在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
- 前言
- 立方体平台
- 加入 livox mid360 激光雷达
- 加入IMU模块
- 调整底盘大小 并设计调用接口
- 测试 Fast-Lio2
前言
livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。
但是其只发布雷达的数据,没有imu数据,实际的雷达是可以发布既有雷达也有imu的数据的
运行 FAST-LIO2 也需要雷达和惯导的数据
本篇博客在gazebo中搭建了一个有livox mid360 和惯导的平台,并成功运行了FAST-LIO2
立方体平台
先做一个最简单的立方体平台,用来放livox mid360 和惯导
编写一个xacro文件,如下
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="example"><!-- Base Footprint --><link name="base_footprint" /><!-- Base Link --><joint name="footprint" type="fixed" ><parent link="base_footprint" /><child link="link_platform" /><origin xyz="0 0 0.05" rpy="0 0 0" /></joint><link name="link_platform" ><visual><geometry><box size="0.5 0.5 0.1" /></geometry></visual><collision><geometry><box size="0.5 0.5 0.1" /></geometry></collision><inertial><origin xyz="0 0 0"/><mass value="0.01"/><inertia ixx="0.001" ixy="0.0" ixz="0.0"iyy="0.001" iyz="0.0" izz="0.001" /></inertial></link></robot>
写一个launch文件来启动它,加载到gazebo和rivz中
<?xml version="1.0" ?>
<launch><arg name="paused" default="false"/><arg name="use_sim_time" default="true"/><arg name="gui" default="true"/><arg name="headless" default="false"/><arg name="debug" default="false"/><arg name="verbose" default="false"/><!-- Start gazebo and load the world --><include file="$(find gazebo_ros)/launch/empty_world.launch" ><arg name="paused" value="$(arg paused)"/><arg name="use_sim_time" value="$(arg use_sim_time)"/><arg name="gui" value="$(arg gui)"/><arg name="headless" value="$(arg headless)"/><arg name="debug" value="$(arg debug)"/><arg name="verbose" value="$(arg verbose)"/></include>
<!-- Spawn the platform --><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find livox_laser_simulation)/urdf/mid360_IMU_platform.xacro' " /><node pkg="gazebo_ros" type="spawn_model" name="spawn_model" args="-urdf -param /robot_description -model example"/><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"><param name="publish_frequency" type="double" value="30.0" /></node><!-- RViz --><arg name="rviz" default="true"/><node if="$(arg rviz)" pkg="rviz" type="rviz" name="$(anon rviz)" respawn="false" output="screen" args="-d $(find livox_laser_simulation)/rviz/mid360_IMU_platform.rviz" /></launch>
启动
roslaunch livox_laser_simulation mid360_IMU_platform.launch
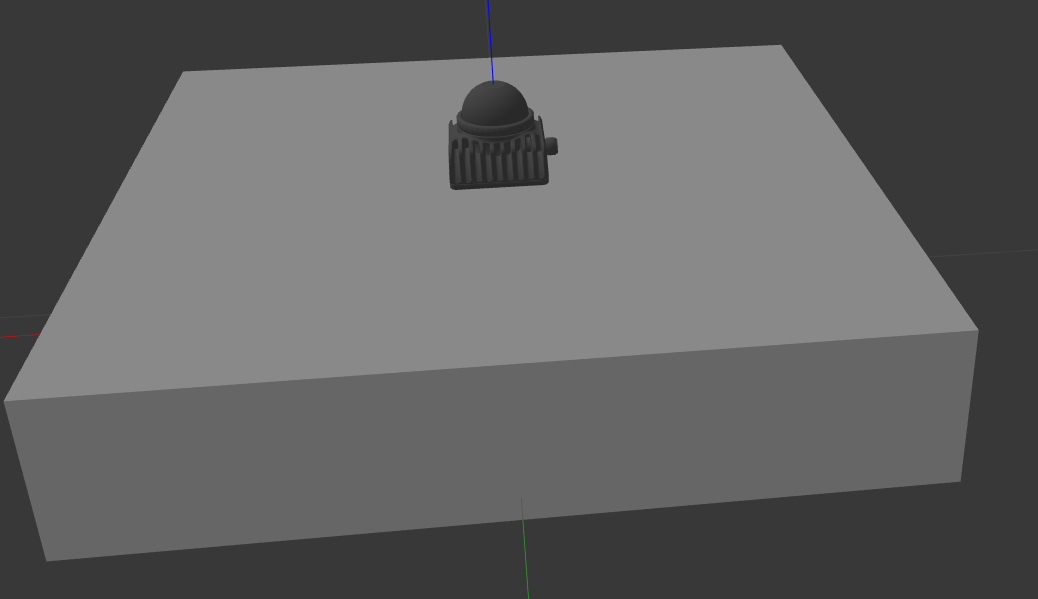
gazebo 和rviz 中会出现下面的立方体,具体的尺寸和颜色可以最后再根据雷达和惯导再调整

加入 livox mid360 激光雷达
下一步向平台上加入 livox mid360 激光雷达, 放在平台的中心。
向 livox_laser_simulation/urdf/mid360_IMU_platform.xacro 文件中加入下面代码
<joint name="lidar_platform" type="fixed" ><parent link="link_platform" /><child link="livox_base" /><origin xyz="0 0 0.08" rpy="0 0 0" /></joint><xacro:include filename="$(find livox_laser_simulation)/urdf/livox_mid360.xacro"/><xacro:Livox_Mid360 name="livox"/>
再次启动launch文件即可,看到平台中央多了livox mid360 雷达
确认雷达输出点云正常,可向周围加入几个物体测试

点云正常
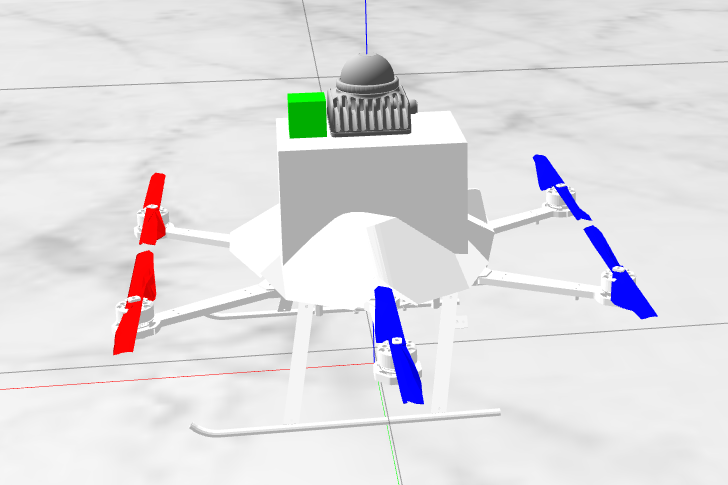
加入IMU模块
向平台中加入IMU模块,放在雷达的前方一点
向 livox_laser_simulation/urdf/mid360_IMU_platform.xacro 文件中加入下面代码
<!--imu --><link name="imu_base_link"><visual><origin xyz="0 0 0" rpy="0 0 0" /><geometry ><box size="0.03 0.03 0.03" /></geometry></visual><collision><origin xyz="0 0 0" rpy="0 0 0" /><geometry ><box size="0.03 0.03 0.03" /></geometry></collision> <inertial><mass value="0.001"/><inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001"/></inertial> </link><gazebo reference="imu_base_link"><material>Gazebo/Green</material><turnGravityOff>true</turnGravityOff></gazebo><joint name="imu_platform_joint" type="fixed"><parent link="link_platform"/><child link="imu_base_link"/><origin xyz="0.05 0 0.065" rpy="0 0 0" /><axis xyz="0 0 1" /></joint><gazebo reference="imu_base_link"><gravity>true</gravity><sensor name="imu_sensor" type="imu"><always_on>true</always_on><update_rate>200</update_rate><visualize>true</visualize><topic>/livox/imu</topic><plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"><topicName>/livox/imu</topicName> <bodyName>imu_base_link</bodyName><updateRateHZ>200.0</updateRateHZ> <gaussianNoise>0.00329</gaussianNoise> <xyzOffset>0 0 0</xyzOffset> <rpyOffset>0 0 0</rpyOffset><frameName>imu_base_link</frameName> </plugin><pose>0 0 0 0 0 0</pose></sensor></gazebo>
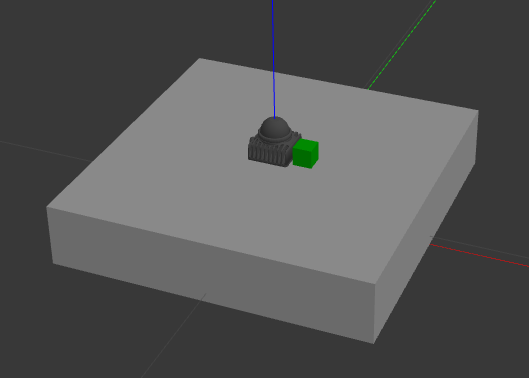
再次启动launch文件即可,看到平台中 的livox mid360 雷达 前多了一个绿色的小方块,它即为刚建立惯导模型
通过rostopic 查看 惯导数据是否正常
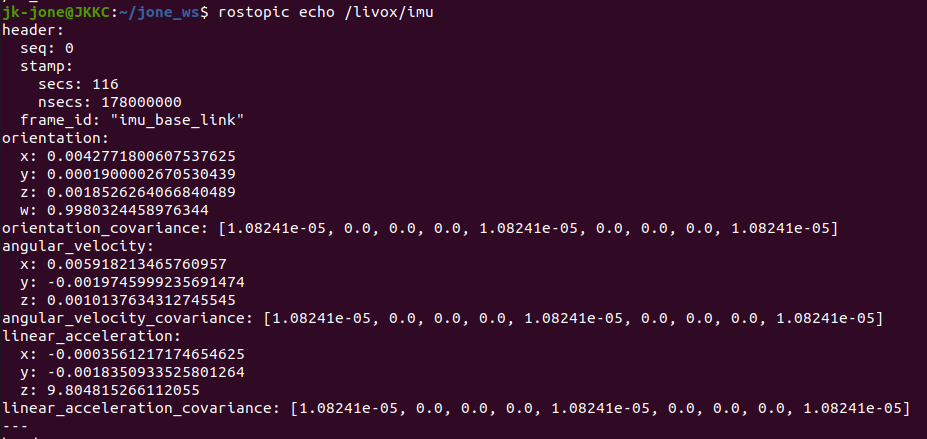
数据正常
调整底盘大小 并设计调用接口
下一步需要调整底盘平台的大小,能够放下雷达和惯导即可
将底盘尺寸改为如下
<box size="0.15 0.1 0.1" />
回来平台的前方挂个双目也不错
带有雷达和惯导的平台搭建完了
但是这个平台无法运动,也就完成不了建图,如果运行需要将平台挂载到小车或者无人机上。
所以需要对这个平台设计好接口,方便其它移动平台挂载。
修改 livox_laser_simulation/urdf/mid360_IMU_platform.xacro 这个文件
最后的文件如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="example"><!-- Base Footprint --><!-- <link name="base_footprint" /> --><xacro:macro name="LivoxMid360_IMU_Plantform" params="name:=mid360_imu_plantform parent_link_name:=base_link x:=0.0 y:=0.0 z:=0.05 r:=0.0 p:=0.0 yaw:=0.0"><joint name="${name}_joint" type="fixed" ><parent link="${parent_link_name}" /><child link="link_platform" /><origin xyz="${x} ${y} ${z}" rpy="${r} ${p} ${yaw}" /></joint><!-- link_platform --><link name="link_platform" ><visual><geometry><box size="0.15 0.1 0.1" /></geometry></visual><collision><geometry><box size="0.15 0.1 0.1" /></geometry></collision><inertial><origin xyz="0 0 0"/><mass value="0.001"/><inertia ixx="0.001" ixy="0.0" ixz="0.0"iyy="0.001" iyz="0.0" izz="0.001" /></inertial></link><gazebo reference="link_platform"><turnGravityOff>false</turnGravityOff></gazebo><joint name="lidar_platform_joint" type="fixed" ><parent link="link_platform" /><child link="livox_base" /><origin xyz="0 0 0.08" rpy="0 0 0" /></joint><!--lidar --><xacro:include filename="$(find livox_laser_simulation)/urdf/livox_mid360.xacro"/><xacro:Livox_Mid360 name="livox"/><!--imu --><link name="imu_base_link"><visual><origin xyz="0 0 0" rpy="0 0 0" /><geometry ><box size="0.03 0.03 0.03" /></geometry></visual><collision><origin xyz="0 0 0" rpy="0 0 0" /><geometry ><box size="0.03 0.03 0.03" /></geometry></collision> <inertial><mass value="0.001"/><inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001"/></inertial></link><gazebo reference="imu_base_link"><material>Gazebo/Green</material><turnGravityOff>false</turnGravityOff></gazebo><joint name="imu_platform_joint" type="fixed"><parent link="link_platform"/><child link="imu_base_link"/><origin xyz="0.05 0 0.065" rpy="0 0 0" /><axis xyz="0 0 1" /></joint><gazebo reference="imu_base_link"><gravity>true</gravity><sensor name="imu_sensor" type="imu"><always_on>true</always_on><update_rate>200</update_rate><visualize>true</visualize><topic>/livox/imu</topic><plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"><topicName>/livox/imu</topicName> <bodyName>imu_base_link</bodyName><updateRateHZ>200.0</updateRateHZ> <gaussianNoise>0.00329</gaussianNoise> <xyzOffset>0 0 0</xyzOffset> <rpyOffset>0 0 0</rpyOffset><frameName>imu_base_link</frameName> </plugin><pose>0 0 0 0 0 0</pose></sensor></gazebo></xacro:macro></robot>
将其挂载到飞机上,代码如下:的几款雷达进行了仿真测试。
<xacro:include filename="$(find livox_laser_simulation)/urdf/mid360_IMU_platform.xacro"/><xacro:LivoxMid360_IMU_Plantform name ="mid360_imu_plantform" parent_link_name="${namespace}/base_link" x="0" y="0" z="0.08" r="0" p="0" yaw="0" />
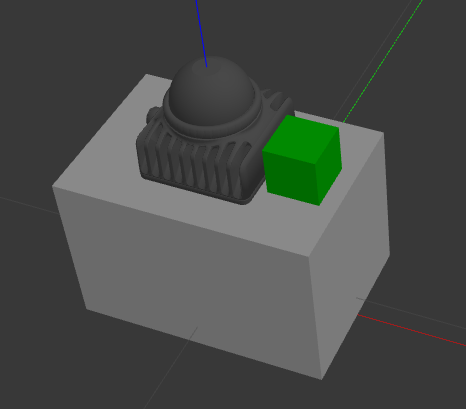
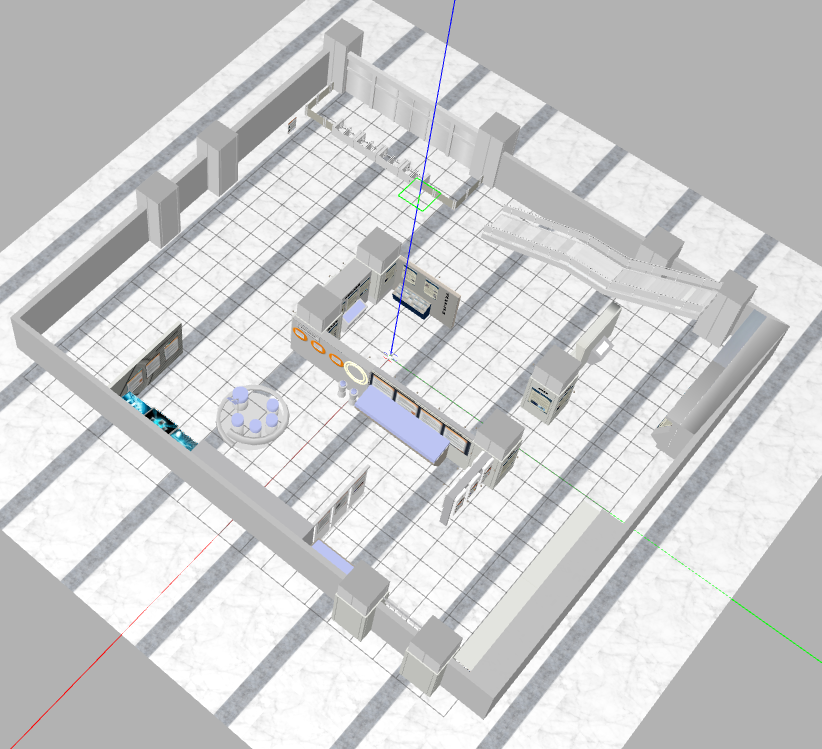
最终效果如下:
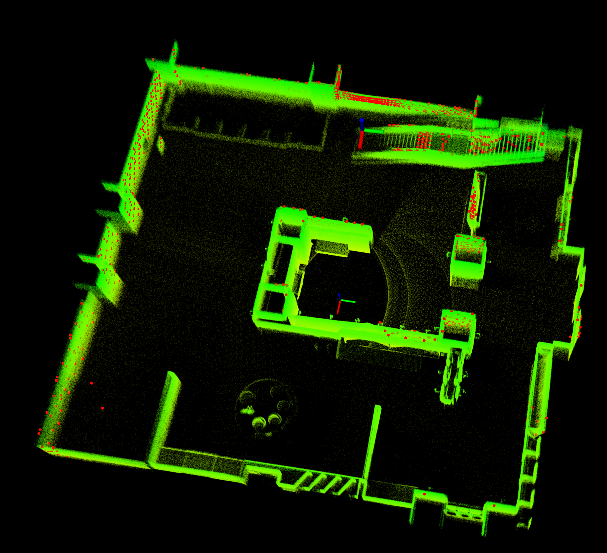
测试 Fast-Lio2
用这个平台跑Fast-Lio2 还需要有一步,就是修改雷达的仿真程序,使其发送Livox的Custcom格式的点云,这个方法会放到其它博客中
调通后,用其跑Fast-Lio2 效果如下:
相关文章:
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 惯导仿真平台测试 FAST-LIO2 前言立方体平台加入 livox mid360 激光雷达加入IMU模块调整底盘大小 并设计调用接口测试 Fast-Lio2 前言 livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。 但是其只发布雷达的数…...

SpringMVC文件下载
<!--解决找不到“jquery-3.4.1.min.js”(静态资源访问)的问题 --> <mvc:default-servlet-handler/>方式1:如果去掉download就是查看图片 <a href"${pageContext.request.contextPath}/uploadfiles/${requestScope.filena…...

前端项目打包放到springboot项目时,访问不带index.html
当您的前端项目被打包并放到 Spring Boot 项目中时,如果想要通过访问不带 index.html 的路径来直接进入前端页面,您可以使用以下方法: 1,在 Spring Boot 项目中添加一个路由规则,将所有对特定路径的请求重定向到前端页…...
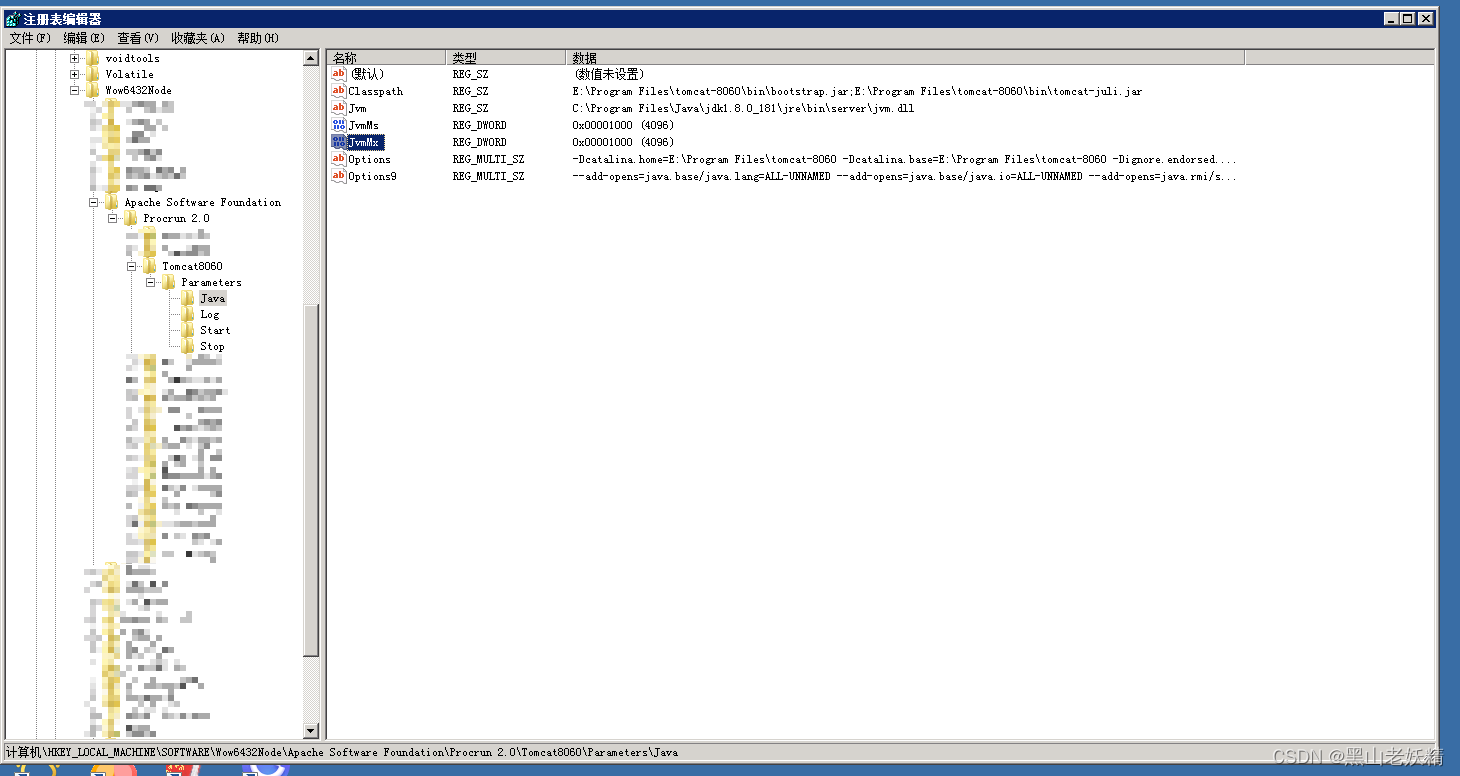
Tomcat注册为服务后,如何配置Tomcat内存大小
前提条件:tomcat已经注册为服务。 1.winR,输入regedit打开注册表 2.找到Tomcat注册表路径: HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\Apache Software Foundation\Procrun 2.0\Tomcat80603.找到jvm内存配置路径: HKEY_LOCAL_MACHINE\SOFTW…...
)
C语言入门实战教程——嵌入式必备教程(2023年版最全最新整理)
一、初识C语言 C语言诞生于美国的贝尔实验室,由丹尼斯里奇(Dennis MacAlistair Ritchie)以肯尼斯蓝汤普森(Kenneth Lane Thompson)设计的B语言为基础发展而来,C语言是一个功能简化的版本,它使C…...
Chatbot开发三剑客:LLAMA、LangChain和Python
聊天机器人(Chatbot)开发是一项充满挑战的复杂任务,需要综合运用多种技术和工具。在这一领域中,LLAMA、LangChain和Python的联合形成了一个强大的组合,为Chatbot的设计和实现提供了卓越支持。 首先,LLAMA是…...

【Spring之AOP底层源码解析】
文章目录 一、动态代理1.1、ProxyFactory1.2、Advice的分类1.3、Advisor的理解 二、创建代理对象的方式2.1、ProxyFactoryBean2.2、BeanNameAutoProxyCreator2.3、DefaultAdvisorAutoProxyCreator 三、Spring AOP的理解3.1、AOP中的概念3.2、Advice在Spring AOP中对应API3.3、T…...

【UCAS自然语言处理作业二】训练FFN, RNN, Attention机制的语言模型,并计算测试集上的PPL
文章目录 前言前馈神经网络数据组织Dataset网络结构训练超参设置 RNN数据组织&Dataset网络结构训练超参设置 注意力网络数据组织&Dataset网络结构Attention部分完整模型 训练部分超参设置 结果与分析训练集Loss测试集PPL 前言 本次实验主要针对前馈神经网络࿰…...
RabbitMQ消息模型之Sample
Hello World Hello World是官网给出的第一个模型,使用的交换机类型是直连direct,也是默认的交换机类型。 在上图的模型中,有以下概念: P:生产者,也就是要发送消息的程序C:消费者:消…...

安全技术与防火墙
目录 安全技术 防火墙 按保护范围划分: 按实现方式划分: 按网络协议划分. 数据包 四表五链 规则链 默认包括5种规则链 规则表 默认包括4个规则表 四表 查询 格式: 规则 面试题 NFS常见故障解决方法 安全技术 入侵检测系统 (Intrusion Detection Sy…...
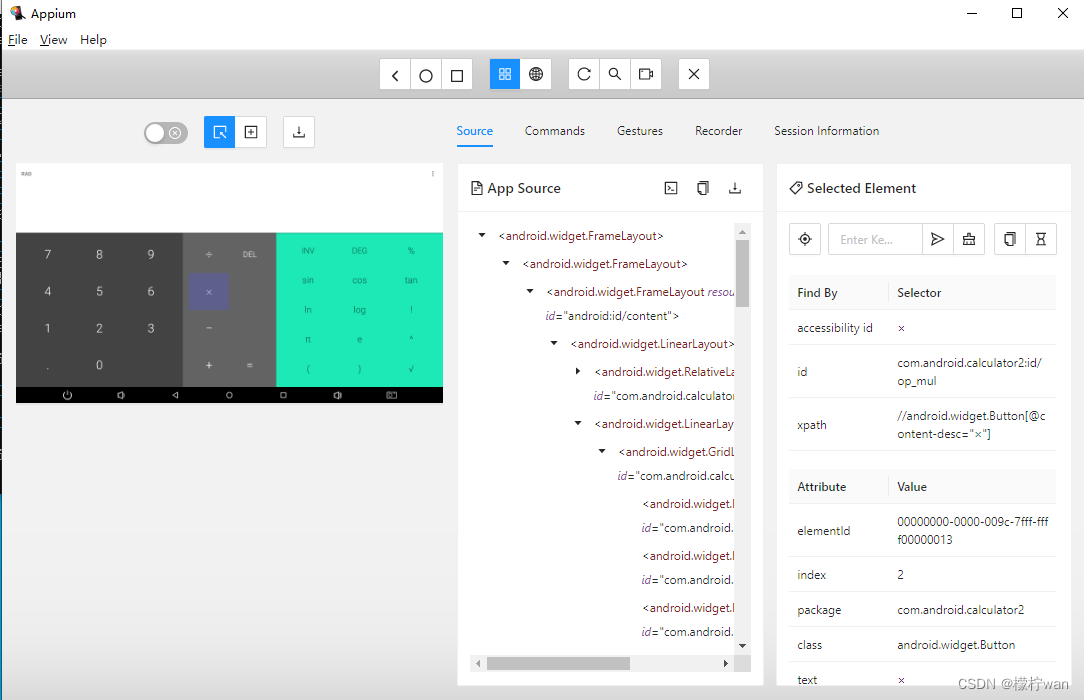
Windows系统搭建Appium 2 和 Appium Inspector 环境
前言 自 2022 年 1 月 1 日起,Appium 核心团队不再维护 Appium 1.x。官方支持的平台驱动程序的所有最新版本均不兼容 Appium 1.x,需要 Appium 2 才能运行。 Appium 2是一个自动化移动应用程序的开源工具,它带来了以下重要改进: …...

计算机应用基础_错题集_OutLook操作题_操作系统应用题_电子表格---网络教育统考工作笔记005
6、(说明:考生单击窗口下方的“打开[Outlook]应用程序”启动Outlook) 按以下要求保存草稿。 收件人:test_xiao_ming@163.com...
2023-11-26 LeetCode每日一题(统计子串中的唯一字符)
2023-11-26每日一题 一、题目编号 828. 统计子串中的唯一字符二、题目链接 点击跳转到题目位置 三、题目描述 我们定义了一个函数 countUniqueChars(s) 来统计字符串 s 中的唯一字符,并返回唯一字符的个数。 例如:s “LEETCODE” ,则其…...

HTML新手入门笔记整理:特殊符号
音标符 音标符 字符 Construct 输出结果 ̀、 a a à ́′ a a án ˆ a a â ̃~ a a ã ̀̀、 O O Ò ́́′ O O Ó ˆ O O Ô ̃~ O O Õ 字符 显示结果 描述 实体名称 实体编号 空格 <…...
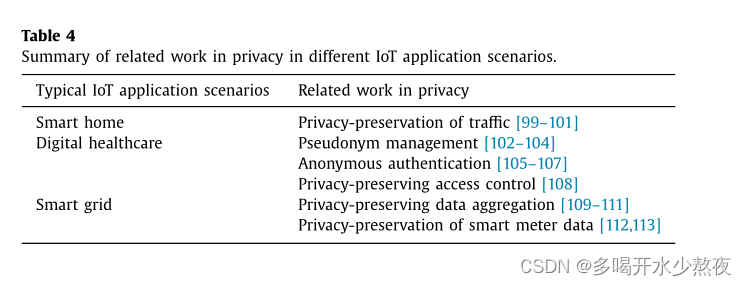
物联网中基于信任的安全性调查研究:挑战与问题
A survey study on trust-based security in Internet of Things: Challenges and issues 文章目录 a b s t r a c t1. Introduction2. Related work3. IoT security from the one-stop dimension3.1. Output data related security3.1.1. Confidentiality3.1.2. Authenticity …...

tex2D使用学习
1. 背景: 项目中使用到了纹理进行插值的加速,因此记录一些自己在学习tex2D的一些过程 2. 代码: #include "cuda_runtime.h" #include "device_launch_parameters.h" #include <assert.h> #include <stdio.h>…...

[iOS开发]UITableView的性能优化
一些基础的优化 (一)CPU 1. 用轻量级对象 比如用不到事件处理的地方,可以考虑使用 CALayer 取代 UIView CALayer * imageLayer [CALayer layer]; imageLayer.bounds CGRectMake(0,0,200,100); imageLayer.position CGPointMake(200,200…...
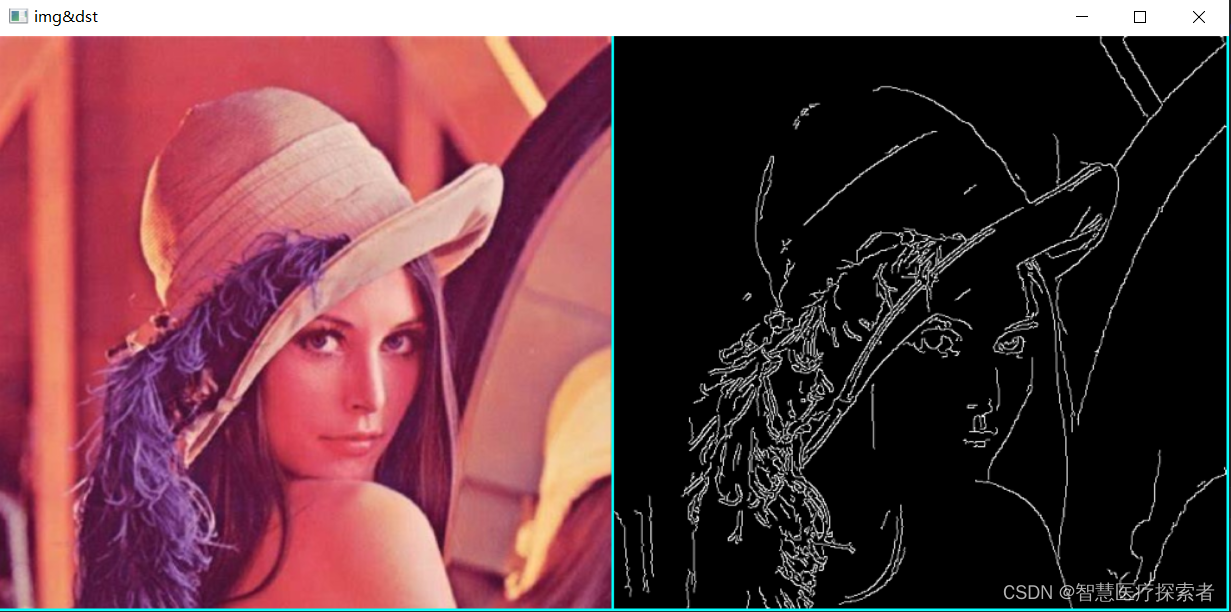
使用opencv实现图像滤波
1 图像滤波介绍 滤波是信号和图像处理中的基本任务之一,其旨在有选择地提取图像的某些特征,可以用于在给定应用程序的上下文中传达重要信息,例如,去除图像中的噪声、提取所需的视觉特征、图像重采样等。 1.1 图像滤波理论 图像…...
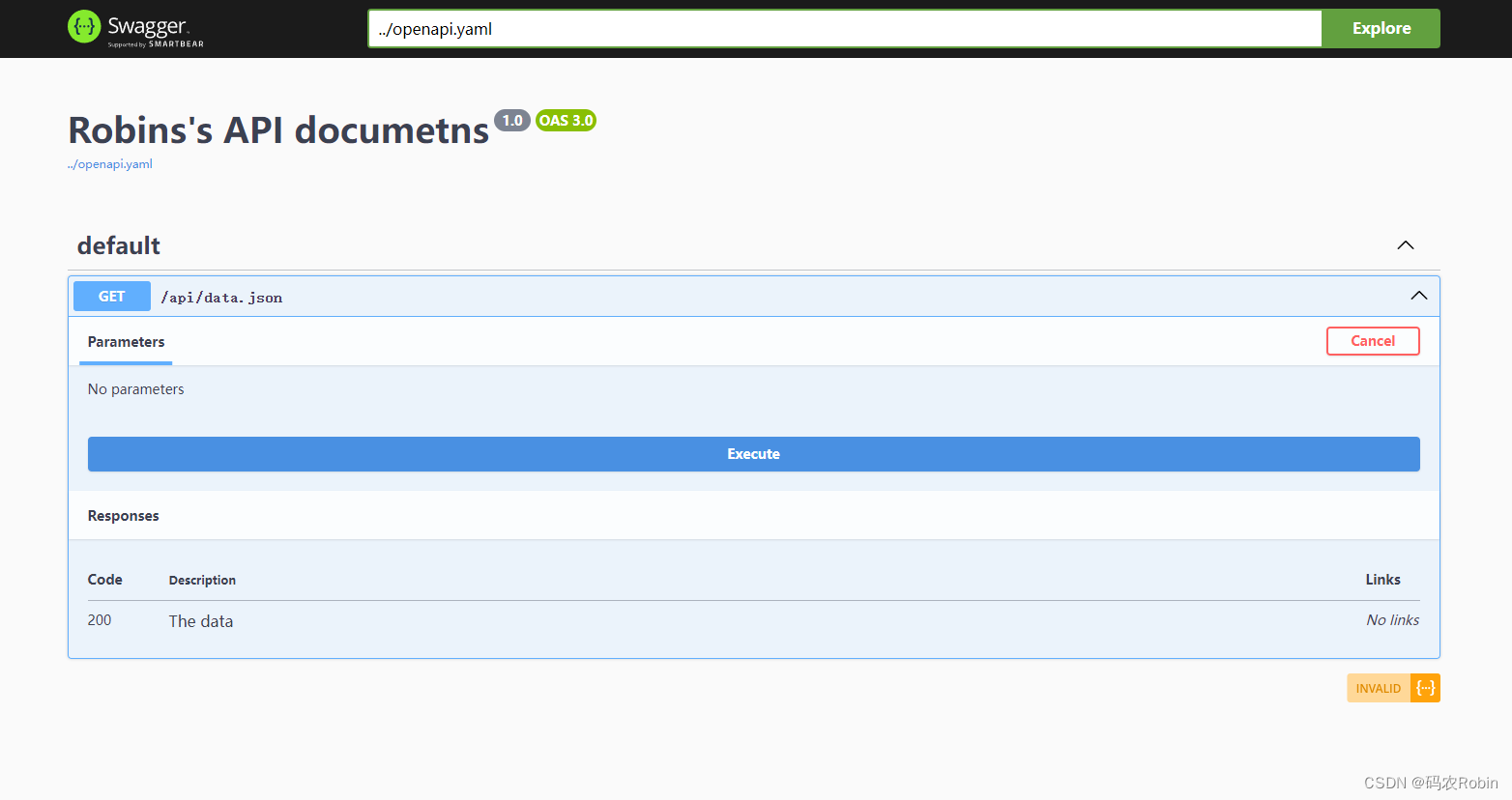
Swagger在php和java项目中的应用
Swagger在php和java项目中的应用 Swagger简介Swagger在java项目中的应用步骤常用注解 Swagger在php项目中的应用 Swagger简介 Swagger 是一个规范和完整的框架,用于生成、描述、调用和可视化 RESTful 风格的 Web 服务。 总体目标是使客户端和文件系统作为服务器以…...
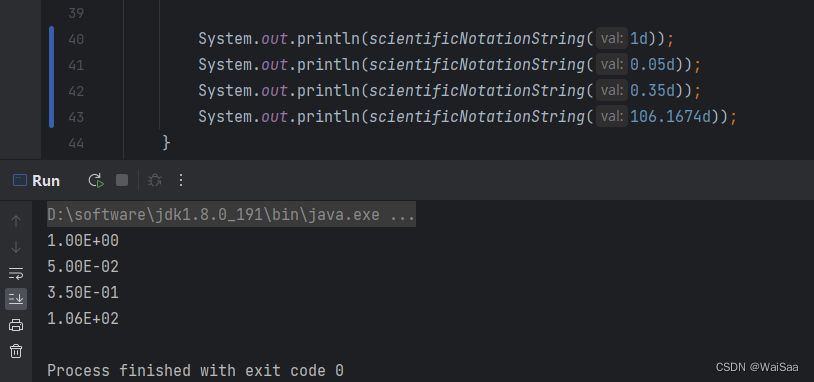
java科学计数法表示数值
Background 大多数计算器及计算机程序用科学记数法显示非常大和非常小的结果;但很多时候,我们需要做一个统一,要么全部以科学计数法输出,要么就全部显示为普通计数。注意:这里对大于等于1的数据做了特殊处理࿰…...
)
解锁Midjourney V6复古风生产力:3步精准控制颗粒度、褪色曲线与时代错位感(附12组实测Prompt参数表)
更多请点击: https://codechina.net 第一章:Midjourney V6复古美学的底层逻辑重构 Midjourney V6 并非简单迭代,而是对“视觉时间性”的一次系统性重编码——其复古美学并非依赖滤镜叠加或风格迁移模型,而是将胶片颗粒、暗房化学…...

终极FileBrowser上手指南:10分钟掌握Web文件管理神器
终极FileBrowser上手指南:10分钟掌握Web文件管理神器 【免费下载链接】filebrowser 📂 Web File Browser 项目地址: https://gitcode.com/gh_mirrors/fi/filebrowser FileBrowser是一个功能强大的Web文件管理器,让你能够通过浏览器界面…...
)
从电影运镜到游戏镜头:手把手教你用Cinemachine实现高级镜头语言(含Dutch Angle等实战配置)
从电影运镜到游戏镜头:手把手教你用Cinemachine实现高级镜头语言(含Dutch Angle等实战配置) 在游戏开发中,镜头语言是叙事和情感表达的重要工具。就像电影导演通过精心设计的镜头来引导观众情绪一样,游戏开发者也可以…...

渗透测试小白上手指南:系统化故障排查能力迁移手册
1. 别被“渗透测试”四个字吓住:它本质是系统化的故障排查能力很多人第一次听说“渗透测试”,脑子里立刻浮现出黑客电影里飞速滚动的代码、黑底绿字的终端、几秒钟攻破银行防火墙的炫酷场面。结果一搜学习资料,满屏都是“Kali Linux”“Metas…...

PPT怎么转PDF?一键快捷操作与全方位转换方法测评
在日常工作中,我们经常需要将PowerPoint演示文稿转换成PDF格式。无论是为了保证演示文件的兼容性、方便分享给他人,还是用于打印和存档,PPT转PDF都是一项必不可少的技能。本文将为你深入讲解PPT转PDF的多种方法,包括快捷键操作、软…...
告别龟速下载!trackerslist项目让你的BT下载速度飙升300%的终极指南
告别龟速下载!trackerslist项目让你的BT下载速度飙升300%的终极指南 【免费下载链接】trackerslist Updated list of public BitTorrent trackers 项目地址: https://gitcode.com/GitHub_Trending/tr/trackerslist 你是否曾经面对BT下载时进度条几乎不动而感…...

29.新生活轨道
七月中旬,北京的夏天进入最炙热的阶段。阳光白晃晃地炙烤着大地,空气滚烫,连风吹在脸上都带着一股干燥的灼烧感。行道树上的知了叫得声嘶力竭,仿佛要用尽最后一丝力气,对抗这无休止的炎热。陈远的生活,也像…...

网易2026年Q1财报:游戏增长背后,AI、跨端与全球化面临哪些挑战?
网易发布2026年Q1财报5月21日,网易发布2026年第一季度财报。大体上,网易呈现出基本面企稳、公司效率提升以释放利润的态势。财报显示,网易Q1净收入306亿元,同比增长6.1%,Non - GAAP归母净利润为107亿元。游戏及相关增值…...

基于STM32H750XBH6开发板调试LwIP裸机程序
目录 1 前言 2 正点原子STM32H750XBH6阿波罗开发板介绍 3 配置和调试 3.1 CubeMX配置 3.2 代码修改 1 前言 LwIP 是物联网 / 嵌入式领域使用最广的开源 精简版TCP/IP 协议栈,STM32、ESP32、国产 MCU 全都用它,对于嵌入式 / 物联网初学者来说,亲手调试 LwIP 裸机程序(无操作…...

安克创新推 Soundcore Liberty 5 Pro 系列耳机:AI 降噪+智能记录,续航与功能的新平衡
Soundcore Liberty 5 Pro 系列:AI 音频芯片带来降噪新体验安克创新推出 Soundcore Liberty Pro 真无线耳机的新版本——Liberty 5 Pro 及 Liberty 5 Pro Max。Liberty 5 Pro 是首款搭载 Thus AI 音频芯片的耳机,该芯片能增强降噪能力,让用户在…...