PCL 点云匹配 之NICP(Normal ICP)
一、概述
上面一篇中我们已经得出了一个结论,就是ICP虽然简单,但是也有明显的缺点
1、计算速度慢,收敛慢,迭代次数多
2、对内存的开销比较大
3、很容易陷入局部最优的困局
因此我们在经典ICP的基础上添加一两个约束:
第一个约束就是添加法向量,计算当前点R半斤内的法向量,算法向量的夹角
第二个约束就是添加曲率,添加曲率
这样我们就可以减少迭代的次数,加速收敛。
二、计算点云的法向量和曲率
原理:
找到当前点pi的r 半斤类的所有的点V,然后计算出当前点集V的均值ui,然后开始计算V到的协方差

由于协方差的对称性,我们可以对这个矩阵进行SVD矩阵分解

曲率:
是按照从小到大的顺序排列的,那么曲率可以计算:
,并且
越小表示当前点云半斤内越平坦
最小的特征值对应的就是法向量的方向。
数学技巧篇69:特征值、特征向量的求法与证明 - 知乎
法向量
求解最小特征值的特征向量即为法向量

法向量的定向
从上面我们可以计算出法向量,那么法向量如何定向呢,也就是说一条直线你规定那个方向为正方向呢???
可以用视点Vp *Ni(当前点的法向量) >0 为正 等
PCL中的法向量定向
已知视点Vp ,对于任意的半径内的点坐标Pi 以及其对应的法向量ni,其定向如下:

flipNormalTowardsViewpoint (const PointT &point, float vp_x, float vp_y, float vp_z, Eigen::Vector4f &normal);
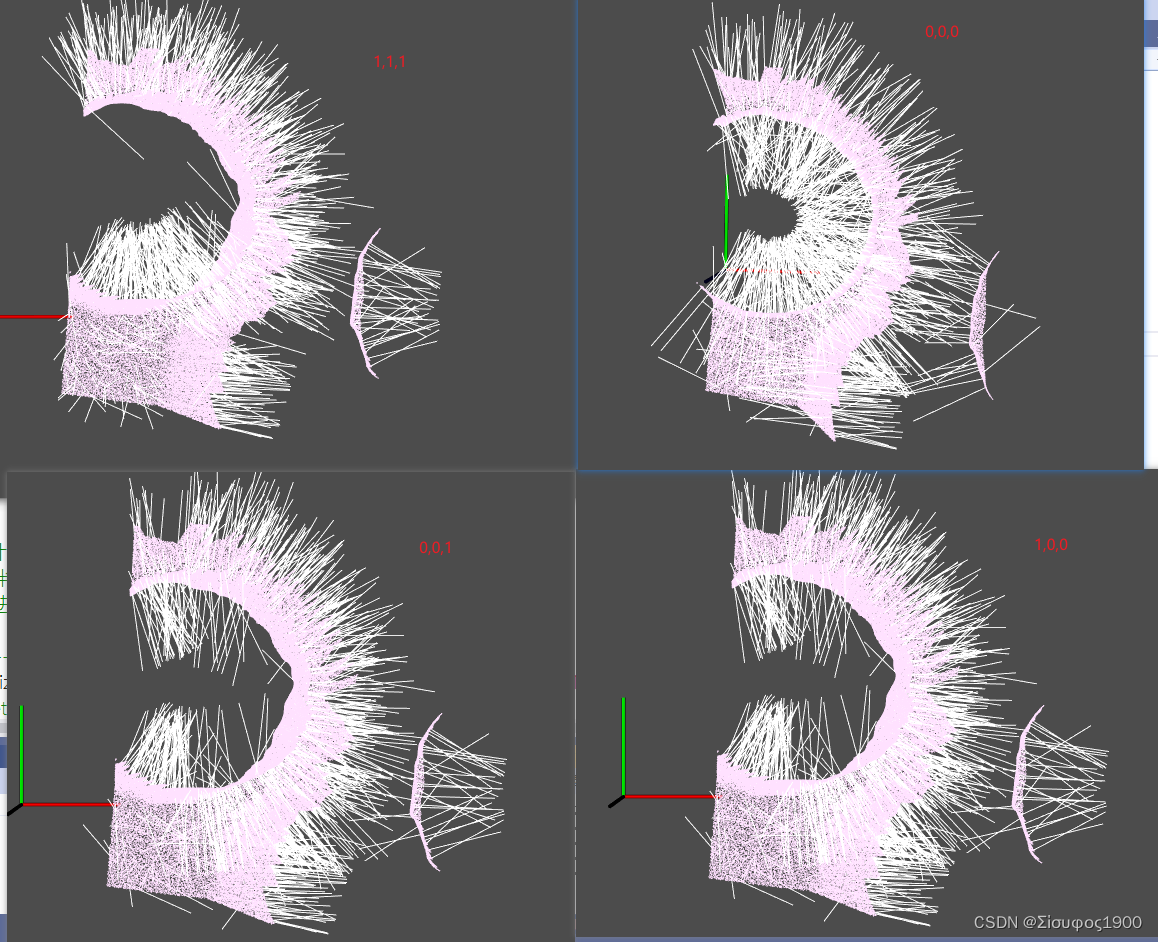
法向量方向测试

比较如下
code
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
//#include <pcl/features/normal_3d.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#include "vtkAutoInit.h"
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
VTK_MODULE_INIT(vtkRenderingFreeType)#if 1int main()
{//------------------加载点云数据-------------------//C:\Users\Albert\Desktop\halcon_to_pcl\normal\normaltest2.pcdpcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ>("C:\\Users\\Albert\\Desktop\\halcon_to_pcl\\classfiy\\0.pcd", *cloud) == -1){// 找不到点云文件return -1;}//------------------计算法线----------------------pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> n;//OMP加速pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);//建立kdtree来进行近邻点集搜索pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());n.setNumberOfThreads(10);//设置openMP的线程数 我一般是10条就够了// 主要是改变这个值来看看点云的法向量的方向变换n.setViewPoint(1,1,1);//设置视点,默认为(0,0,0)n.setInputCloud(cloud);n.setSearchMethod(tree);n.setKSearch(10);//点云法向计算时,需要所搜的近邻点大小//n.setRadiusSearch(0.03);//半径搜素n.compute(*normals);//开始进行法向计//----------------可视化--------------boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Normal viewer"));//viewer->initCameraParameters();//设置照相机参数,使用户从默认的角度和方向观察点云//设置背景颜色viewer->setBackgroundColor(0.3, 0.3, 0.3);viewer->addText("Normal", 10, 10, "text");//设置点云颜色pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 255, 225,255);//添加坐标系viewer->addCoordinateSystem(0.1);viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "sample cloud");//添加需要显示的点云法向。cloud为原始点云模型,normal为法向信息,10表示需要显示法向的点云间隔,即每10个点显示一次法向,0.1表示法向长度。viewer->addPointCloudNormals<pcl::PointXYZ, pcl::Normal>(cloud, normals, 100, 0.03, "normals");//设置点云大小viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");while (!viewer->wasStopped()){viewer->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(100000));}return 0;}#endif 四、算法原理
五、算法流程
相关文章:
PCL 点云匹配 之NICP(Normal ICP)
一、概述 上面一篇中我们已经得出了一个结论,就是ICP虽然简单,但是也有明显的缺点 1、计算速度慢,收敛慢,迭代次数多 2、对内存的开销比较大 3、很容易陷入局部最优的困局 因此我们在经典ICP的基础上添加一两个约束: 第…...

华脉智联融合通信一张图
随着通信技术、信息技术以及互联网的发展,融合通信技术也日益发展成熟。融合通信系统作为常见的通信指挥调度系统,其发挥的功能也越来越强大,在不同行业中的应用也越来越丰富。 华脉智联深耕融合通信行业多年,自主研发的融合通信…...

Flink系列之:窗口Top-N
Flink系列之:窗口Top-N 一、窗口Top-N二、示例:在窗口聚合后进行窗口 Top-N三、在窗口表值函数后进行窗口 Top-N四、限制 一、窗口Top-N 适用于流、批一体窗口 Top-N 是特殊的 Top-N,它返回每个分区键的每个窗口的N个最小或最大值。与普通To…...
)
【k8s】--insecure-registry详解 ( 访问仓库、https、http)
文章目录 一、--insecure-registry是什么二、如何使用--insecure-registry三、--insecure-registry的安全风险四、--insecure-registry的替代方案五、总结参考 一、–insecure-registry是什么 --insecure-registry是docker中用来设置与docker registry通信的安全限制的一个参数…...

ElementUI,修改el-cascader的默认样式
Element UI 中的下拉弹窗是通过在整个body标签末尾动态添加div实现的,所以修改样式时,必须要定义全局样式才能实现样式覆盖,那怎样才能避免全局的样式污染呢? 解决办法:通过给组件添加自定义的 popper-class 属性来避…...

外卖系统海外版:代码与美食的完美交融
在数字化时代,外卖系统海外版正引领着全球美食点餐的新潮流。不仅为用户提供了便捷的用餐服务,更通过技术创新为美食与代码之间搭建了一座桥梁。本文将探讨其中的一些技术应用,并呈现与美食完美交融的全新体验。 多语言支持代码示例 def m…...
Java代码解析:初学者的编程入门指南
💂 个人网站:【 海拥】【神级代码资源网站】【办公神器】🤟 基于Web端打造的:👉轻量化工具创作平台💅 想寻找共同学习交流的小伙伴,请点击【全栈技术交流群】 Java作为一门强大而广泛应用的编程语言&#x…...
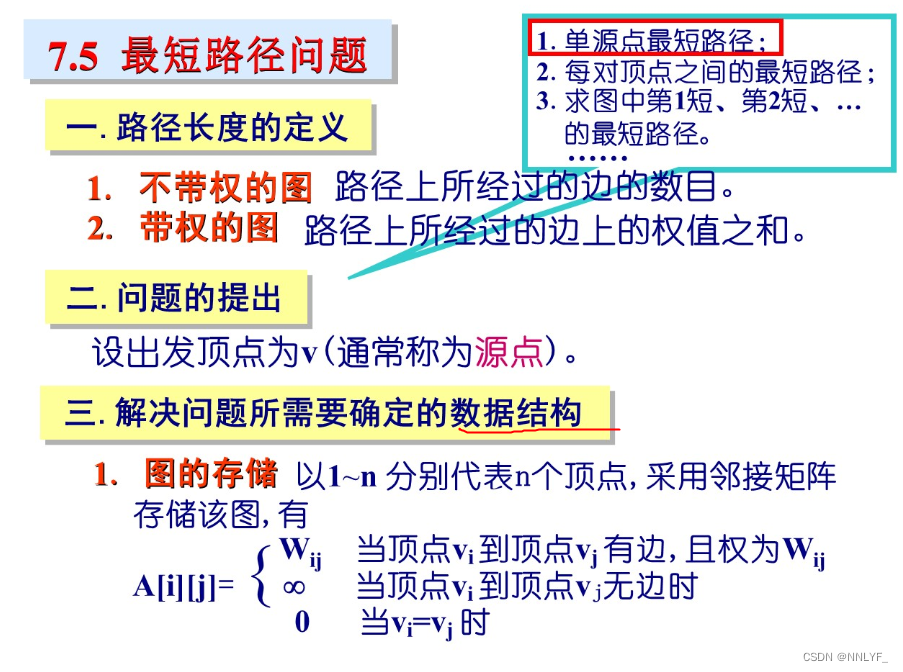
数据结构--图
树具有灵活性,并且存在许多不同的树的应用,但是就树本身而言有一定的局限性,树只能表示层次关系,比如父子关系。而其他的比如兄弟关系只能够间接表示。 推广--- 图 图形结构中,数据元素之间的关系是任意的。 一、图…...

AXure的情景交互
目录 导语: 1.erp多样性登录界面 2.主页跳转 3.省级联动编辑 4. 下拉加载 导语: Axure是一种流行的原型设计工具,可以用来创建网站和应用程序的交互原型。通过Axure,设计师可以创建情景交互,以展示用户与系统的交…...

数据库操作习题12.12
考虑如下的人员数据,其中加下划线的是主码,数据库模式由四个关系组成: employee (empname, street, city) works (empname, compname, salary) company(id, compname, city) managers (empname, mgrname) 其中 关系 employee 给出人员的基本信息,包括人员…...

Redis之INCR命令,通常用于统计网站访问量,文章访问量,分布式锁
前言 Redis的INCR命令用于将键的值增加1。如果键不存在,则会先将键的值设置为0,然后再执行INCR操作。INCR命令的作用是对计数器进行自增操作,可以用于实现多种场景,比如统计网站访问量、文章访问量、分布式锁等。 一、Redis键之…...

window运行celery报错
报错信息 Traceback (most recent call last): File "c:\program files\python36\lib\site-packages\billiard\pool.py", line 359, in workloop result (True, prepare_result(fun(*args, **kwargs))) File "c:\program files\python36\lib\site-packages\ce…...

玩转Docker(五):网络
文章目录 〇、关于linux系统网络一、none网络二、host网络三、bridge网络一个问题:为什么在主机上仍可以通过localhost:port访问到容器中的服务? 四、user-defined网络 Docker安装时会自动在host上创建三个网络,我们可用docker network ls命令…...
选择合适教育管理软件:必须考虑的10个关键问题
随着教育行业的迅速数字化,学校要能够提供最新的管理和教育方法。大家逐渐意识到技术让运营变得更容易、更有效率。 不过首先我们需要找到一个能满足需求的应用程序。面对众多的选择,你该如何选择一个合适的平台呢?当然,没有人想…...

前端不同架构的分层设计
1. 架构设计分层: (1). 系统架构: ①. 应用场景:a. 应用在整个系统内,如与后台服务如何通信,与第三方系统如何集成.②. 前提条件:a. 了解前端系统与其它系统间的关系,包括业务关系和协作机制.b. 了解后端系统,需要规定与后台数据传递的机制,包括:(1). api设计规范(2). 访问授…...

android系统镜像文件
boot.img:这是包含内核和设备树(Device Tree)的镜像文件。它被引导加载程序(bootloader)加载以启动系统,并负责将控制权转交给内核。 dtbo.img:这是设备树增量编译(Device Tree Ove…...
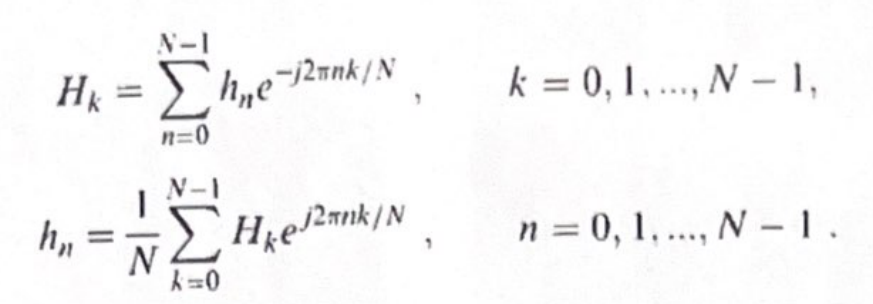
相位的重要性
在过去的几年中,相干信号和图像处理尖端技术的开发和应用有了显著的增长。相干处理的特点是使用一个称为相位的单一量[1]。相比之下,非相干处理只利用信号幅度或强度。需要进行相干处理的例子包括合成孔径雷达(SAR)、合成孔径声纳…...
补充Python经典面试题(吸收高级编程特性))
(三十三)补充Python经典面试题(吸收高级编程特性)
第一题: def func(a, b[]): pass一、上题讲解: 这个函数定义有一个默认参数b,它的默认值是一个空列表[]。这道面试题涉及到Python中函数参数默认值的一些重要概念和陷阱。 首先,当你调用这个函数时,如果不传递参数b…...

SQL进阶理论篇(四):索引的结构原理(B树与B+树)
文章目录 简介如何评价索引的数据结构设计好坏二叉树的局限性什么是B树什么是B树总结参考文献 简介 我们在上一节中说过,索引其实是一种数据结构,那它到底是一种什么样的数据结构呢?本节将简单介绍一下几个问题: 什么样的数据结…...
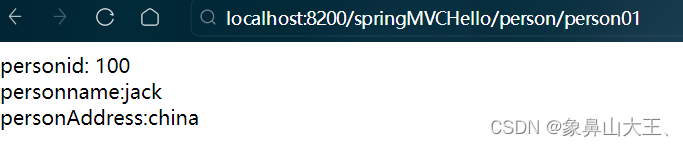
springMVC-模型数据的处理
一、数据放入到request域当中 1、把获取的数据放入request域中, 方便在跳转页面去显示 <a>添加主人信息</a> <form action"vote/vote04" method"post" >主人id:<input type"text" name"id&q…...

腾讯文档协作全攻略:从权限设置到区域锁定,团队办公效率翻倍
腾讯文档团队协作高阶指南:权限控制与区域锁定的艺术 在数字化办公时代,团队协作的效率往往决定了项目的成败。作为国内领先的在线协作文档工具,腾讯文档凭借其流畅的实时协作体验和丰富的权限管理功能,已经成为众多团队的首选工具…...

嵌入式AI新篇章:Qwen3-ASR-0.6B在边缘计算设备上的部署与优化
嵌入式AI新篇章:Qwen3-ASR-0.6B在边缘计算设备上的部署与优化 1. 引言:当语音识别遇见边缘计算 想象一下,你对着一个巴掌大的智能音箱说话,它几乎在你话音落下的瞬间就理解了你的意思,并且完全不需要连接云端。或者&…...

ReplaceItems.jsx:基于智能匹配引擎的Illustrator对象替换解决方案
ReplaceItems.jsx:基于智能匹配引擎的Illustrator对象替换解决方案 【免费下载链接】illustrator-scripts Adobe Illustrator scripts 项目地址: https://gitcode.com/gh_mirrors/il/illustrator-scripts 副标题:面向专业设计师的批量元素管理工具…...

轻量锐驰 x 轻量对象存储:构建个人专属高速云存储方案
1. 为什么你需要自建云存储? 每次用公共网盘传文件都像在参加龟速比赛?分享给朋友时对方总抱怨下载慢如蜗牛?我三年前就开始研究自建云存储方案,实测下来轻量锐驰服务器轻量对象存储的组合,速度能跑满家庭宽带上限&…...

SPM12实战:从nii文件元数据解析到精准slice timing配置
1. 理解nii文件与slice timing的基础概念 当你第一次拿到fMRI的nii格式数据时,可能会被这个黑箱般的文件格式搞得一头雾水。nii文件就像是把整个大脑扫描过程打包成一个数字包裹,里面不仅包含三维的脑部图像数据,还隐藏着关键的扫描参数。我在…...

工业视觉检测避坑指南:CogBlobTool阈值设置5大常见错误及解决方案
工业视觉检测避坑指南:CogBlobTool阈值设置5大常见错误及解决方案 在工业视觉检测领域,斑点检测(Blob Analysis)是最基础也最关键的环节之一。作为Cognex VisionPro套件中的核心工具,CogBlobTool凭借其强大的图像分割能…...

开源字体实用指南:Poppins字体家族的全方位应用策略
开源字体实用指南:Poppins字体家族的全方位应用策略 【免费下载链接】Poppins Poppins, a Devanagari Latin family for Google Fonts. 项目地址: https://gitcode.com/gh_mirrors/po/Poppins 价值定位:如何让开源字体成为项目的视觉资产&#x…...

Phi-3-mini-4k-instruct-gguf GPU利用率优化:CUDA核心占用率与吞吐量分析
Phi-3-mini-4k-instruct-gguf GPU利用率优化:CUDA核心占用率与吞吐量分析 1. 模型概述与性能挑战 Phi-3-mini-4k-instruct-gguf是微软推出的轻量级文本生成模型,基于GGUF格式优化,特别适合问答、文本改写和摘要生成等场景。虽然模型体积小巧…...

AIVideo一站式AI长视频工具与Visual Studio的深度集成开发
AIVideo一站式AI长视频工具与Visual Studio的深度集成开发 1. 引言 作为一名长期使用Visual Studio进行开发的程序员,我经常遇到这样的痛点:想要录制一段代码演示视频,需要反复切换多个软件;想要制作项目介绍视频,得…...

魔兽争霸3帧率优化与性能调优指南:从卡顿到高流畅度的开源解决方案
魔兽争霸3帧率优化与性能调优指南:从卡顿到高流畅度的开源解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 在现代硬件环境下运行经…...