SpectralGPT: Spectral Foundation Model 论文翻译3
遥感领域的通用大模型 2023.11.13在CVPR发表
原文地址:[2311.07113] SpectralGPT: Spectral Foundation Model (arxiv.org)
E.消融研究
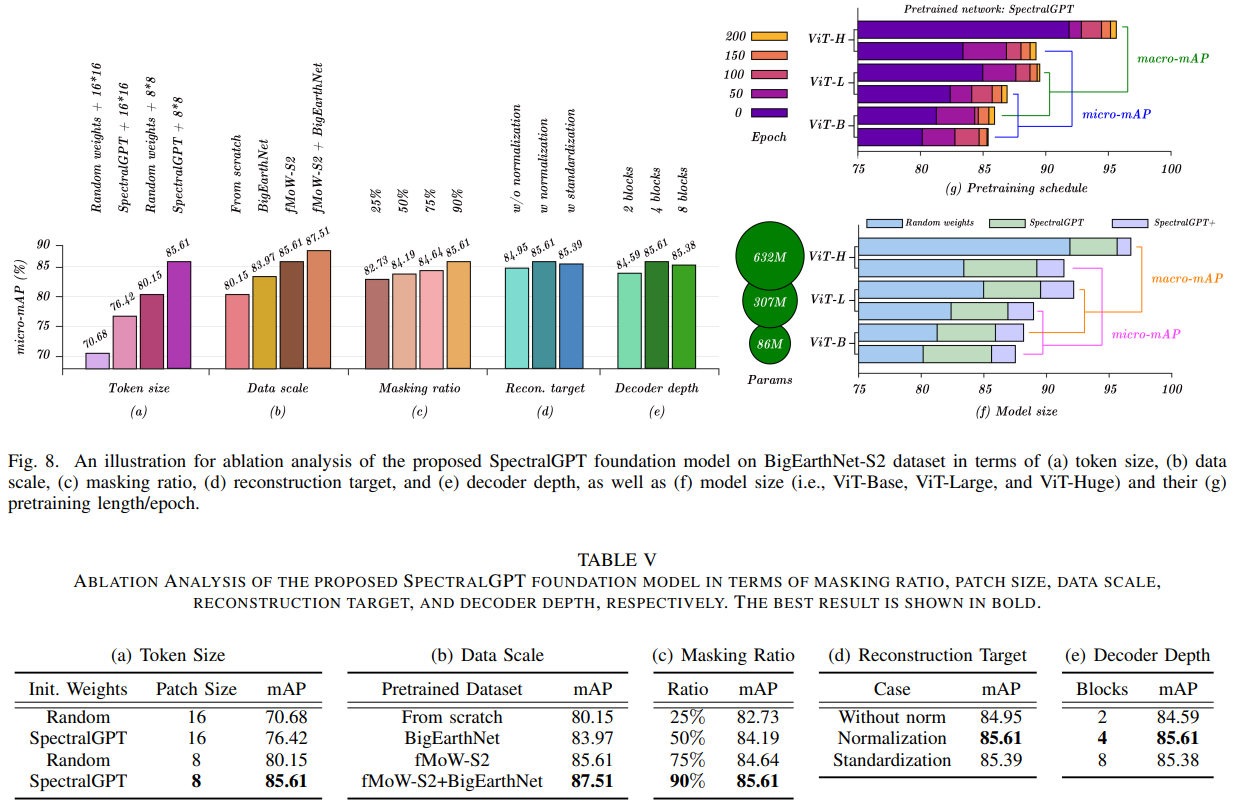
在预训练阶段,我们对可能影响下游任务表现的各种因素进行了全面研究。这些因素包括掩蔽比、ViT patch大小、数据规模、重建目标、解码器深度、模型尺寸。为了对预训练模型进行更严格的评估,我们在BigEarthNet多标签分类数据集上对所有消融模型进行微调,只使用训练集的10%子集,这是一个更艰巨的挑战,使用mAP测量进行评估。我们选择ViT-B作为主干模型,保证了实验间的一致性。除了涉及数据规模和训练计划长度的缩减外,所有模型都在fMoW-S2数据集上进行了200 epoch的预训练。这个全面的评估框架使我们能够更深入地了解这些因素对模型性能的影响。
1)token大小:表V(a)图8(a)提供了token大小对模型性能影响的重要见解,一致表明较大的patch大小会导致模型性能降低,这与先前的研究结果一致[30]。这种现象可以归因于ViT架构的内在特征。对于较大的令牌大小,例如16 x 16,每个图像包含较少的令牌,从而导致随着模型通过其更深层的进展,细粒度空间信息的减少。因此,空间细节的减少会对模型的整体性能产生负面影响。然而,值得注意的是,无论token大小设置如何,预训练模型始终增强mAP,强调其在各种配置中提高性能的能力。值得注意的是,尽管输入图像的大小为96 × 96或128 × 128,但标记大小为8 × 8时的识别性能明显优于16 × 16,强调了预训练模型的多功能性和有效性。
2)数据规模:表V(b)和图8(b)针对预训练数据在我们研究中的影响进行了综合分析。我们使用两个数据集(即fMoW-S2, BigEarthNet)进行预训练,同时保持标准输入图像大小为96 × 96。为了更深入地研究这种比较,我们最初专门在fMoW-S2上预训练模型,然后在BigEarthNet上无缝地继续预训练,没有任何中间的微调步骤。我们的预训练数据集包括fMoW-S2的广泛训练集,其中包括来自世界各地的令人印象深刻的712,874张图像,以及BigEarthNet的训练集,其中包括欧洲地区的351,496张图像,其中不包括受雪,云或云阴影影响的图像。
表V(b)中的分析强调了数据规模和分布对模型预训练的实质性影响。在与下游任务相同的数据集上预训练的模型始终表现出优异的性能,突出了数据集一致性在有效迁移学习中的关键作用。此外,fMoW-S2在预训练方面优于BigEarthNet,主要是由于其更大的数据集和更广泛的地理覆盖。有趣的是,持续预训练的概念,结合了两个数据集,导致模型具有更高的mAP分数。这种改进可以部分归因于fMoWS2预训练期间的96 × 96图像到BigEarthNet预训练期间的128 × 128图像的过渡,强调了增加图像大小对整体模型效率的有益影响。在与下游任务相同的数据集上预训练的模型始终表现出优异的性能,突出了数据集一致性在有效迁移学习中的关键作用。此外,fMoW-S2在预训练方面优于BigEarthNet,主要是由于其更大的数据集和更广泛的地理覆盖。有趣的是,持续预训练的概念,结合了两个数据集,导致模型具有更高的mAP分数。这种改进可以部分归因于fMoWS2预训练期间的96 × 96图像到BigEarthNet预训练期间的128 × 128图像的过渡,强调了增加图像大小对整体模型效率的有益影响。
3)掩蔽比:表V©和图8©揭示了掩蔽比的影响,揭示了一个值得注意的趋势,即掩蔽比越高,模型性能越好。与传统的75%的掩模率不同,我们发现多光谱图像的最佳掩模率为90%。这一观察结果与[29]中提出的假设相一致,即MIM方法中的掩蔽比与数据中的信息冗余复杂相关。多光谱图像本身具有更大的信息冗余,其光谱带之间具有很强的相关性。因此,更高的掩蔽比对于模型有效地从这些图像中学习有意义的表示是必不可少的。此外,90%的掩蔽率显著提高了预训练阶段的效率,降低了记忆复杂度加快训练时间,为模型开发提供实际优势。
4)重建目标:表V(d)和图8(d)对多光谱图像背景下重建目标对归一化、标准化数据和未归一化、标准化的原始数据的影响进行了深入分析。规范化(将所有数据缩放到[0,1]范围)和标准化(将数据转换为均值为0和标准差为1)是两个研究的目标。值得注意的是,结果显示归一化和标准化重建目标之间的模型性能差异很小,主要是因为这两个目标都属于像素级数据转换。然而,在原始数据上进行预训练的模型的性能要比具有归一化重建目标的模型差得多。我们将这种现象归因于多光谱图像的特性。光谱值通常数值较大,且在不同频带之间变化,因此在原始数据上预训练的模型可能需要较长的保持时间才能收敛并显示出与在规范化和标准化数据上预训练的模型相同的性能。我们的观点表明,在特定的表示空间中使用更具语义意义的目标可能会提高模型的性能。
5)解码器深度:表V(e)和图8(e)考察了解码器深度对模型性能的影响,遵循MIM方法的原则,其中预训练的编码器作为下游任务的骨干,同时丢弃解码器组件。值得注意的是,结果表明浅解码器配置不适合光谱模型预训练。这一观察结果与假设相一致,即光谱图像具有高维和复杂性的特征,需要具有增强容量的解码器,这与该领域的先前发现一致[29]。
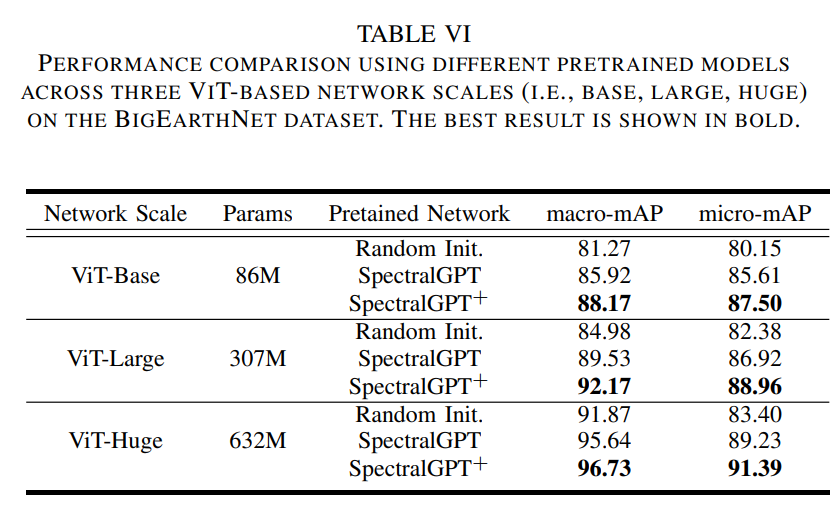
6)模型大小:表VI和图8(f)对ViT-B和Vit-L的微调结果进行了定量和定性的对比分析,揭示了令人信服的见解。列出了macro-mAP和micro-mAP,以综合评价模型的性能。具有12个transformer层和8600万个参数的ViT-B在采用该方法时表现出了有希望的性能提升,实现了mAP(微)为85.41,比从头开始训练的ViT-B高出5.26。另一方面,具有24层3.07亿个参数的ViT-L明显优于ViT-B, mAP(micro)为86.92,明显超过从头训练的模型4.44。此外,ViT-B共有32层,6.32亿个参数,极大地提高了BigEarthNet上神经网络的性能,mAP(micro)为89.23。值得注意的是,尽管我们的模型只对10%的下游训练数据进行了微调,但使用SpectralGPT+预训练权值的ViT-H模型击败了所有使用整个训练集训练的模型,SOTA mAP(micro)为91.39。这些结果强调了适当的预训练策略的关键作用,并表明更大的ViT模型能够学习更复杂的图像表示,使它们非常适合要求更高精度的任务。
7)预训练计划:在图8(g)中,我们展示了不同预训练时期训练的模型的微调结果,分别使用macro-mAP和micro-mAP指标进行评估。值得注意的是,与从头开始训练的模型相比,仅预训练50次的模型表现出显著的性能提升。图中观察到的趋势表明,模型继续受益于更长的预训练时期,这表明延长的训练可以进一步提高性能。此外,表VI中的结果强化了这一发现,因为与ViT-B相比,ViT-L和ViT-H始终获得更高的mAP,突出了扩展预训练和更大模型架构的有效性。
F.目视比较和地理特征可恢复性
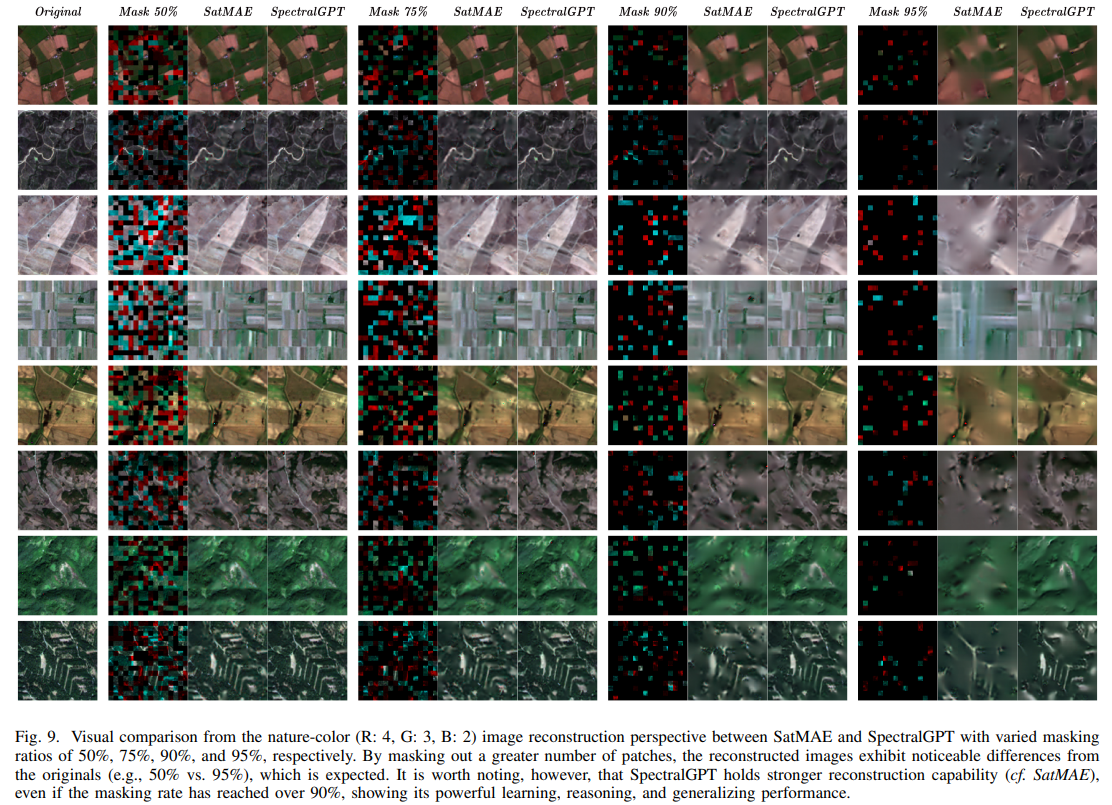
以不同的掩蔽比(即50%、75%、90%和95%)作为输入,图9直观地展示了使用SatMAE和我们的SpectralGPT获得的图像重建结果。不出所料,随着掩蔽比的增加,重建图像与原始图像的偏差越大。然而,值得强调的是,所提出的SpectralGPT在光谱图像重建性能方面明显优于SatMAE,特别是在保留视觉结构和纹理细节方面。具体来说,当使用50%的可见斑块时,SatMAE的重建结果与使用SpectralGPT的结果相当,尽管SatMAE结果中的某些细节略有模糊。随着掩模比例的增加(例如,从75%的掩模增加到90%,再增加到95%),SatMAE的重建性能大幅下降。相比之下,我们的SpectralGPT表现出优越的重建能力(参见SatMAE)。即使掩蔽率超过90%,关键结构和形状组件仍然保留在视觉中,这表明我们的模型具有强大的学习、推理和泛化能力。
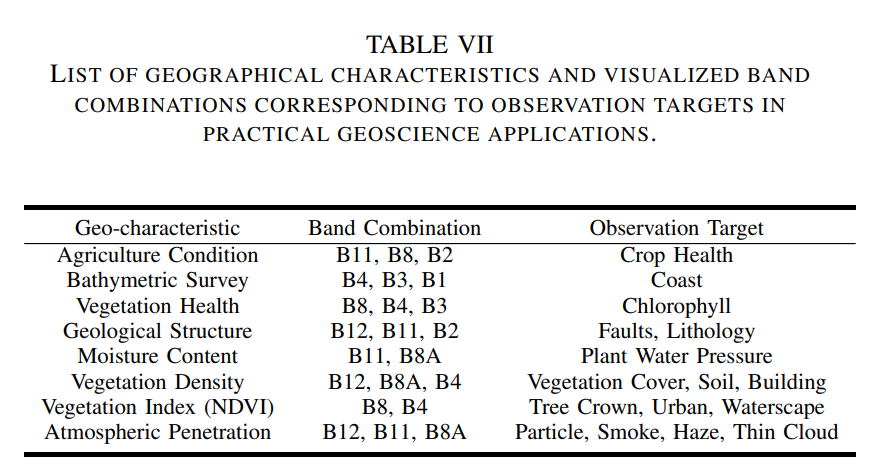
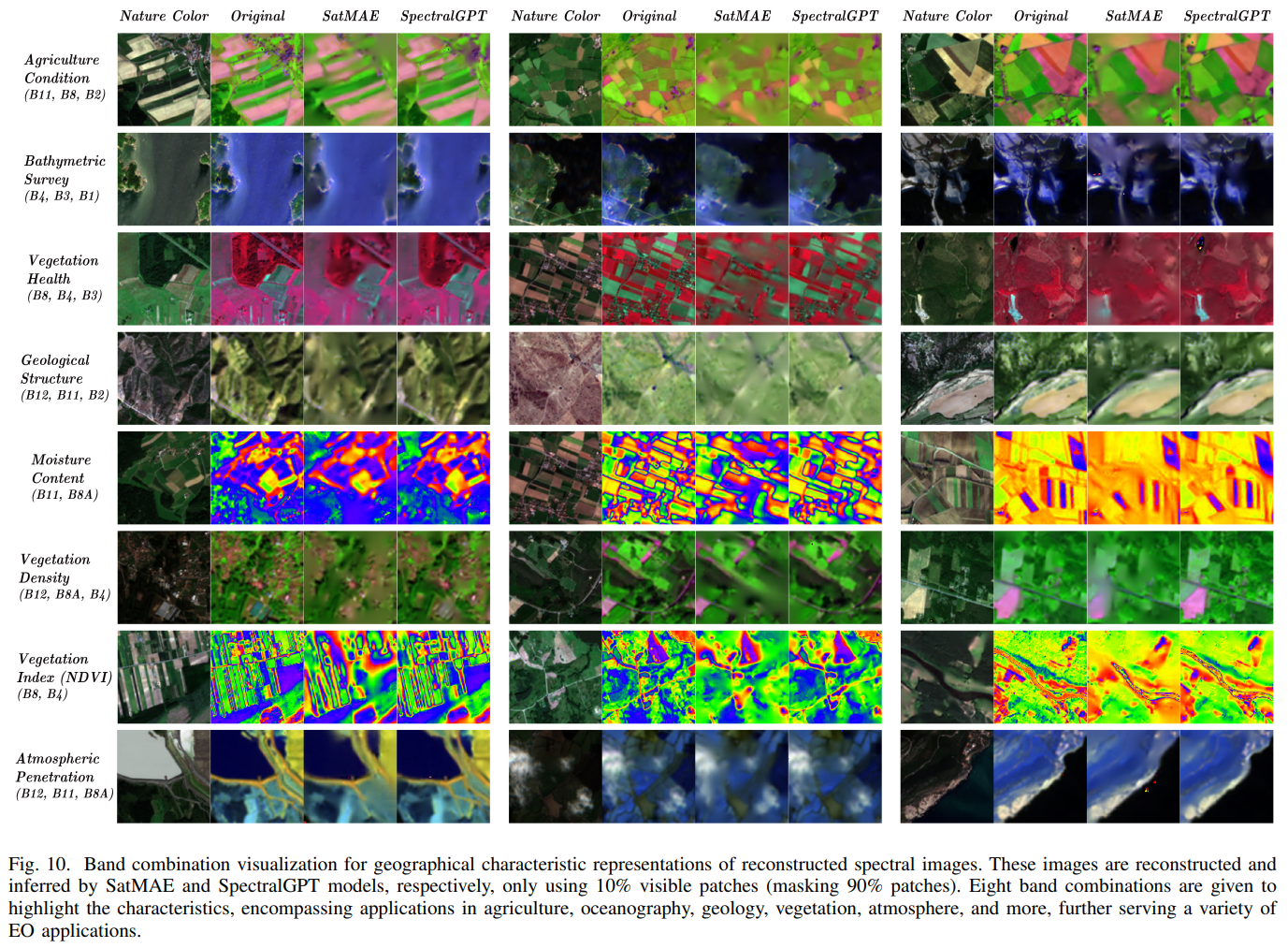
除了关于掩蔽比的深入讨论和灵敏度分析外,我们还通过仅使用10%的可见斑块,其余部分被掩盖,对光谱重建能力进行了更广泛的调查。这些研究利用各种光谱波段组合,优先考虑地理特征的表示。如图10所示,我们展示了八种不同波段组合的可视化。这些可视化效果清楚地突出了我们提出的SpectralGPT的显著优势(更接近生成的原始图像)特别是在波段频谱重建能力及其在EO任务背景下的应用价值方面。在我们的研究中,我们确定了与实际应用中的观测目标相对应的八个地质特征,详见表七。此外,使用SatMAE和SpectralGPT获得的地质特征在视觉上存在明显差异。这些明显的视觉差异可归因于与我们更强大的SpectralGPT相比,SatMAE相对有限的重建和推理能力造成的光谱退化。
结论
基础模型的爆炸性发展代表了深度学习出现后的重大技术革命。目前,各个行业正在见证技术和应用进步的重大飞跃,这在很大程度上是由基础模型的出现所推动的。RS领域也不例外,有许多EO应用程序,获得了显著的好处。光谱成像因其能够提供对观测物体和材料组成的丰富见解而获得了EO的认可,使其成为一项具有巨大潜力的变革性技术,可以应对全球挑战并重塑各个行业。然而,来自各种RS平台的光谱数据的不断扩大的可用性无疑带来了巨大的挑战。目前迫切需要开发专门为光谱遥感数据设计的基础模型。为了充分释放和利用光谱遥感数据的潜力,必须克服和解决几个具有挑战性的障碍。这包括有效处理和利用来自不同来源的各种RS光谱大数据,从复杂的空间-光谱混合信息中提取有意义的知识表示,以及解决相邻光谱相关建模的光谱退化问题。
为了应对这些挑战,我们提出了SpectralGPT,这是一个定制的光谱RS基础模型,具有新颖的3D GPT架构。凭借其创新的3D GPT架构,超过100万张光谱图像和超过6亿个参数的训练,SpectralGPT赋予光谱RS大数据的智能处理能力。SpectralGPT可以灵活地处理大小、分辨率、时间变化率和地理覆盖范围方面的各种输入。这种3D掩蔽策略可以有效地从空间光谱耦合令牌中提取信息。此外,创新的多目标重建能够捕获序列保持的光谱特征-。特性,同时减少频谱退化。值得注意的是,我们的渐进式训练模式增强了基础模型的能力,超越了性能上的过渡点。SpectralGPT取得的这些突破使光谱RS大数据的访问更加大众化,使其更容易获得,更符合大规模EO应用的成本效益。
我们的研究还包括对基于mae的预训练基础模型的综合评估,重点是光谱重建能力。我们系统地评估了模型的性能,输入范围从50%到低至5%的可见标记。这种广泛的分析使我们能够衡量他们在光谱重建和推断方面的熟练程度,特别是在地理领域,如农业领域、自然、海洋学、地质学和植被。利用SatMAE和SpectralGPT对重建光谱图像的波段组合进行可视化,证明了后者在实际EO任务和Geo-field应用中的潜力。
展望未来,我们的研究将追求几个目标。我们计划扩大用于训练的RS数据的数量和多样性,包括各种模式、分辨率、时间序列和图像大小。这种丰富将增强RS基础模型的鲁棒性。此外,我们的目标是通过整合更广泛的下游任务来扩展SpectralGPT的能力。这将使SpectralGPT成为一种通用的人工智能模型,具有更好的泛化能力,非常适合各种EO和地球科学应用。
相关文章:
SpectralGPT: Spectral Foundation Model 论文翻译3
遥感领域的通用大模型 2023.11.13在CVPR发表 原文地址:[2311.07113] SpectralGPT: Spectral Foundation Model (arxiv.org) E.消融研究 在预训练阶段,我们对可能影响下游任务表现的各种因素进行了全面研究。这些因素包括掩蔽比、ViT patch大小、数据规…...

ubuntu-c++-可执行模块-动态链接库-链接库搜索-基础知识
文章目录 1.动态链接库简介2.动态库搜索路径3.运行时链接及搜索顺序4.查看可运行模块的链接库5.总结 1.动态链接库简介 动态库又叫动态链接库,是程序运行的时候加载的库,当动态链接库正确安装后,所有的程序都可以使用动态库来运行程序。动态…...

HTML中使用JavaScript实现一个简单的鼠标悬停特效。
代码中,我们首先在CSS中定义了一个红色的方块,然后使用:hover伪类定义了鼠标悬停时的样式。接着,在JavaScript中定义了一个函数showMessage(),用于在控制台输出一条消息。最后,在HTML中使用<div>标签定义了一个i…...

深入.NET平台和C#编程总结大全
第一章 简单认识.NET框架 (1)首先我们得知道 .NET框架具有两个主要组件:公共语言进行时CLR(Common Language Runtime)和框架类库FCL(Framework Class Library) 配图: (…...

jOOQ的使用场景
jOOQ的使用场景 jOOQ最初是作为一个库完全是JDBC和所有的数据库交互的抽象层而被创建。 在已有的软件产品中经常遇到的各种最佳实践被应用到这个库中。包含如下: 类型安全数据库对象引用,通过自动生成的模式, 表, 列,…...
Pytorch-Transformer轴承故障一维信号分类(三)
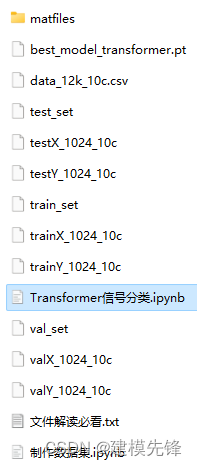
目录 前言 1 数据集制作与加载 1.1 导入数据 第一步,导入十分类数据 第二步,读取MAT文件驱动端数据 第三步,制作数据集 第四步,制作训练集和标签 1.2 数据加载,训练数据、测试数据分组,数据分batch…...
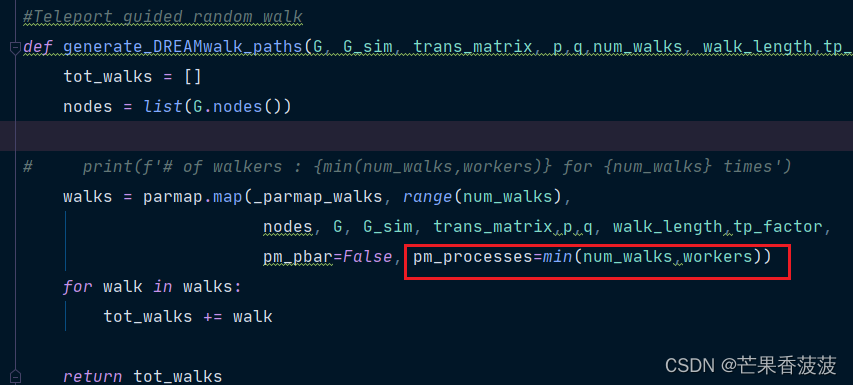
pycharm多线程报错的问题(未解决)
暂未解决! 看了一下可能是这里的问题: 根据建议,在walks之前加了 freeze_support() 但是没有效果。 关键是,在jupyter上运行是没有问题的! 未解决。...

【常用字符大全】含emoji表情
常用符号大全 ❤❥웃유♋☮✌☏☢☠✔☑♚▲♪✈✞↑↓◆◇⊙■□△▽─│♥❣♂♀☿Ⓐ✍✉☣☤✘☒♛▼♫⌘☪≈←→◈◎☉★☆⊿※¡━┃♡ღツ☼☁❅♒✎©™Σ✪✯☭➳卐√↖↗●◐Θ◤◥︻〖〗┄┆℃℉✿ϟ☃☂✄¢€£∞✫★✡↙↘○◑⊕◣◢︼【】┅┇…...

android 蓝牙开关设置
frameworks/base/packages/SettingsProvider/res/values/defaults.xml <bool name"def_bluetooth_on">false</bool>将 def_bluetooth_on 的值设为false(系统默认开启值) adb动态设置 关闭:adb shell settings put gl…...

C++ extern “C“ 用法
extern “C” 由于c中需要支持函数重载,所以c和c中对同一个函数经过编译后生成的函数名是不相同的 extern “C” 的主要作用就是为了实现c代码能够调用其他 c 语言代码。 1(不常用) //告诉编译器 show() 函数按c语言的方式进行编译和链接 extern "C" voi…...

HTML面试题---专题四
文章目录 一、前言二、如何在 HTML 中嵌入音频文件?三、解释 <script> 标签中 defer 属性的用途。四、如何在 HTML 中创建粘性/固定导航栏?五、HTML 中的 span 元素的用途是什么?六、如何使 HTML 元素可拖动?七、解释 <i…...
stm32项目(11)——基于stm32的俄罗斯方块游戏机
1.功能设计 使用stm32f103zet6平台,以及一块LCD屏幕,实现了一个俄罗斯方块游戏机。可以用按键调整方块的位置、还可以控制方块下降的速度! 2.视频演示 俄罗斯方块 3.俄罗斯方块发展史 俄罗斯方块是一种经典的拼图游戏,由苏联俄罗…...

【计算机网络基础2】IP地址和子网掩码
1、IP地址 网络地址 IP地址由网络号(包括子网号)和主机号组成,网络地址的主机号为全0,网络地址代表着整个网络。 广播地址 广播地址通常称为直接广播地址,是为了区分受限广播地址。 广播地址与网络地址的主机号正…...

ES6-import后是否有{}的区别
在ES6中,import语句用于导入其他模块中的变量、函数、类等。在使用import语句时,可以选择是否使用花括号{}来包裹导入的内容,这会影响导入的内容的使用方式。 1.使用花括号{}: 当使用花括号{}时,表示只导入指定的变量…...

rv1126-rv1109-以太网功能-eth-(原理篇)
这里只是浅浅分析一下 1.主控里面会内置mac 2.mac有组接口接到phy(网络芯片:8201) 3.phy(网络芯片:8201)接到网口 //这里就到达硬件的接口了,大致就是这个原理; 4.然后涉及到软件部分 就是mdio总线;这个总线是注册phy用的; 如果注册失败会导致网口无法使用 [ 1.002751] m…...

【IDEA】反向撤销操作快捷键 ctrl+shift+z 和搜狗热键冲突的解决办法
当我们执行某些操作时与搜狗热键冲突,直接取消搜狗的快捷键即可!!!以下以 ctrlshiftz 为例。 在输入悬浮框右键找到更多设置 按键里面找到系统功能快捷键设置 取消掉冲突的热键即可...
数据结构之----逻辑结构、物理结构
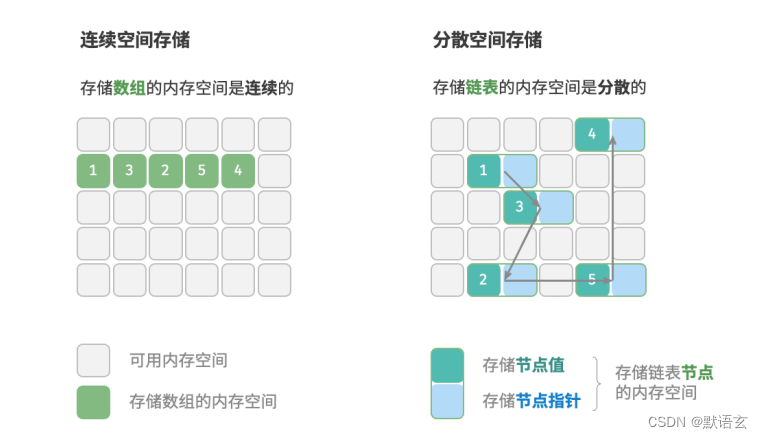
数据结构之----逻辑结构、物理结构 目前我们常见的数据结构分别有: 数组、链表、栈、队列、哈希表、树、堆、图 而它们可以从 逻辑结构和物理结构两个维度进行分类。 什么是逻辑结构? 逻辑结构是指数据元素之间的逻辑关系,而逻辑结构又分为…...

pip 通过git安装库
举例:安装peft库 git clone https://github.com/huggingface/peft.git cd peft python -m pip install . 解释: 使用git clone克隆PEFT库的代码。进入克隆的目录。使用python -m pip install .来安装PEFT库。 补充:使用pip安装到指定编译器…...

C语言——从终端输入 3 个数 a、b、c,按从大到小的顺序输出。
方式一 #include <stdio.h> int main() {int a, b, c, temp;printf("请输入三个数:\n");scanf("%d %d %d", &a, &b, &c);if (a < b) {temp a;a b;b temp;}if (a < c) {temp a;a c;c temp;}if (b < c) {temp…...
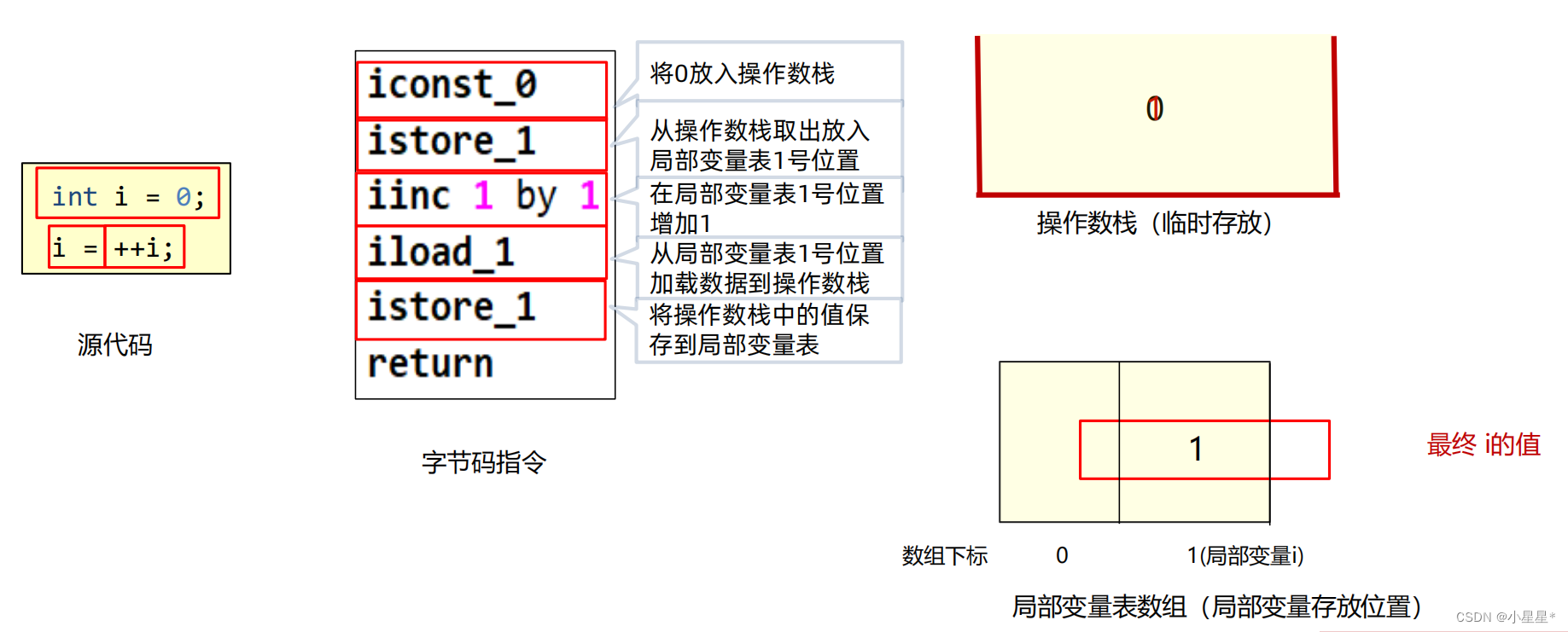
【JVM从入门到实战】(二)字节码文件的组成
一、Java虚拟机的组成 二、字节码文件的组成 字节码文件的组成 – 应用场景 字节码文件的组成部分-Magic魔数 什么是魔数? Java字节码文件中的魔数 文件是无法通过文件扩展名来确定文件类型的,文件扩展名可以随意修改,不影响文件的内容。…...

深度解析猫抓浏览器扩展资源嗅探机制与性能优化策略
深度解析猫抓浏览器扩展资源嗅探机制与性能优化策略 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓(Cat Catch)作为一…...

一文吃透Redis集群:架构、原理、搭建与实战优化
在分布式系统中,Redis作为高性能的键值存储中间件,单机部署早已无法满足高并发、大容量的业务需求——当数据量突破单机内存上限、QPS达到万级以上,单机Redis的单点故障、性能瓶颈会直接影响业务稳定性。此时,Redis集群࿰…...

CodeMirror边栏不止能显示行号:手把手教你打造代码调试器与个性化标记系统
CodeMirror边栏不止能显示行号:手把手教你打造代码调试器与个性化标记系统 在代码编辑器的演进历程中,边栏(Gutter)这个看似简单的区域,已经从单纯显示行号的辅助工具,进化为开发者与代码交互的重要界面。想…...

Godot PCK文件高效解包全攻略:从资源提取到实战应用
Godot PCK文件高效解包全攻略:从资源提取到实战应用 【免费下载链接】godot-unpacker godot .pck unpacker 项目地址: https://gitcode.com/gh_mirrors/go/godot-unpacker 作为游戏开发者或爱好者,你是否曾遇到过想要分析或复用Godot引擎打包的游…...

GB28181国标协议实战:用WVP+ZLMediaKit搭建一个支持级联的轻量级视频中台
GB28181国标协议实战:构建轻量级视频中台的架构设计与实现 在安防监控与视频管理领域,GB28181协议已经成为设备互联互通的事实标准。对于需要整合多品牌设备、实现统一管理的技术团队而言,如何快速搭建一个稳定可靠的视频中台是项目落地的关键…...

iOS高级开发工程师技术体系与民航行业实践深度解析
第一章 iOS开发技术核心体系 1.1 Swift与Objective-C双语言生态 现代iOS开发需要掌握两种核心语言的技术特点: // Swift类型安全示例 enum FlightStatus {case scheduled, departed, landed, canceled }var currentStatus: FlightStatus = .scheduled// 编译器会阻止非法状…...

G-Helper终极指南:华硕笔记本轻量级性能控制工具完全解析
G-Helper终极指南:华硕笔记本轻量级性能控制工具完全解析 【免费下载链接】g-helper Lightweight, open-source control tool for ASUS laptops and ROG Ally. Manage performance modes, fans, GPU, battery, and RGB lighting across Zephyrus, Flow, TUF, Strix,…...

5分钟掌握YetAnotherKeyDisplayer:专业按键可视化工具终极指南
5分钟掌握YetAnotherKeyDisplayer:专业按键可视化工具终极指南 【免费下载链接】YetAnotherKeyDisplayer The application for displaying pressed keys of the keyboard 项目地址: https://gitcode.com/gh_mirrors/ye/YetAnotherKeyDisplayer YetAnotherKey…...

Fastboot Enhance:高效Android刷机工具与Payload管理平台
Fastboot Enhance:高效Android刷机工具与Payload管理平台 【免费下载链接】FastbootEnhance A user-friendly Fastboot ToolBox & Payload Dumper for Windows 项目地址: https://gitcode.com/gh_mirrors/fa/FastbootEnhance 价值定位:重新定…...

Llama-3.2V-11B-cot算法解析实战:图解卷积神经网络核心原理
Llama-3.2V-11B-cot算法解析实战:图解卷积神经网络核心原理 你是不是经常听到“卷积神经网络”这个词,感觉它既神秘又强大,但一看到那些复杂的数学公式和网络结构图就头疼?别担心,今天咱们就换个方式,用大…...