Unity中Shader观察空间推导(在Shader中实现)
文章目录
- 前言
- 一、观察空间矩阵推导
- 1、求观察空间基向量
- 2、求观察空间的基向量在世界空间中的矩阵 的 逆矩阵
- 2、求平移变换矩阵
- 3、相乘得出 观察空间转化矩阵
- 4、得到顶点的世界空间坐标,然后转化到观察空间
- 5、把观察空间坐标转化为齐次裁剪坐标输出到屏幕
- 二、最终效果
- 1、这是我们用默认Shader,在该摄像机坐标下的游戏界面
- 2、使用我们的Shader,并且给我们的ViewPos赋值为摄像机坐标
- 3、最终代码
前言
在上篇文章中,我们是实现了Shader中的观察空间推导。
- Unity中Shader观察空间推导
我们在这篇文章中,根据上篇文章的推导,在Shader中实现观察空间矩阵的推导。
一、观察空间矩阵推导
-
Pview = [Wview] * Pworld
-
Pview = [Vworld]-1 * Pworld
-
Pview = [Vworld]T * Pworld
-
在属性面板定义测试使用到的 摄像机坐标 和 测试顶点坐标
_ViewPos(“View Pos”,vector) = (0,0,0,0)
_ViewTarget(“View Target”,vector) = (0,0,0,0)
1、求观察空间基向量
- Z坐标轴基向量
float3 ViewZ = normalize(_ViewPos - _ViewTarget);
- 假设Y坐标轴基向量为(0,1,0)
float3 ViewY = float3(0,1,0);
- 求 X 坐标基向量
float3 ViewX = cross(ViewZ,ViewY);
- 求 Y 坐标基向量
ViewY = cross(ViewX,ViewZ);
2、求观察空间的基向量在世界空间中的矩阵 的 逆矩阵
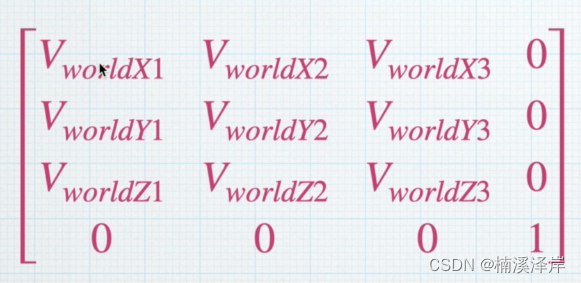
float4x4 M_viewTemp = float4x4
(
ViewX.x,ViewX.y,ViewX.z,0,
ViewY.x,ViewY.y,ViewY.z,0,
ViewZ.x,ViewZ.y,ViewZ.z,0,
0,0,0,1
);
2、求平移变换矩阵
1 0 0 − T x 0 1 0 − T y 0 0 1 − T z 0 0 0 1 \begin{matrix} 1&0&0&-T~x~\\ 0&1&0&-T~y~\\ 0&0&1&-T~z~\\ 0&0&0&1\\ \end{matrix} 100001000010−T x −T y −T z 1
float4x4 M_viewTranslate = float4x4
(
1,0,0,-_ViewPos.x,
0,1,0,-_ViewPos.y,
0,0,1,-_ViewPos.z,
0,0,0,1
);
3、相乘得出 观察空间转化矩阵
float4x4 M_view = mul(M_viewTemp,M_viewTranslate);
4、得到顶点的世界空间坐标,然后转化到观察空间
float3 vertexWS = TransformObjectToWorld(v.vertexOS);
float3 vertexVS = mul(M_view,float4(vertexWS,1));
5、把观察空间坐标转化为齐次裁剪坐标输出到屏幕
o.vertexCS = TransformWViewToHClip(vertexVS);
二、最终效果
1、这是我们用默认Shader,在该摄像机坐标下的游戏界面
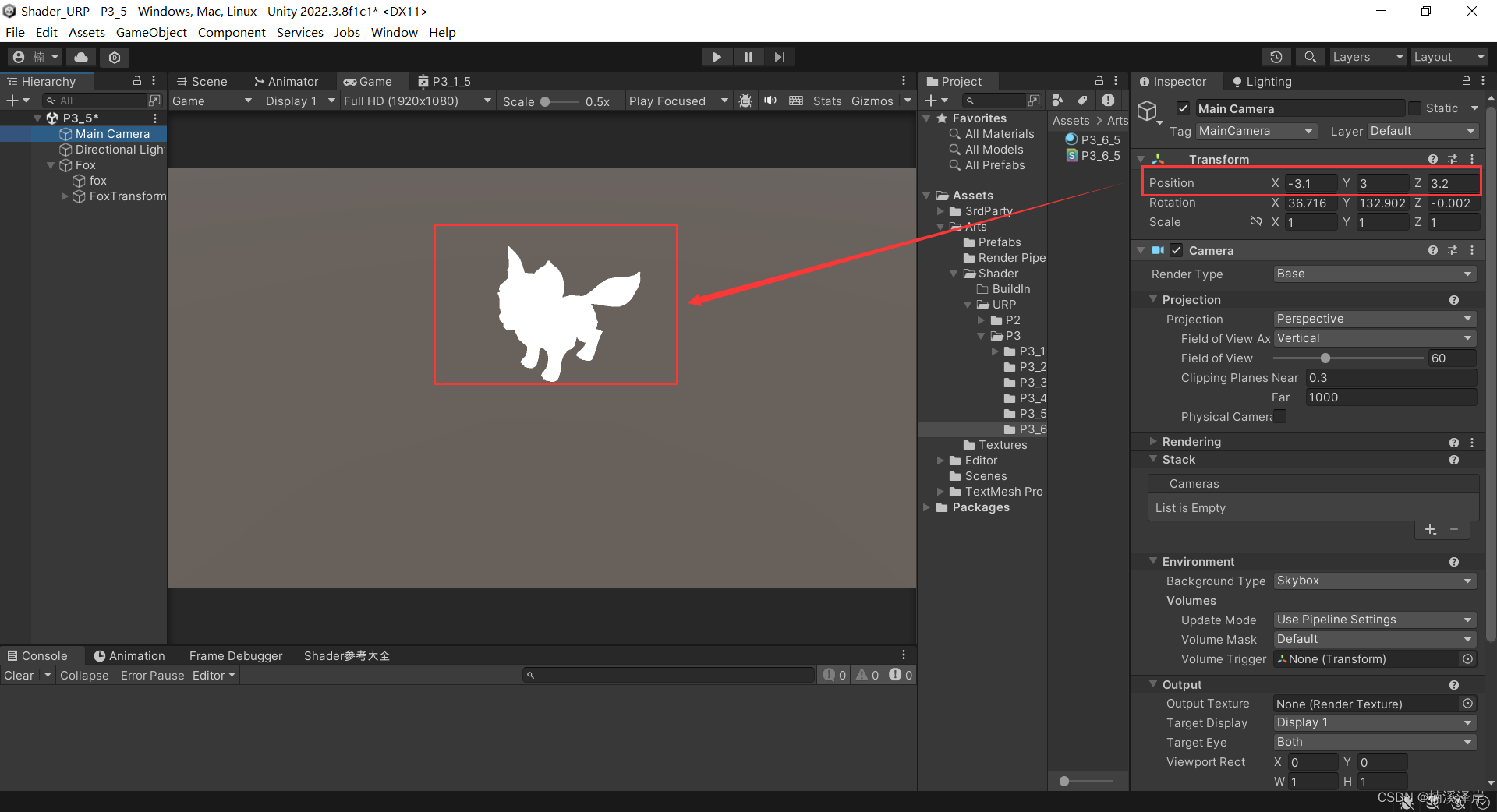
2、使用我们的Shader,并且给我们的ViewPos赋值为摄像机坐标
3、最终代码
//平移变换
//缩放变换
//旋转变换(四维)
Shader "MyShader/URP/P3_6_5"
{Properties{_Translate("Translate(XYZ)",Vector) = (0,0,0,0)_Scale("Scale(XYZ)",Vector)= (1,1,1,1)_Rotation("Rotation(XYZ)",Vector) = (0,0,0,0)[Header(View)]_ViewPos("View Pos",vector) = (0,0,0,0)_ViewTarget("View Target",vector) = (0,0,0,0)}SubShader{Tags{"PenderPipeline"="UniversalPipeline""RenderType"="Opaque""Queue"="Geometry"}Pass{HLSLPROGRAM#pragma vertex vert#pragma fragment frag#include "Packages/com.unity.render-pipelines.core/ShaderLibrary/Color.hlsl"#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Core.hlsl"#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Lighting.hlsl"struct Attribute{float4 vertexOS : POSITION;};struct Varying{float4 vertexCS : SV_POSITION;};CBUFFER_START(UnityPerMaterial)float4 _Translate;float4 _Scale;float4 _Rotation;float4 _ViewPos;float4 _ViewTarget;CBUFFER_ENDVarying vert (Attribute v){Varying o;//平移变换float4x4 M_Translate = float4x4(1,0,0,_Translate.x,0,1,0,_Translate.y,0,0,1,_Translate.z,0,0,0,1);v.vertexOS = mul(M_Translate,v.vertexOS);//缩放交换float4x4 M_Scale = float4x4(_Scale.x,0,0,0,0,_Scale.y,0,0,0,0,_Scale.z,0,0,0,0,1);v.vertexOS = mul(M_Scale,v.vertexOS);//旋转变换float4x4 M_rotateX = float4x4(1,0,0,0,0,cos(_Rotation.x),sin(_Rotation.x),0,0,-sin(_Rotation.x),cos(_Rotation.x),0,0,0,0,1);float4x4 M_rotateY = float4x4(cos(_Rotation.y),0,sin(_Rotation.y),0,0,1,0,0,-sin(_Rotation.y),0,cos(_Rotation.y),0,0,0,0,1);float4x4 M_rotateZ = float4x4(cos(_Rotation.z),sin(_Rotation.z),0,0,-sin(_Rotation.z),cos(_Rotation.z),0,0,0,0,1,0,0,0,0,1);v.vertexOS = mul(M_rotateX,v.vertexOS);v.vertexOS = mul(M_rotateY,v.vertexOS);v.vertexOS = mul(M_rotateZ,v.vertexOS);//观察空间矩阵推导//P_view = [W_view] * P_world//P_view = [V_world]^-1 * P_world//P_view = [V_world]^T * P_worldfloat3 ViewZ = normalize(_ViewPos - _ViewTarget);float3 ViewY = float3(0,1,0);float3 ViewX = cross(ViewZ,ViewY);ViewY = cross(ViewX,ViewZ);float4x4 M_viewTemp = float4x4(ViewX.x,ViewX.y,ViewX.z,0,ViewY.x,ViewY.y,ViewY.z,0,ViewZ.x,ViewZ.y,ViewZ.z,0,0,0,0,1);float4x4 M_viewTranslate = float4x4(1,0,0,-_ViewPos.x,0,1,0,-_ViewPos.y,0,0,1,-_ViewPos.z,0,0,0,1);float4x4 M_view = mul(M_viewTemp,M_viewTranslate);float3 vertexWS = TransformObjectToWorld(v.vertexOS);float3 vertexVS = mul(M_view,float4(vertexWS,1));o.vertexCS = TransformWViewToHClip(vertexVS);//o.vertexCS = TransformObjectToHClip(v.vertexOS.xyz);return o;}half4 frag (Varying i) : SV_Target{return 1;}ENDHLSL}}
}相关文章:
Unity中Shader观察空间推导(在Shader中实现)
文章目录 前言一、观察空间矩阵推导1、求观察空间基向量2、求观察空间的基向量在世界空间中的矩阵 的 逆矩阵2、求平移变换矩阵3、相乘得出 观察空间转化矩阵4、得到顶点的世界空间坐标,然后转化到观察空间5、把观察空间坐标转化为齐次裁剪坐标输出到屏幕 二、最终效…...

Hive04_DDL操作
Hive DDL操作 1 DDL 数据定义 1.1 创建数据库 CREATE DATABASE [IF NOT EXISTS] database_name [COMMENT database_comment] [LOCATION hdfs_path] [WITH DBPROPERTIES (property_nameproperty_value, ...)];[IF NOT EXISTS] :判断是否存在 [COMMENT database_c…...

odoo17核心概念view4——view.js
这是view系列的第四篇文章,专门介绍View组件。 作为一个Component,它总共包含js、css、xml三个标准文件,当然最重要的是view.js 首先在setup函数中对传入的参数props做了各种校验,然后扩展了subenv useSubEnv({keepLast: new Kee…...

Centos7 openSSL
阅读时长:10分钟 本文内容: 在阿里云Centos7上部署python3.10.6项目时遇到openSSL协议不支持,导致无法下载第三方包 本文目的: 通过手动编译,升级openssl版本centos7 重编译 python3.10.6github下载缓慢解决镜像源记录…...

Web 安全之文件下载漏洞详解
目录 引言 文件下载漏洞原理 文件下载漏洞的危害 文件下载漏洞类型 文件下载漏洞的利用方法 文件下载漏洞示例 文件下载漏洞的防护措施 漏洞检测与测试 小结 引言 在数字化时代,文件下载是网络应用程序的重要的功能之一,用户可以通过这一功能获…...
搬运机器人RFID传感器CNS-RFID-01|1S的RS485(MODBUS|HS协议)通讯连接方法
搬运机器人RFID传感器CNS-RFID-01|1S支持RS485通信,可支持RS485(MODBUS RTU)协议、RS485-HS协议,广泛应用于物流仓储,立库 AGV|无人叉车|搬送机器人等领域,常用定位、驻车等,本篇重点介绍CNS-RF…...

使用ZMQ.proxy实现ZMQ PUB消息转发
MQ.proxy 是 ZeroMQ 库中的一个功能,用于创建一个简单的代理服务器。它可以将消息从一个套接字传递到另一个套接字,实现消息的转发和路由。 要使用 ZMQ.proxy,需要按照以下步骤进行操作: 创建两个 ZMQ.Socket 对象:一个…...
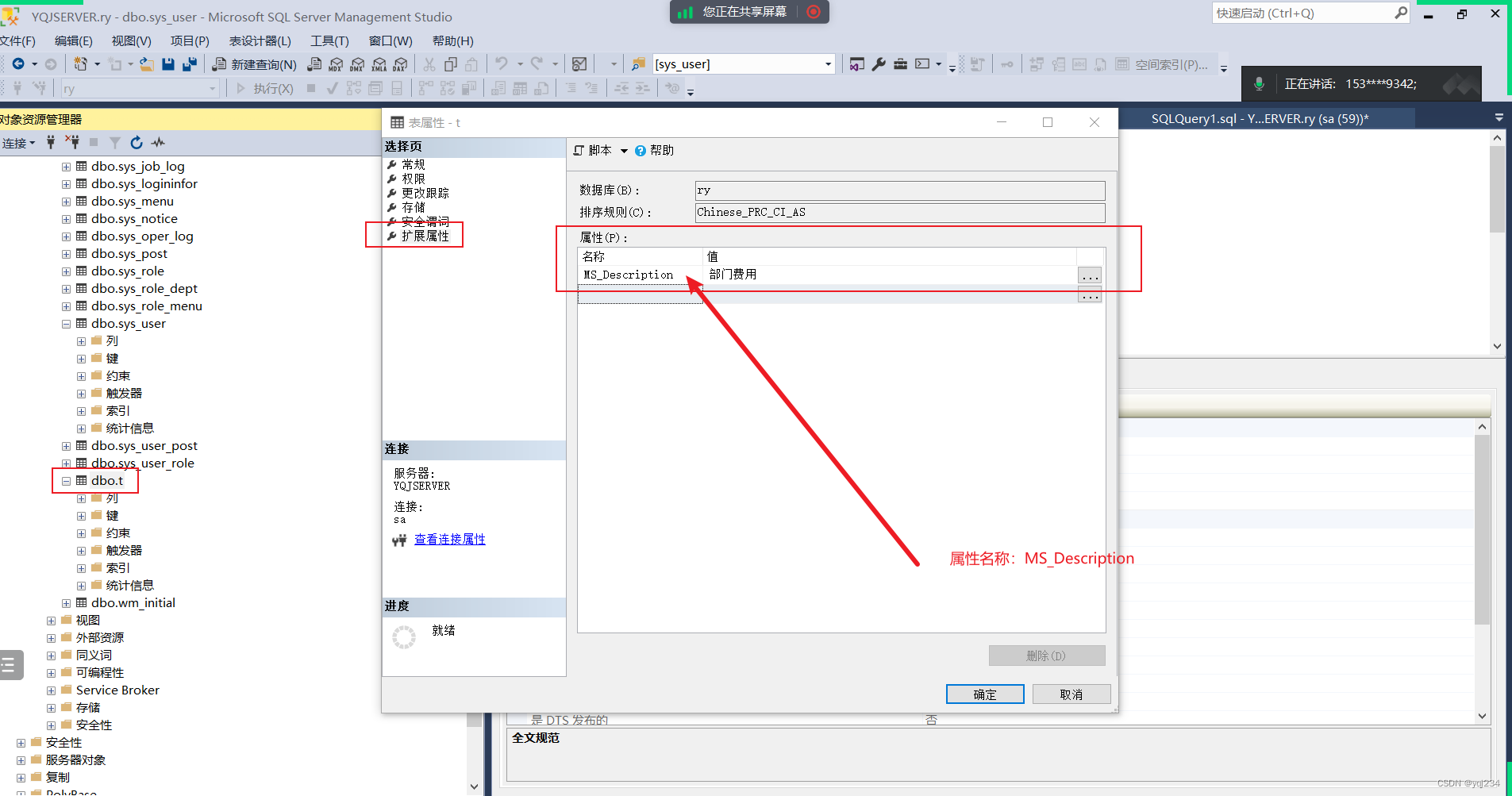
若依SQL Server开发使用教程
1. sys_menu表中的将菜单ID修改为自动ID,解决不能增加菜单的问题,操作流程如下: 解决方案如下 菜单栏->工具->选项 点击设计器,去掉阻止保存要求更新创建表的更改选项,点确认既可以保存了 2 自动生成代码找不表的解决方案…...

Mysql5.7服务器选项、系统变量和状态变量参考
官网地址:MySQL :: MySQL 5.7 Reference Manual :: 5.1.3 Server Option, System Variable, and Status Variable Reference 欢迎关注留言,我是收集整理小能手,工具翻译,仅供参考,笔芯笔芯. MySQL 5.7 参考手册 / ..…...

【Qt-Qss-Style】
Qt编程指南 ■ Qss■ Style■ setStyleSheet ■ style.qss■ border■ 去除弹框背景圆角■ QProgressBar样式表 ■ Qss Qt 支持很多种常见 符号 “>”代表直属子部件,说明两个控件之间是父子关系。 “#”代表后面的字段是前面控件类型的名称,当然也可…...

基于yolov8,制作停车位计数器(附源码)
大家好,YOLO(You Only Look Once) 是由Joseph Redmon和Ali开发的一种对象检测和图像分割模型。 YOLO的第一个版本于2015年发布,由于其高速度和准确性,瞬间得到了广大AI爱好者的喜爱。 Ultralytics YOLOv8则是一款前沿、最先进(SOTA)的模型&a…...
)
C++设计模式:单例模式(饿汉式、懒汉式)
单例模式是什么? 单例模式是一种创建型的软件设计模式。通过单例模式的设计,使得创建的类在当前进程中只有唯一一个实例,并提供一个全局性的访问点,这样可以规避因频繁创建对象而导致的内存飙升情况。 单例模式有三个要点 私有化…...
Django 访问前端页面一直在转异常:ReferenceError:axios is not defined
访问:http://127.0.0.1:8080/ my.html 一、异常: 二、原因 提示:axios找不到!! 查看代码<script src"https://unpkg.com/axios/dist/axios.min.js"></script>无法访问到官网 三、解决 Using j…...

C语言中关于指针的理解
#include <stdio.h> int main() {int a11;int *p&a; //因为a是整型的,所以我们定义指针p的时候要和a的类型一样char b;char *pa&b; //同理,b是字符型,所以这里的pa也要用字符型return 0; }因为*p指向的是地址&…...

MySQL MVCC精讲
版本链 我们前面说过,对于使用InnoDB存储引擎的表来说,它的聚簇索引记录中都包含两个必要的隐藏列(row_id并不是必要的,我们创建的表中有主键或者非NULL的UNIQUE键时都不会包含row_id列): trx_idÿ…...

如何快速删除pdf周围的空白
问题:写论文往往需要pdf格式的图片,但pdf往往四周存在大量空白需要手动截图很麻烦 解决: 打开命令行输入:pdfcrop 图片名.pdf...
蓝桥杯c/c++程序设计——数位排序
数位排序【第十三届】【省赛】【C组】 题目描述 小蓝对一个数的数位之和很感兴趣,今天他要按照数位之和给数排序。 当两个数各个数位之和不同时,将数位和较小的排在前面,当数位之和相等时,将数值小的排在前面。 例如࿰…...

【通讯录案例-搭建登录界面 Objective-C语言】
一、来看我们这个通讯录案例 1.接下来啊,我们来做这个通讯录案例, 然后呢,做这么一个应用程序啊, 我们第一步呢,先把界面儿搭了, 然后呢,搭之前,简单的来分析一下, 首先呢,这是,中间儿的这一块儿, 1)有个“账户”、“密码”,这一块儿, 这是一个什么控制器,…...

二叉搜索树、AVL、红黑树、B树
文章目录 二叉搜索树2. avl树3. 红黑树 b树和b树比较适合与磁盘打交道的,磁盘操作耗时,这些树 矮,红黑树、avL树高,比较适合与内存打交道。 二叉搜索树 找一个节点的前驱和后继: 前驱:如果节点有左子树&a…...
格密码:傅里叶矩阵
目录 一. 铺垫性介绍 1.1 傅里叶级数 1.2 傅里叶矩阵的来源 二. 格基与傅里叶矩阵 2.1 傅里叶矩阵详细解释 2.2 格基与傅里叶矩阵 写在前面:有关傅里叶变换的解释太多了,这篇博客主要总结傅里叶矩阵在格密码中的运用。对于有一定傅里叶变换基础的同…...

[特殊字符] TCP/IP四层协议栈解析——互联网通信的“底层逻辑“
📅 发布时间:2026年5月 | 🏷️ 标签:TCP/IP、网络协议、网络架构、互联网原理、网络层 🔍 SEO关键词:TCP/IP协议栈、四层模型、ARP协议、IP协议、网络通信原理开篇暴击:你正在看这篇文章&#x…...

贪吃蛇游戏设计-7.完整系统
7.完整系统 完整系统Snake代码太多,另有源码。 一个基于 HarmonyOS ArkTS 开发的经典贪吃蛇游戏,适合作为 ArkTS 开发的学习项目。 功能特性 🎮 经典贪吃蛇玩法 📊 实时分数显示 🏆 最高分记录 📝 玩家姓名输入与成绩保存 📋 排行榜展示 🗑️ 排行榜滑动删除功…...
)
告别协议地狱!用HTTP服务搞定Fanuc、西门子等主流数控机床数据采集(Java开发者福音)
工业4.0时代:Java开发者如何用HTTP服务打通数控机床数据孤岛 在智能制造浪潮席卷全球的今天,MES/ERP系统与生产设备的无缝对接已成为数字化工厂的标配需求。然而,当Java开发者面对Fanuc、西门子等数控系统封闭的协议生态时,往往会…...

2026毕业季降AI工具排行榜,4款知网维普降AI软件横评
2026年毕业季过半,但还有大量同学的论文卡在AIGC检测这一关。知网在年初做了一次算法升级,维普、万方也在跟进,检测变得越来越严。论文一个字没改,去年12月查AI率18%能过,今年再查变成32%,很多同学就是栽在…...

B站SEO优化底层逻辑:以用户需求为核心,解锁低成本流量密码
在B站流量竞争日趋激烈的当下,很多创作者陷入“唯算法论”的误区,过度纠结于完播率、互动量等数据,却忽略了SEO优化的本质——匹配用户搜索需求。 一、认知重构:B站SEO的本质是“用户需求匹配”,而非“算法博弈”多数创…...

Semi Design v2.98.0 发布:多项组件功能更新与问题修复,助力搭建美观 React 应用
【Feature】新增douyinfe/semi-vite-plugin包,提供 Vite 构建场景下的主题定制等能力,与douyinfe/semi-webpack-plugin特性对齐;Calendar 组件新增onMoreClickprop,支持自定义月视图下"还有几项"的点击事件;…...

水质在线监测系统嵌入式工控机选型与实战指南
1. 水质在线监测:从传统抽检到智慧物联的必然之路水,是生命之源,也是城市运行的命脉。过去,我们了解水源地的水质状况,主要依赖人工定期采样、送回实验室分析。这种方式周期长、成本高,面对突发性污染事件&…...
)
用STM32F103和LORA模块,从零搭建一个轮询式本地传感网(附避坑点)
基于STM32F103与LoRa的工业级轮询传感网实战指南 在工业物联网和智能农业领域,稳定可靠的无线传感网络是数据采集的基石。当我们手头有几个STM32F103开发板和LoRa模块时,如何构建一个抗干扰性强、响应及时的轮询式传感网络?本文将深入解析从硬…...

强化学习回报归一化:ARN方法原理与SFC分区实践
1. 强化学习中的回报归一化:理论与实现在深度强化学习(DRL)的实际应用中,训练稳定性一直是困扰研究者的核心难题。特别是在处理服务功能链(SFC)分区等复杂网络编排任务时,由于任务周期长、状态空…...

DocLayout-YOLO实战案例:从学术论文到财务报表的布局分析
DocLayout-YOLO实战案例:从学术论文到财务报表的布局分析 【免费下载链接】DocLayout-YOLO DocLayout-YOLO: Enhancing Document Layout Analysis through Diverse Synthetic Data and Global-to-Local Adaptive Perception 项目地址: https://gitcode.com/gh_mir…...