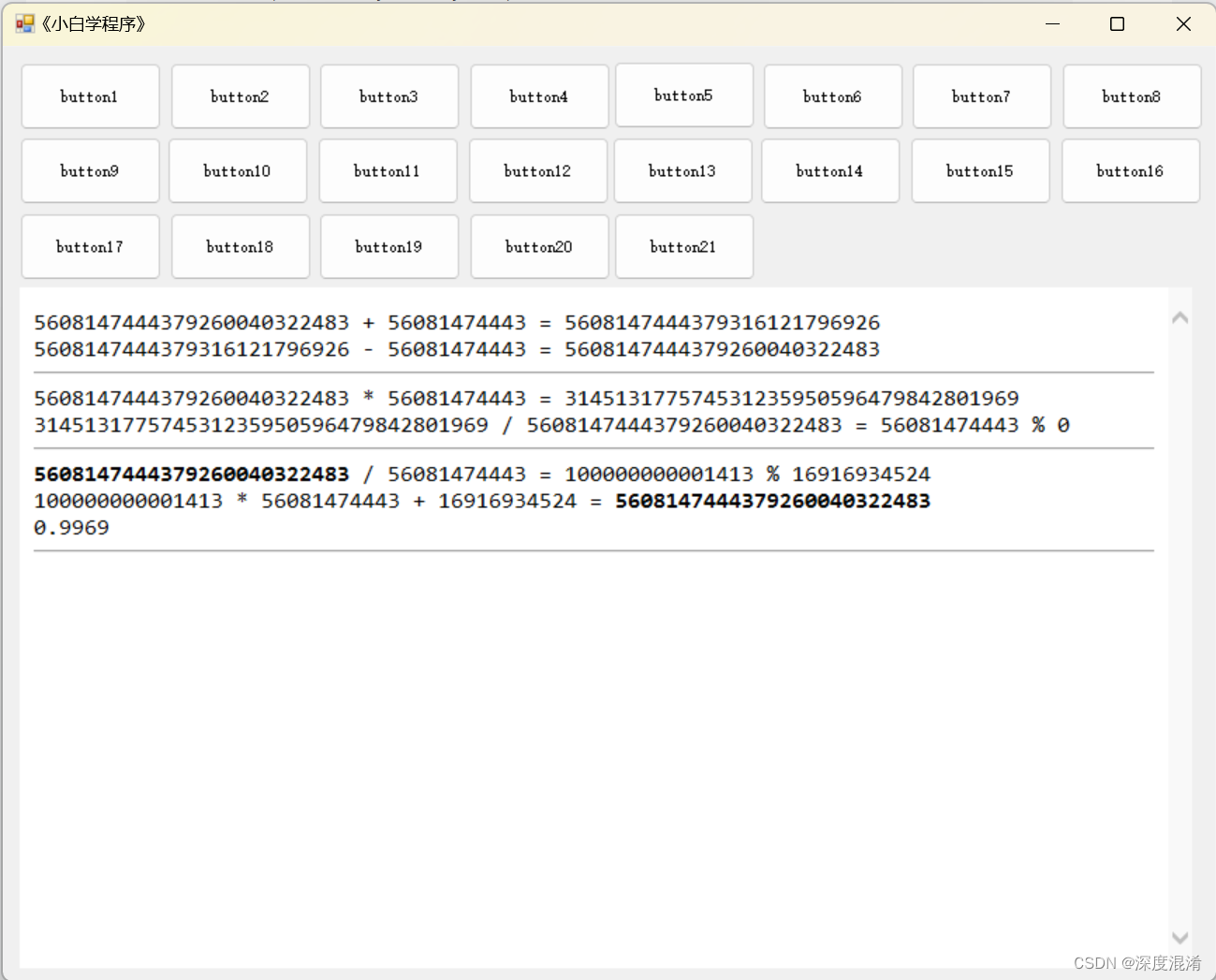
C#,《小白学程序》第二十二课:大数的乘法(BigInteger Multiply)
1 文本格式 using System; using System.Linq; using System.Text; using System.Collections.Generic; /// <summary> /// 大数的(加减乘除)四则运算、阶乘运算 /// 乘法计算包括小学生算法、Karatsuba和Toom-Cook3算法 /// </summary> p…...
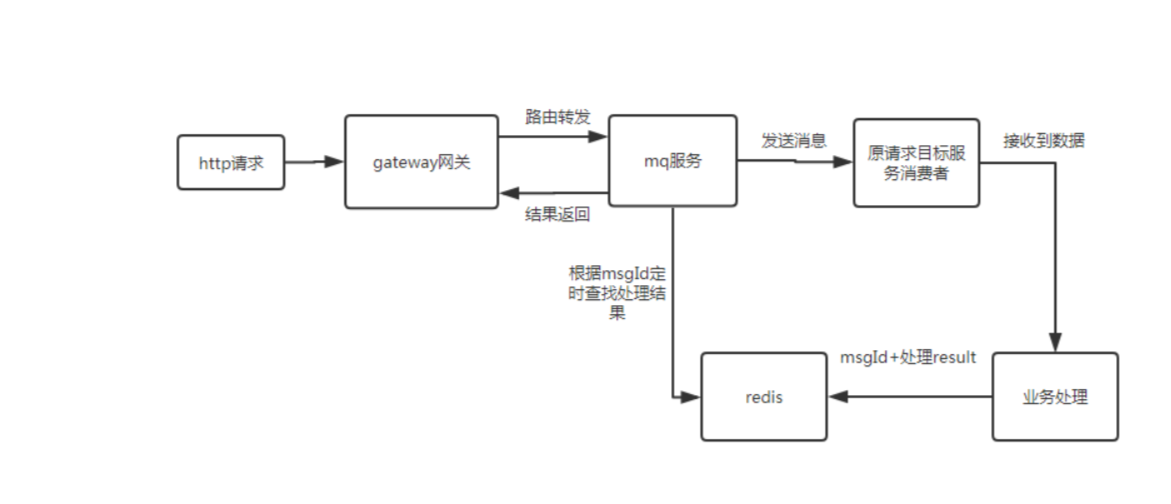
kafka,RabbitMQ,RocketMQ,他们之间的区别,架构,如何保证消息的不丢失,保证不重复消费,保证消息的有序性
文章目录 Kafka、RabbitMQ、RocketMQ 之间的区别是什么?性能数据可靠性服务可用性功能 RabbitMQ如何保证消息不丢失?Kafka 的架构说一下?Kafka 怎么保证消息是有序的?Kafka 怎么解决重复消费?Kafka 怎么保证消息不丢失…...

uni-app中vue3+setup实现下拉刷新、上拉加载更多效果
在小程序或各类app中,下拉刷新和上拉加载更多是极为常见和使用非常频繁的两个功能,通过对这两个功能的合理使用可以极大的方便用户进行操作。 合理的设计逻辑才能更容易挽留住用户,因为这些细节性的小功能点就变得极为重要起来。 那么在uni…...
微服务实战系列之Nginx(技巧篇)
前言 今天北京早晨竟然飘了一些“雪花”,定睛一看,似雪非雪,像泡沫球一样,原来那叫“霰”。 自然中,雨雪霜露雾,因为出场太频繁,认识门槛较低,自然不费吹灰之力,即可享受…...

好工具|datamap,一个好用的地图可视化Excel插件,在Excel中实现地理编码、拾取坐标
在做VRP相关研究的时候,需要对地图数据做很多处理,比如地理编码,根据“重庆市沙坪坝区沙正街174号”这样的一个文本地址知道他的经纬度;再比如绘制一些散点图,根据某个位置的经纬度在地图上把它标注出来。还有有的时候…...

Java——继承
继承是面向对象编程的三大特征之一,它让我们更加容易实现对已有类的扩展、更加容易实现对现实世界的建模。 继承有两个主要作用: 代码复用,更加容易实现类的扩展方便建模 继承的实现 继承让我们更加容易实现对类的扩展。比如我们定义了人…...

十、sdl显示yuv图片
前言 SDL中内置加载BMP的API,使用起来会更加简单,便于初学者学习使用SDL 如果需要加载JPG、PNG等其他格式的图片,可以使用第三方库:SDL_image 测试环境: ffmpeg的4.3.2自行编译版本windows环境qt5.12sdl2.0.22&…...

Docker Nginx容器部署vue项目
Docker Nginx容器部署vue项目 文章目录 Docker Nginx容器部署vue项目1. 前提2. 下载nginx镜像3. 编写nginx.conf配置文件4. 编写构建命令5. vue项目上传 1. 前提 Docker服务已部署 2. 下载nginx镜像 首先查看有没有nginx镜像 docker images没有的情况下再进行下载 docker …...
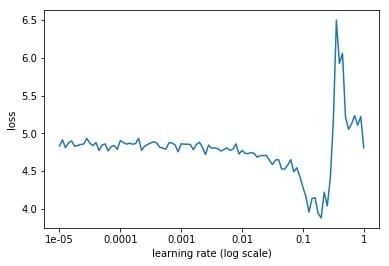
【深度学习】如何找到最优学习率
经过了大量炼丹的同学都知道,超参数是一个非常玄乎的东西,比如batch size,学习率等,这些东西的设定并没有什么规律和原因,论文中设定的超参数一般都是靠经验决定的。但是超参数往往又特别重要,比如学习率&a…...
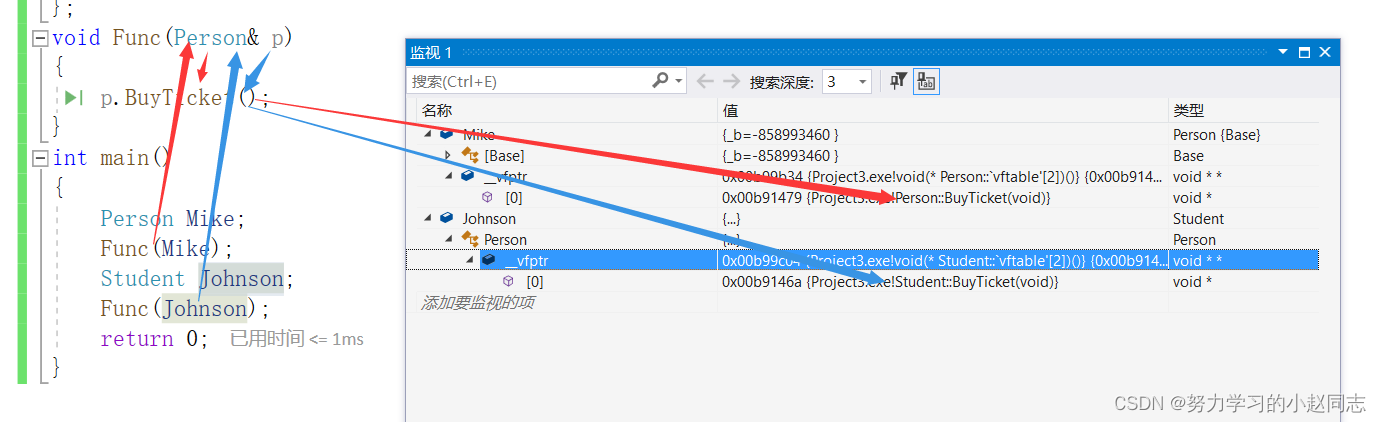
详解—C++三大特性——多态
目录 一. 多态的概念 1.1 概念 二. 多态的定义及实现 2.1多态的构成条件 2.2 虚函数 2.3虚函数的重写 2.3.1虚函数重写的两个例外: 1. 协变(基类与派生类虚函数返回值类型不同) 2. 析构函数的重写(基类与派生类析构函数的名字不同) 2.4 C11 override 和 f…...

用idea搭建一个spring cloud微服务项目
以下是使用 IntelliJ IDEA 搭建 Spring Cloud 微服务项目的步骤: 创建一个新的 Maven 项目。 在 pom.xml 文件中添加以下依赖: <dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-…...
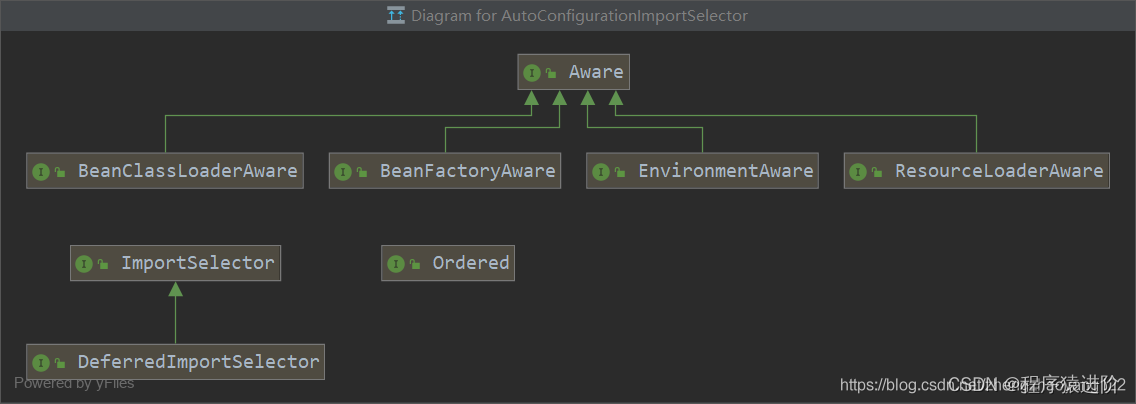
SpringBoot——启动类的原理
优质博文:IT-BLOG-CN SpringBoot启动类上使用SpringBootApplication注解,该注解是一个组合注解,包含多个其它注解。和类定义SpringApplication.run要揭开SpringBoot的神秘面纱,我们要从这两位开始就可以了。 SpringBootApplicati…...
)
SPSS老版本用户必看:如何用R3.2.5实现高级统计分析(附完整语法示例)
SPSS老版本用户必看:如何用R3.2.5实现高级统计分析(附完整语法示例) 对于长期使用SPSS老版本的研究者来说,面对日益复杂的数据分析需求时,常常会遇到软件功能受限的困境。特别是在临床医学和社会科学研究中,…...

HarmonyOS6 半年磨一剑 - RcSwitch 组件尺寸系统与宽度计算机制深度剖析
文章目录前言一、三档语义化尺寸1.1 预设尺寸与像素映射1.2 数字类型直传二、宽度计算:独立参数与比例推算2.1 switchWidth 优先级2.2 黄金比例 1.82.3 自定义宽度的典型场景三、圆点尺寸计算:switchSpace 的作用3.1 间距参数的意义3.2 三个间距档位的视…...

2025届最火的六大降重复率助手推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 能降低AIGC检测率的关键之处在于模拟人类写作所具备的自然性以及逻辑跳跃。其一,…...

Unity UXML和USS实战:像搭积木一样设计你的第一个编辑器窗口
Unity UXML与USS模块化开发指南:构建可维护的编辑器界面 在Unity编辑器扩展开发中,界面设计往往成为制约开发效率的瓶颈。传统IMGUI虽然灵活,但维护成本随界面复杂度呈指数级增长。UI Toolkit带来的UXML/USS工作流,正在重塑Unity工…...

解锁B站4K视频下载:bilibili-downloader开源工具完全指南
解锁B站4K视频下载:bilibili-downloader开源工具完全指南 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 在数字内容爆炸的…...
原理与在YOLOv11中的集成)
可变形卷积(Deformable Convolution)原理与在YOLOv11中的集成
上周在产线测试YOLOv11的缺陷检测模型,遇到个头疼的问题:同一类金属件,因为冲压模具磨损导致边缘出现轻微形变,模型漏检率突然飙升。常规的卷积核是固定网格采样,对这类几何形变缺乏适应性。调了一整天数据增强&#x…...

2026届毕业生推荐的十大AI辅助论文平台解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于学术写作范畴之内,论文AI工具已然变成提高研究效率的关键辅助法子。当下主流工…...

新手福音:用claude code和快马平台开启你的Python编程第一课
最近在帮朋友入门Python编程时,发现很多新手都会遇到类似的问题:看教程时觉得简单,但自己动手写代码就无从下手。经过几次尝试,我发现用InsCode(快马)平台结合claude code生成的教学项目,能很好地解决这个痛点。下面分…...
)
微信聊天记录导出恢复/备份/离线查看工具(支持最新版4.1及以上)
微信聊天记录在电脑中加密存储,官方并未提供直接导出功能。 本软件可将电脑版微信的全部聊天内容批量导出,方便备份存档,即使后期不登录微信,也能快速查阅历史记录。 支持最新版电脑微信4.1.x及以上。 软件还支持尝试恢复已删除…...

黑苹果配置自动化:OpCore-Simplify实现EFI智能生成的技术革命
黑苹果配置自动化:OpCore-Simplify实现EFI智能生成的技术革命 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 为什么90%的黑苹果配置失败源…...