智能化中的控制与自动化中的控制不同
智能化中的控制相对于自动化中的控制更加灵活、智能、综合和学习能力强。智能化控制系统能够根据实际情况进行自主决策和优化,适用范围更广,效果更好。
首先,智能化控制系统能够根据外部环境的变化和实时数据的反馈来自主调整和优化控制策略,以实现更高效、更精确的控制;而自动化系统通常是基于固定的控制策略和预设的参数来执行控制操作。其次,智能化控制系统可以整合多种传感器和信息来源,能够监测和分析多种类型的数据,并根据数据之间的关联性进行综合判断和决策;而自动化系统通常只能处理特定类型的数据和信息,通常是局限于特定的任务和领域;此外,智能化中的控制常常涉及到人工智能和机器学习等领域的技术应用,通过统计学习和概率适应的方式不断提高自身的性能和效果,能够自主学习和优化控制策略,而自动化控制系统通常是基于预设的规则和算法执行控制操作,无法进行自主学习和优化。智能化过程中的控制更广泛应用于复杂系统的控制和优化,如智能制造、无人驾驶、智能交通等,而自动化过程中的控制更多应用于工业自动化、生产线控制等领域。
智能化过程中的正、负反馈机制与自动化过程中的正、负反馈机制在范围、处理能力、可调性、人类干预需求和目标导向等方面存在差异,但它们都共同具备反馈机制、目标导向、自动化特性和提高效率的特点。具体如下:
智能化过程中的正、负反馈机制与自动化过程中的正、负反馈机制有以下的不同之处:
1、范围广度:智能化过程中的正、负反馈机制可以更复杂和多样化,涵盖更广泛的领域和应用,而自动化过程通常更为简单和专一。
2、处理能力:智能化过程中的正、负反馈机制通常需要更高级的算法和技术支持,能够处理更复杂的信息和问题,而自动化过程中的正、负反馈机制通常更简单,面对更明确的指令或条件。
3、可调性:智能化过程中的正、负反馈机制通常可以根据不同的情况和需求进行调整和优化,具有更好的灵活性和适应性。而自动化过程中的正、负反馈机制通常是确定性的,缺乏自适应能力。
4、对人类干预的需求:智能化过程中的正、负反馈机制通常需要人类的参与和决策,因为人类的经验和知识对于解决复杂问题和未知情况至关重要。自动化过程中的正、负反馈机制则更加独立,减少人类的干预。
5、目标和效果:智能化过程中的正、负反馈机制通常更加注重整体的系统性能和目标的优化,致力于实现更高层次的目标。自动化过程中的正、负反馈机制则更注重局部的执行和结果的达成。
智能化过程中的正、负反馈机制与自动化过程中的正、负反馈机制有以下的共同之处:
1、反馈机制:智能化过程和自动化过程都依赖于正、负反馈机制来实现控制和调整。
2、目标导向:智能化过程和自动化过程都是为了实现特定的目标或执行特定的任务,通过正、负反馈机制来指导和调整行动。
3、自动化特性:智能化过程和自动化过程都倾向于减少人工操作和干预,通过正、负反馈机制来实现自动化。
4、提高效率:智能化过程和自动化过程都追求提高效率和减少错误,通过正、负反馈机制来监测和调整系统的运行。
下面这个例子可以简单地说明智能化控制与自动化控制不同之处:
假设有一个智能家居系统,可以通过手机应用控制家中的灯光和温度。在自动化控制中,可以设置一个定时器,根据预设的时间自动打开或关闭灯光和调整温度。这是一种相对简单的自动化控制,通过预设的规则来控制设备,不需要实时的感知环境和用户需求。而在智能化控制中,系统可以通过传感器获取环境信息,比如光线强度、室内温度等,同时也可以通过用户的语音或手势指令获取用户需求,根据这些信息,智能家居系统可以智能地调节灯光亮度和温度,实现个性化的控制,当用户进入房间时,系统可以自动感知用户的到来,根据用户的偏好自动打开合适的灯光和调整温度;或者当系统感知到室内温度过高时,可以自动开启空调来调节温度。总之,智能化中的控制是更加智能和灵活的,它可以根据感知到的环境和用户需求实时调整控制策略,提供更加个性化和智能化的服务。而自动化中的控制则是通过预设的规则和定时器来控制设备,较为固定和简单。
从上述例子中,我们不难看出:在自动化过程中,目标通常固定,并且机器自动地根据预设条件执行任务,反馈通常基于预设的传感器和控制器,用来检测执行任务时系统的状态和性能;决策通常是基于预设的规则和算法,并且很少会参考环境和上下文信息;通常缺乏自适应能力,一旦遇到未知的情况或者环境变化,可能会产生错误的结果。而在智能化过程中,目标可以是可变的,并且智能系统可以根据环境变化和学习经验来重新设定目标;反馈信息不仅可以来自传感器和控制器,还可以来自其他智能系统、用户反馈和社交媒体等多个渠道;决策可以基于机器学习和人工智能技术,利用大量的数据和上下文信息,从而更加智能地适应变化的环境;具有较强的自适应能力,可以根据反馈信息和学习算法动态调整策略,以适应不同的情况和需求。总的来说,智能化过程相比自动化过程更加灵活、智能和自适应,能更好地应对复杂和不确定的环境。
相关文章:
智能化中的控制与自动化中的控制不同
智能化中的控制相对于自动化中的控制更加灵活、智能、综合和学习能力强。智能化控制系统能够根据实际情况进行自主决策和优化,适用范围更广,效果更好。 首先,智能化控制系统能够根据外部环境的变化和实时数据的反馈来自主调整和优化控制策略&…...

java练习题之多态练习
1:关于多态描述错误的是(D) A. 父类型的引用指向不同的子类对象 B. 用引用调用方法,只能调用引用中声明的方法 C. 如果子类覆盖了父类中方法,则调用子类覆盖后的方法 D. 子类对象类型会随着引用类型的改变而改变 2:class Supe…...
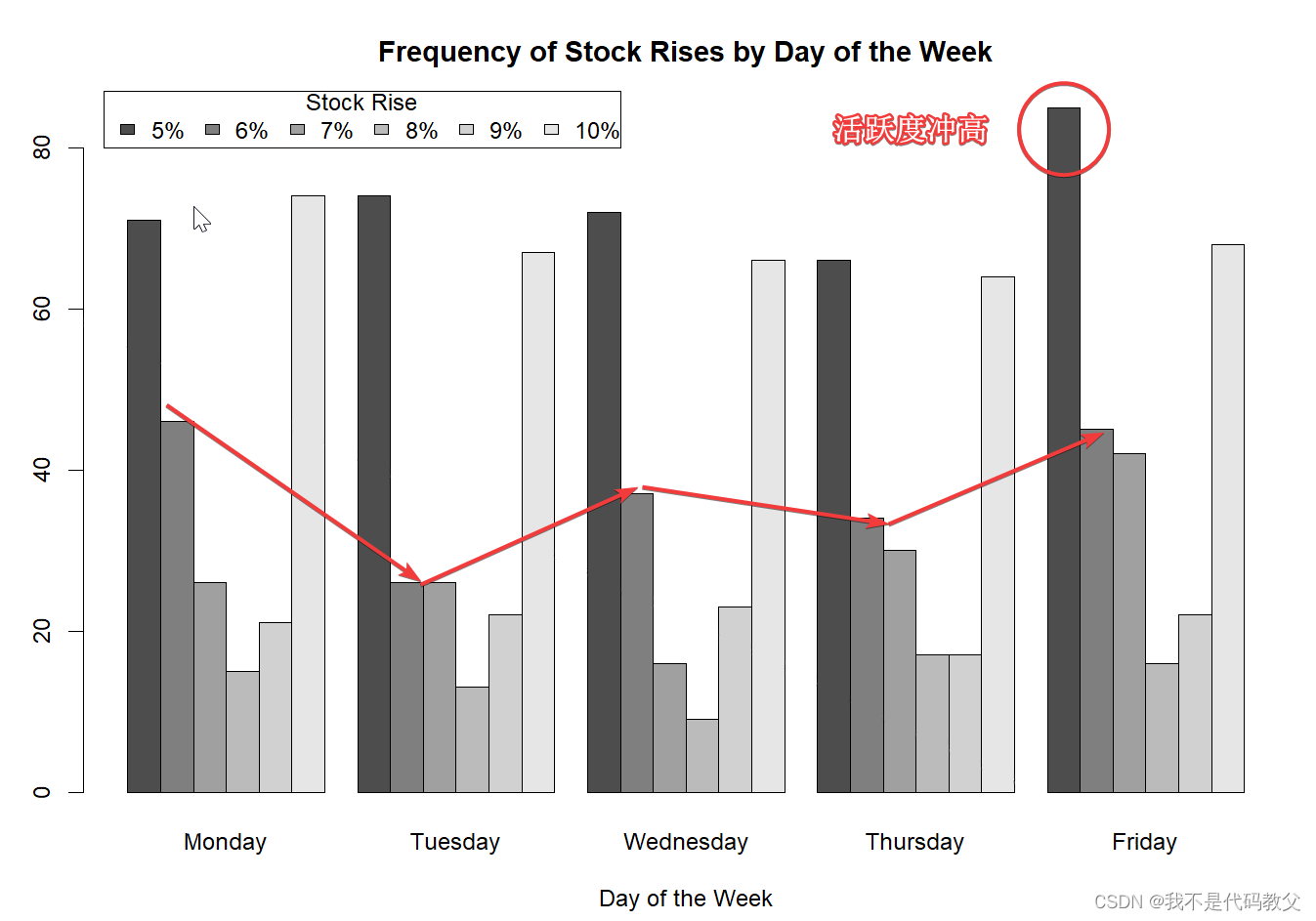
[原创][R语言]股票分析实战[4]:周级别涨幅趋势的相关性
[简介] 常用网名: 猪头三 出生日期: 1981.XX.XX QQ联系: 643439947 个人网站: 80x86汇编小站 https://www.x86asm.org 编程生涯: 2001年~至今[共22年] 职业生涯: 20年 开发语言: C/C、80x86ASM、PHP、Perl、Objective-C、Object Pascal、C#、Python 开发工具: Visual Studio、D…...
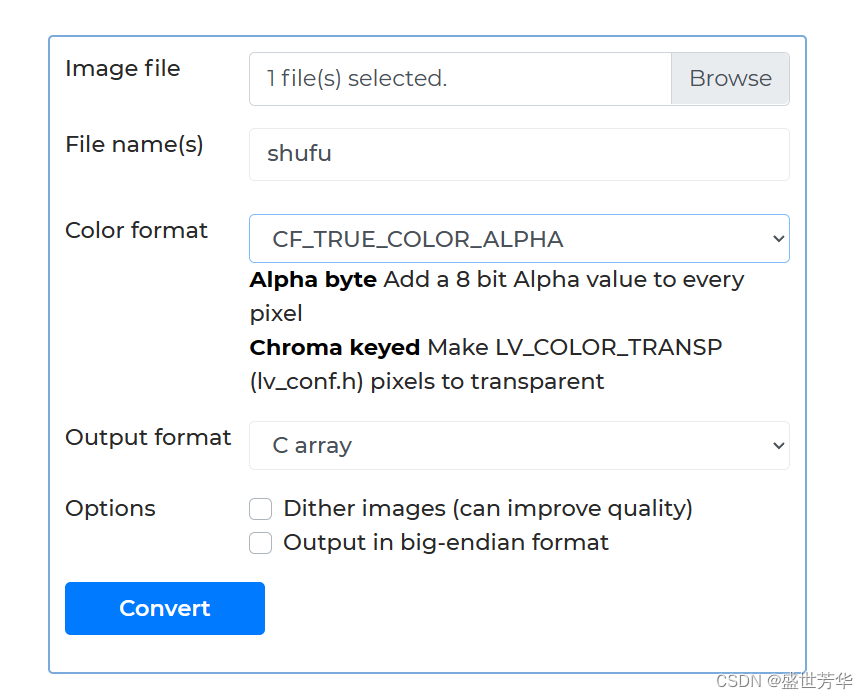
esp32使用lvgl,给图片取模显示图片
使用LVGL官方工具。 https://lvgl.io/tools/imageconverter 上传图片,如果想要透明效果,那么选择 输出格式C array,点击Convert进行转换。 下载.c文件放置到工程下使用即可。...

R语言使用scitb包10分钟快速绘制论文基线表
scitb包目前进行了升级到1.7版本了,我做了一个操作视频,如何快速绘制基线表。 scitb包绘制基线表 可以配套看下我的关于scitb包文章理解一下 scitb包1.6版本发布,一个为制作专业统计表格而生的R包...
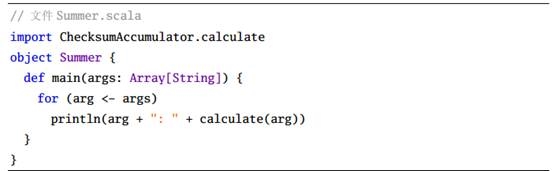
类和对象
1 类定义: class ChecksumAccumulator {// class definition goes here } 你就能创建 ChecksumAccumulator 对象:new CheckSumAccumulator 注:1scala类中成员默认是public类型,若设为私有属性则必须加private关键字。在scala中是…...
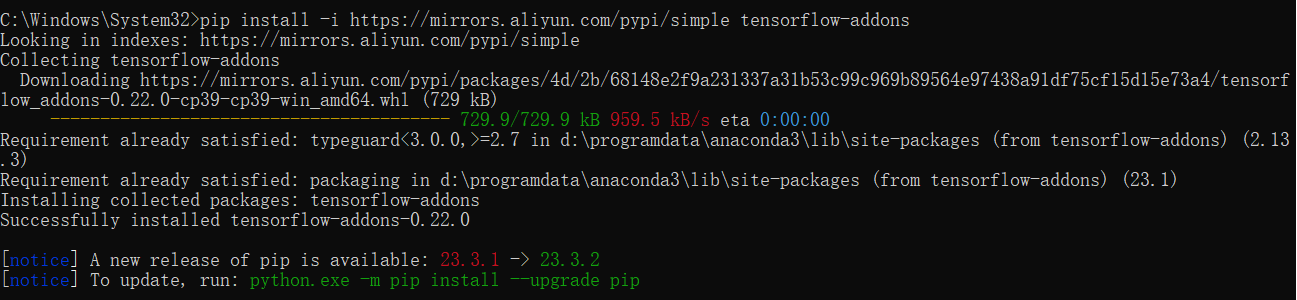
Py之tensorflow-addons:tensorflow-addons的简介、安装、使用方法之详细攻略
Py之tensorflow-addons:tensorflow-addons的简介、安装、使用方法之详细攻略 目录 tensorflow-addons的简介 tensorflow-addons的安装 tensorflow-addons的使用方法 1、使用 TensorFlow Addons 中的功能: tensorflow-addons的简介 TensorFlow Addon…...
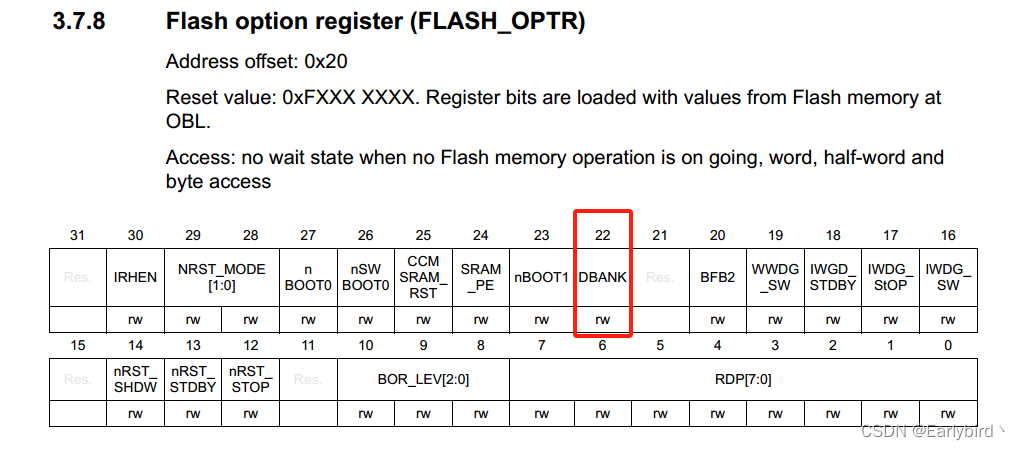
STM32G4x FLASH 读写配置结构体(LL库下使用)
主要工作就是把HAL的超时用LL库延时替代,保留了中断擦写模式、轮询等待擦写,我已经验证了部分。 笔者用的芯片为STM32G473CBT6 128KB Flash,开环环境为CUBEMXMDK5.32,因为G4已经没有标准库了,笔者还是习惯使用标准库的…...

【AI提示词人物篇】创新艺术未来,让科技改变想象空间
AI 绘画学习难度和练习技巧 学习绘画的技巧 学习能难度: 外貌特征:AI需要学习识别和理解各种外貌特征,如发型、肤色、眼睛颜色等。这可能需要大量的训练数据和复杂的模型架构。 镜头提示:AI需要学习理解不同镜头提示的含义&…...

登录shell与非登录shell、交互式与非交互式shell的知识点详细总结
一、登录shell与非登录shell 1.登录shell定义:指的是当用户登录系统时所取的那个shell,登录shell属于交互式shell。 登陆shell通常指的是:用户通过输入用户名/密码(或证书认证)后启动的shell.例如: 当时…...
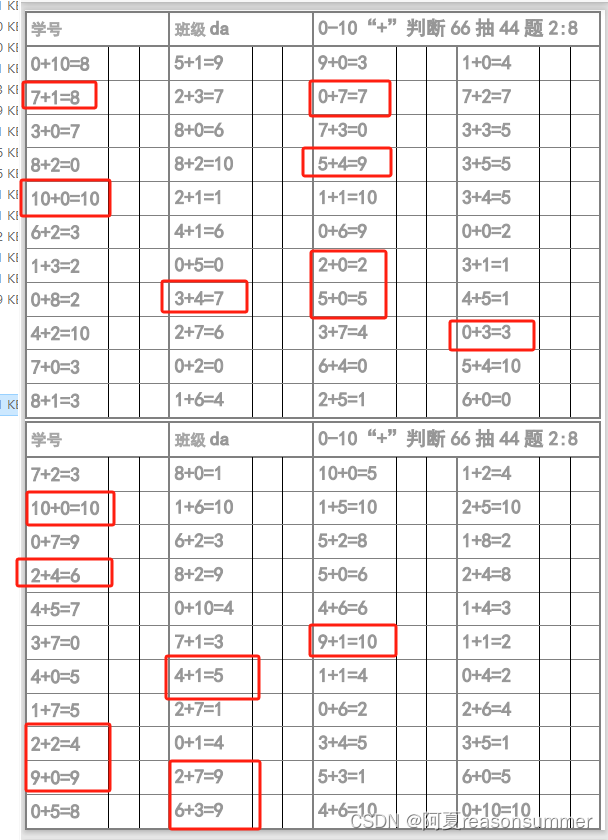
【教学类-42-02】20231224 X-Y 之间加法题判断题2.0(按2:8比例抽取正确题和错误题)
作品展示: 0-5: 21题,正确21题,错误21题42题 。小于44格子,都写上,哪怕输入2:8,实际也是5:5 0-10 66题,正确66题,错误66题132题 大于44格子,正确66题抽取44*…...
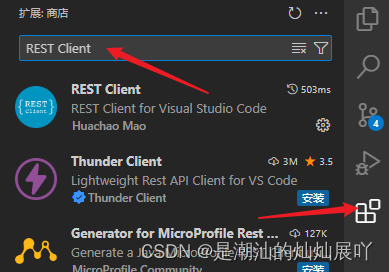
轻量Http客户端工具VSCode和IDEA
文章目录 前言Visual Studio Code 的插件 REST Client编写第一个案例进阶,设置变量进阶,设置Token IntelliJ IDEA 的 HTTP请求构建http脚本HTTP的环境配置结果值暂存 前言 作为一个WEB工程师,在日常的使用过程中,HTTP请求是必不可…...
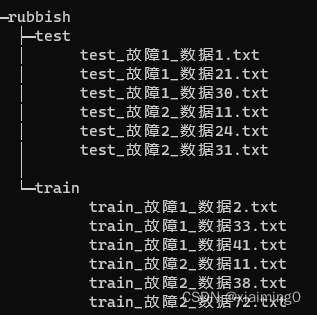
机器学习或深度学习的数据读取工作(大数据处理)
机器学习或深度学习的数据读取工作(大数据处理)主要是.split和re.findall和glob.glob运用。 读取文件的路径(为了获得文件内容)和提取文件路径中感兴趣的东西(标签) 1,“glob.glob”用于读取文件路径 2,“.…...

Rust 生命周期
Rust 第17节 生命周期 先看一段错误代码 /* //一段错误的代码 // Rust 编译时会报错; */let r;{let x 5;r &x;}println!("{}",r);Rust 在编译时使用 借用检查器, 比较作用域来检查所有的借用是否合法; 很明显;r…...
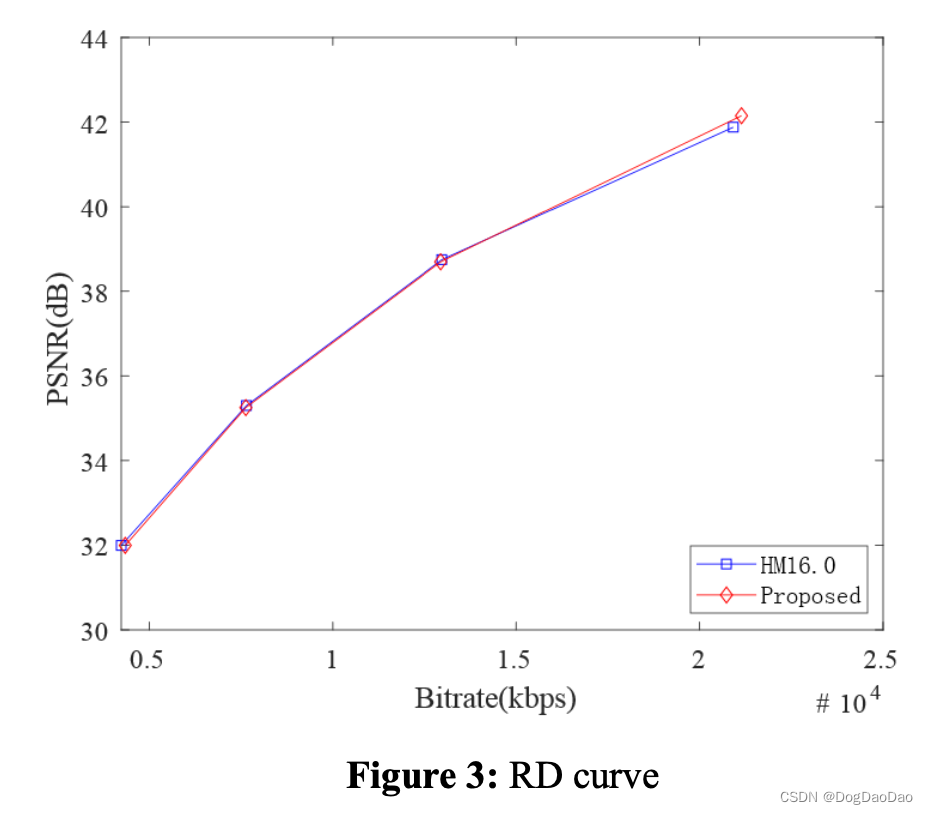
【论文解读】CNN-Based Fast HEVC Quantization Parameter Mode Decision
时间:2019 年 级别:SCI 机构:南京信息工程大学 摘要 随着多媒体呈现技术、图像采集技术和互联网行业的发展,远程通信的方式已经从以前的书信、音频转变为现在的音频/视频。和 视频在工作、学习和娱乐中的比例不断提高࿰…...

在Linux上安装CLion
本教程将指导你如何在Linux系统上安装CLion,下载地址为:https://download.jetbrains.com.cn/cpp/CLion-2022.3.3.tar.gz。以下是详细的安装步骤: 步骤1:下载CLion 首先,你需要使用wget命令从提供的URL下载CLion的tar…...
R语言贝叶斯网络模型、INLA下的贝叶斯回归、R语言现代贝叶斯统计学方法、R语言混合效应(多水平/层次/嵌套)模型
目录 ㈠ 基于R语言的贝叶斯网络模型的实践技术应用 ㈡ R语言贝叶斯方法在生态环境领域中的高阶技术应用 ㈢ 基于R语言贝叶斯进阶:INLA下的贝叶斯回归、生存分析、随机游走、广义可加模型、极端数据的贝叶斯分析 ㈣ 基于R语言的现代贝叶斯统计学方法(贝叶斯参数估…...
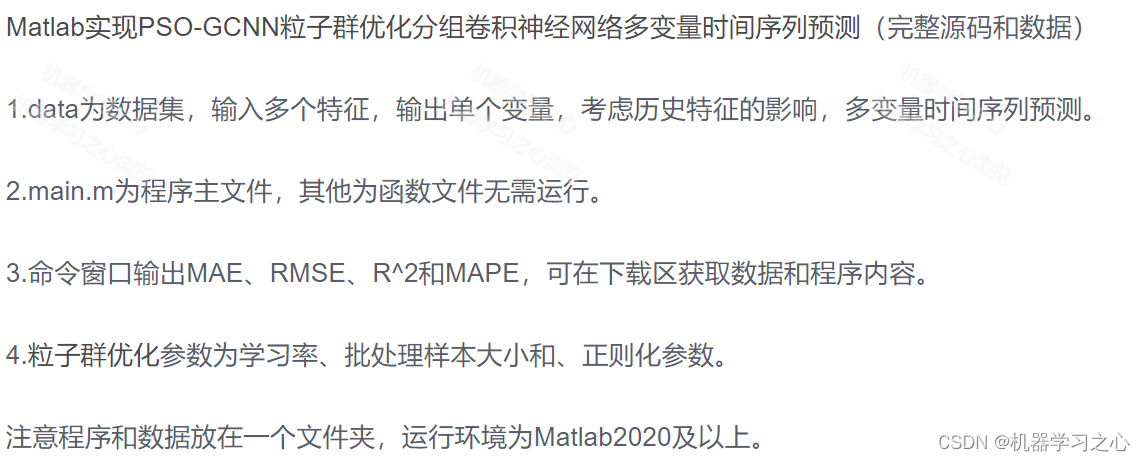
多维时序 | Matlab实现PSO-GCNN粒子群优化分组卷积神经网络多变量时间序列预测
多维时序 | Matlab实现PSO-GCNN粒子群优化分组卷积神经网络多变量时间序列预测 目录 多维时序 | Matlab实现PSO-GCNN粒子群优化分组卷积神经网络多变量时间序列预测预测效果基本介绍模型描述程序设计参考资料 预测效果 基本介绍 Matlab实现PSO-GCNN粒子群优化分组卷积神经网络多…...

Oracle 学习(1)
Oracle简介 Oracle是殷墟(yīn Xu)出土的甲骨文(oracle bone inscriptions)的英文翻译的第一个单词,在英语里是“神谕”的意思。Oracle公司成立于1977年,总部位于美国加州,是世界领先的信息管…...
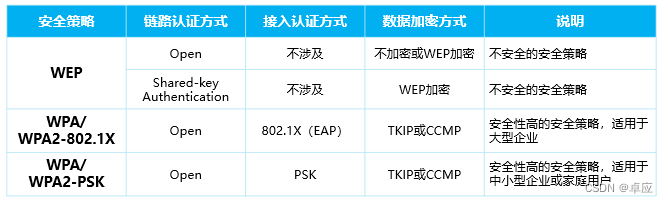
华为HCIA认证H12-811题库新增
801、[单选题]178/832、在系统视图下键入什么命令可以切换到用户视图? A quit B souter C system-view D user-view 试题答案:A 试题解析:在系统视图下键入quit命令退出到用户视图。因此答案选A。 802、[单选题]“网络管理员在三层交换机上创建了V…...

基于CircuitPython的巨型机械键盘:从嵌入式开发到定制输入设备实践
1. 项目概述:当机械键盘遇上“巨无霸”如果你和我一样,对机械键盘那清脆的段落感和扎实的敲击感着迷,同时又是个喜欢动手折腾的硬件爱好者,那么这个项目绝对能让你眼前一亮。我们这次要做的,不是常规的60%或87键键盘&a…...

为什么7-Zip-zstd让我的压缩效率提升了3倍?
为什么7-Zip-zstd让我的压缩效率提升了3倍? 【免费下载链接】7-Zip-zstd 7-Zip with support for Brotli, Fast-LZMA2, Lizard, LZ4, LZ5 and Zstandard 项目地址: https://gitcode.com/gh_mirrors/7z/7-Zip-zstd 你是否曾经面对一个巨大的项目备份文件&…...

从GPS模块到地图显示:手把手教你用Python解析NMEA-0183协议数据
从GPS模块到地图显示:Python实战NMEA-0183协议解析全流程 当你第一次将GPS模块连接到电脑,看到串口终端不断刷新的$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47这类神秘代码时,是否感到无从下手?本文将带你…...

MAA明日方舟小助手:让游戏回归乐趣的智能伙伴
MAA明日方舟小助手:让游戏回归乐趣的智能伙伴 【免费下载链接】MaaAssistantArknights 《明日方舟》小助手,全日常一键长草!| A one-click tool for the daily tasks of Arknights, supporting all clients. 项目地址: https://gitcode.com…...

大一学生揭秘科罗拉多矿业学院扫描技术:掌控投影仪和摄像头,问题待修复
大一学生掌控科罗拉多矿业学院投影仪和摄像头,扫描技术揭秘与问题修复情况曝光在科罗拉多矿业学院开启大一生活时,我发现当地 DNS 服务器会为每个连网设备分配子域名,如 “meow” 设备在校园无线网络显示为 “meow.mines.edu”,但…...

EB Garamond 12:免费复古字体完整指南,如何优雅应用于网页和印刷设计
EB Garamond 12:免费复古字体完整指南,如何优雅应用于网页和印刷设计 【免费下载链接】EBGaramond12 项目地址: https://gitcode.com/gh_mirrors/eb/EBGaramond12 EB Garamond 12是一款基于16世纪经典设计的开源复古字体,为设计师和开…...

Java——线程的中断
线程的中断1、取消/关闭的场景2、取消/关闭的机制3、线程对中断的反应3.1、Runnable3.2、Waiting/Timed_Waiting3.3、Blocked3.4、New/Terminate4、如何正确地取消/关闭线程1、取消/关闭的场景 我们知道,通过线程的start方法启动一个线程后,线程开始执行…...

1、Halcon频域魔法:从傅里叶变换到图像增强实战
1. 频域魔法:当工业视觉遇上傅里叶变换 第一次在Halcon里用傅里叶变换处理图像时,我盯着屏幕上的频域图看了足足十分钟——那些对称的亮斑和放射状条纹,活像一幅抽象派油画。但正是这幅"画"帮我解决了困扰团队两周的难题࿱…...

用字体绘制AI架构图:llama.ttf项目解析与OpenType字体技术实践
1. 项目概述:一个字体文件,为何能引发如此关注?最近在GitHub上,一个名为“fuglede/llama.ttf”的项目悄然走红,乍一看,这只是一个普通的字体仓库,但它的热度却远超许多复杂的软件库。作为一名长…...

ARM PMU性能监控单元原理与编程实践
1. ARM PMU性能监控基础架构解析 性能监控单元(Performance Monitoring Unit, PMU)是现代处理器微架构中的关键组件,它通过硬件计数器实现对处理器运行时行为的精确测量。在ARMv8/v9架构中,PMU的设计遵循了高度模块化和可扩展的原则,能够支持…...