RM3100 stm32驱动(硬件i2c)
目录
- RM3100接线
- HAL库I2C函数
- HAL_I2C_Mem_Read
- HAL_I2C_Mem_Write
- HAL_I2C_Master_Transmit / HAL_I2C_Master_Receive
- 例子 HSHAKE寄存器
- cubemx配置
- RM3100寄存器
- 驱动
- 最终效果
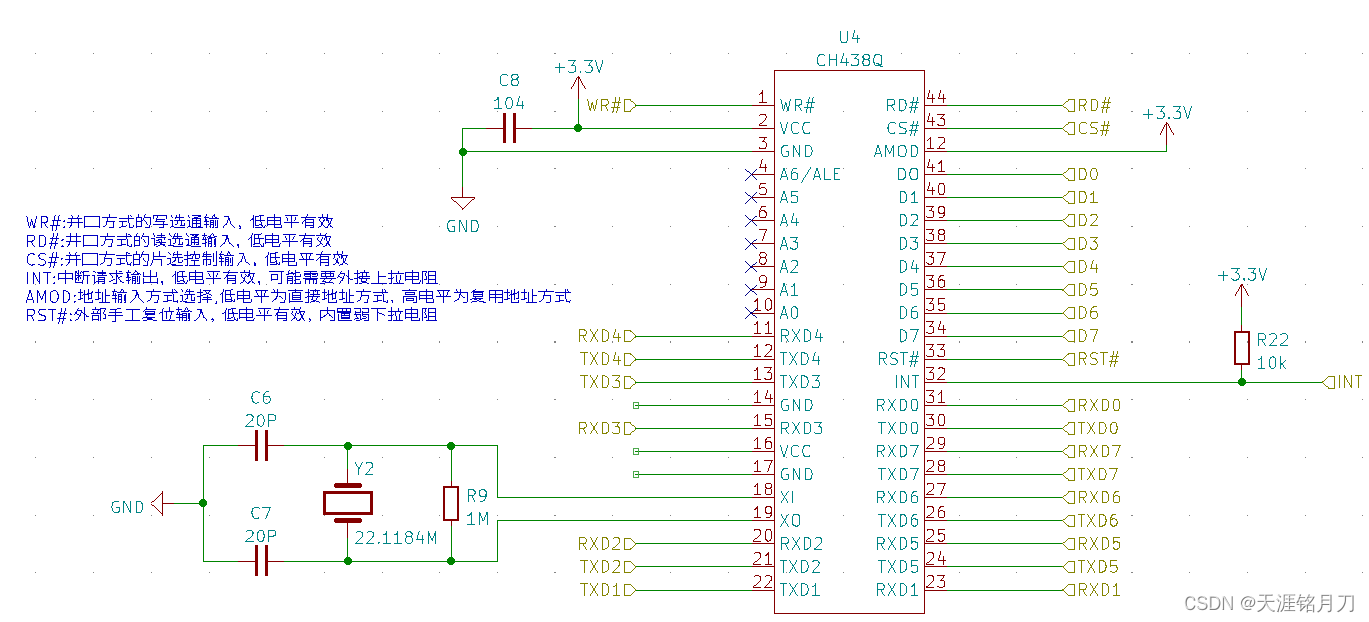
RM3100接线
原理图

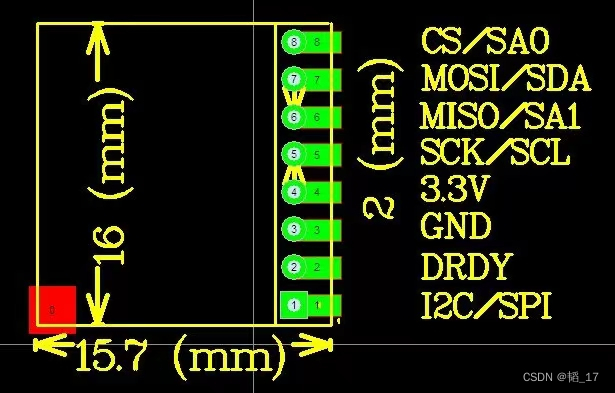
SA0 SA1接地,此时i2c设备地址为0100000,即0x20
如果SA0接高,SA1接地,地址为0100001,即0x21
如果SA0接地,SA1接高,地址为0100010,即0x22
SDA SCL正常接单片机,要上拉
I2C/SPI接高,选择I2C模式
手册下载链接
HAL库I2C函数
stm32 hal库对于i2c的操作有几个函数:
HAL_I2C_Mem_Read
hi2c:i2cx,比如 &hi2c1
DevAddress:左移一位的传感器设备地址,比如RM3100原来是0x20,要输入(0x20<<1)即0x40
MemAddress:要读取的寄存器地址,这个不用左移,按照手册里面即可,比如HSHAKE寄存器就是0x35
MemAddSize:一般I2C_MEMADD_SIZE_8BIT
后面几个正常写即可,pData传指针把读出来数据传递出来,比如HSHAKE寄存器(0x35)读出来就是0x1B
/*** @brief Read an amount of data in blocking mode from a specific memory address* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param MemAddress Internal memory address* @param MemAddSize Size of internal memory address* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
HAL_I2C_Mem_Write
和上面类似,不同的是pData 变成了往里面写的数据
/*** @brief Write an amount of data in blocking mode to a specific memory address* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param MemAddress Internal memory address* @param MemAddSize Size of internal memory address* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint16_t MemAddress, uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout)
HAL_I2C_Master_Transmit / HAL_I2C_Master_Receive
这俩成对用,可以看到他俩都么有MemAddress
先调用HAL_I2C_Master_Transmit,pData写成MemAddress地址,再调用HAL_I2C_Master_Receive收数据
/*** @brief Transmits in master mode an amount of data in blocking mode.* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout)
/*** @brief Receives in master mode an amount of data in blocking mode.* @param hi2c Pointer to a I2C_HandleTypeDef structure that contains* the configuration information for the specified I2C.* @param DevAddress Target device address: The device 7 bits address value* in datasheet must be shifted to the left before calling the interface* @param pData Pointer to data buffer* @param Size Amount of data to be sent* @param Timeout Timeout duration* @retval HAL status*/
HAL_StatusTypeDef HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout)
例子 HSHAKE寄存器
两种写法,data即为读出来数据,应该是0x1B
uint8_t data=0;
HAL_StatusTypeDef status = HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_HSHAKE,I2C_MEMADD_SIZE_8BIT,&data, 1, 1000);
uint8_t data=0;
uint8_t addr_hshake=ADDR_HSHAKE;//0x35
HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&RM3100_I2C,RM3100_ADDRESS,&addr_hshake,1,1000); //addr_hshake要写成目标寄存器地址
status = HAL_I2C_Master_Receive(&RM3100_I2C,(RM3100_ADDRESS|1),&data,1,1000);
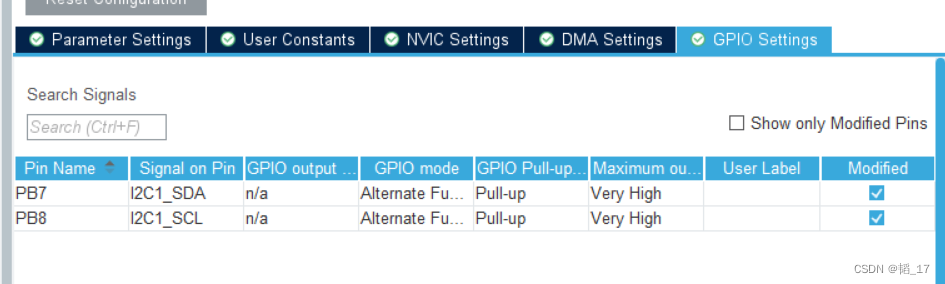
cubemx配置
正常使用I2C即可,选择fast mode,最高400k可以工作
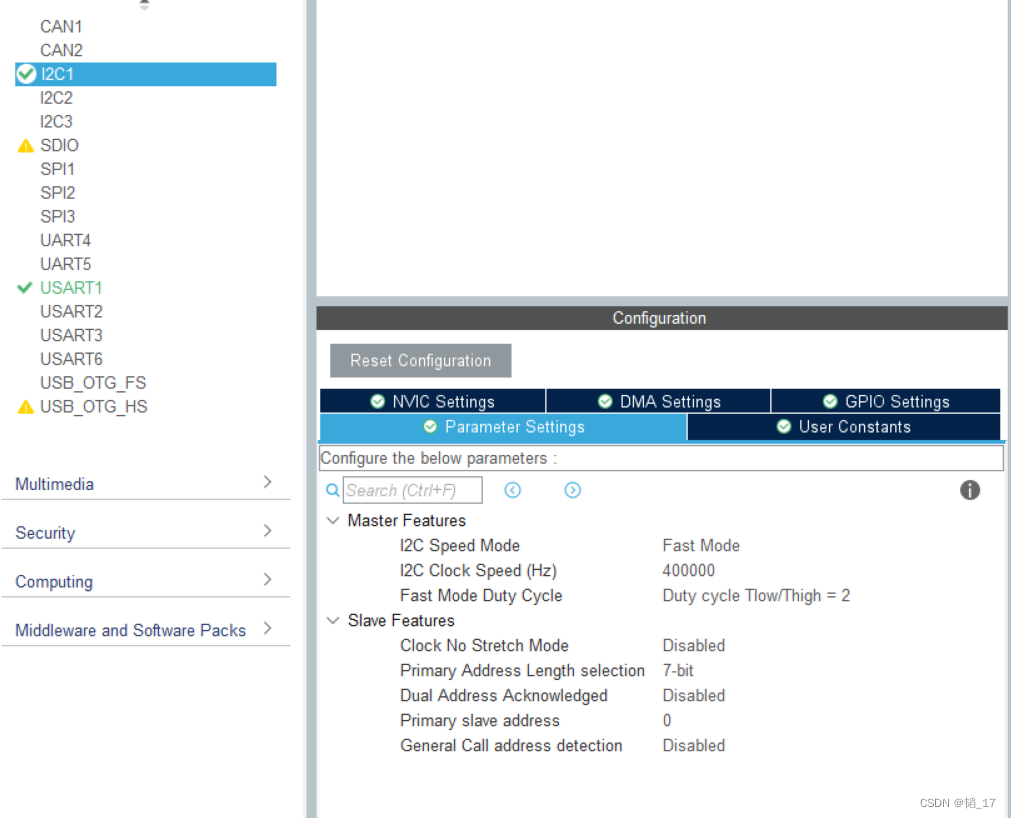
需要上拉,最好硬件上也拉一下
RM3100寄存器
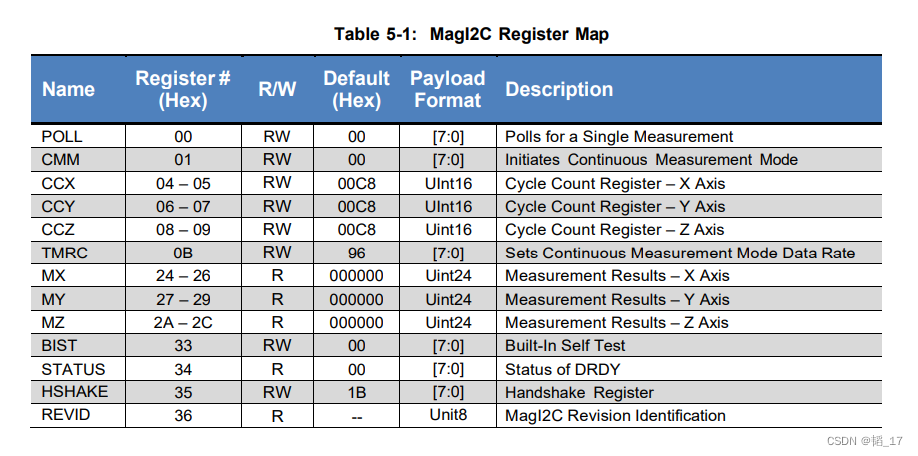
上面提示了对于I2C,读写地址不一样,因为有一位0/1标志着读/写,但是不用管,hal库帮我们搞好了,直接对着第二列填MemAddress即可

驱动
采用poll写法,参考手册5.3 5.8 5.8.2
.h文件
#ifndef __RM3100_H
#define __RM3100_H
#include "main.h"
#include "i2c.h"#define RM3100_I2C hi2c1
#define RM3100_ADDRESS 0x20<<1 //AD0 AD1都接地#define RM3100_CONVERSION_INTERVAL 10000 // Microseconds, corresponds to 100 Hz (cycle count 200 on 3 axis)
#define UTESLA_TO_GAUSS 100.0f
#define RM3100_SENSITIVITY 75.0f#define ADDR_POLL 0x00
#define ADDR_CMM 0x01
#define ADDR_CCX 0x04
#define ADDR_CCY 0x06
#define ADDR_CCZ 0x08
#define ADDR_TMRC 0x0B
#define ADDR_MX 0x24
#define ADDR_MY 0x27
#define ADDR_MZ 0x2A
#define ADDR_BIST 0x33
#define ADDR_STATUS 0x34
//#define ADDR_STATUS_READ 0xB4 //0X34|0X80
#define ADDR_HSHAKE 0x35
#define ADDR_REVID 0x36#define CCX_DEFAULT_MSB 0x00
#define CCX_DEFAULT_LSB 0xC8
#define CCY_DEFAULT_MSB CCX_DEFAULT_MSB
#define CCY_DEFAULT_LSB CCX_DEFAULT_LSB
#define CCZ_DEFAULT_MSB CCX_DEFAULT_MSB
#define CCZ_DEFAULT_LSB CCX_DEFAULT_LSB
#define CMM_DEFAULT 0x70 // No continuous mode
#define CONTINUOUS_MODE (1 << 0)
#define POLLING_MODE (0 << 0)
#define TMRC_DEFAULT 0x94
#define BIST_SELFTEST 0x8F
#define BIST_DEFAULT 0x00
#define BIST_XYZ_OK ((1 << 4) | (1 << 5) | (1 << 6))
#define STATUS_DRDY (1 << 7)
#define POLL_XYZ 0x70
#define RM3100_REVID 0x22#define NUM_BUS_OPTIONS (sizeof(bus_options)/sizeof(bus_options[0]))uint8_t RM3100ReadID(void);
uint8_t RM3100_Init(void);
uint8_t RM3100_GetData(short *x,short *y,short*z);
uint8_t RM3100_CheckDataReady(void);
#endif.c文件
#include "RM3100.h"uint8_t RM3100ReadID(void){uint8_t data=0;uint8_t addr_hshake=ADDR_HSHAKE;
// HAL_StatusTypeDef status = HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_HSHAKE,I2C_MEMADD_SIZE_8BIT,&data, 1, 1000);HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&RM3100_I2C,RM3100_ADDRESS,&addr_hshake,1,1000); //addr_hshake要写成目标寄存器地址status = HAL_I2C_Master_Receive(&RM3100_I2C,(RM3100_ADDRESS|1),&data,1,1000);//两种写法都可以,读取0x35寄存器值,并与1b进行比较if(status!=HAL_OK){printf("RM3100 I2C Error!\r\n");return 1;}else{if(data!=0x1B){printf("RM3100 detected Error! %x\r\n",data);return 1;}else{printf("RM3100 Address = %x\r\n",data);return 0;}}
}uint8_t RM3100_Init(void){uint8_t CCR[6] = {0, 200, 0, 200, 0, 200};if(RM3100ReadID()) {return 1;}else{HAL_StatusTypeDef status = HAL_I2C_Mem_Write(&RM3100_I2C,RM3100_ADDRESS,ADDR_CCX,I2C_MEMADD_SIZE_8BIT,CCR, 6, 1000);//发送一次poll请求,开始测量uint8_t data=POLL_XYZ;HAL_StatusTypeDef status1 = HAL_I2C_Mem_Write(&RM3100_I2C,RM3100_ADDRESS,ADDR_POLL,I2C_MEMADD_SIZE_8BIT,&data, 1, 1000);if(status!=HAL_OK | status1!=HAL_OK){printf("Error!,status=%d,status1=%d\r\n",status,status1);return 1;}else{return 0;} }
}uint8_t RM3100_CheckDataReady(void)
{uint8_t cResult;HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_STATUS,I2C_MEMADD_SIZE_8BIT,&cResult,1,1000);cResult = cResult&0x80;
// printf("%x\r\n",cResult);return cResult;
}uint8_t RM3100_GetData(short *x,short *y,short*z){static long Mag_Data[3] = {0};uint8_t temp[9]={0};uint8_t poll_request=POLL_XYZ;if(RM3100_CheckDataReady()==0x80){//data ready//读取9个字节HAL_StatusTypeDef status = HAL_I2C_Mem_Read(&RM3100_I2C,RM3100_ADDRESS,ADDR_MX,I2C_MEMADD_SIZE_8BIT,temp, 9, 1000);Mag_Data[0]= (long)temp[0]<<16 | (long)temp[1]<<8 | temp[2];if(Mag_Data[0] >= 0x00800000) {Mag_Data[0] |= 0xff000000;}Mag_Data[1] = (long)temp[3]<<16 | (long)temp[4]<<8 | temp[5];if(Mag_Data[1] >= 0x00800000) {Mag_Data[1] |= 0xff000000;}Mag_Data[2] = (long)temp[6]<<16 | (long)temp[7]<<8 | temp[8];if(Mag_Data[2] >= 0x00800000) {Mag_Data[2] |= 0xff000000;}*y = -Mag_Data[0];*x = -Mag_Data[1];*z = -Mag_Data[2];//发送一次poll请求,开始测量HAL_StatusTypeDef status1 = HAL_I2C_Mem_Write(&RM3100_I2C,RM3100_ADDRESS,ADDR_POLL,I2C_MEMADD_SIZE_8BIT,&poll_request, 1, 1000);if(status!=HAL_OK | status1!=HAL_OK){printf("Error!,status=%d,status1=%d\r\n",status,status1);return 1;}else{return 0;}}else{printf("Data Not Ready!\r\n");return 1;}
}主函数:
int main(void)
{//初始化……RM3100_Init();short hx,hy,hz=0;while (1){RM3100_GetData(&hx, &hy, &hz);printf("RM3100 hx: %d, hy: %d, hz: %d\r\n", hx, hy, hz);HAL_Delay(8);}
}
其他功能没写,后面慢慢补上
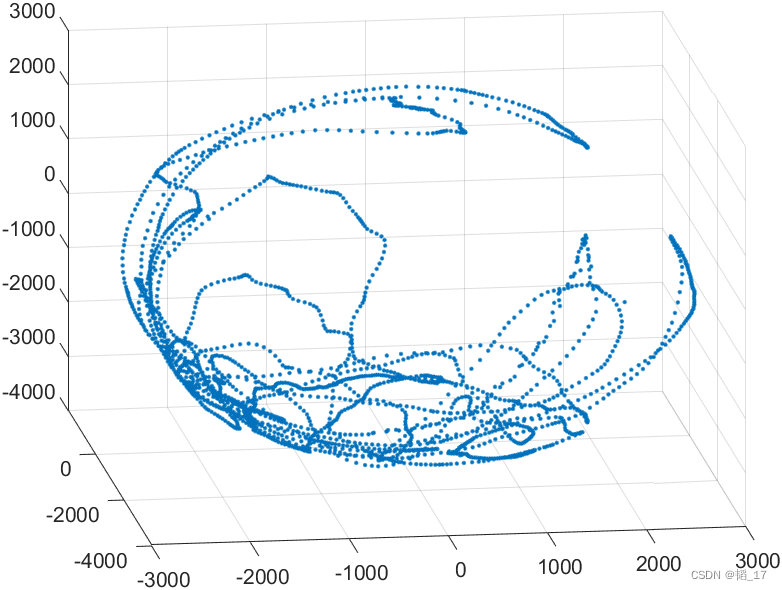
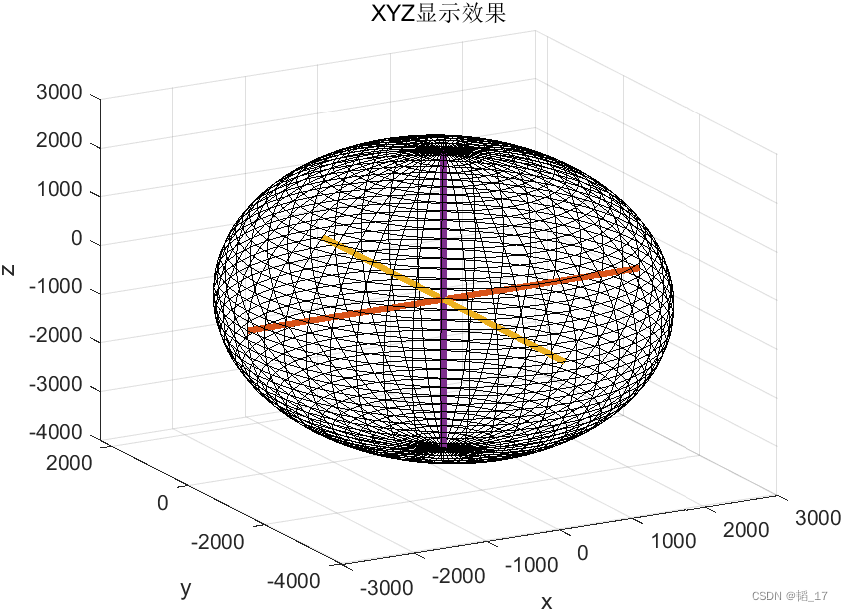
最终效果
相关文章:
RM3100 stm32驱动(硬件i2c)
目录 RM3100接线HAL库I2C函数HAL_I2C_Mem_ReadHAL_I2C_Mem_WriteHAL_I2C_Master_Transmit / HAL_I2C_Master_Receive例子 HSHAKE寄存器 cubemx配置RM3100寄存器驱动最终效果 RM3100接线 原理图 SA0 SA1接地,此时i2c设备地址为0100000,即0x20 如果SA0接…...
视觉学习(7) —— 接收数据和发送数据以及全局变量和浮点数
1、前提 创建一个四个字节的地址 2、发送数据 (1)直接发送数据 再观察地址里的值 与我们想要值不一样 输入0,而实际值则为 结论:直接输入值到地址,值会发生变化 (2)走全局变量发送数据 添加全…...
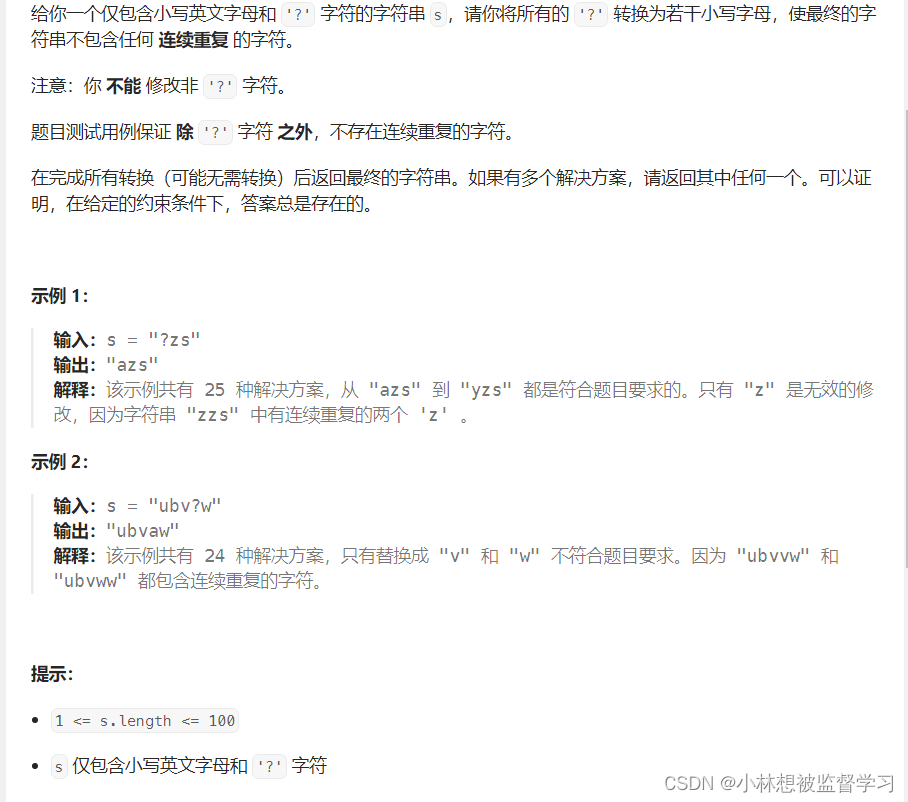
leetcode 1576. 替换所有的问号(easy)(优质解法)
链接:1576. 替换所有的问号 代码: class Solution {public String modifyString(String s) {char[] charSs.toCharArray();int lengthcharS.length;//遍历找到 ?for(int i0;i<length;i){if(charS[i]?){//遍历 a ~ z 选择一个合适的字符来…...

Advanced IP Scanner - 网络扫描器
Advanced IP Scanner - 网络扫描器 1. Advanced IP ScannerReferences https://www.advanced-ip-scanner.com/cn/ 可靠且免费的网络扫描器可以分析 LAN。该程序可扫描所有网络设备,使您能够访问共享文件夹和 FTP 服务器,(通过 RDP 和 Radmin) 远程控制…...

搜索百度百科官方创建入口,怎么创建更新公司的百度百科词条呢?
在百度搜索百度百科找到百度百科官方创建入口,可以上传并创建公司类的百度百科词条,创建词条后还可以再修改更新百科词条,最终完善好的百度百科词条将会在百度上获得大量曝光。那么百度百科可以怎么创建,下面洛希爱做百科网把十多…...
大数据与人工智能|全面数字化战略与企业数字化转型(第1节 )
要点一:培养跨学科思维 在分析时,需要采用多学科的思维方式 结果不重要,重要的是如何提炼现象、分析问题和得出结论的过程。 1. 介绍了锤子精神和多学科思维方式的重要性。指出了只从自身学科出发解决问题的局限性。 2. 提倡跨学科思维方式&a…...

【四】【C语言\动态规划】地下城游戏、按摩师、打家劫舍 II,三道题目深度解析
动态规划 动态规划就像是解决问题的一种策略,它可以帮助我们更高效地找到问题的解决方案。这个策略的核心思想就是将问题分解为一系列的小问题,并将每个小问题的解保存起来。这样,当我们需要解决原始问题的时候,我们就可以直接利…...

【大数据存储与处理】开卷考试总复习笔记
文章目录 实验部分一、 HBase 的基本操作1. HBase Shell入门2. HBase创建数据库表3. HBase数据操作4. HBase删除数据库表5. HBase Python基本编程 before二、 HBase 过滤器操作1.创建表和插入数据2.行键过滤器3.列族与列过滤器4.值过滤器5.其他过滤器6.python hbase 过滤器编程…...
)
HTML 实操试题(一)
创建一个包含标题、段落和链接的基本HTML文档: <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><ti…...
)
创龙瑞芯微RK3568设备树1(修改设备树GPIO和串口)
前言 最近一直在搞3568的东西,涉及到底层的设备树修改,驱动编写等等,忙的焦头烂额的,也没时间往下面写东西了。今天差不多底层的东西快弄完了,把最近的感悟给大家分享下,并且加入点设备树的基础知识。给刚刚…...

R语言【dplyr】——filter保留符合筛选条件的行,以数据的行为单位,创建子集
Package dplyr version 1.1.4 Parameters filter(.data, ..., .by NULL, .preverse FALSE) 参数【.data】:一个数据集(data frame),数据集扩展(比如:tibble),或者 lazy data fra…...
几种串口扩展电路
一、IIC串口扩展电路 LCT200 是一款可以通过 I2C 接口通讯,拓展 2 路独立串口的通讯芯片,同时也支持通过 2 路串口读写 I2C 接口的数据。LCT200 的封装为 TSSOP-20。 主要功能:⚫ 通过对 I2C 接口读写实现拓展 2 路独立串口功能 ⚫ 通过读写…...

实战10 角色管理
目录 1、角色后端接口 2、角色列表查询 2.1 效果图 2.2页面原型代码 2.3 角色api代码 role.js 2.4 查询角色列表代码 4、 新增和编辑角色 5、删除角色 6、分配权限 6.1 分配权限思路 6.2 分配权限回显接口 6.3 分配权限回显前端实现 6.4分配权限后端接口 6.4.1 R…...

Lua的底层原理与C#交互原理浅析【更新中】
目录 lua底层原理浅析 table底层原理浅析 Lua表的C语言定义 原理和实现 userdata lua和C#的交互机制(更新中) 基本介绍 Lua 与 C/C 的数据交互 Lua 调用 C/C 函数 C/C 调用 Lua 函数 基元类型传递 对象类型传递 Lua 调用 C# 总结 网上有很…...

鸿蒙项目二—— 注册和登录
此部分和上篇文章是连续剧 ,如果需要,请查看 一、注册 import http from ohos.net.http; Entry Component struct Reg {// 定义数据:State username: string "";State userpass: string "";State userpass2: string …...
Dijkstra(迪杰斯特拉)算法总结
知识概览 Dijkstra算法适用于解决所有边权都是正数的最短路问题。Dijkstra算法分为朴素的Dijkstra算法和堆优化版的Dijkstra算法。朴素的Dijkstra算法时间复杂度为,适用于稠密图。堆优化版的Dijkstra算法时间复杂度为,适用于稀疏图。稠密图的边数m和是一…...

设计模式?!
如何解决复杂性 链接:不同的设计模式实例代码(更新中) 分解 人们面对复杂性有一个常见的做法:即分而治之,将大问题分解为多个小问题,将复杂问题分解为多个简单问题。 抽象 更高层次来讲,人们处…...

Pytorch项目,肺癌检测项目之三
成功获取到数据之后,我们需要将数据放到Pytorch里面去处理,我们需要将其转换成Dataset数据集,方便去使用相同的API。要转换成Dataset数据集需要实现两个方法,方法一: 方法二: 运行比较慢的话,…...
深圳鼎信|输电线路防山火视频监控预警装置:森林火灾来袭,安全不留白!
受线路走廊制约和环保要求影响,输电线路大多建立在高山上,不仅可以减少地面障碍物和人类活动的干扰,还能提高线路的抗灾能力和可靠性。但同时也会面临其它的难题,例如森林火灾预防。今天,深圳鼎信智慧将从不同角度分析…...

【Bash/Shell】知识总结
文章目录 1. 总体认识1.1. Shell概述1.2. 第一个Shell脚本1.3. 注释 2. 变量2.1. 定义变量2.2. 使用变量2.3. 只读变量2.4. 删除变量2.5. 变量类型2.5.1. 字符串变量2.5.2. 整数变量2.5.3. 数组变量2.5.4. 环境变量2.5.5. 特殊变量 3. 输出3.1. echo命令3.2. printf命令 4. 运算…...

phpenv终极指南:5分钟掌握PHP多版本管理的完整解决方案
phpenv终极指南:5分钟掌握PHP多版本管理的完整解决方案 【免费下载链接】phpenv Simple PHP version management 项目地址: https://gitcode.com/gh_mirrors/ph/phpenv 还在为不同PHP项目间的版本冲突而烦恼吗?phpenv为您提供了一站式PHP版本管理…...

3分钟掌握UnityPackage Extractor:无需Unity轻松提取资源包
3分钟掌握UnityPackage Extractor:无需Unity轻松提取资源包 【免费下载链接】unitypackage_extractor Extract a .unitypackage, with or without Python 项目地址: https://gitcode.com/gh_mirrors/un/unitypackage_extractor 你是否曾因需要查看Unity资源包…...

用Sunshine搭建私人游戏串流服务器:从零到畅玩的完整指南
用Sunshine搭建私人游戏串流服务器:从零到畅玩的完整指南 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否想过将高性能游戏电脑变成随时可用的云游戏服务器&…...

避坑指南:VMware安装RockyLinux后网络不通、SSH连不上的常见问题排查与修复
Rocky Linux虚拟机网络故障排查实战指南 当你满怀期待地在VMware中安装好Rocky Linux,准备大展拳脚时,却发现网络连接失败、SSH无法访问——这种挫败感我深有体会。本文将带你直击问题核心,用系统化的排查思路解决这些"安装后困境"…...

拒绝“拍脑袋“备货:武汉丝路云如何利用Flink实时计算打造跨境供应链的“数据大脑“?
前言 在之前的文章中(如《揭秘跨境供应链的高并发架构》),我们探讨了如何通过微服务架构保证系统在"黑五"大促时不崩溃。但很多客户反馈了一个更深层的问题: "系统确实不崩了,但库存还是积压。要么备货…...

科研学术篇---论文搜索方法
高效搜集和研读论文,是构建扎实知识体系的基石。要想做到“高效”与“高质”并重,需要把整个过程当作一个闭环系统来优化——从目标锁定、来源筛选、检索策略,到快速粗筛、深度内化、持续追踪,每一步都有对应的工具和心法。下面逐…...

APK Installer终极指南:在Windows上轻松安装Android应用的完整解决方案
APK Installer终极指南:在Windows上轻松安装Android应用的完整解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经想在Windows电脑上运行An…...

手把手教你创建CST自定义材料:以吸波材料为例,导入厂家S参数曲线
手把手教你创建CST自定义材料:以吸波材料为例,导入厂家S参数曲线 在电磁仿真领域,材料参数的精确建模往往是决定仿真结果可靠性的关键因素。当我们需要模拟特殊频段的吸波材料、频率色散介质或各向异性材料时,仅依赖CST内置材料库…...

vscode过滤文件
const fs require(fs); const { exec } require(child_process);// 在这里输入你的关键词,每行一个 const keywordsStr BV1wmXwBCEsZ BV1MR6wBREhY BV1DuoSYuEpX ; // // 将多行字符串按换行符分割,过滤掉空行 const keywords keywordsStr.trim()…...

Excel MCP Server终极指南:5步实现无Excel环境下的Excel文件操作
Excel MCP Server终极指南:5步实现无Excel环境下的Excel文件操作 【免费下载链接】excel-mcp-server A Model Context Protocol server for Excel file manipulation 项目地址: https://gitcode.com/gh_mirrors/ex/excel-mcp-server Excel MCP Server是一个基…...