[足式机器人]Part4 南科大高等机器人控制课 Ch00 课程简介
本文仅供学习使用
本文参考:
B站:CLEAR_LAB
课程主讲教师:
Prof. Wei Zhang
南科大高等机器人控制课 Ch00 课程简介
- 1. What is this course about?
- 2. Tentative Schedule暂定时间表
1. What is this course about?
- Develop a solid foundation in robot modeling and control to conduct cutting edge research in robotics
Math : Linear Algebra, Optimization
Modeling: Advanced rigid body kinematics and dynamics(screw theory and spatial vectors)
Optimization: learn how to formulate robotic decision and control problem as tractable optimization problems
Control: Nonlinear control, optimal control, Model Predictive Control (Lyapunovfunc)
- Journal : TR-O, IJRR, ICRA, IROS
2. Tentative Schedule暂定时间表
- Continuous time linear systems and Matrix Exponential
- Advanced Kinematics and Dynamics
2.1 Rigid body configuration and velocity
2.2 Exponential coordinate of rigid body motion
2.3 Kinematics of open chain
2.4 Rigid body dynamics
2.5 Multibody dynamics(Recursive Newton-Euler Algorithm, inverse and forward dynamics) - Basic Optimization
3.1 Optimization problems and basicduality theory([数] 对偶理论; 二元论)
3.2 Semi-definite Programming(SDP) and linear matrix inequalities - Nonlinear Stability and Stabilization
4.1 Lyapunov stability theory
4.2 Numerical construction of Lyapunov functions via semi-definite programming
4.3 Control-Lyapunov Function for stabilization - Basic Robot Control
5.1 Differential IK
5.2 Robot Motion Control(Computed Torque Method Task-space Inverse Dynamics-TSID) - Optimal Control and Model Predictive Control
6.1 Optimal control problem and dynamic programming
6.2 Model Predictive Control for Linear Systems
6.3 General MPC Theory(Closed-loop stability, recursive feasibility)
相关文章:

[足式机器人]Part4 南科大高等机器人控制课 Ch00 课程简介
本文仅供学习使用 本文参考: B站:CLEAR_LAB 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch00 课程简介 1. What is this course about?2. Tentative Schedule暂定时间表 1. What is this course about? Develop a solid found…...
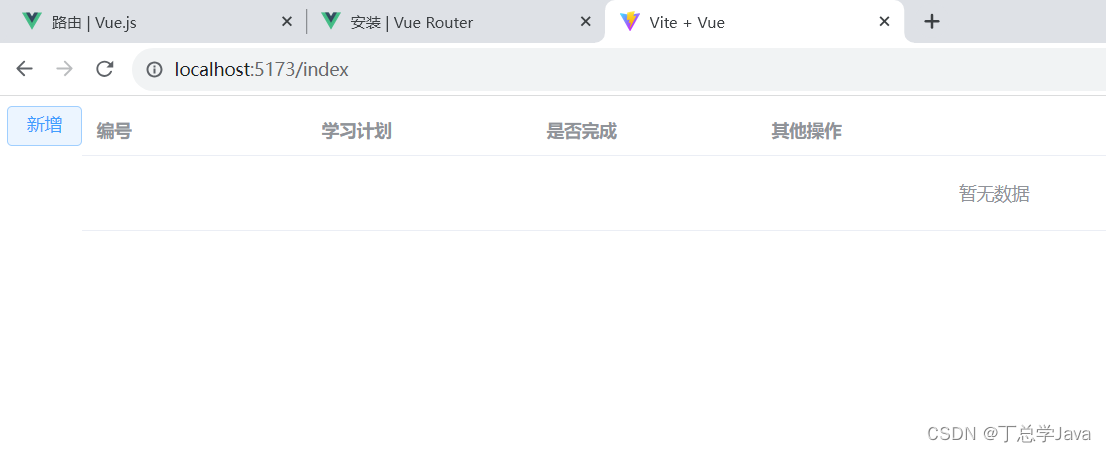
SSM项目实战-登录验证成功并路由到首页面,Vue3+Vite+Axios+Element-Plus技术
1、util/request.js import axios from "axios";let request axios.create({baseURL: "http://localhost:8080",timeout: 50000 });export default request 2、api/sysUser.js import request from "../util/request.js";export const login (…...

Python----网络爬虫
目录 1.Robots排除协议 2.request库的使用 3.beautifulsoup4库的使用 Python网络爬虫应用一般分为两部: (1)通过网络连接获取网页内容 (2)对获得的网页内容进行处理 - 这两个步骤分别使用不同的函数库:requests …...

【微信小程序】上传头像 微信小程序内接小程序客服
这里写目录标题 微信小程序上传头像使用button按钮包裹img 微信小程序内接小程序客服使用button按钮跳转客服 微信小程序上传头像 使用button按钮包裹img 原本思路是只使用image标签再加上chooseImg,但发现使用button标签上传头像这种方法更实用。微信小程序文档上…...

【c++随笔15】c++常用第三方库
【c随笔15】c常用第三方库 一、数据库相关:HDFS、libpq、SQLite、RocksDB、unixODBC、Nanobdc、Ignite ; 二、网络通信相关:libcurl、libevent、libssh、mosquitto、nghttp2、libuv; 三、加密和安全相关:1、OpenSSL 四…...
数据结构 | 查漏补缺之ASL、
目录 ASL 情形之一:二分查找 线索二叉树 哈夫曼树 大根堆 邻接表&邻接矩阵 ASL 参考博文 关于ASL(平均查找长度)的简单总结_平均查找长度asl-CSDN博客 情形之一:二分查找 线索二叉树 参考博文 线索二叉树(线索链表遍历,二叉树…...

泊车功能专题介绍 ———— 汽车全景影像监测系统性能要求及试验方法(国标未公布)
文章目录 术语和定义一般要求功能要求故障指示 性能要求响应时间图像时延单视图视野范围平面拼接视图视野平面拼接效果总体要求行列畸变拼接错位及拼接无效区域 试验方法环境条件仪器和设备车辆条件系统响应时间试验图像时延试验单视图视野范围试验平面拼接视图视野试验平面拼接…...
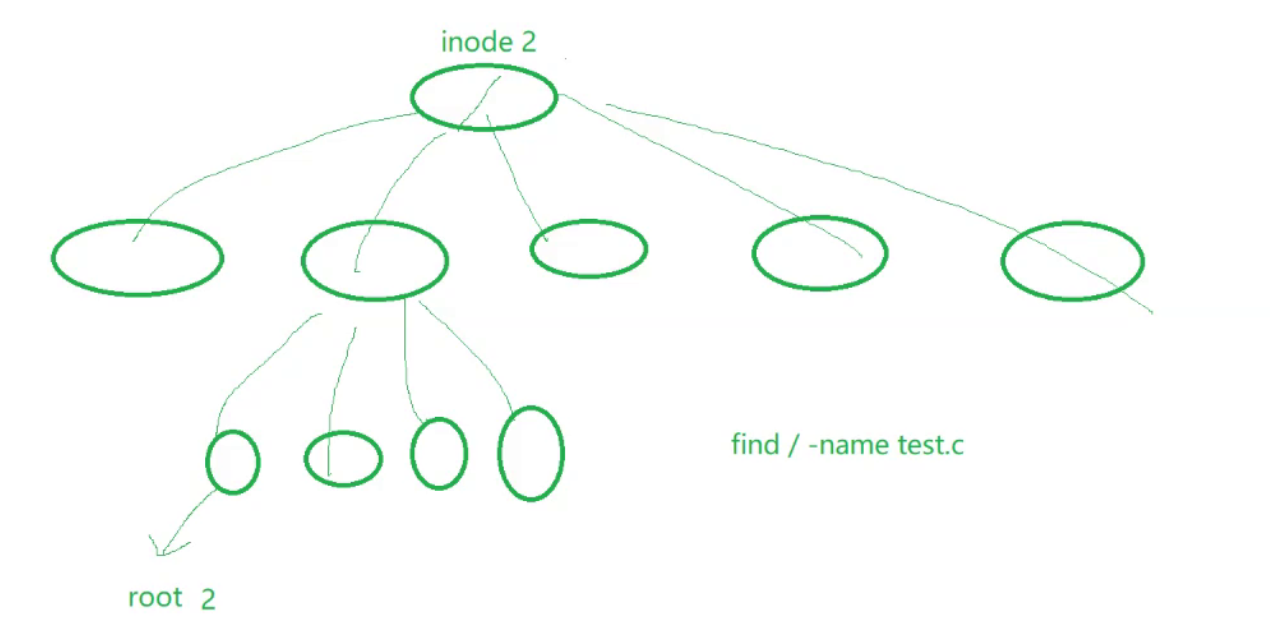
【Linux】第二十六站:软硬链接
文章目录 一、软链接二、硬链接三、ln命令四、该如何理解硬链接?五、如何理解软链接六、为什么要用软硬链接1.软链接的应用场景2.硬链接的应用场景 一、软链接 如下所示,我们创建一个文件以后,然后执行下面的指令 ln -s file.txt soft-link…...

开源播放器GSYVideoPlayer + ViewPager2 源码解析
开源播放器GSYVideoPlayer ViewPager2 源码解析 前言一、GSYVideoPlayer🔥🔥🔥是什么?二、源码解析1.ViewPager2Activity 总结 前言 本文介绍GSYVideoPlayer源码中关于ViewPager2 GSYVideoPlayer 实现的滑动播放列表的实现原理。…...

重启路由器可以解决N多问题?
为什么重启始终是路由器问题的首要解决方案? 在日常的工作学习工作中,不起眼的路由器是一种相对简单的设备,但这仍然是我们谈论的计算机。 这种廉价的塑料外壳装有 CPU、随机存取存储器 (RAM)、只读存储器 (ROM) 和许多其他组件。 该硬件运行预装的软件(或固件)来管理连接…...

Python WebSocket 客户端教程
WebSocket 是一种在客户端和服务器之间实现双向通信的协议,常用于实时聊天、实时数据更新等场景。Python 提供了许多库来实现 WebSocket 客户端,本教程将介绍如何使用 Python 构建 WebSocket 客户端。 什么是 WebSocket WebSocket 是一种基于 TCP 协议…...

洛谷 P2984 [USACO10FEB] Chocolate Giving S
文章目录 [USACO10FEB] Chocolate Giving S题面翻译题目描述输入格式输出格式 题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1 题意解析CODE给点思考 [USACO10FEB] Chocolate Giving S 题面翻译 题目链接:https://www.luogu.com.cn/problem/P2984 题目描…...
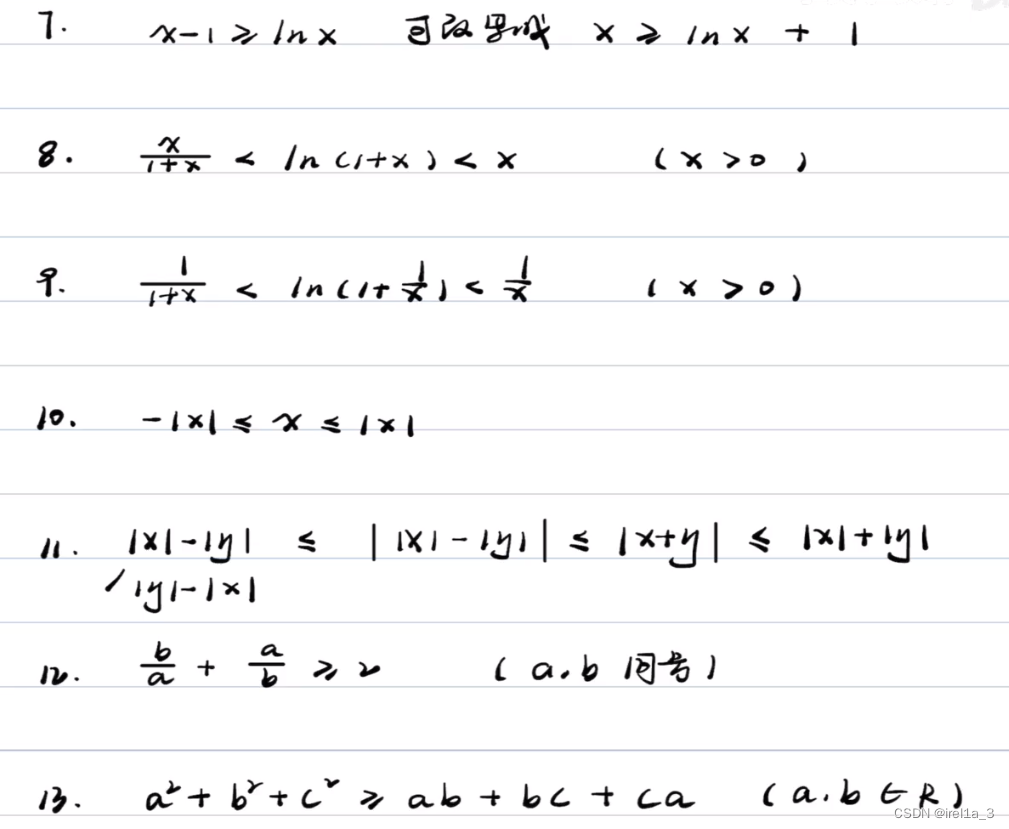
【专题】【数列极限】
【整体思路】 【常用不等式】...

oracle基础系统学习文章目录
oracle基础系统学习——点击标题可跳转对应文章 01.CentOS7静默安装oracle11g 02.Oracle的启动过程 03.从简单的sql开始 04.Oracle的体系架构 05.Oracle数据库对象 06.Oracle数据备份与恢复 07.用户和权限管理 08.Oracle的表 09.Oracle表的分区 10.Oracle的同义词与序列 11.Or…...
长度最小的子数组(Java详解)
目录 题目描述 题解 思路分析 暴力枚举代码 滑动窗口代码 题目描述 给定一个含有 n 个正整数的数组和一个正整数 target 。 找出该数组中满足其和 ≥ target 的长度最小的 连续子数组 [numsl, numsl1, ..., numsr-1, numsr] ,并返回其长度。如果不存在符合条…...

计算机组成学习-数据的表示和运算总结
复习本章时,思考以下问题: 1)在计算机中,为什么要采用二进制来表示数据?2)计算机在字长足够的情况下能够精确地表示每个数吗?若不能,请举例说明。3)字长相同的情况下,浮点数和定点数的表示范围…...
(八))
目标检测YOLO系列从入门到精通技术详解100篇-【目标检测】机器视觉(基础篇)(八)
目录 前言 知识储备 机器视觉学习路线 视觉算法流程...

【4】基于多设计模式下的同步异步日志系统-框架设计
7. 日志系统框架设计 本项⽬实现的是⼀个多日志器日志系统,主要实现的功能是让程序员能够轻松的将程序运行日志信息落地到指定的位置,且⽀持同步与异步两种方式的日志落地方式。 项目的框架设计将项目分为以下几个模块来实现。 日志等级模块 日志等级模…...
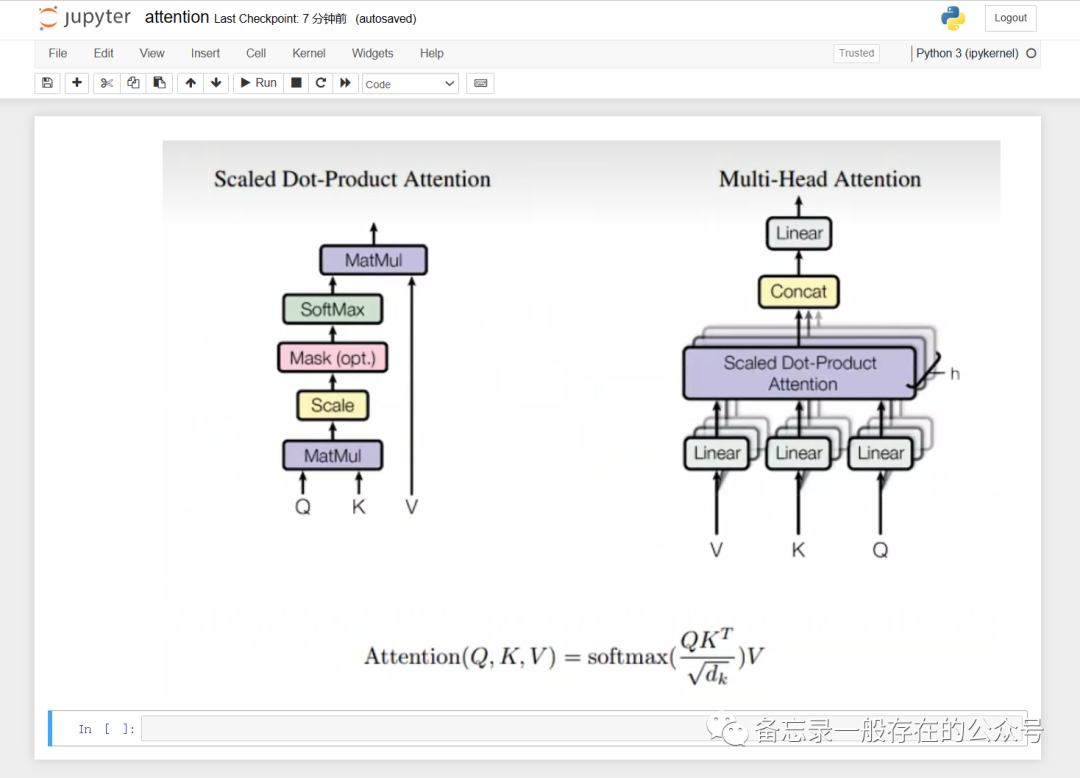
Jupyter Markdown 插入图片
首先截图 注意 这一步是关键的!! 它需要使用电脑自带的截图,用qq啊vx啊美图秀秀那些都不行哦。 截图之后复制: 然后快捷键粘贴到jupyter里面,它会生成一段代码(没有代码就是说截图形式不对)&a…...
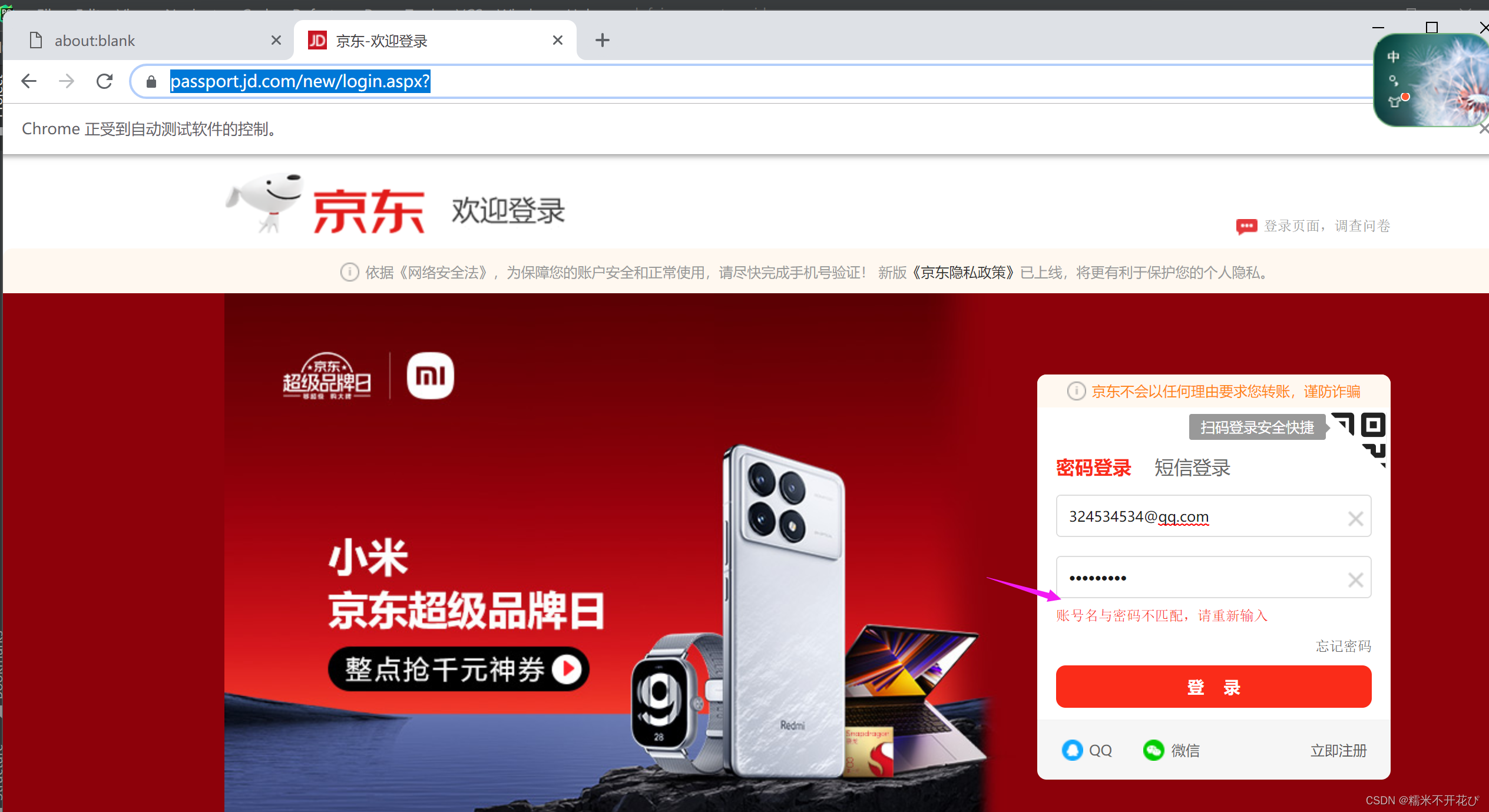
web自动化 -- pyppeteer
由于Selenium流行已久,现在稍微有点反爬的网站都会对selenium和webdriver进行识别,网站只需要在前端js添加一下判断脚本,很容易就可以判断出是真人访问还是webdriver。虽然也可以通过中间代理的方式进行js注入屏蔽webdriver检测,但…...

为什么92%的AI音频项目在ElevenLabs声音库选型阶段就失败?——资深AI音频架构师12年踩坑复盘
更多请点击: https://intelliparadigm.com 第一章:为什么92%的AI音频项目在ElevenLabs声音库选型阶段就失败? ElevenLabs 的声音库看似丰富——超 500 个语音模型、多语言支持、情感调节滑块一应俱全,但真实项目落地中࿰…...

从ValueError到精准评估:解决超分辨率重建中SSIM/PSNR计算的三大实战难题
1. 从报错到理解:新版skimage的SSIM/PSNR计算函数变迁 第一次用skimage计算超分辨率重建指标时,我就被当头一棒——熟悉的compare_ssim和compare_psnr居然报"ImportError"。这就像你习惯去小区东门拿快递,突然发现快递柜搬到了西门…...

告别重复操作:M9A如何用智能自动化重塑《重返未来:1999》游戏体验
告别重复操作:M9A如何用智能自动化重塑《重返未来:1999》游戏体验 【免费下载链接】M9A 重返未来:1999 小助手 | Assistant For Reverse: 1999 项目地址: https://gitcode.com/gh_mirrors/m9/M9A 在当今快节奏的生活中,游戏…...

可视化大屏怎么做?可视化大屏工具你会用吗?
可视化大屏早已不只是技术人员的专属,越来越多的运营、产品和市场人也开始尝试,但是常常陷入各种问题:比如硬件效果一般、数据堆积没重点、动效杂乱干扰信息传达……其实归根结底,这些问题都指向一个核心:缺少一个专业…...

思源宋体:中文排版设计中的成本效益革命
思源宋体:中文排版设计中的成本效益革命 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 你是否曾为商业项目中的中文字体授权费用而头疼?或者为寻找既专业又免费…...

[特殊字符] MarkText使用指南
📝 MarkText使用指南 【免费下载链接】marktext 📝A simple and elegant markdown editor, available for Linux, macOS and Windows. 项目地址: https://gitcode.com/gh_mirrors/ma/marktext ⚡ 快速入门教程 ❤️ 高级功能详解 ### 在列表中使…...

74HC595移位寄存器:3个GPIO扩展8路输出,级联驱动多路LED/继电器
1. 项目概述与核心价值在捣鼓嵌入式项目,尤其是玩灯光控制、驱动多路继电器或者做个小型的数字显示屏时,最常遇到的瓶颈是什么?十有八九是微控制器(比如常见的ESP32、Arduino Uno、树莓派Pico)上的GPIO引脚不够用了。一…...

Sora提示词工程:从静态描述到动态世界导演的AI视频创作指南
1. 项目概述:当“提示词”成为Sora的“方向盘”最近在AI视频生成圈子里,一个叫SoraEase/sora-prompt的项目开始被频繁提及。乍一看,这只是一个GitHub上的开源仓库,里面可能收集了一些用于OpenAI Sora模型的提示词(Prom…...
)
动漫分镜图批量生成实战:用/mj batch+自定义--style raw指令链,单日产出24张电影级分镜(附可复用Prompt矩阵表)
更多请点击: https://intelliparadigm.com 第一章:动漫分镜图批量生成的核心价值与技术边界 动漫分镜图(Storyboard)是动画制作前期的关键资产,传统手绘或半自动流程耗时长、风格不一致、迭代成本高。批量生成技术通…...

Python性能优化实战:Numba JIT编译器原理与高性能计算应用
1. 项目概述:当Python遇上性能瓶颈,Numba如何成为“救火队长”?在数据科学、科学计算和机器学习领域,Python以其简洁的语法和丰富的生态库(如NumPy、Pandas、SciPy)成为了事实上的标准语言。然而࿰…...