单片机调试技巧--栈回溯

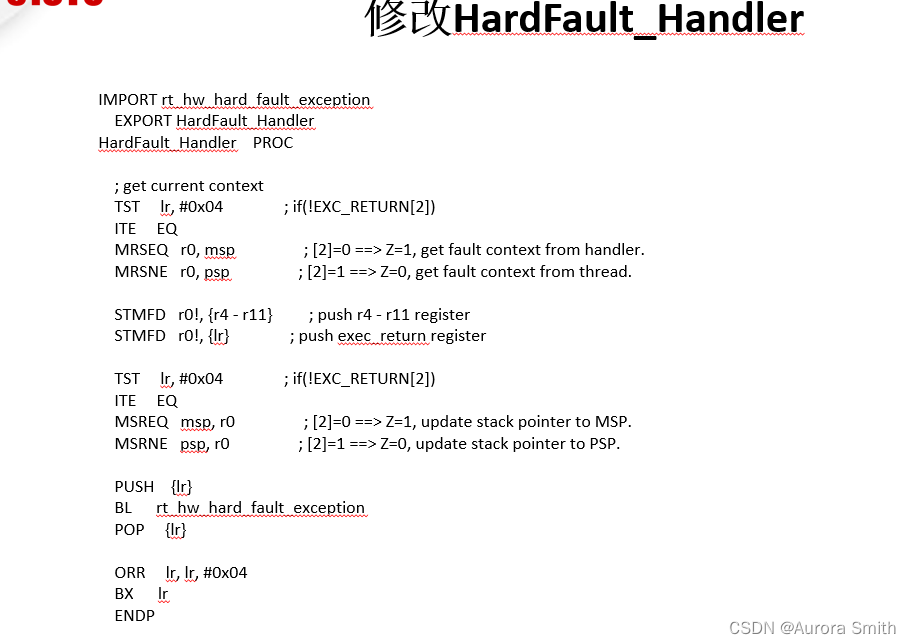
在启动文件中修改
IMPORT rt_hw_hard_fault_exceptionEXPORT HardFault_Handler
HardFault_Handler PROC; get current contextTST lr, #0x04 ; if(!EXC_RETURN[2])ITE EQMRSEQ r0, msp ; [2]=0 ==> Z=1, get fault context from handler.MRSNE r0, psp ; [2]=1 ==> Z=0, get fault context from thread.STMFD r0!, {r4 - r11} ; push r4 - r11 registerSTMFD r0!, {lr} ; push exec_return registerTST lr, #0x04 ; if(!EXC_RETURN[2])ITE EQMSREQ msp, r0 ; [2]=0 ==> Z=1, update stack pointer to MSP.MSRNE psp, r0 ; [2]=1 ==> Z=0, update stack pointer to PSP.PUSH {lr}BL rt_hw_hard_fault_exceptionPOP {lr}ORR lr, lr, #0x04BX lrENDP 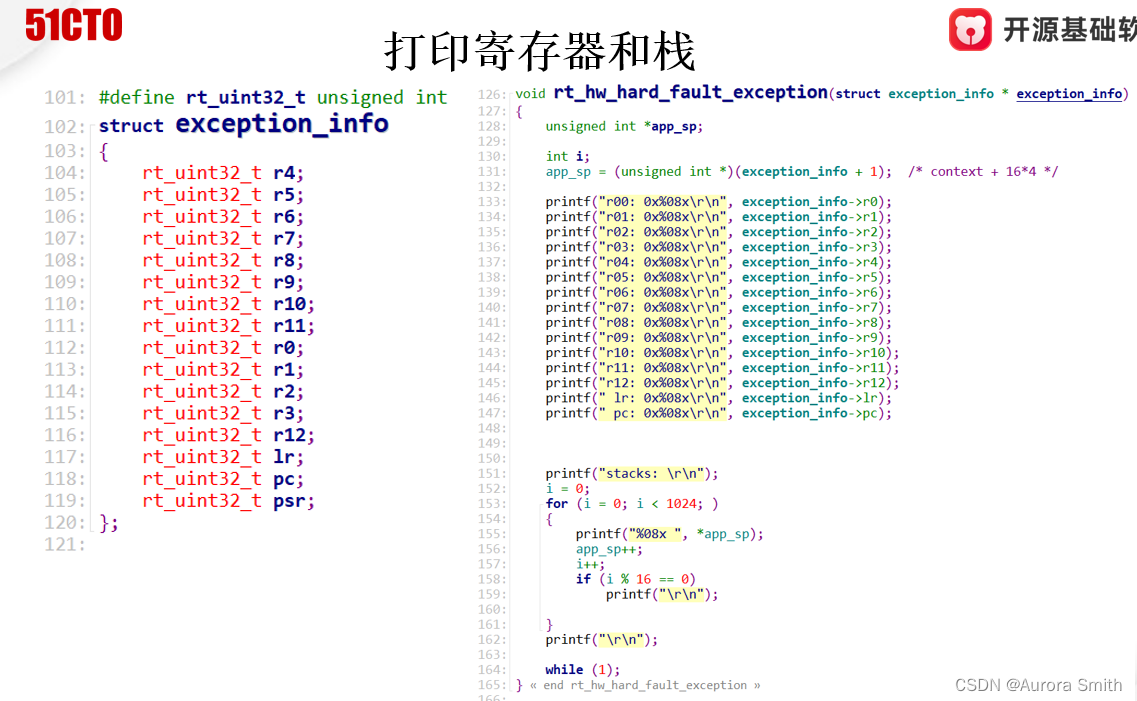
调用的硬件中断函数
#define rt_uint32_t unsigned int
struct exception_info
{rt_uint32_t exc_return;rt_uint32_t r4;rt_uint32_t r5;rt_uint32_t r6;rt_uint32_t r7;rt_uint32_t r8;rt_uint32_t r9;rt_uint32_t r10;rt_uint32_t r11;rt_uint32_t r0;rt_uint32_t r1;rt_uint32_t r2;rt_uint32_t r3;rt_uint32_t r12;rt_uint32_t lr;rt_uint32_t pc;rt_uint32_t psr;
};/** fault exception handler*/
void rt_hw_hard_fault_exception(struct exception_info * exception_info)
{unsigned int *app_sp;int i;app_sp = (unsigned int *)(exception_info + 1); /* context + 16*4 */printf("psr: 0x%08x\r\n", exception_info->psr);printf("r00: 0x%08x\r\n", exception_info->r0);printf("r01: 0x%08x\r\n", exception_info->r1);printf("r02: 0x%08x\r\n", exception_info->r2);printf("r03: 0x%08x\r\n", exception_info->r3);printf("r04: 0x%08x\r\n", exception_info->r4);printf("r05: 0x%08x\r\n", exception_info->r5);printf("r06: 0x%08x\r\n", exception_info->r6);printf("r07: 0x%08x\r\n", exception_info->r7);printf("r08: 0x%08x\r\n", exception_info->r8);printf("r09: 0x%08x\r\n", exception_info->r9);printf("r10: 0x%08x\r\n", exception_info->r10);printf("r11: 0x%08x\r\n", exception_info->r11);printf("r12: 0x%08x\r\n", exception_info->r12);printf(" lr: 0x%08x\r\n", exception_info->lr);printf(" pc: 0x%08x\r\n", exception_info->pc);printf("stacks: \r\n");i = 0;for (i = 0; i < 1024; ){printf("%08x ", *app_sp);app_sp++;i++;if (i % 16 == 0)printf("\r\n");}printf("\r\n");while (1);
}main.c中
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "driver_usart.h"
#include "driver_key.h"
#include <stdio.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void MX_FREERTOS_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
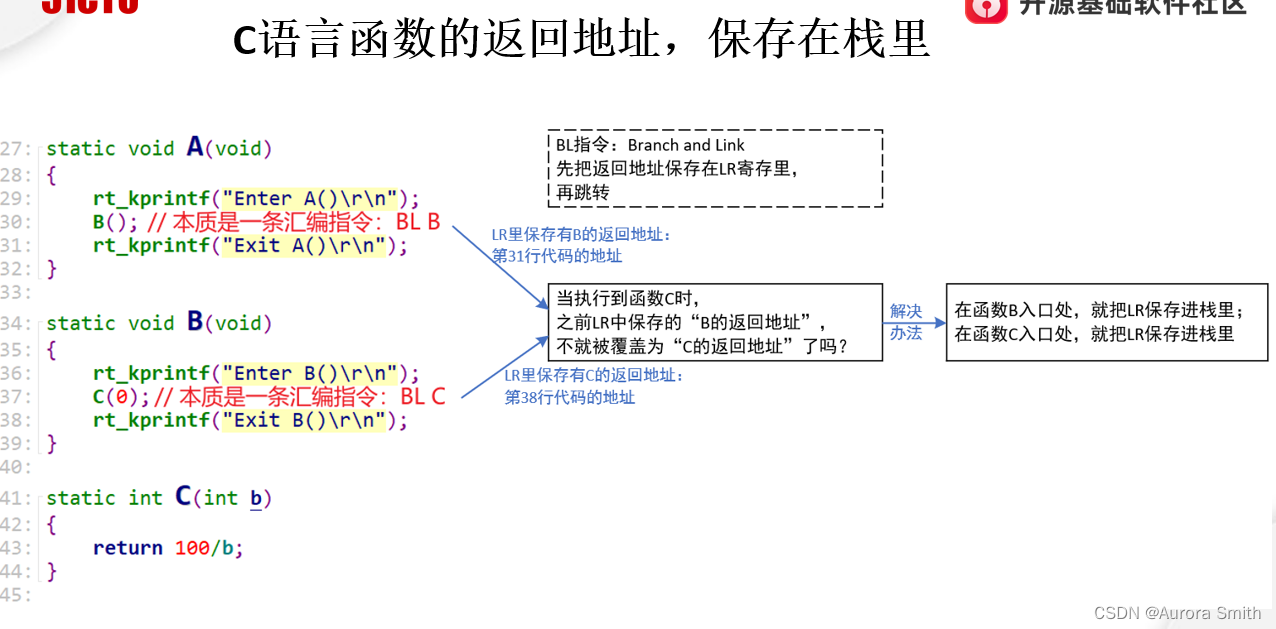
/* USER CODE BEGIN 0 */ring_buffer test_buffer;static void A(void);
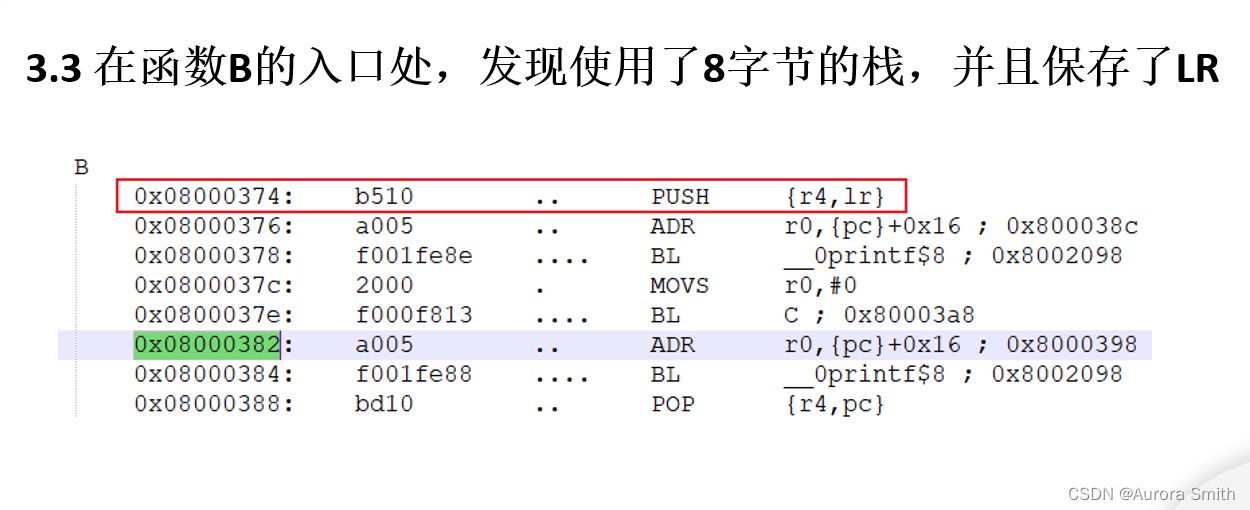
static void B(void);
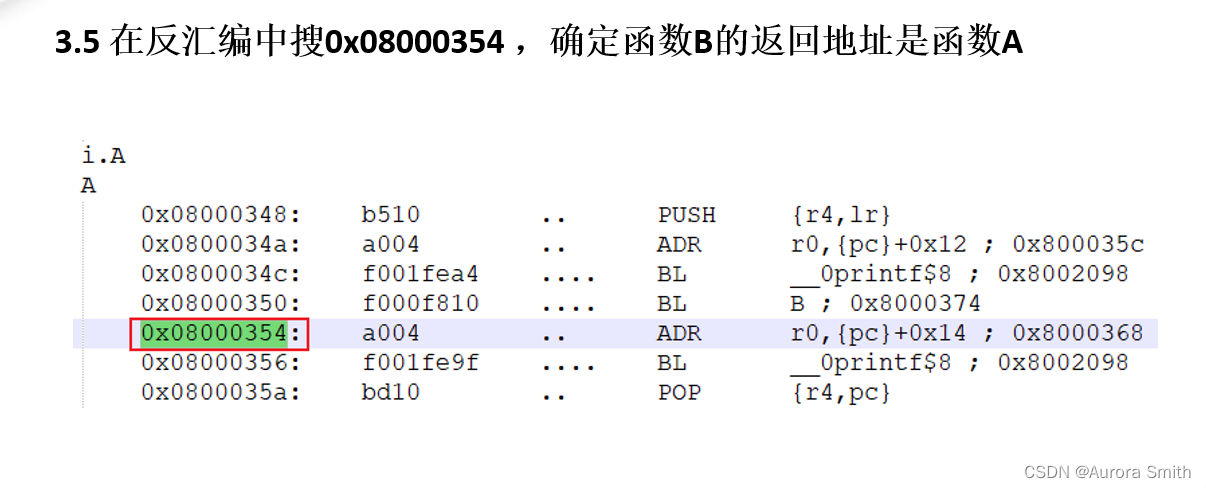
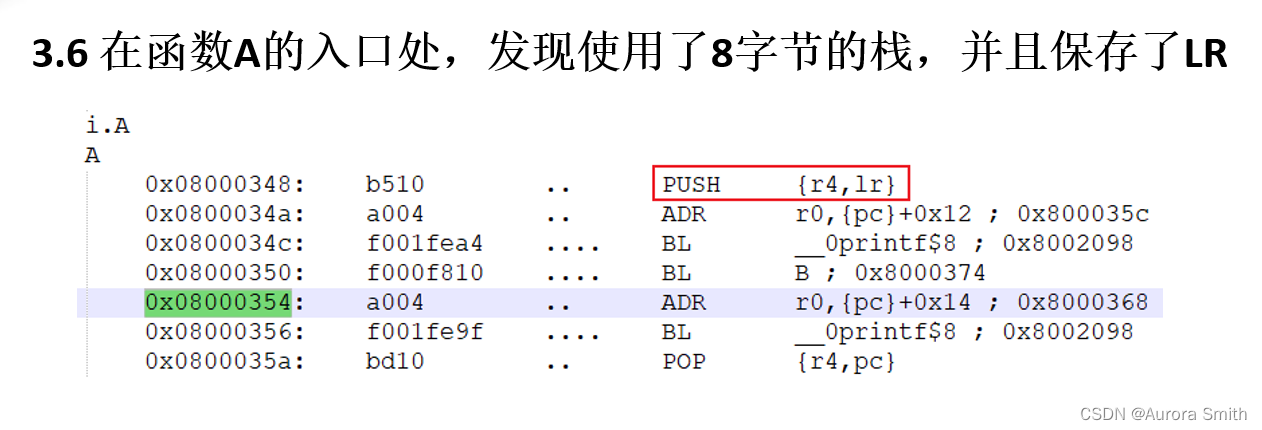
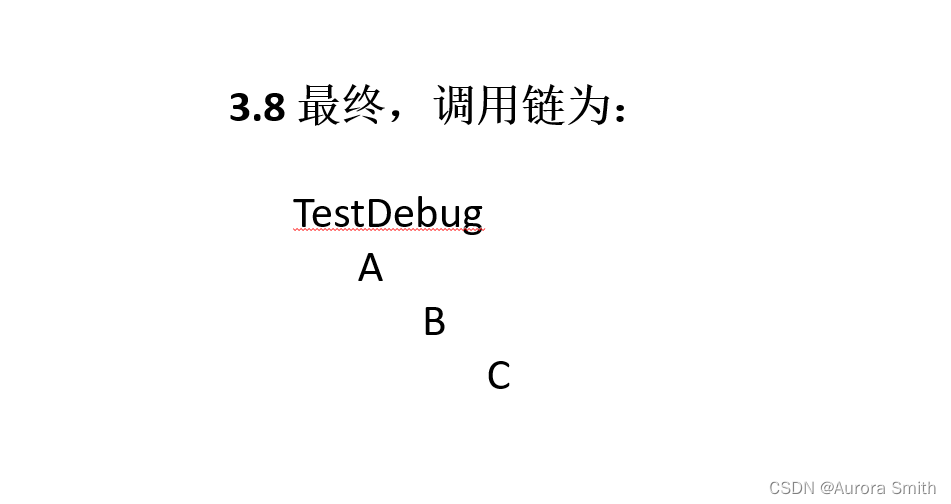
static int C(int b);static void A(void)
{printf("Enter A()\r\n");B();printf("Exit A()\r\n");
}static void B(void)
{printf("Enter B()\r\n");C(0);printf("Exit B()\r\n");
}static int C(int b)
{return 100/b;
}static void D(void)
{ printf("Enter D()\r\n");C(1);printf("Exit D()\r\n");
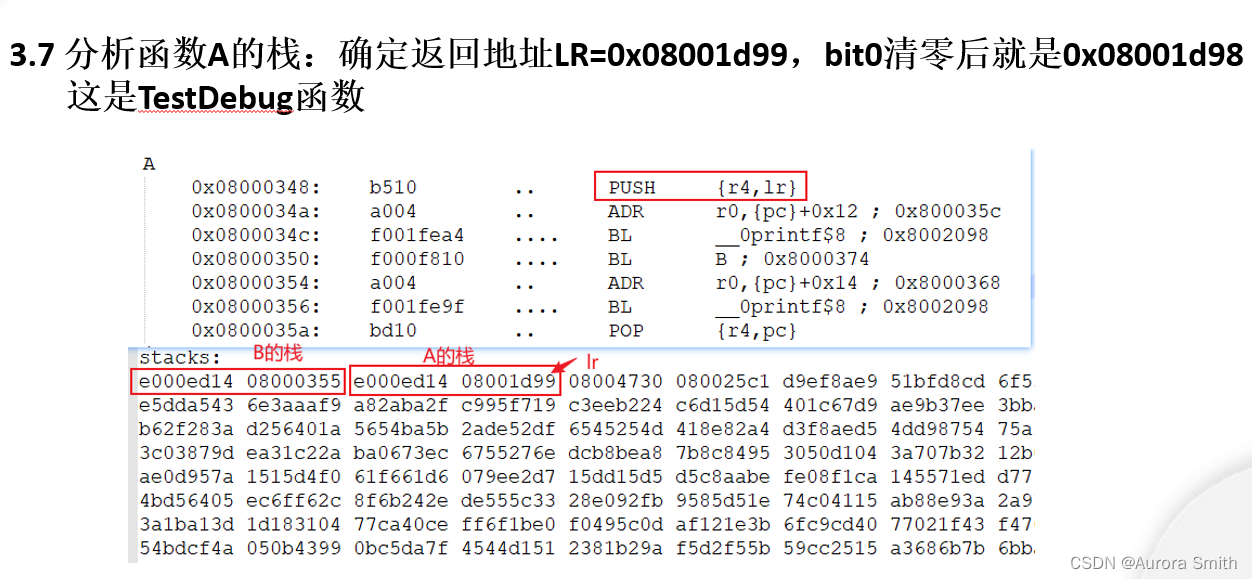
}void TestDebug(void)
{/* 100ask add *//* 使能除0错误* CCR(0xE000ED14)的bit4(DIV_0_TRP)设置为1*/volatile int *CCR = (volatile int *)0xE000ED14;*CCR |= (1<<4);A();D();
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_USART3_UART_Init();/* USER CODE BEGIN 2 */KEY_GPIO_ReInit();ring_buffer_init(&test_buffer);EnableDebugIRQ();printf("Hello World!\r\n");TestDebug();/* USER CODE END 2 *//* Init scheduler */osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */MX_FREERTOS_Init();/* Start scheduler */osKernelStart();/* We should never get here as control is now taken by the scheduler *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief Period elapsed callback in non blocking mode* @note This function is called when TIM8 interrupt took place, inside* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment* a global variable "uwTick" used as application time base.* @param htim : TIM handle* @retval None*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* USER CODE BEGIN Callback 0 *//* USER CODE END Callback 0 */if (htim->Instance == TIM8) {HAL_IncTick();}/* USER CODE BEGIN Callback 1 *//* USER CODE END Callback 1 */
}/*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/

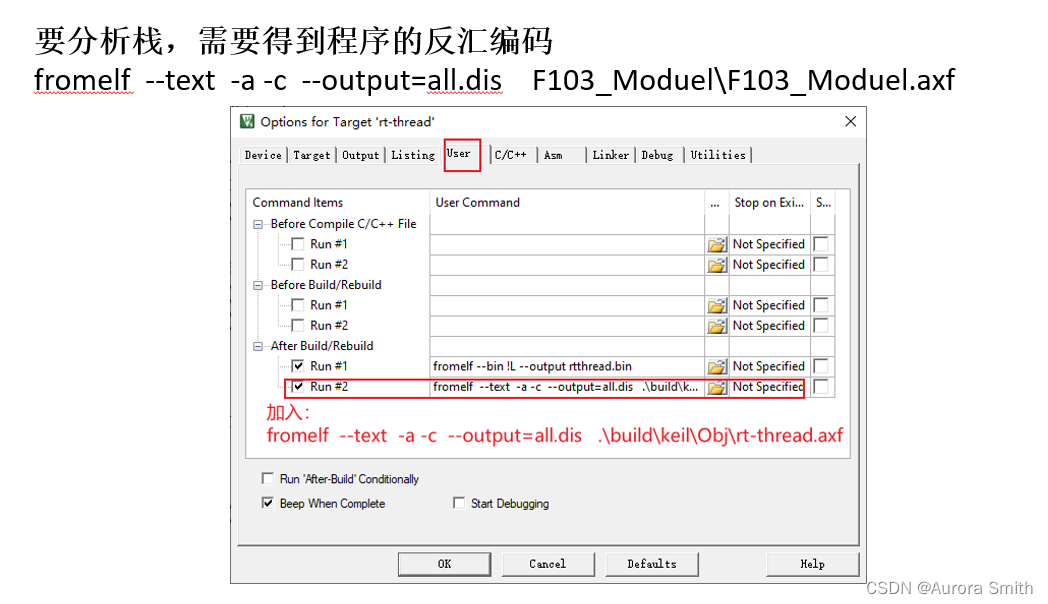
fromelf --text -a -c --output=xxx.dis Objects\xxx.axf

相关文章:
单片机调试技巧--栈回溯
在启动文件中修改 IMPORT rt_hw_hard_fault_exceptionEXPORT HardFault_Handler HardFault_Handler PROC; get current contextTST lr, #0x04 ; if(!EXC_RETURN[2])ITE EQMRSEQ r0, msp ; [2]0 > Z1, get fault context from h…...
分布式锁之基于redis实现分布式锁(二)
2. 基于redis实现分布式锁 2.1. 基本实现 借助于redis中的命令setnx(key, value),key不存在就新增,存在就什么都不做。同时有多个客户端发送setnx命令,只有一个客户端可以成功,返回1(true);其他…...
,长字符串换行办法)
python中%s的用法(字符串变量赋值办法),长字符串换行办法
参考: http://wap.mobiletrain.org/about/BBS/142752.html https://blog.csdn.net/PolarisRisingWar/article/details/131134627 https://baijiahao.baidu.com/s?id1756094563884490493&wfrspider&forpc 字符串变量赋值 "Hello, %s. Today is %s.&q…...

【Mybatis】预编译/即时sql 数据库连接池
回顾 Mybatis是一个持久层框架.有两种方式(这两种方式可以共存) 1.注解 2.xml 一.传递参数 以使用#{} 来接受参数为例 (以上两种方式一样适用的) 1)传递单个参数 #{} 可以为任意名称 2)多个参数 默认的参数名称就是接口方法声明的形参 3)参数为对象 默认给每个对象的每个属性都…...
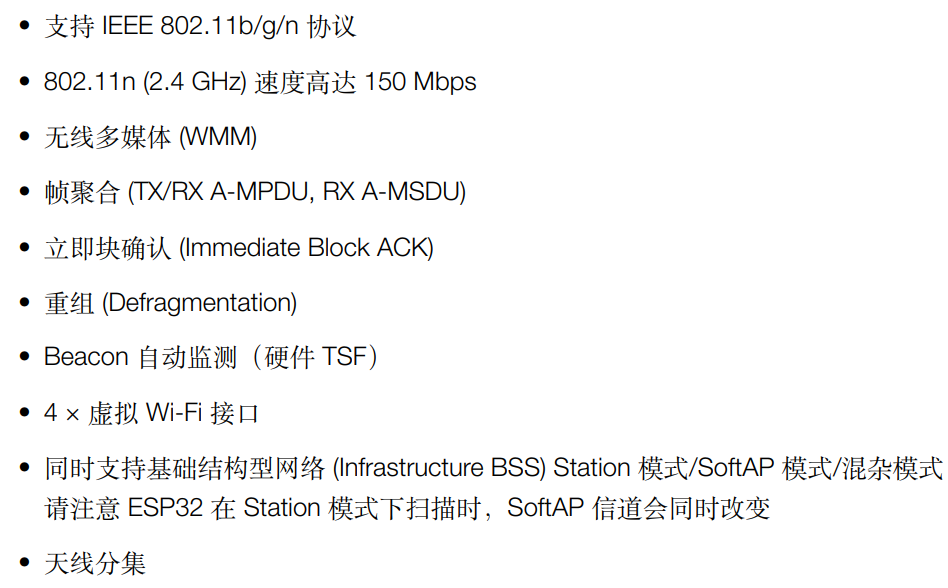
物联网AI 无线连接学习之WiFi基础篇 802.11协议发展
学物联网,来万物简单IoT物联网!! 前言 随着物联网行业不断发展,WiFi技术的发展在其中起着非常关键的作用,也是我们日常生活中使用非常广泛的无线网络技术之一,现在我们随便买一个家用电子产品,…...

FreeRTOS-队列Queue
队列Queue 队列Queue可以用在“任务到任务”、“任务到中断”、“中断到任务”直接传输信息。 队列的阻塞访问(可指定超时时间) 只要知道队列的句柄,任务、ISR都可以读、写该队列。任务读写队列时,如果读写成功了就马上进入就绪态…...

车内总线通信技术简述
1. 前言 本文主要分享一些汽车总线通信技术(CAN、CANFD、LIN、Flex Ray、MOST、LVDS、TTP/C、Ethernet),希望对大家能有所帮助。 2. 多种汽车总线通信技术 2.1 CAN CAN(Controller Area Network)全称为“控制器局域…...
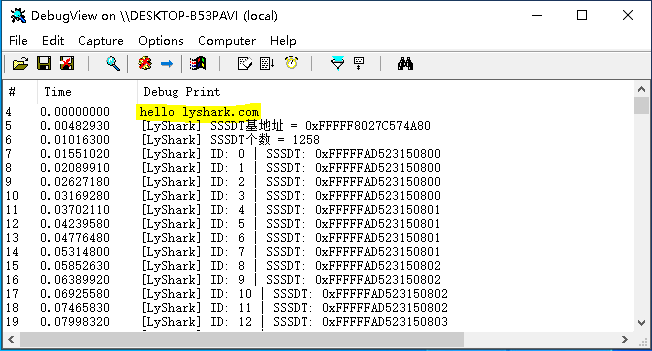
6.2 Windows驱动开发:内核枚举SSSDT表基址
在Windows内核中,SSSDT(System Service Shadow Descriptor Table)是SSDT(System Service Descriptor Table)的一种变种,其主要用途是提供Windows系统对系统服务调用的阴影拷贝。SSSDT表存储了系统调用的函数…...
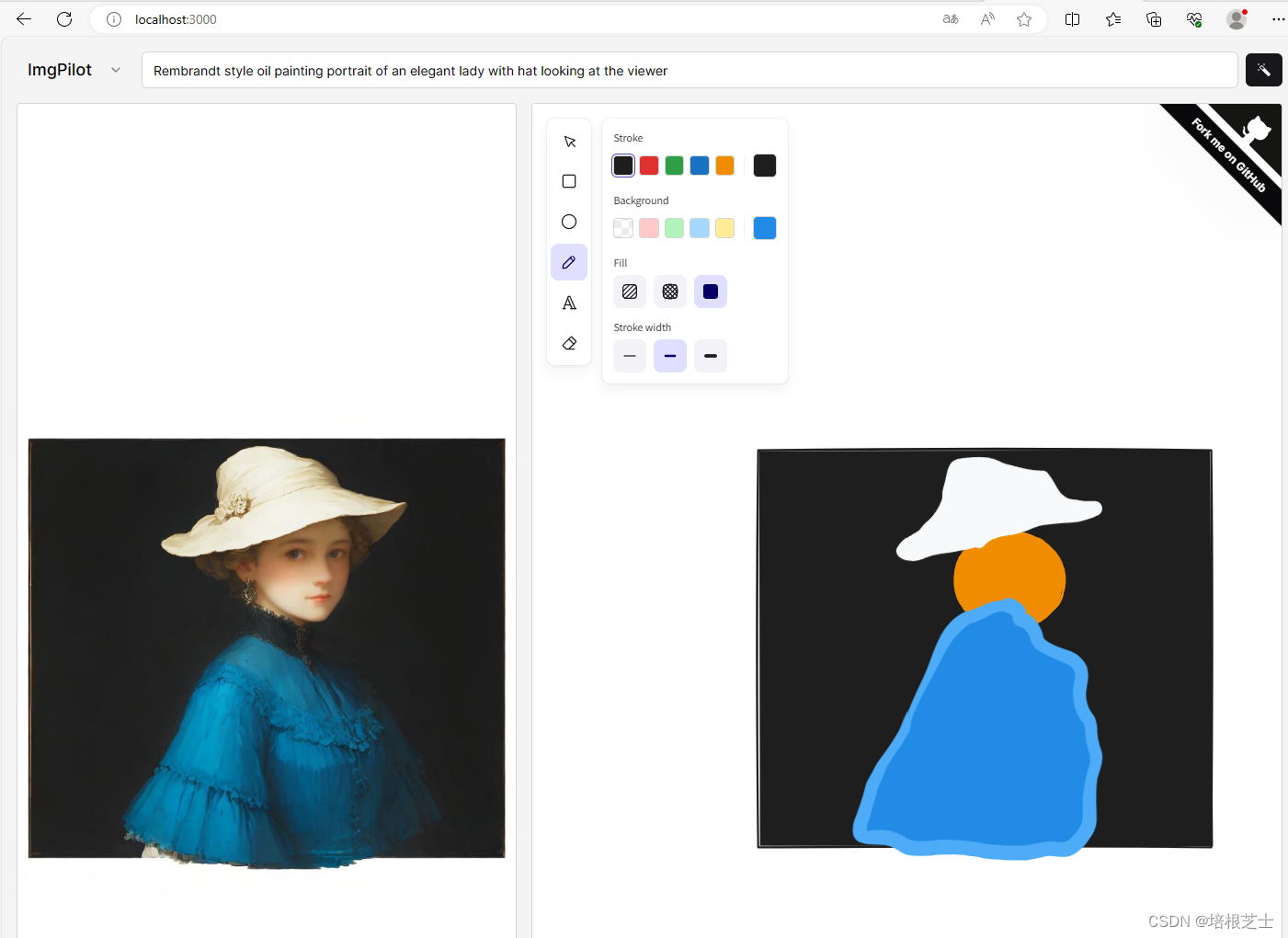
实时LCM的ImgPilot搭建部署
ImgPilot是具有实时潜在一致性模型(LCM)功能的图像试点 下载源码 GitHub - leptonai/imgpilot: Image pilot with the power of Real-Time Latent Consistency Modelhttps://github.com/leptonai/imgpilot安装前端web cd imgpilot npm install 安装…...

开源与闭源:大模型未来的发展之争
在当今数字化时代,开源与闭源软件一直是技术界争论的热点话题。随着人工智能技术的快速发展,特别是大模型(如GPT-4等)的广泛应用,这个辩论在大模型技术的背景下变得更加引人注目。本文将探讨开源与闭源的优劣势比较&am…...
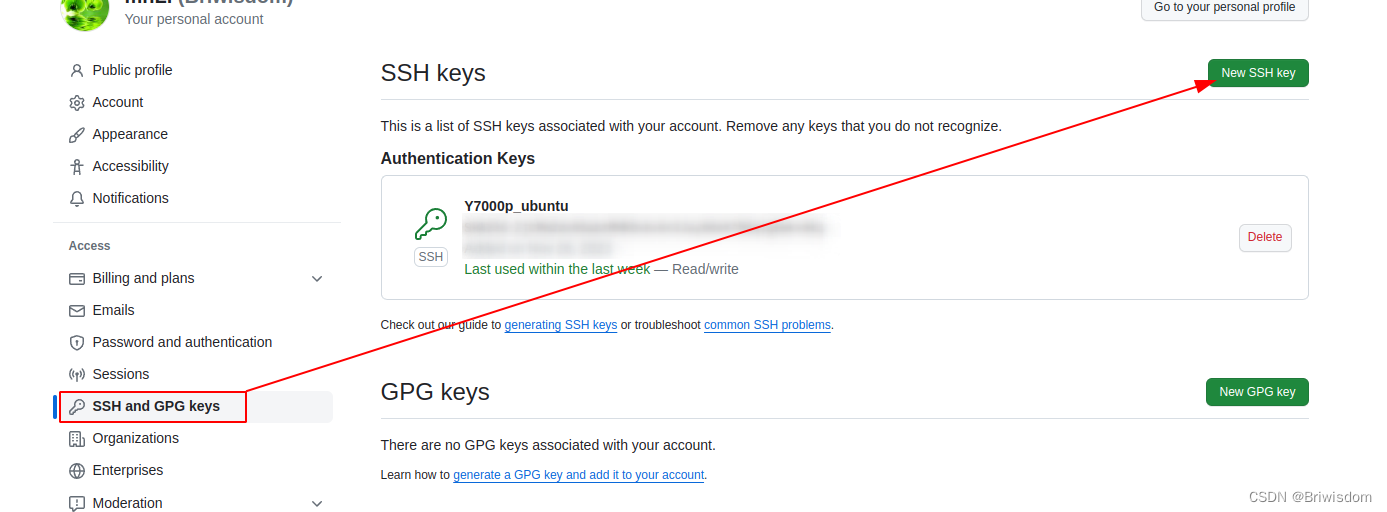
linux系统初始化本地git,创建ssh-key
step1, 在linux系统配置你的git信息 sudo apt install -y git//step1 git config --global user.name your_name // github官网注册的用户名 git config --global user.email your_email //gitub官网注册绑定的邮箱 git config --list //可以查看刚才你的配置内容…...

JDBC 操作 SQL Server 时如何传入列表参数
本文是作为将要对 PostgreSQL 的 in, any() 操作的一个铺垫,也是对先前用 JDBC 操作 SQL Server 的温习。以此记录一下用 JDBC 查询 SQL Server 时如何传递一个列表参数。比如想像一下查询语句 select * from users where id in (?) 我们是否能给这里的问题参数传递…...
[算法总结] - 蓄水池采样算法
问题描述 在长度为N的数组中,随机等概率选取K个元素,如何实现这个随机算法。 思路很简单,生成一个[0, N]的随机数index,然后返回index上的数值即可。 但是,如果输入是一个长度未知的数组比如stream,先遍历…...
【Dockerfile】将自己的项目构建成镜像部署运行
目录 1.Dockerfile 2.镜像结构 3.Dockerfile语法 4.构建Java项目 5.基于Java8构建项目 1.Dockerfile 常见的镜像在DockerHub就能找到,但是我们自己写的项目就必须自己构建镜像了。 而要自定义镜像,就必须先了解镜像的结构才行。 2.镜像结构 镜…...

flink和机器学习模型的常用组合方式
背景 flink是一个低延迟高吞吐的系统,每秒处理的数据量高达数百万,而机器模型一般比较笨重,虽然功能强大,但是qps一般都比较低,日常工作中,我们一般是如何把flink和机器学习模型组合起来一起使用呢? fli…...
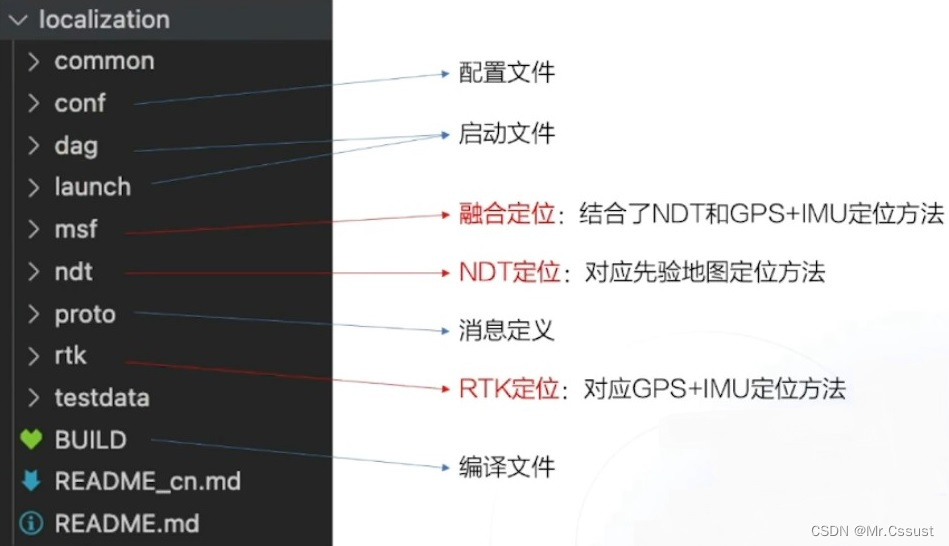
自动驾驶学习笔记(十二)——定位技术
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录 前言 卫星定位 RTK定位 IMU定位 GNSS定…...

【MySQL系列】PolarDB入门使用
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
第二节HarmonyOS DevEco Studio创建项目以及界面认识
一、创建项目 如果你是首次打开DevEco Studio,那么首先会进入欢迎页。 在欢迎页中单击Create Project,进入项目创建页面。 选择‘Application’,然后选择‘Empty Ability’,单击‘Next’进入工程配置页。 配置页中,详…...
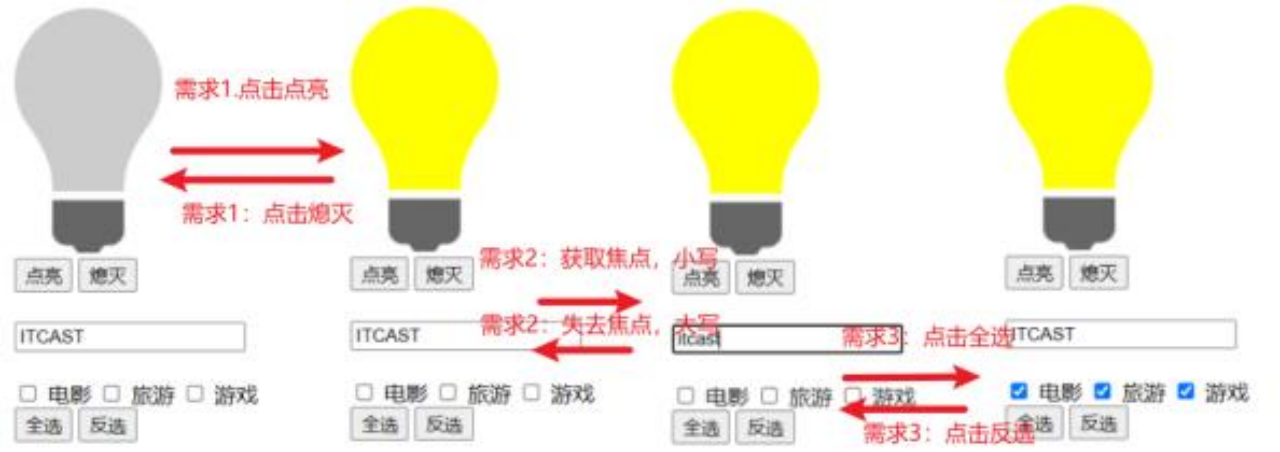
网页设计--第5次课后作业
1、快速学习JavaScript的基本知识第11-14章 JavaScript入门 - 绿叶学习网 2、使用所学的知识完成以下练习。 1)点击 “点亮”按钮 点亮灯泡,点击“熄灭”按钮 熄灭灯泡 2)输入框鼠标聚焦后,展示小写;鼠标离焦后…...

Spring Cache框架,实现了基于注解的缓存功能。
个人简介:Java领域新星创作者;阿里云技术博主、星级博主、专家博主;正在Java学习的路上摸爬滚打,记录学习的过程~ 个人主页:.29.的博客 学习社区:进去逛一逛~ Spring Cache框架 简介Spring Cache 环境准备S…...

Gemma-3-12B-IT WebUI性能实测:不同问题类型的响应时间对比
Gemma-3-12B-IT WebUI性能实测:不同问题类型的响应时间对比 1. 测试背景与目标 1.1 为什么关注响应时间? 在实际使用大语言模型WebUI时,响应时间是最直接影响用户体验的指标之一。想象一下,当你向AI助手提出问题时,…...

OpenClaw对接gemma-3-12b-it实战:本地部署与WebUI自动化任务指南
OpenClaw对接gemma-3-12b-it实战:本地部署与WebUI自动化任务指南 1. 为什么选择OpenClawgemma-3-12b-it组合 去年我在尝试自动化办公流程时,发现大多数RPA工具要么功能受限,要么需要将敏感数据上传到云端。直到遇到OpenClaw这个开源的本地化…...

Open-AutoGLM自动化测试:用自然语言编写移动应用测试用例
Open-AutoGLM自动化测试:用自然语言编写移动应用测试用例 1. 项目概述 Open-AutoGLM是由智谱AI开源的一款革命性手机端智能助理框架,专为自动化手机操作而设计。该项目基于AutoGLM架构构建,采用Apache-2.0开源协议,完全免费且支…...

新手前端开发入门:借助快马AI从零理解小恐龙游戏代码逻辑
今天想和大家分享一个特别适合前端新手的练手项目——用HTML、CSS和JavaScript实现一个简易的小恐龙游戏。这个项目结构清晰,能帮助我们快速理解前端三件套的协作方式。最近我在InsCode(快马)平台上尝试了这个项目,发现它的AI辅助功能对新手特别友好。 项…...

编程新手学编程,先学C语言还是C++?学姐告诉你答案
身为一名编程方面的新手,大家都会遭遇的一个疑问是:是要先去学习C语言,还是要先去学习C?有些同学会认为倘若我先着手学习C,之后再回过头来学习C语言,这样是不是会更为简便?毕竟,升级…...

04月06日AI每日参考:Gemma4颠覆参数论 阿里OpenAI频放新动作
今日概览今日AI圈迎来技术与商业双重爆发,谷歌Gemma 4以小参数模型打破行业"参数迷信",为端侧AI普及按下加速键。阿里、OpenAI等头部玩家同步放出新动作,国产大模型与芯片的组合也传来突破性消息,全行业的技术路线和市场…...

DeepSeek-OCR-2算力优化部署:支持多GPU并行解析提升吞吐量方案
DeepSeek-OCR-2算力优化部署:支持多GPU并行解析提升吞吐量方案 1. 为什么需要多GPU并行解析? 如果你用过单张显卡跑DeepSeek-OCR-2,可能会遇到这样的场景:公司财务部门一次性发来50张发票扫描件,行政部需要处理100页…...

【GD32F407】内部Flash高效读写策略与实战优化
1. GD32F407内部Flash特性解析 GD32F407作为国产MCU中的明星产品,其内部Flash设计颇具特色。第一次拿到芯片手册时,我发现它的存储架构比想象中复杂得多。最让我印象深刻的是前512KB空间的零等待特性——这意味着在此范围内的代码执行速度堪比RAM&#x…...

作品被篡改署名?三步维权指南
您好,我理解您遇到了作品被他人擅自修改并署名为“悟空”的情况,这确实是一件令人非常气愤和不快的事情。首先,请务必保持冷静。愤怒是正常的,但清晰的行动才能更好地维护您的权益。针对这种情况,您可以按照以下步骤来…...

告别打印乱码与错位:手把手教你配置SAP Smartforms的CNSAPWIN打印机格式
告别打印乱码与错位:手把手教你配置SAP Smartforms的CNSAPWIN打印机格式 在SAP系统的日常使用中,打印问题是最令人头疼却又无法回避的挑战之一。想象一下,当你精心设计的发票Smartforms报表终于完成,却在打印时发现内容被截断、错…...