光线追踪算法实现
我们已经涵盖了所有要说的内容! 我们现在准备编写第一个光线追踪器。 你现在应该能够猜测光线追踪算法是如何工作的。
首先,请花点时间注意一下,光在自然界中的传播只是从光源发出的无数光线,它们四处反弹,直到到达我们眼睛的表面。 因此,光线追踪非常优雅,因为它直接基于我们周围发生的事情。 除了它以相反的顺序遵循光路这一事实之外,它不亚于一个完美的自然模拟器。
NSDT工具推荐: Three.js AI纹理开发包 - YOLO合成数据生成器 - GLTF/GLB在线编辑 - 3D模型格式在线转换 - 可编程3D场景编辑器 - REVIT导出3D模型插件 - 3D模型语义搜索引擎
光线追踪算法获取由像素组成的图像。 对于图片中的每个像素,它都会向场景中发射主光线。 该主光线的方向是通过追踪从眼睛到该像素中心的线来获得的。 一旦我们设置了主光线的方向,我们就会检查场景中的每个对象,看看它是否与其中任何一个对象相交。 在某些情况下,主光线将与多个对象相交。 当发生这种情况时,我们选择交点最接近眼睛的对象。 然后,我们从交点向光源发射阴影光线(图 1):
图 1:我们通过像素中心发射主光线来检查可能的物体相交。 当我们找到一个点时,我们会投射阴影射线来确定该点是被照亮还是在阴影中
如果该光线在到达光源的途中未与物体相交,则命中点将被照亮。 如果它与另一个对象相交,该对象就会在其上投射阴影(图 2):
图 2:小球体在大球体上投射阴影。 阴影光线在到达光源之前与小球体相交
如果我们对每个像素重复此操作,就会获得三维场景的二维表示(图 3):

图 3:为了渲染帧,我们为帧缓冲区的每个像素发射主光线这是该算法的伪代码实现:
这是该算法的伪代码实现:
for (int j = 0; j < imageHeight; ++j) { for (int i = 0; i < imageWidth; ++i) { // compute primary ray directionRay primRay; computePrimRay(i, j, &primRay); // shoot prim ray in the scene and search for the intersectionPoint pHit; Normal nHit; float minDist = INFINITY; Object object = NULL; for (int k = 0; k < objects.size(); ++k) { if (Intersect(objects[k], primRay, &pHit, &nHit)) { float distance = Distance(eyePosition, pHit); if (distance < minDistance) { object = objects[k]; minDistance = distance; //update min distance } } } if (object != NULL) { // compute illuminationRay shadowRay; shadowRay.direction = lightPosition - pHit; bool isShadow = false; for (int k = 0; k < objects.size(); ++k) { if (Intersect(objects[k], shadowRay)) { isInShadow = true; break; } } } if (!isInShadow) pixels[i][j] = object->color * light.brightness; else pixels[i][j] = 0; }
} 正如我们所看到的,光线追踪的美妙之处在于它只需要几行代码即可; 一个人可以用 200 行写出一个基本的光线追踪器。 与其他算法(例如扫描线渲染器)不同,光线追踪只需很少的努力即可实现。
Arthur Appel 于 1969 年在一篇题为“实体着色机器渲染的一些技术”的论文中首次描述了这项技术。 那么,如果这个算法如此美妙,为什么它没有取代所有其他渲染算法呢? 当时(甚至在某种程度上,今天)主要原因是速度。 正如阿佩尔在他的论文中提到的:
这种方法非常耗时,通常需要比线框图多数千倍的计算时间才能获得有益的结果。 大约一半的时间用于确定投影和场景的点对点对应关系。
换句话说,它很慢(正如 Kajiya - 所有计算机图形学历史上最有影响力的研究人员之一 - 曾经说过:“光线追踪并不慢 - 计算机才是”)。 找到光线和几何体之间的交点非常耗时。 几十年来,算法的速度一直是光线追踪的主要缺点。 然而,随着计算机变得越来越快,这不再是一个问题。 尽管仍然必须说一件事:与其他技术(例如 z 缓冲区算法)相比,光线追踪仍然要慢得多。 然而,如今有了快速的计算机,我们可以在几分钟或更短的时间内计算出过去需要一小时的帧。 实时和交互式光线追踪器是一个热门话题。
总而言之,必须记住渲染例程可以被视为两个独立的进程。 第一个步骤确定对象表面的某个点从特定像素(可见性部分)是否可见,第二个步骤对该点进行着色(着色部分)。 不幸的是,这两个步骤都需要昂贵且耗时的射线几何相交测试。 该算法优雅而强大,但迫使我们以渲染时间换取准确性,反之亦然。 自从阿佩尔发表他的论文以来,人们已经进行了大量研究来加速射线与物体的相交例程。 随着计算机变得更加强大并与这些加速技术相结合,光线追踪变得可以在日常生产环境中使用,并且按照当今的标准,它是大多数(如果不是全部)渲染离线软件所使用的事实上的方法。 视频游戏引擎仍在使用光栅化算法。 然而,随着最近 GPU 加速光线追踪(2017-2018)和 RTX 技术的出现,实时光线追踪也已成为可能。 虽然一些视频游戏已经提供了可以打开光线追踪的模式,但它仅限于简单的效果,例如清晰的反射和阴影。
原文链接:光线追踪算法实现 - BimAnt
相关文章:
光线追踪算法实现
我们已经涵盖了所有要说的内容! 我们现在准备编写第一个光线追踪器。 你现在应该能够猜测光线追踪算法是如何工作的。 首先,请花点时间注意一下,光在自然界中的传播只是从光源发出的无数光线,它们四处反弹,直到到达我…...

学习深度强化学习---第3部分----RL蒙特卡罗相关算法
文章目录 3.1节 蒙特卡罗法简介3.2节 蒙特卡罗策略评估3.3节 蒙特卡罗强化学习3.4节 异策略蒙特卡罗法 本部分视频所在地址:深度强化学习的理论与实践 3.1节 蒙特卡罗法简介 在其他学科中的蒙特卡罗法是一种抽样的方法。 如果状态转移概率是已知的,则是…...

linux虚拟机使用81-persistent-net.rule后接口名依然改变的问题处理
测试环境:vmware workstation17 、oracle linux 7.8 1. 复位原有ifname 1)nmcli c s 查看管理的网卡 [rootrac2 ~]# nmcli c s NAME UUID TYPE DEVICE enp0s3 5b01a9de-9552-45da-a84a-1ae6c9506354…...

ARMV8 - A64 - 跳转和返回指令
说明 C语言等高级语言,根据是否需要返回到触发跳转代码的下一条代码,跳转有两种语句: 不需要返回,例如:if,goto,switch,while等语句。需要返回,例如:函数调…...

QX320F28335,自研内核指令集,主频150MHz,自研工具链,纯国产DSP,硬件兼容TMS320F28335
32位单核CPU 主频150MHz flash 1M SRAM 500KB 单精度浮点运算FPU 3个4M精度12位的ADC 12个ePWM 6个HRPWM(150ps)...
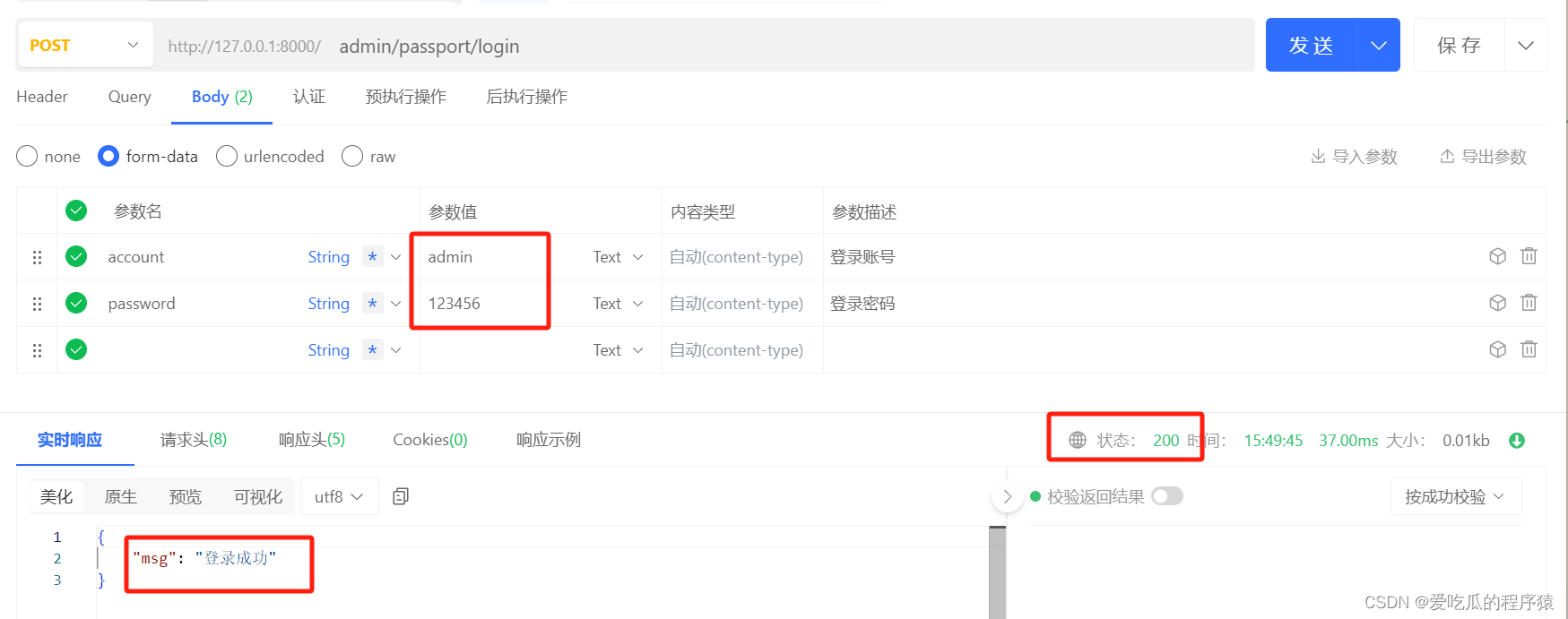
《使用ThinkPHP6开发项目》 - 登录接口一
《使用ThinkPHP6开发项目》 - 安装ThinkPHP框架-CSDN博客 《使用ThinkPHP6开发项目》 - 设置项目环境变量-CSDN博客 《使用ThinkPHP6开发项目》 - 项目使用多应用开发-CSDN博客 《使用ThinkPHP6开发项目》 - 创建应用-CSDN博客 《使用ThinkPHP6开发项目》 - 创建控制器-CSD…...

zabbix精简模板
一、监控项目介绍 linux自带得监控项目比较多,也不计较杂,很多监控项目用不到。所以这里要做一个比较精简得监控模版 二、监控模板克隆 1.搜索原模板 2.克隆模板 全克隆模板,这样就和原来原模板没有联系了,操作也不会影响原模…...
)
GO设计模式——14、代理模式(结构型)
目录 代理模式(Proxy Pattern) 代理模式的核心角色: 优缺点 使用场景 注意事项 代码实现 代理模式(Proxy Pattern) 代理模式(Proxy Pattern)通过引入代理对象来控制对真实对象的访问。 代…...
外贸SOHO建站怎么做?海洋建站方法策略?
外贸SOHO建站多少钱?外贸自助建站系统有哪些? 随着全球化的加速发展,外贸SOHO已经成为越来越多创业者的选择。然而,要想在竞争激烈的外贸市场中脱颖而出,一个专业的外贸网站是必不可少的。接下来海洋建站将探讨外贸SO…...
商城免费搭建之java鸿鹄云商 java电子商务商城 Spring Cloud+Spring Boot+mybatis+MQ+VR全景+b2b2c
鸿鹄云商 SAAS云产品概述 1. 涉及平台 平台管理、商家端(PC端、手机端)、买家平台(H5/公众号、小程序、APP端(IOS/Android)、微服务平台(业务服务) 2. 核心架构 Spring Cloud、Spring Boot、My…...

【淘宝网消费类电子产品销售数据可视化】
淘宝网消费类电子产品销售数据可视化 引言数据爬取与处理数据可视化系统功能1. 总数据量分析2. 店铺总数据3. 店铺销售额排名4. 不同电子商品销售价格5. 单个商品价格排名6. 不同省份平均销量7. 不同地区的平均销售额8. 省份数量9. 每个省份有用的平均个数 创新点结语 引言 随…...

AI编译器及TVM概述
AI编译器 AI编译器有许多不同的类型和品牌,以下是一些常见的AI编译器: TensorFlow:谷歌开发的深度学习框架,它包含了一个用于优化和编译TensorFlow模型的编译器。 PyTorch:一个基于Python的开源深度学习框架…...
排序-归并排序与计数排序
文章目录 一、归并排序1、概念2、过程3、代码实现4、复杂度5、稳定性 二、 计数排序1、思路2、代码实现3、复杂度:4、稳定性 一、归并排序 1、概念 是建立在归并操作上的一种有效,稳定的排序算法,该算法是采用分治法(Divide and Conquer)的一个非常典型的应用。将已…...
国产数据库适配-人大金仓(kingbase V8R3)
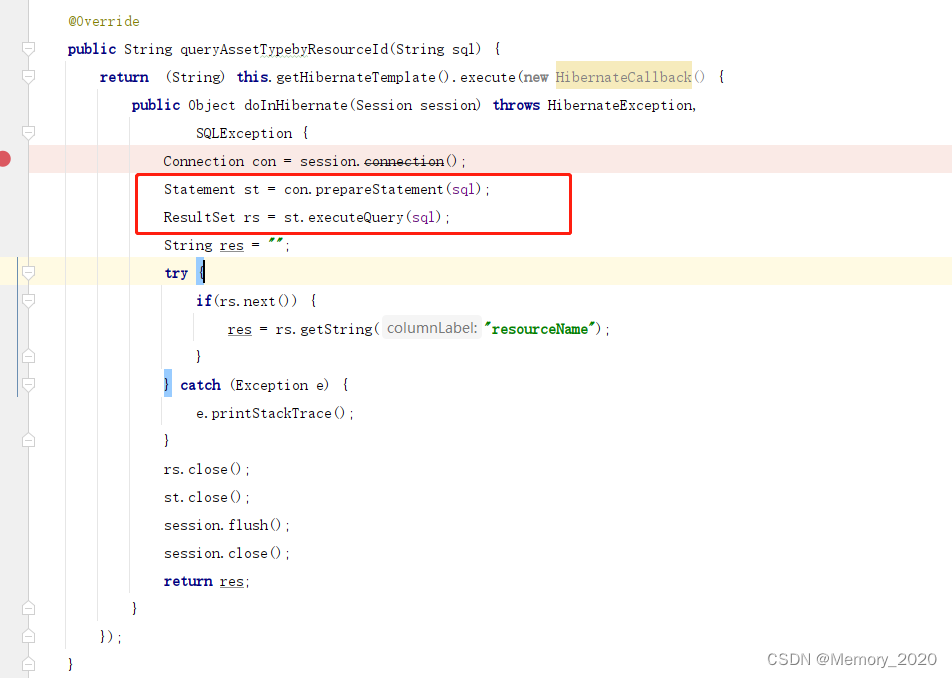
金仓数据库是基于POSTGRE_SQL 参考资料 国产数据库人大金仓踩坑记录和函数适配_金仓数据库关系不存在-CSDN博客 Springboot工程 适配人大金仓 kingbase V8R3 引入驱动包和方言包 hibernate-5.2.17.Finaldialect.jar kingbase8-8.2.0.jar application.yml文件 driver-cla…...
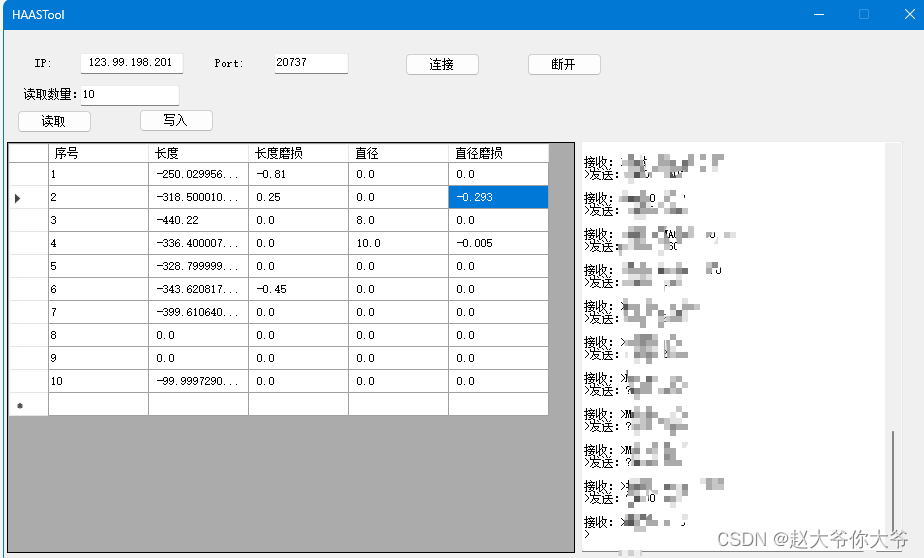
HAAS 哈斯机床 读写刀补数据
哈斯机床不管是串口机床还是网口机床 都提供了Q命令 可以使用Q命令 进行刀具补偿的读取和写入 最多支持200把刀的 读取和写入...
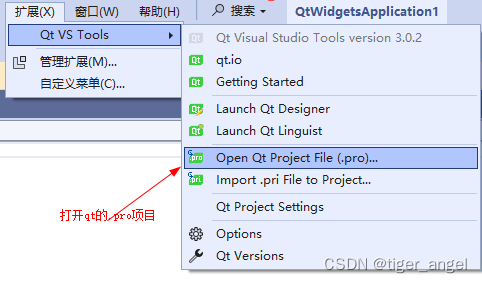
Visual studio+Qt开发环境搭建以及注意事项和打开qt的.pro项目
下载qt-然后安装5.14.2_msvc2017 不知道安装那个就全选5.14.2的父级按钮 https://download.qt.io/archive/qt/5.14/5.14.2/ 安装Visual studio,下载直接下一步就行 配置Visual studio的qt环境 在线安装-重启Visual studio会自动安装 离线安装-关闭Visual studio点击安装 关闭…...
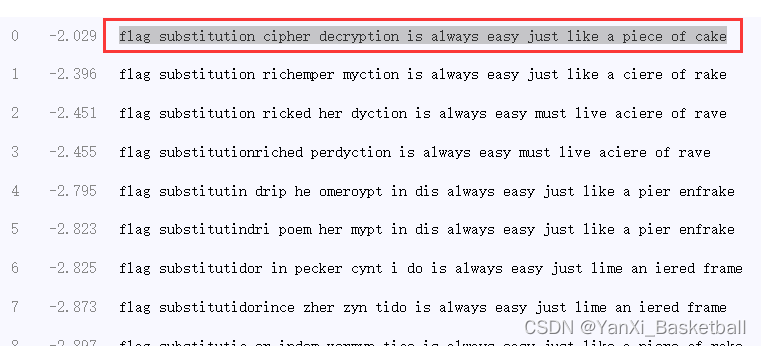
BUUCTF crypto做题记录(4)新手向
目录 一、大帝的密码武器 二、Windows系统密码 三、信息化时代的步伐 四、凯撒?替换?呵呵! 一、大帝的密码武器 下载的文件叫zip,应该是提示文件的后缀名是zip,把名字改成1.zip或者其他也行,主要保证后缀名是zip就…...
案例教程)
【ArcGIS微课1000例】0080:ArcGIS将shp转json(geojson)案例教程
本文以案例的形式,讲述在ArcGIS软件中,将矢量数据转为GeoJSON的方法。 扩展阅读:【GIS风暴】GeoJSON数据格式案例全解 文章目录 一、GeoJson简介二、ArcGIS将矢量数据转为GeoJSON一、GeoJson简介 GeoJSON是一种基于JSON的地理空间数据交换格式,它定义了几种类型JSON对象以…...

阿里云Centos8安装Dockers详细过程
一、卸载旧版本 较旧的 Docker 版本称为 docker 或 docker-engine 。如果已安装这些程序,请卸载它们以及相关的依赖项。 yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \do…...

leetcode 二数之和 三数之和 四数之和
leetcode 二数之和 三数之和 四数之和 又到了不想写博客的环节,不想归不想,有些事情还是要做的,今天总结的是多数之和的问题。 二数之和 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target …...
)
新手也能看懂的TCAD入门:用Sentaurus和Silvaco分别跑一个NPN三极管(附完整代码)
TCAD新手实战指南:从零开始仿真NPN三极管 1. 初识TCAD:半导体仿真的利器 在微电子领域,TCAD(Technology Computer-Aided Design)工具如同设计师的"数字实验室",让我们能在计算机上模拟半导体器件…...

从零到一:Android Studio集成Uniapp离线SDK打包实战
1. 环境准备:工具选择与版本匹配 第一次接触Uniapp离线打包时,最让我头疼的就是工具版本匹配问题。记得去年接手一个混合开发项目时,因为HBuilderX和SDK版本不兼容,整整浪费了两天时间排查问题。为了避免大家重蹈覆辙,…...

3步实现专业级AI换脸:roop-unleashed创新方案指南
3步实现专业级AI换脸:roop-unleashed创新方案指南 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 在数字创意飞速发展的今天,AI换脸…...

Go语言静态站点生成器Zeuxis:极简架构与高性能构建实践
1. 项目概述:一个轻量级、高性能的静态站点生成器最近在折腾个人博客和文档站点,发现市面上的静态站点生成器虽然多,但要么配置复杂、学习曲线陡峭,要么过于臃肿,启动和构建速度慢得让人抓狂。直到我遇到了bnomei/zeux…...

多维子集和问题:NP难问题的算法与应用解析
1. 多维子集和问题概述多维子集和问题(Multi-dimensional Subset Sum Problem)是计算复杂度理论中的经典NP难问题。简单来说,它要求在给定的n维向量集合中,找出一个子集,使得该子集中所有向量在每一维上的和恰好等于目标向量对应的分量。这个…...

结构化数字工作空间:提升创意工作效率的目录设计与自动化实践
1. 项目概述:一个为创意工作者量身定制的数字工作空间 如果你是一名设计师、开发者、内容创作者,或者任何需要处理大量数字资产、管理复杂项目流程的创意工作者,那么“Workspace-di-Yivo”这个名字可能会让你眼前一亮。这不仅仅是一个简单的文…...

Arm Neoverse CMN-700多芯片架构与一致性哈希解析
1. Arm Neoverse CMN-700多芯片架构解析在现代高性能计算领域,多芯片系统架构已成为突破单芯片性能瓶颈的关键技术路径。Arm Neoverse CMN-700作为第二代一致性网状网络控制器,其设计哲学体现在三个维度:首先是通过模块化设计实现计算单元的可…...

量化部署终极指南:从GPTQ到AWQ,精度损失与显存节省的平衡艺术
系列导读 你现在看到的是《本地大模型私有化部署与优化:从入门到生产级实战》的第 7/10 篇,当前这篇会重点解决:帮你搞懂每种量化方法的优劣,用最少显存跑最大模型,精度损失可控。 上一篇回顾:第 6 篇《RAG知识库实战:LangChain+Chroma搭建本地问答系统,解决幻觉与知…...

会话管理封装实践:构建安全可扩展的分布式会话系统
1. 项目概述:一个被低估的会话管理利器如果你是一名开发者,尤其是经常需要处理用户登录、权限校验、状态保持这类“脏活累活”的后端或全栈开发者,那么你一定对“会话管理”这四个字又爱又恨。爱的是,它是构建安全、有状态应用的基…...

汽车该多久换一代
汽车该多久换一代 买车的人其实不怕四年换代,怕的是刚提车半年就被新款打成旧款。李想这句话能引起讨论,原因也在这里:车企说的是研发验证周期,车主感受到的是价格、配置和二手残值。 汽车确实没法完全照着手机节奏跑。手机坏了可…...