三轴加速度计LIS2DW12开发(2)----基于中断信号获取加速度数据
三轴加速度计LIS2DW12开发.2--轮基于中断信号获取加速度数据
- 概述
- 视频教学
- 样品申请
- 生成STM32CUBEMX
- 串口配置
- IIC配置
- CS和SA0设置
- INT1设置
- 串口重定向
- 参考程序
- 初始换管脚
- 获取ID
- 复位操作
- BDU设置
- 开启INT1中断
- 设置传感器的量程
- 配置过滤器链
- 配置电源模式
- 设置输出数据速率
- 中断判断加速度数据状态
- 演示
概述
本文将介绍实时获取和处理加速度数据。程序的核心流程包括初始化硬件接口、配置加速度计的参数,以及通过轮询检查中断信号来不断读取加速度数据。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
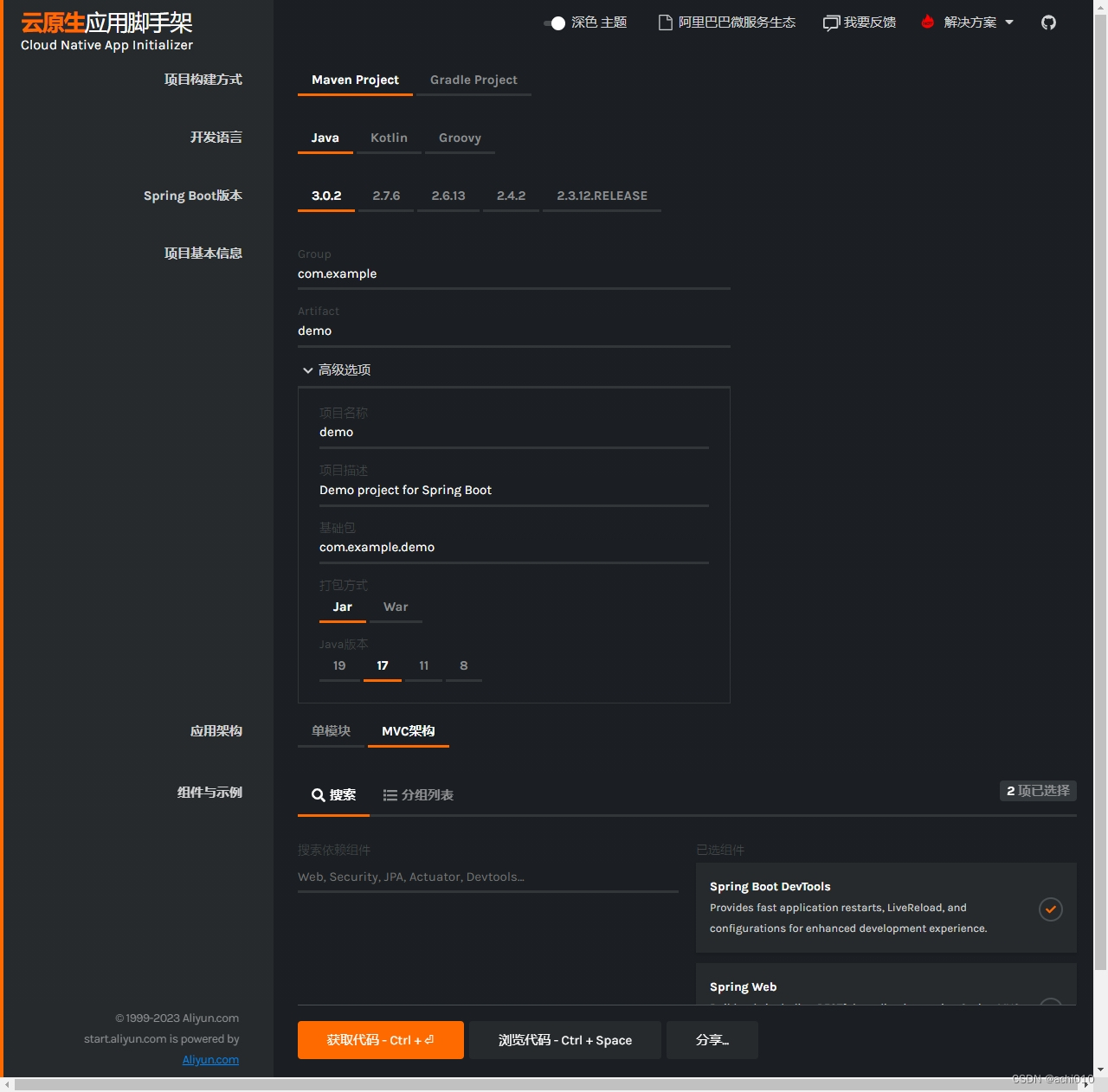
生成STM32CUBEMX
用STM32CUBEMX生成例程,这里使用MCU为STM32WB55RG。
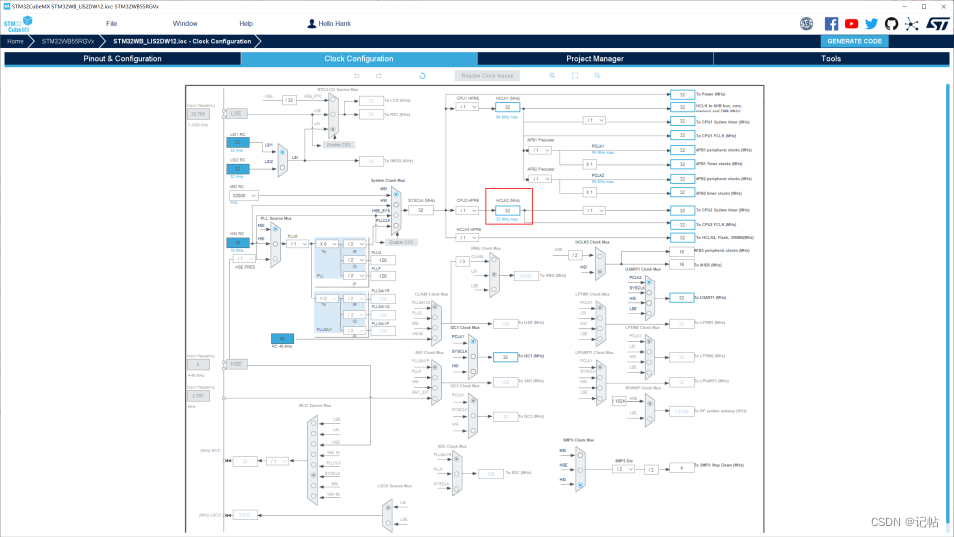
配置时钟树,配置时钟为32M。
串口配置
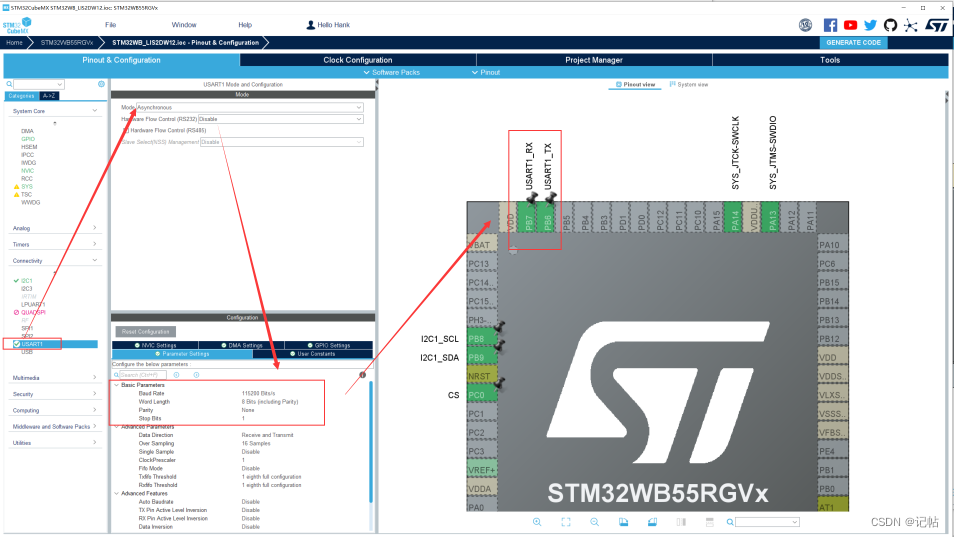
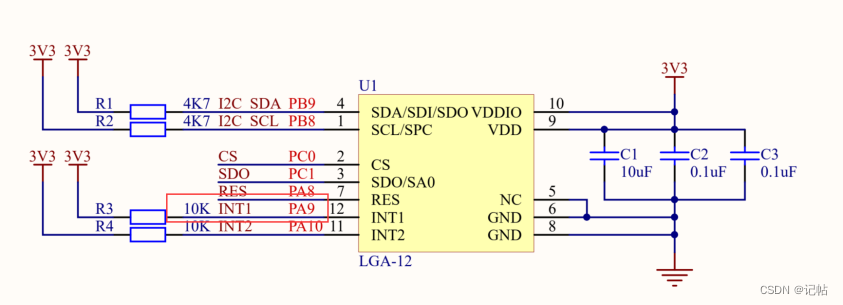
查看原理图,PB6和PB7设置为开发板的串口。
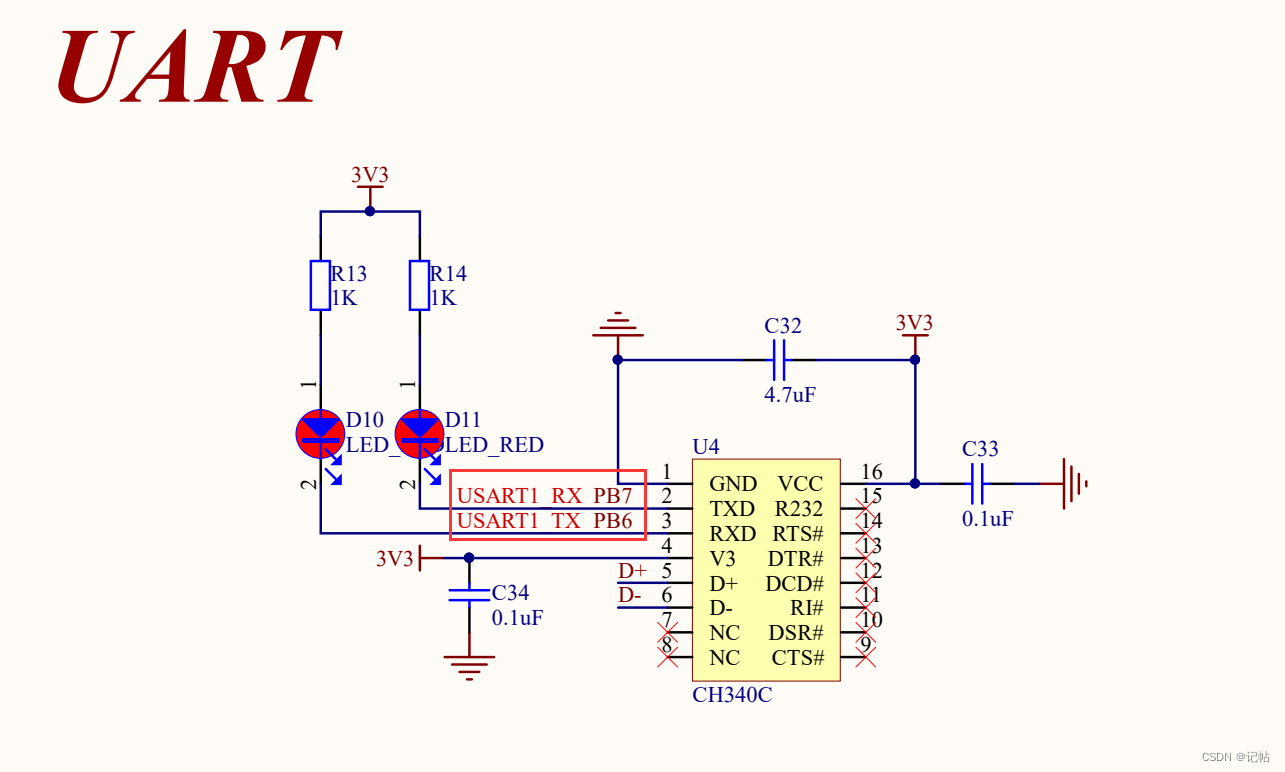
配置串口。
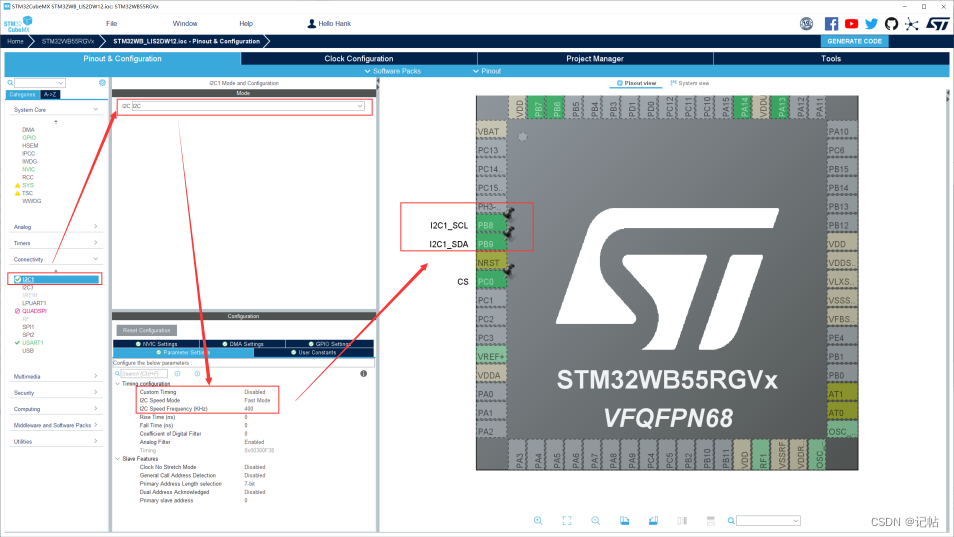
IIC配置
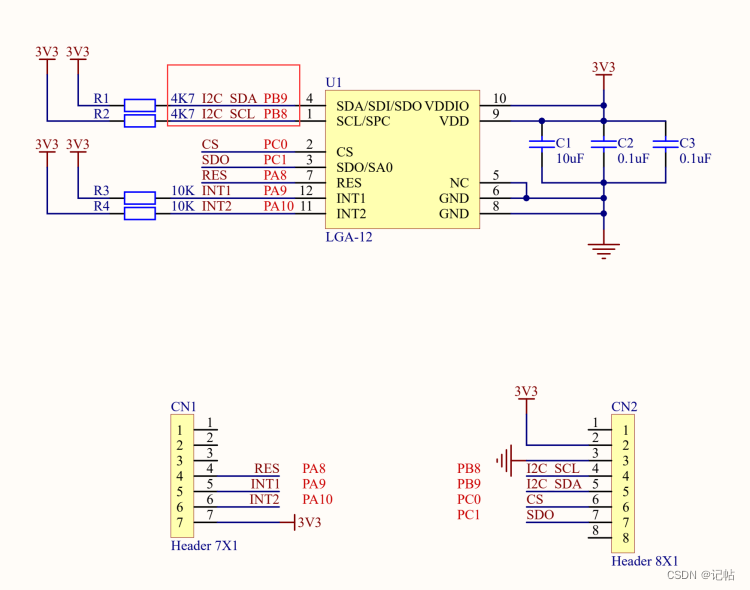
配置IIC为快速模式,速度为400k。
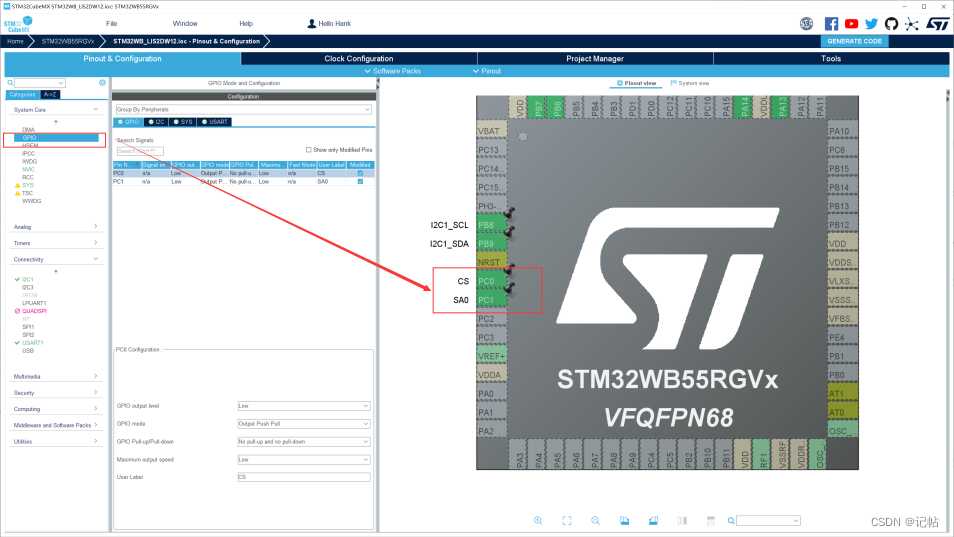
CS和SA0设置
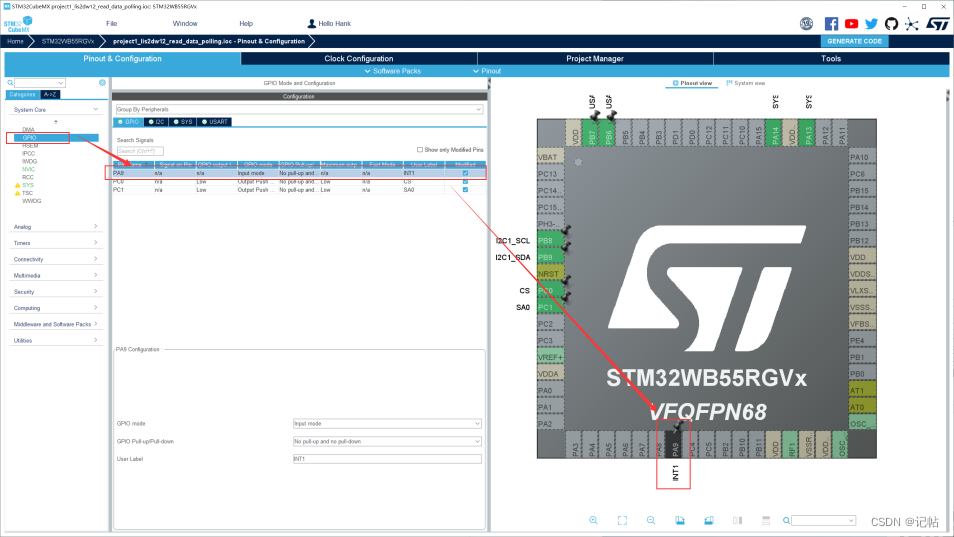
INT1设置
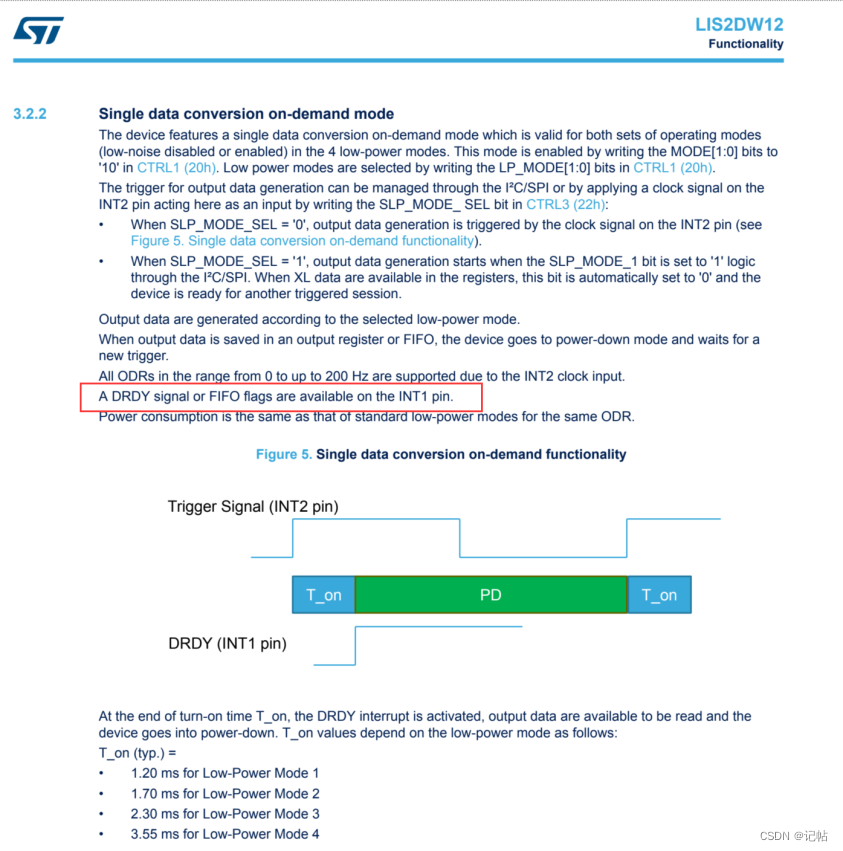
数据准备完毕可以通过INT1获取中断信号。
INT1接入PA9,需要配置PA9为输入模式。
配置如下所示。
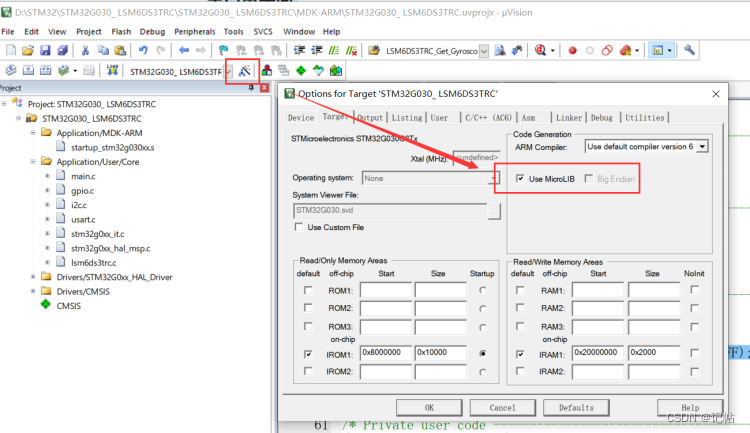
串口重定向
打开魔术棒,勾选MicroLIB
在main.c中,添加头文件,若不添加会出现 identifier “FILE” is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */函数声明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);return ch;
}
/* USER CODE END PFP */
参考程序
https://github.com/STMicroelectronics/lis2dw12-pid
初始换管脚
由于需要向LIS2DW12_I2C_ADD_H写入以及为IIC模式。
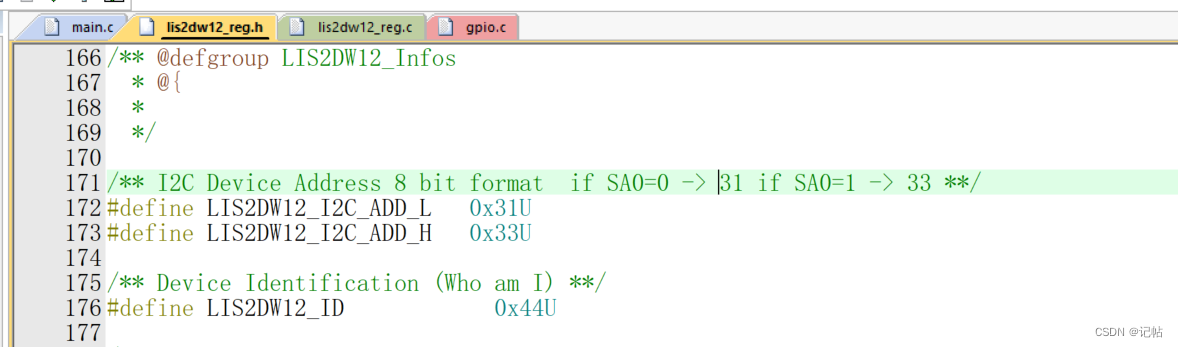
所以使能CS为高电平,配置为IIC模式。
配置SA0为高电平。
stmdev_ctx_t dev_ctx;lis2dw12_reg_t int_route;dev_ctx.write_reg = platform_write;dev_ctx.read_reg = platform_read;dev_ctx.handle = &SENSOR_BUS;HAL_GPIO_WritePin(GPIOC, CS_Pin, GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOC, SA0_Pin, GPIO_PIN_SET);
获取ID
我们可以向WHO_AM_I (0Fh)获取固定值,判断是否为0x44。
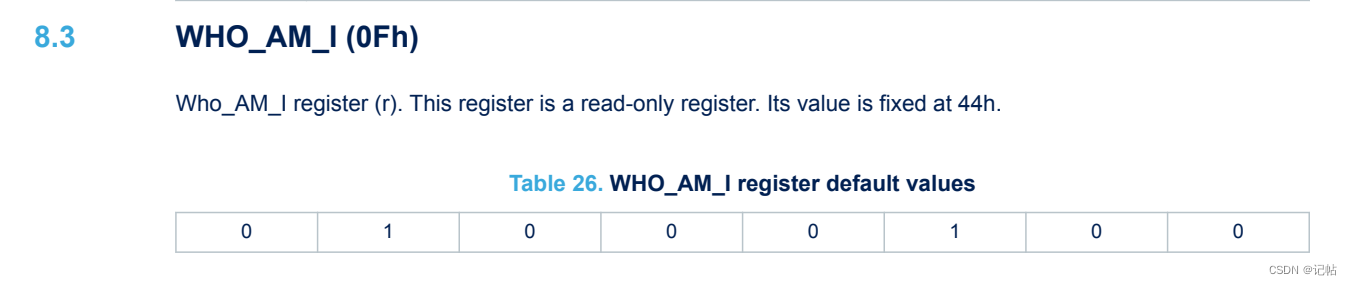
lis2dw12_device_id_get为获取函数。
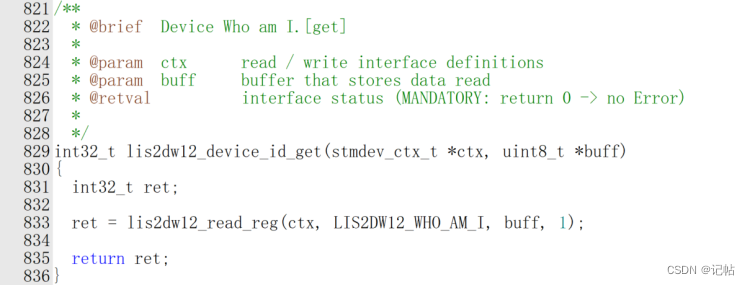
对应的获取ID驱动程序,如下所示。
/* Wait sensor boot time */platform_delay(BOOT_TIME);/* Check device ID */lis2dw12_device_id_get(&dev_ctx, &whoamI);printf("LIS2DW12_ID=0x%x,whoamI=0x%x",LIS2DW12_ID,whoamI);if (whoamI != LIS2DW12_ID)while (1) {/* manage here device not found */}
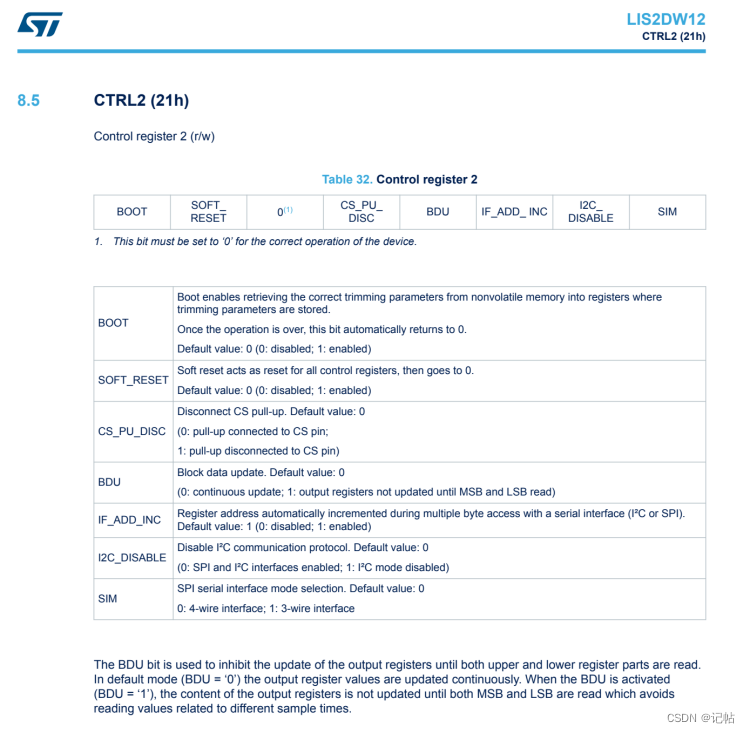
复位操作
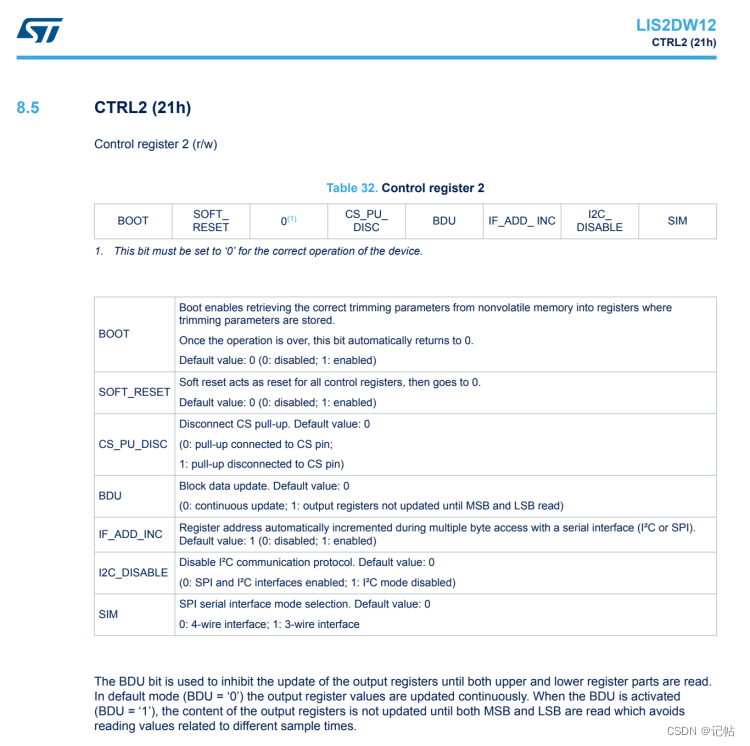
可以向CTRL2 (21h)的SOFT_RESET寄存器写入1进行复位。
lis2dw12_reset_set为重置函数。
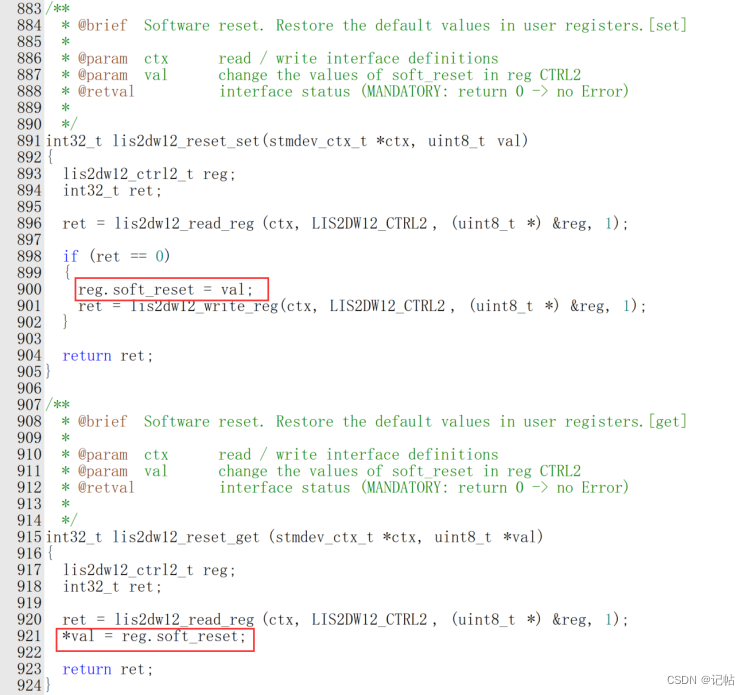
对应的驱动程序,如下所示。
/* Restore default configuration */lis2dw12_reset_set(&dev_ctx, PROPERTY_ENABLE);do {lis2dw12_reset_get(&dev_ctx, &rst);} while (rst);
BDU设置
在很多传感器中,数据通常被存储在输出寄存器中,这些寄存器分为两部分:MSB和LSB。这两部分共同表示一个完整的数据值。例如,在一个加速度计中,MSB和LSB可能共同表示一个加速度的测量值。
连续更新模式(BDU = ‘0’):在默认模式下,输出寄存器的值会持续不断地被更新。这意味着在你读取MSB和LSB的时候,寄存器中的数据可能会因为新的测量数据而更新。这可能导致一个问题:当你读取MSB时,如果寄存器更新了,接下来读取的LSB可能就是新的测量值的一部分,而不是与MSB相对应的值。这样,你得到的就是一个“拼凑”的数据,它可能无法准确代表任何实际的测量时刻。
块数据更新(BDU)模式(BDU = ‘1’):当激活BDU功能时,输出寄存器中的内容不会在读取MSB和LSB之间更新。这就意味着一旦开始读取数据(无论是先读MSB还是LSB),寄存器中的那一组数据就被“锁定”,直到两部分都被读取完毕。这样可以确保你读取的MSB和LSB是同一测量时刻的数据,避免了读取到代表不同采样时刻的数据。
简而言之,BDU位的作用是确保在读取数据时,输出寄存器的内容保持稳定,从而避免读取到拼凑或错误的数据。这对于需要高精度和稳定性的应用尤为重要。
可以向CTRL2 (21h)的BDU寄存器写入1进行开启。
对应的驱动程序,如下所示。
/* Enable Block Data Update */lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
开启INT1中断
设置中断通知方式。LIS2DW12_INT_LATCHED 表明使用锁存型中断,意味着中断信号会保持激活状态,直到被读取或者清除。
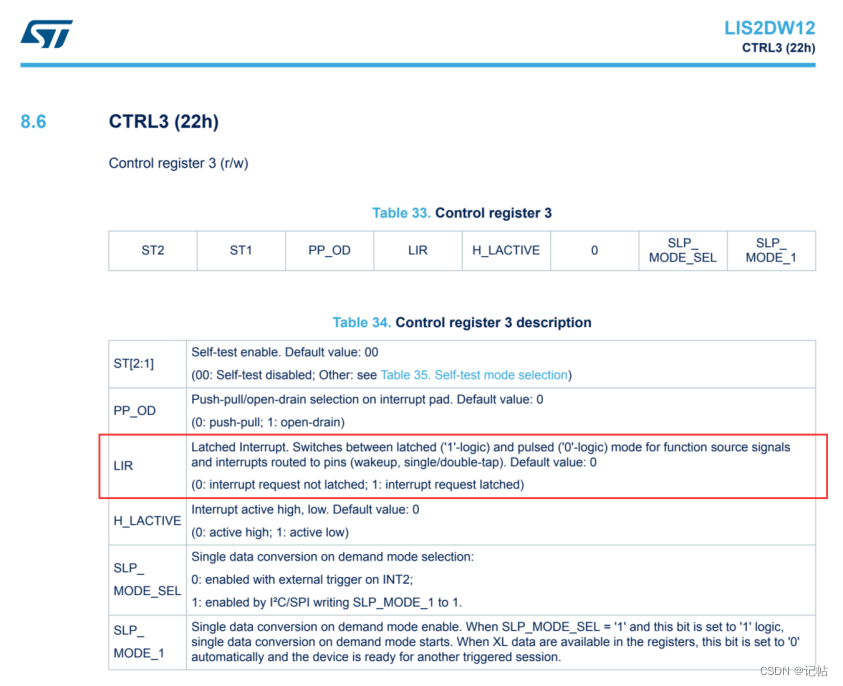
lis2dw12_int_notification_set(&dev_ctx, LIS2DW12_INT_LATCHED);
设置中断引脚的极性。LIS2DW12_ACTIVE_LOW 指示中断引脚在激活时是低电平。
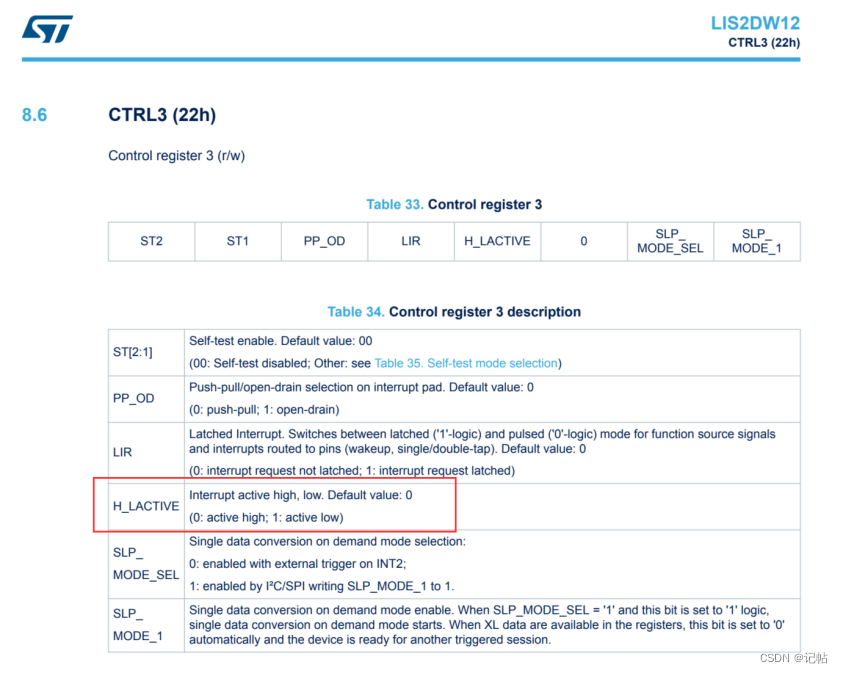
lis2dw12_pin_polarity_set(&dev_ctx, LIS2DW12_ACTIVE_LOW);
读取 INT1 引脚的当前中断路由配置到 ctrl4_int1_pad 结构体中,(CTRL4_INT1_PAD_CTRL, 地址为 0x23h)这个寄存器用于配置加速度计的中断1引脚(INT1)的行为。
INT1_6D: 当设置为1时,6D定位识别的中断会被路由到INT1引脚。
INT1_SINGLE_TAP: 单击识别中断的启用/禁用。
INT1_WU: 唤醒识别中断的启用/禁用。
INT1_FF: 自由落体识别中断的启用/禁用。
INT1_TAP: 双击识别中断的启用/禁用。
INT1_DIFF5: FIFO满识别中断的启用/禁用。
INT1_FTH: FIFO阈值中断的启用/禁用。
INT1_DRDY: 数据就绪(Data-Ready)中断的启用/禁用。

需要将INT1_DRDY置为1。
然后再将数据写入到(CTRL4_INT1_PAD_CTRL, 地址为 0x23h)这个寄存器钟。
lis2dw12_pin_int1_route_get(&dev_ctx, &ctrl4_int1_pad);ctrl4_int1_pad.int1_drdy = PROPERTY_ENABLE;lis2dw12_pin_int1_route_set(&dev_ctx, &ctrl4_int1_pad);
设置传感器的量程
FS[1:0] - 全量程选择:这两个位用于设置传感器的量程。量程决定了传感器可以测量的最大加速度值。例如,量程可以设置为±2g、±4g、±8g或±16g。这允许用户根据应用的特定需求调整传感器的灵敏度。
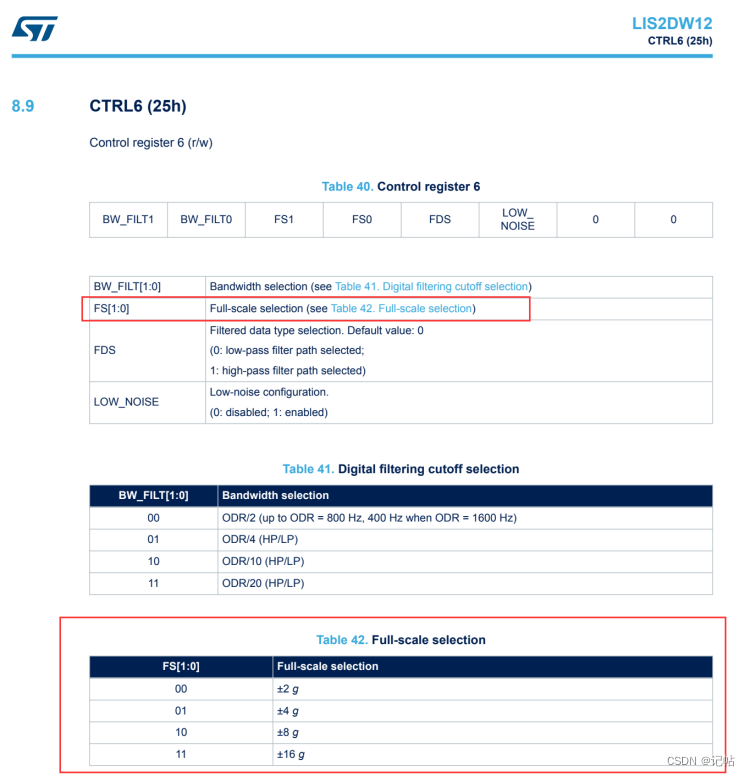
对应的驱动程序,如下所示。
/* Set full scale */lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
配置过滤器链
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);:设置加速度计输出的过滤器路径。这里选择了输出上的低通滤波器(LPF),用于去除高频噪声。
lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_10);设置过滤器的带宽。LIS2DW12_ODR_DIV_10 表明带宽设置为输出数据率(ODR)的十分之一。
配置电源模式
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_CONT_LOW_PWR_12bit);配置电源模式。这里设置为连续低功耗模式,且以 12 位分辨率运行。
设置输出数据速率
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_SET_SW_TRIG);设置加速度计的数据输出速率。LIS2DW12_XL_SET_SW_TRIG 可能表示使用软件触发来设置数据输出速率。
/* Wait sensor boot time */platform_delay(BOOT_TIME);/* Check device ID */lis2dw12_device_id_get(&dev_ctx, &whoamI);if (whoamI != LIS2DW12_ID)while (1) {/* manage here device not found */}/* Restore default configuration */lis2dw12_reset_set(&dev_ctx, PROPERTY_ENABLE);do {lis2dw12_reset_get(&dev_ctx, &rst);} while (rst);/* Enable Block Data Update */lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);lis2dw12_int_notification_set(&dev_ctx, LIS2DW12_INT_LATCHED);lis2dw12_pin_polarity_set(&dev_ctx, LIS2DW12_ACTIVE_LOW);lis2dw12_pin_int1_route_get(&dev_ctx, &ctrl4_int1_pad);ctrl4_int1_pad.int1_drdy = PROPERTY_ENABLE;lis2dw12_pin_int1_route_set(&dev_ctx, &ctrl4_int1_pad);/* Set full scale */lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);/* Configure filtering chain accelerometer */lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_10);/* Configure power mode and Output Data Rate */lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_CONT_LOW_PWR_12bit);lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_SET_SW_TRIG);中断判断加速度数据状态
通过判断INT1管脚来判断数据是否准备完毕。
如果电平为低电平说明加速度数据已经准备完毕。
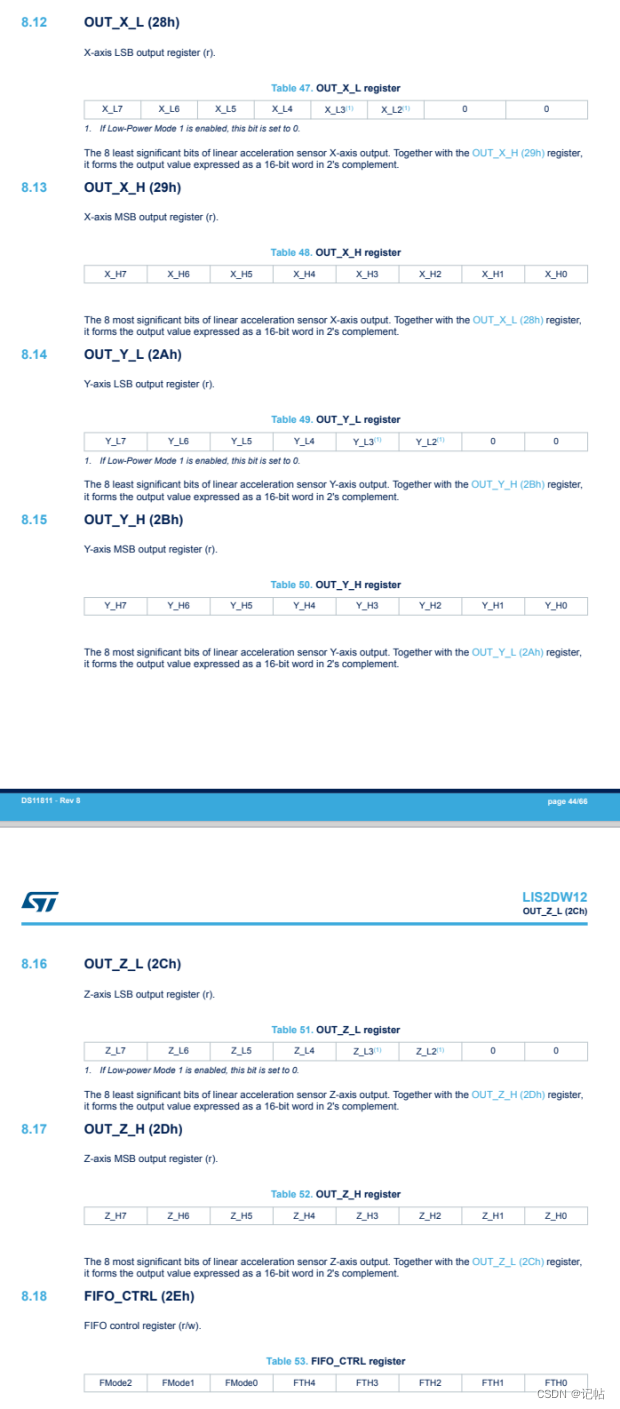
数据在28h-2Dh中。
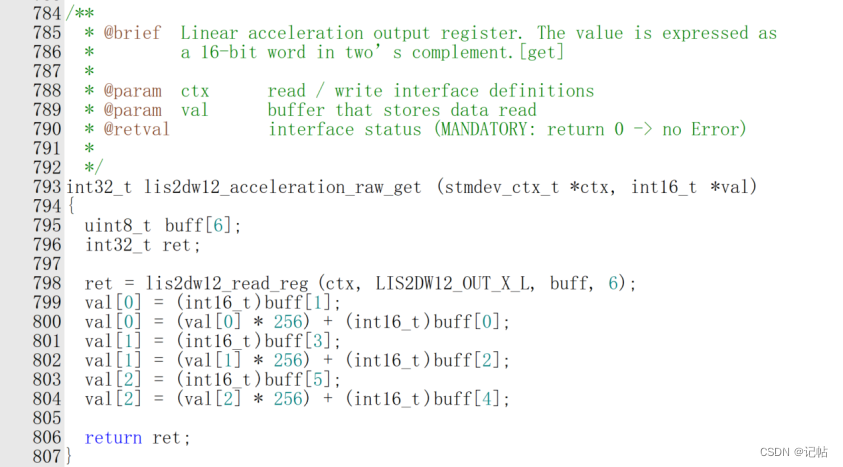
加速度数据首先以原始格式(通常是整数)读取,然后需要转换为更有意义的单位,如毫重力(mg)。这里的转换函数 lis2dw12_from_fs2_to_mg() 根据加速度计的量程(这里假设为±2g)将原始数据转换为毫重力单位。
acceleration_mg[0] = lis2dw12_from_fs2_to_mg(data_raw_acceleration[0]); 等三行代码分别转换 X、Y、Z 轴的加速度数据。

● LIS2DW12 加速度计通常会有一个固定的位分辨率,比如 16 位(即输出值是一个 16 位的整数)。这意味着加速度计可以输出的不同值的总数是 2^16=65536。这些值均匀地分布在 -2g 到 +2g 的范围内。
● 因此,这个范围(4g 或者 4000 mg)被分成了 65536 个步长。
● 每个步长的大小是 4000 mg/65536≈0.061 mg/LSB
所以,函数中的乘法 ((float_t)lsb) * 0.061f 是将原始的整数值转换为以毫重力(mg)为单位的加速度值。这个转换对于将加速度计的原始读数转换为实际的物理测量值是必需的。
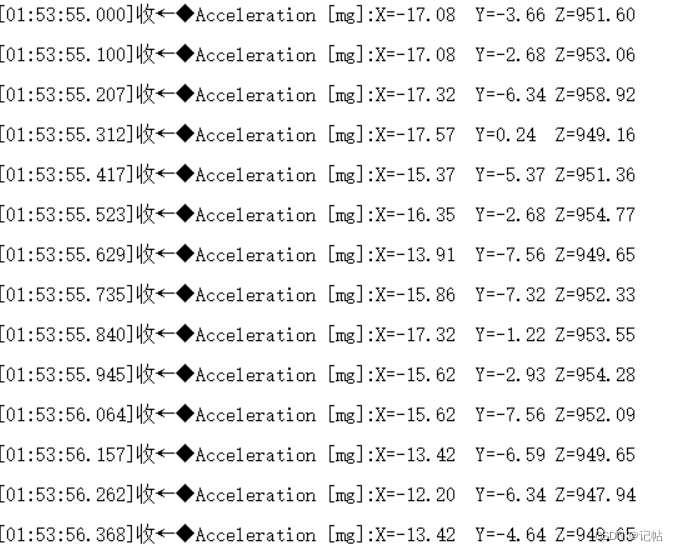
/* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* polling on DRDY signal */if (GPIO_PIN_RESET == HAL_GPIO_ReadPin(INT1_GPIO_Port, INT1_Pin)) {/* Read acceleration data */memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);acceleration_mg[0] = lis2dw12_from_fs2_lp1_to_mg(data_raw_acceleration[0]);acceleration_mg[1] = lis2dw12_from_fs2_lp1_to_mg(data_raw_acceleration[1]);acceleration_mg[2] = lis2dw12_from_fs2_lp1_to_mg(data_raw_acceleration[2]); lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_SET_SW_TRIG);printf("Acceleration [mg]:X=%4.2f\tY=%4.2f\tZ=%4.2f\r\n",acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);} /* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
演示
相关文章:
三轴加速度计LIS2DW12开发(2)----基于中断信号获取加速度数据
三轴加速度计LIS2DW12开发.2--轮基于中断信号获取加速度数据 概述视频教学样品申请生成STM32CUBEMX串口配置IIC配置CS和SA0设置INT1设置串口重定向参考程序初始换管脚获取ID复位操作BDU设置开启INT1中断设置传感器的量程配置过滤器链配置电源模式设置输出数据速率中断判断加速…...
Shell循环:whileuntil
一、特点:循环次数[一定]是固定的 二、while语句结构 while 条件测试 do 循环体 done 当条件测试成立(条件测试为真),执行循环体 演示: 需求:每秒显示一个数字,一…...
Redis 安装部署
文章目录 1、前言2、安装部署2.1、单机模式2.1.1、通过 yum 安装(不推荐,版本老旧)2.1.1、通过源码编译安装(推荐) 2.2、主从模式2.3、哨兵模式2.4、集群模式2.5、其他命令2.6、其他操作系统 3、使用3.1、Java 代码 —…...
项目中遇到的半导体公司
作为一个技术人,我并不是亲美,从技术的实事求是角度讲,不得不感叹欧美的半导体技术。他们的datasheet能学到的东西太多太多;我甚至佩服他们缜密的逻辑。从他们的文章中领悟我们技术到底有多low,没办法一个一个了解所有…...

汇编:call与ret/retf指令
一、call指令 1.1 依据位移进行转移:call 标号 1.2 实现段间转移:call far ptr 标号 1.3 转移地址在寄存器中:call 16位寄存器 1.4 转移地址在内存中 1.4.1 call word ptr 内存单元地址 1.4.2 call dword ptr 内存单元地址…...

Fiddler抓包工具之高级工具栏中的重定向AutoResponder的用法
重定向AutoResponder的用法 关于Fiddler的AutoResponder重定向功能,主要是时进行会话的拦截,然后替换原始资源的功能。 它与手动修该reponse是一样的,只是更加方便了,可以创建相应的rules,适合批处理的重定向功能。 …...

如何基于OpenCV和Sklearn库开展数据降维
大家在做数据分析或者机器学习应用过程中,不可避免的需要对数据进行降维操作,好多垂直行业业务中经常出现数据量少但维度巨大的情况。数据降维的目的是为了剔除不相关或冗余特征,使得数据易用,去除无用数据,实现数据可…...

详解SpringAop开发过程中的坑
😉😉 学习交流群: ✅✅1:这是孙哥suns给大家的福利! ✨✨2:我们免费分享Netty、Dubbo、k8s、Mybatis、Spring...应用和源码级别的视频资料 🥭🥭3:QQ群:583783…...

【海思SS528 | VDEC】MPP媒体处理软件V5.0 | VDEC的使用总结
😁博客主页😁:🚀https://blog.csdn.net/wkd_007🚀 🤑博客内容🤑:🍭嵌入式开发、Linux、C语言、C、数据结构、音视频🍭 🤣本文内容🤣&a…...

Kubernetes sample-controller 例子介绍
sample-controller sample-controller 是 K8s 官方自定义 CDR 及控制器是实现的例子 通过使用这个自定义 CDR 控制器及阅读它的代码,基本可以了解如何制作一个 CDR 控制器 CDR 运作原理 网上有更好的文章,说明其运作原理: https://www.z…...

【C/C++指针】指针*与引用的区别
指针变量的值是所指对象的地址(准确说是首地址,其类型定义其所指对象的字节长度)引用变量的值是所引用对象本身的值 1 初始化 指针变量 可不初始化 且 可以更换指向对象 int *p;//此时是个野指针,该指针变量的值是任意值&#x…...

【ArcGIS Pro微课1000例】0039:制作全球任意经纬网的两种方式
本文讲解在ArcGIS Pro中制作全球任意经纬网的两种方式。 文章目录 一、生成全球经纬网矢量1. 新建地图加载数据2. 创建经纬网矢量数据二、布局生成经纬网1. 新建布局2. 创建地图框2. 创建经纬网一、生成全球经纬网矢量 以1:100万比例尺地图分幅为例,创建经差6、维差4的经纬网…...
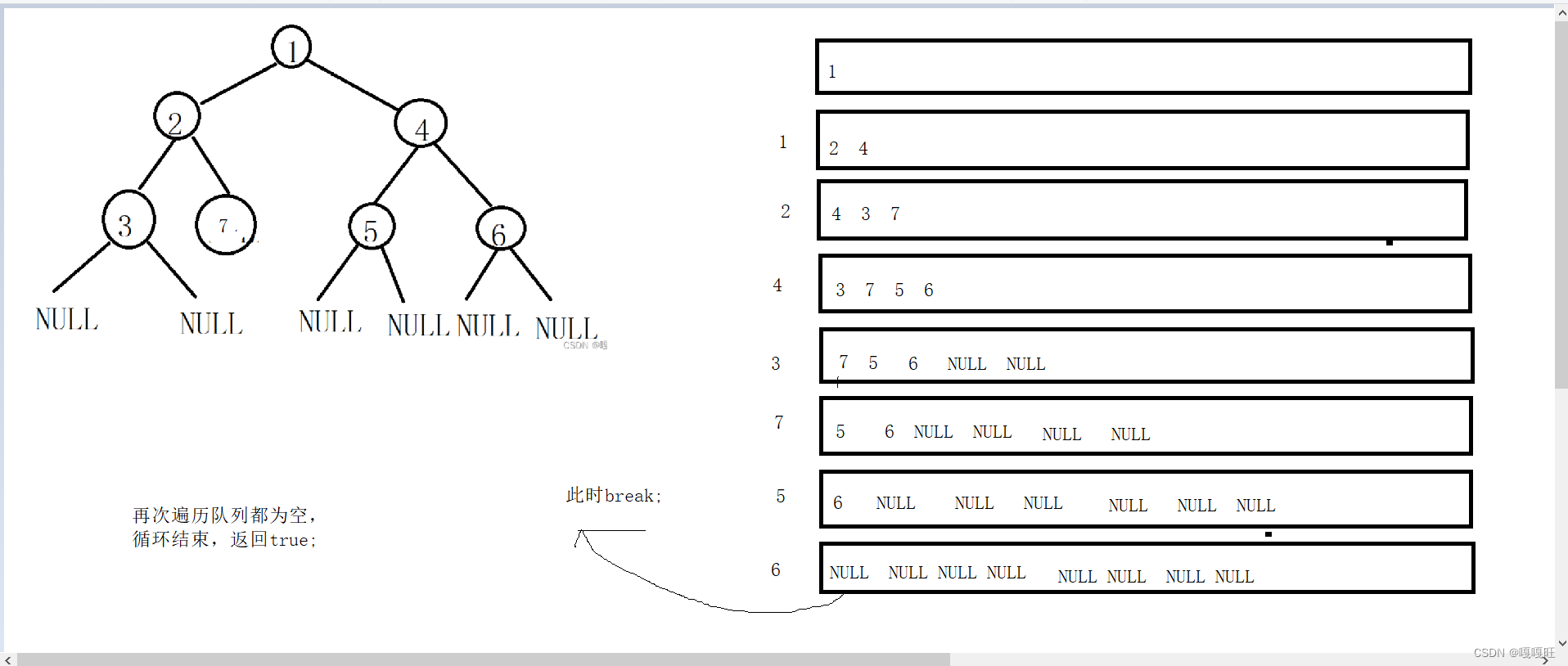
【二叉树】练习题终章
二叉树的销毁 void BTreeDestroy(BTNode* root) {if (root NULL)return;BTreeDestroy(root->left);BTreeDestroy(root->right);free(root); }递归展示图 使用后序销毁,如果用前序销毁的话,就会找不到根对应的子树的地址.下面就不能被销毁了&…...

flutter开发实战-实现获取视频的缩略图封面video_thumbnail
flutter开发实战-实现获取视频的缩略图封面video_thumbnail 在很多时候,我们查看视频的时候,视频没有播放时候,会显示一张封面,可能封面没有配置图片,这时候就需要通过获取视频的缩略图来显示封面了。这里使用了video…...

Prompt Toolkit探索:打造交互式CLI应用
简介:prompt_toolkit 是一个 Python 的库,它提供了一系列功能丰富的用户界面元素,比如自动完成、语法高亮、多行编辑、提示等等,让你可以轻松地构建出功能强大的命令行工具。而且,这个库还被 IPython 和 pgcli 这样的知…...

【已解决】AttributeError: module ‘gradio‘ has no attribute ‘outputs‘
问题描述 AttributeError: module gradio has no attribute outputs 不知道作者用的是哪个gradio版本,最新的版本报错AttributeError: module gradio has no attribute outputs , 换一个老一点的版本会报错AttributeError: module gradio has no attribu…...
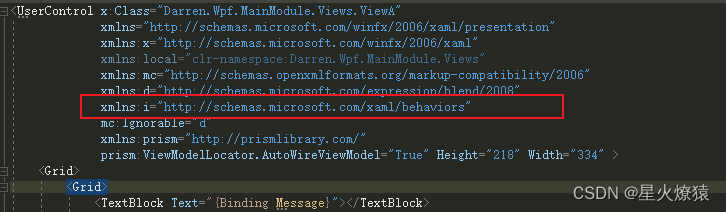
WPF Mvvm模式下面如何将事件映射到ViewModel层
前言 平常用惯了Command绑定,都快忘记传统的基于事件编程模式了,但是Commond模式里面有个明显的问题,就是你无法获取到事件源的参数。很多大聪明肯定会说,这还不简单,通过自己写控件,给控件加个自定义属性不就行了,想要啥事件就写啥事件进去,完全自主可控。但是对于写…...
C# WPF上位机开发(计算器界面设计)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 c# wpf最大的优势就是开发业务软件比较快、效率比较高。一般来说,它的界面和逻辑部分可以同时开发。界面的部分用xaml编写即可…...

[c]比较月亮大小
本题的难点就是分情况讨论 #include<stdio.h> int main() {int n;scanf("%d",&n);int arr2[n];int p;for(int m0;m<n-1;m){scanf("%d",&arr2[m]);//输入n个数保存到数组}if(n1)//当输入一个数据时,输入0,可以判断…...

【Java 基础】16 泛型
文章目录 什么是泛型?泛型的声明泛型的使用泛型方法通配符和泛型上下界1)通配符2)泛型上下界 泛型的好处注意事项 泛型提供了一种在编写代码时更好地 支持类型安全的机制。通过泛型,我们可以编写更加 通用、 灵活、 可读性高的…...
)
极简风项目交付倒计时!:紧急修复MJ --v 6.2中隐藏的1.33倍宽高比偏移Bug,避免客户验收驳回(含补救Prompt包)
更多请点击: https://intelliparadigm.com 第一章:极简风项目交付倒计时! 当交付周期压缩至 72 小时,极简风不再是一种美学选择,而是工程效率的刚性约束。我们摒弃冗余文档、跳过非核心评审环节,聚焦于可…...

2026年主流抓娃娃App大对比,哪个才是你的“抓宝神器”?
在当今快节奏的生活中,年轻人面临着来自学业、工作、社交等多方面的压力。为了缓解这些压力,寻找适合的解压方式成为了大家的共同需求。抓娃娃App作为一种新兴的娱乐方式,正逐渐受到年轻人的喜爱。下面我们就从潮流趋势、科技前沿、行业洞察等…...

MemPrivacy:面向端云智能体的隐私保护个性化记忆管理框架
之前文章介绍过:89.2%攻击成功率!腾讯、字节研究发现 OpenClaw Agent 存在可利用结构性漏洞 今天介绍一个 MemPrivacy 项目,来自 MemTensor、荣耀和同济大学的联合团队。 他们的研究让云端智能体能正常"记住你",但永远看…...

CircuitPython Web Workflow实战:无线开发Yoto Mini与I2C硬件验证
1. 项目概述与核心价值如果你玩过像树莓派Pico或者ESP32这类微控制器,肯定对“插拔-编程-调试”这个循环不陌生。每次改几行代码,就得拔下USB线,重新上电,然后盯着串口监视器看输出。这个过程在项目初期调试硬件时,尤其…...

基于Rust与Candle的AI推理引擎cria:简化大模型本地部署与优化
1. 项目概述:从“左移”到“创造”的AI推理引擎 最近在折腾AI模型本地部署和推理优化的朋友,可能都绕不开一个名字: cria 。这个由 leftmove 开源的项目,全称是“Cria: The AI Inference Engine”,直译过来就是“创…...

安得医疗冲刺港股:年营收9亿,利润1.5亿 上海亿瑞控制41%股权
雷递网 雷建平 5月16日山东安得医疗用品股份有限公司(简称:“安得医疗”)日前递交招股书,准备在港交所上市。截至2023年、2024年及2025年12月31日止年度,安得医疗分别宣派及派付股息6670万元、4670万元及4000万元。年营…...

5分钟学会创建专业交通网络可视化地图
5分钟学会创建专业交通网络可视化地图 【免费下载链接】transit-map The server and client used in transit map simulations like swisstrains.ch 项目地址: https://gitcode.com/gh_mirrors/tr/transit-map 你想在网页上展示动态的公共交通网络吗?Transit…...

树莓派5驱动128x128 LED矩阵:打造复古PICO-8游戏艺术墙
1. 项目概述与核心思路我一直对复古游戏和像素艺术情有独钟,也一直想在家里弄一个既有科技感又能玩的装饰品。最近,我把树莓派5、四块64x64的RGB LED矩阵面板和PICO-8幻想游戏机捣鼓到了一起,成功在墙上挂起了一个128x128像素的“游戏艺术墙”…...

Node.js代理池实战:proxy-agents库核心原理与高级应用
1. 项目概述与核心价值最近在折腾一些需要处理大量网络请求的自动化脚本,比如数据采集、API测试或者模拟用户操作,一个绕不开的痛点就是IP被封。单个IP频繁请求,对方服务器很容易就把你拉黑了。这时候,代理池就成了刚需。市面上成…...

BeagleBone Black设备树覆盖层实战:从原理到自定义SPI/UART配置
1. 项目概述:为什么BeagleBone Black开发者必须掌握设备树?如果你正在使用BeagleBone Black(BBB)进行嵌入式开发,并且已经不止一次地困惑于为什么某个外设(比如UART、SPI或者某个GPIO)无法按预期…...