边缘检测——PidiNet网络训练自己数据集并优化推理测试(详细图文教程)
PiDiNet 是一种用于边缘检测的算法,它提出了一种简单、轻量级但有效的架构。PiDiNet 采用了新
颖的像素差卷积,将传统的边缘检测算子集成到现代 CNN 中流行的卷积运算中,以增强任务性能。
在 BSDS500、NYUD 和 Multicue 上进行了大量的实验,以证明其有效性、高训练和推理效率。
目录
- 一、源码包
- 二、数据集准备
- 三、训练
- 3.1 训练和测试命令
- 3.1 模型保存
- 四、测试
- 4.1 测试结果
- 4.1.1 测试场景1
- 4.1.2 测试场景2
- 4.1.3 测试场景3
- 4.2 检测边缘与原图融合
- 4.2.1 融合代码
- 4.2.2 融合结果展示
- 4.2.1 场景1
- 4.2.2 场景2
- 五、模型优化
- 5.1 修改通道数和空洞率
- 5.2 裁剪卷积层
- 六、推理速度
- 总结
一、源码包
我自己在官网源码包的基础上改过一些代码,我提供的源码包中新增了网络裁剪优化,CPU推理测试代码,边缘检测图与原图融合等代码,也包含了训练集,推荐学者下载我提供的源码包使用。
官网地址:PidiNet
我提供的源码包下载链接:网盘链接,提取码:kmxb
论文地址:论文
我提供的源码包解压后的样子如下:
二、数据集准备
增强的数据集有BSD 500、PASCAL VOC和NYUD,下载链接见下,直接将链接复制到迅雷里面下载,速度很快。在我提供的源码包中有BSD 500数据集,位于目录pidinet\path\to中,如下:
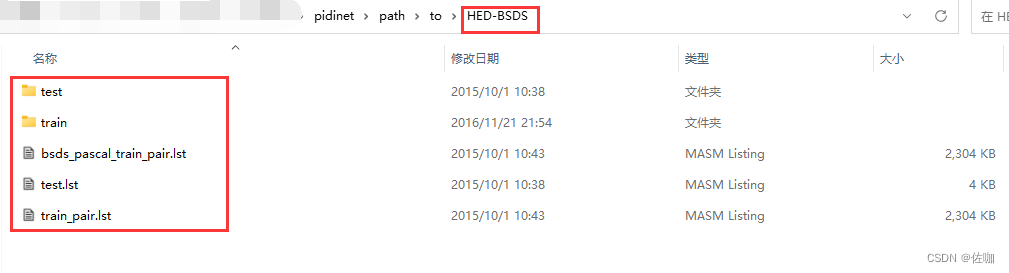
有自己制作好数据集的,直接导入使用。
BSD 500数据集下载链接: http://mftp.mmcheng.net/liuyun/rcf/data/HED-BSDS.tar.gz
PASCAL VOC数据集下载链接: http://mftp.mmcheng.net/liuyun/rcf/data/PASCAL.tar.gz
NYUD数据集下载链接 http://mftp.mmcheng.net/liuyun/rcf/data/NYUD.tar.gz

三、训练
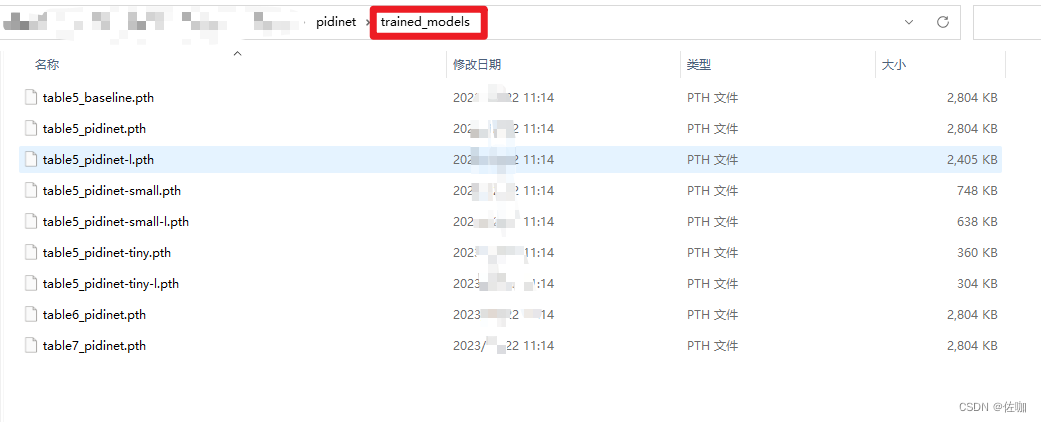
有多种可以选择,官网提供的如下:

其中效果最好的是table7_pidinet,最轻量化的是table5_pidinet-tiny-l,学者根据自己需求选择模型大小,上图像的各个模型权重文件在源码包中trained_models文件夹下,可以直接用这些权重文件测试。
3.1 训练和测试命令
下面是各个模型对应的训练和测试命令:
############### Table 5, Baseline
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet --config baseline --sa --dil --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_baseline --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_baseline.pth# generate maps (no need to convert because baseline is already a vanilla cnn)
python main.py --model pidinet --config baseline --sa --dil -j 4 --gpu 0 --savedir /path/to/table5_baseline --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_baseline.pth# 101 FPS
python throughput.py --model pidinet --config baseline --sa --dil -j 1 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 5, PiDiNet
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet --config carv4 --sa --dil --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_pidinet --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_pidinet.pth# generate maps with converted pidinet
python main.py --model pidinet_converted --config carv4 --sa --dil -j 4 --gpu 0 --savedir /path/to/table5_pidinet --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_pidinet.pth --evaluate-converted# 96 FPS
python throughput.py --model pidinet_converted --config carv4 --sa --dil -j 1 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 5, PiDiNet-L
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet --config carv4 --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_pidinet-l --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_pidinet-l.pth# generate maps with converted pidinet
python main.py --model pidinet_converted --config carv4 -j 4 --gpu 0 --savedir /path/to/table5_pidinet-l --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_pidinet-l.pth --evaluate-converted# 135 FPS
python throughput.py --model pidinet_converted --config carv4 -j 1 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 5, PiDiNet-small
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet_small --config carv4 --sa --dil --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_pidinet-small --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_pidinet-small.pth# generate maps with converted pidinet
python main.py --model pidinet_small_converted --config carv4 --sa --dil -j 4 --gpu 0 --savedir /path/to/table5_pidinet-small --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_pidinet-small.pth --evaluate-converted# 161 FPS
python throughput.py --model pidinet_small_converted --sa --dil --config carv4 -j 1 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 5, PiDiNet-small-l
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet_small --config carv4 --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_pidinet-small-l --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_pidinet-small-l.pth# generate maps with converted pidinet
python main.py --model pidinet_small_converted --config carv4 -j 4 --gpu 0 --savedir /path/to/table5_pidinet-small-l --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_pidinet-small-l.pth --evaluate-converted# 225 FPS
python throughput.py --model pidinet_small_converted --config carv4 -j 2 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 5, PiDiNet-tiny
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet_tiny --config carv4 --sa --dil --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_pidinet-tiny --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_pidinet-tiny.pth# generate maps with converted pidinet
python main.py --model pidinet_tiny_converted --config carv4 --sa --dil -j 4 --gpu 0 --savedir /path/to/table5_pidinet-tiny --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_pidinet-tiny.pth --evaluate-converted# 182 FPS
python throughput.py --model pidinet_tiny_converted --sa --dil --config carv4 -j 2 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 5, PiDiNet-tiny-l
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet_tiny --config carv4 --resume --iter-size 24 -j 4 --gpu 0 --epochs 20 --lr 0.005 --lr-type multistep --lr-steps 10-16 --wd 1e-4 --savedir /path/to/table5_pidinet-tiny-l --datadir /path/to/BSDS500 --dataset BSDS #--evaluate /path/to/table5_pidinet-tiny-l.pth# generate maps with converted pidinet
python main.py --model pidinet_tiny_converted --config carv4 -j 4 --gpu 0 --savedir /path/to/table5_pidinet-tiny-l --datadir /path/to/BSDS500 --dataset BSDS --evaluate /path/to/table5_pidinet-tiny-l.pth --evaluate-converted# 253 FPS
python throughput.py --model pidinet_tiny_converted --config carv4 -j 2 --gpu 0 --datadir /path/to/BSDS500 --dataset BSDS############### Table 6, PiDiNet
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet --config carv4 --sa --dil --resume --iter-size 24 -j 4 --gpu 0 --epochs 14 --lr 0.005 --lr-type multistep --lr-steps 8-12 --wd 1e-4 --savedir /path/to/table6_pidinet --datadir /path/to/NYUD --dataset NYUD-image --lmbda 1.3 #--evaluate /path/to/table6_pidinet.pth# generate maps with converted pidinet
python main.py --model pidinet_converted --config carv4 --sa --dil -j 4 --gpu 0 --savedir /path/to/table6_pidinet --datadir /path/to/NYUD --dataset NYUD-image --lmbda 1.3 --evaluate /path/to/table6_pidinet.pth --evaluate-converted# 66 FPS
python throughput.py --model pidinet_converted --sa --dil --config carv4 -j 1 --gpu 0 --datadir /path/to/NYUD --dataset NYUD-image############### Table 7, PiDiNet
# train, or generate maps without conversion (uncomment the --evaluate)
python main.py --model pidinet --config carv4 --sa --dil --resume --iter-size 24 -j 4 --gpu 0 --epochs 14 --lr 0.005 --lr-type multistep --lr-steps 8-12 --wd 1e-4 --savedir /path/to/table7_pidinet --datadir /path/to/Multicue/multicue_v2 --dataset Multicue-boundary-1 #--evaluate /path/to/table7_pidinet.pth# generate maps with converted pidinet
python main.py --model pidinet_converted --config carv4 --sa --dil -j 4 --gpu 0 --savedir /path/to/table7_pidinet --datadir /path/to/Multicue/multicue_v2 --dataset Multicue-boundary-1 --evaluate /path/to/table7_pidinet.pth --evaluate-converted# 17 FPS
python throughput.py --model pidinet_converted --sa --dil --config carv4 -j 1 --gpu 0 --datadir /path/to/Multicue/multicue_v2 --dataset Multicue-boundary-1
各个模型的定义,在代码中的位置如下:
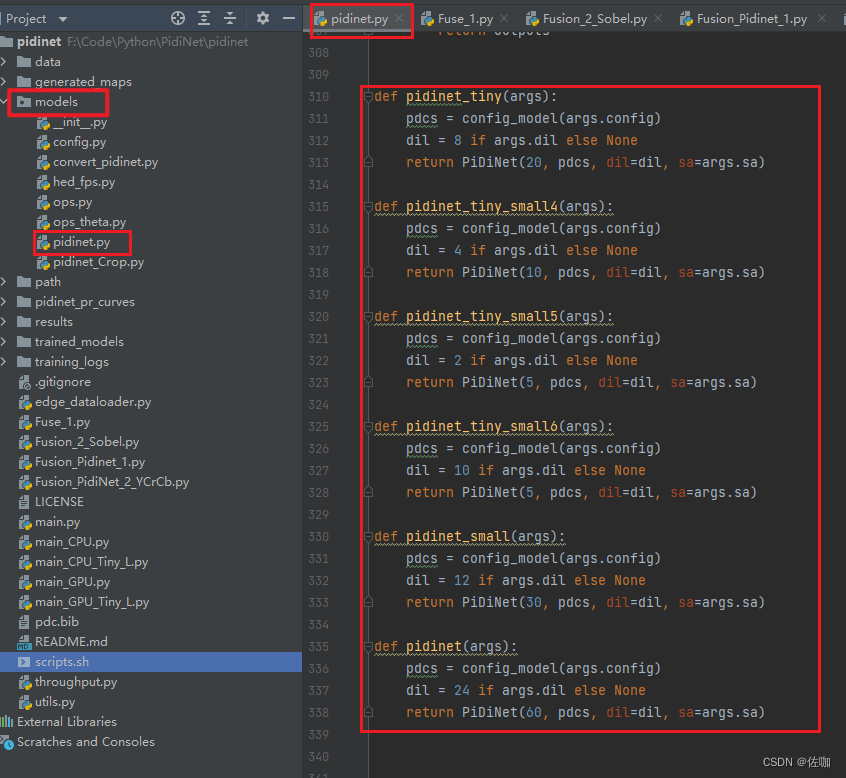
实际训练使用,只需要将修改训练命令中模型保存路径:–savedir;数据集路径:–dataset
具体使用如下,在终端输入命令,下面就是训练过程:
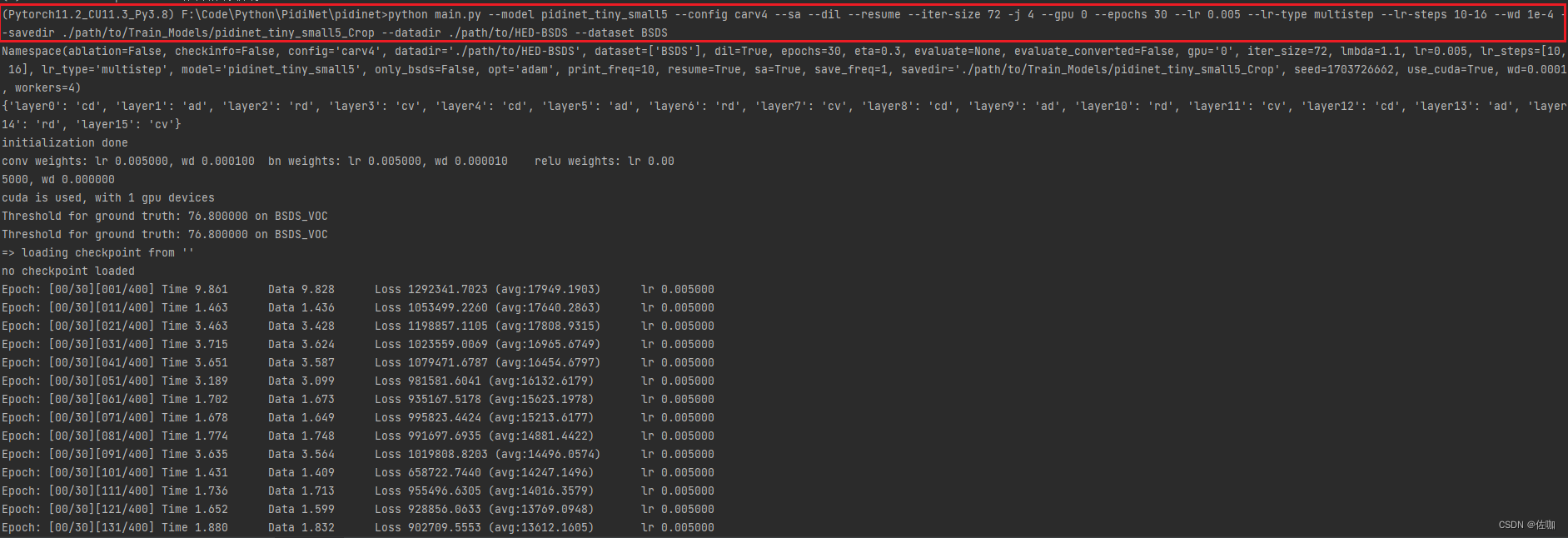
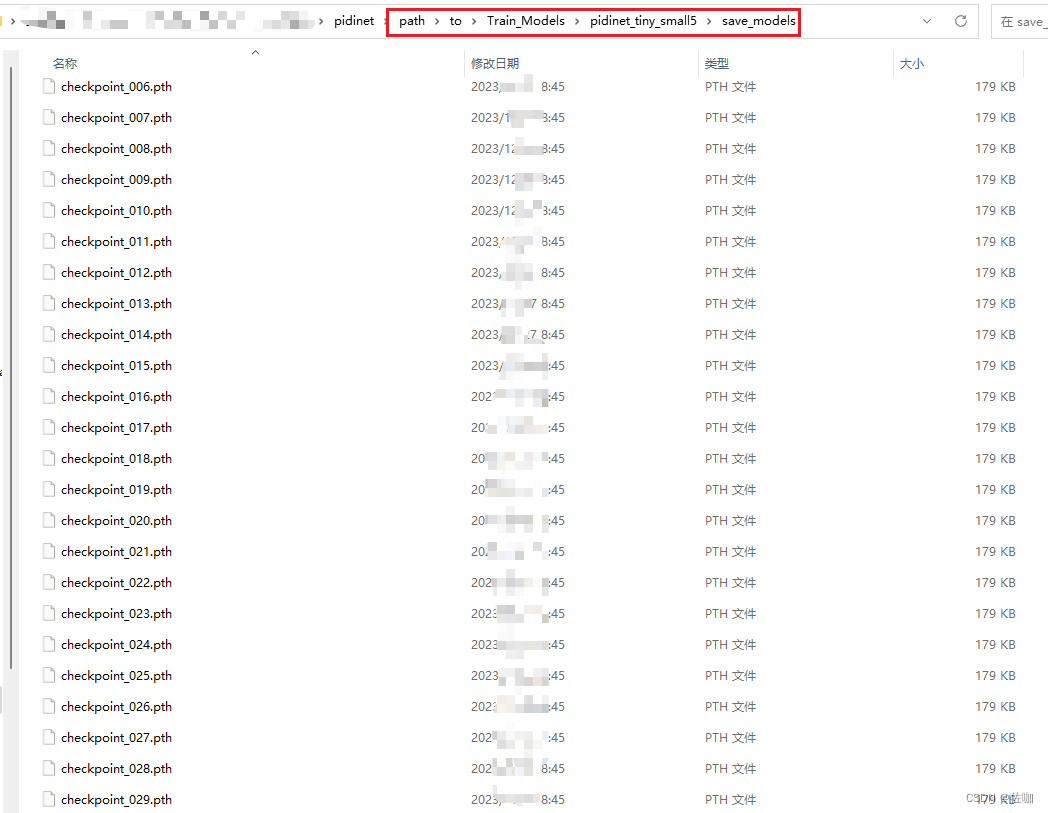
3.1 模型保存
训练好的模型会自动保存指定路径下:
四、测试
各个模型对应的测试命令见上面3.1。
在我提供的源码包中,单独区分了GPU测试脚本和CPU测试脚本,如下:
使
用测试命令时要修改读入测试集的路径:–datadir;保存测试结果的路径:–savedir;训练好的模型权重路径:–evaluate。其它的参数可以根据情况调整。
GPU测试命令例子如下:
python main_GPU.py --model pidinet_converted --config carv4 --sa --dil -j 4 --gpu 0 --savedir ./path/to/savedir_table7_pidinet --datadir ./path/to/custom_images --dataset Custom --evaluate ./trained_models/table5_baseline.pth --evaluate-converted
CPU测试命令例子如下:
python main_CPU.py --model pidinet_tiny_converted_small5 --config carv4 --sa --dil -j 4 --savedir ./results/pidinet_tiny_small5_Crop --datadir ./path/to/custom_images --dataset Custom --evaluate ./path/to/Train_Models/pidinet_tiny_small5_Crop/save_models/checkpoint_008.pth --evaluate-converted
下面是终端中输入命令实际测试的过程:
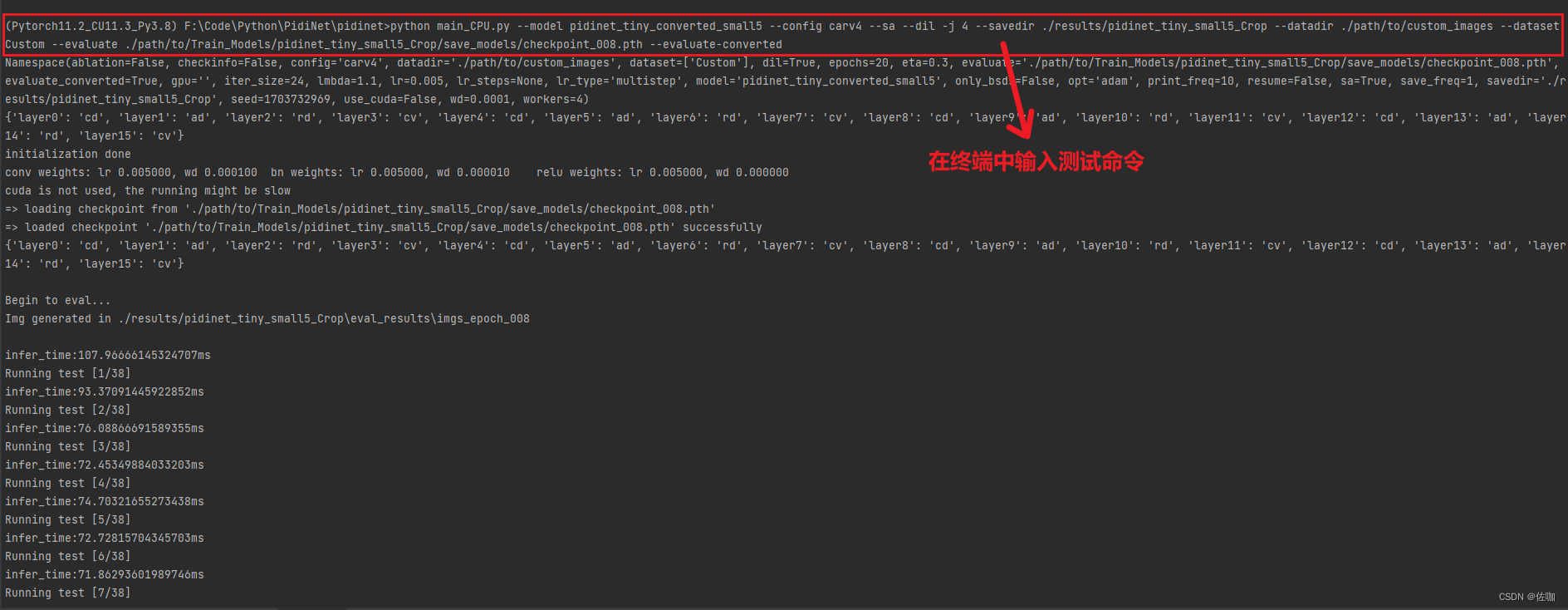
最终的测试结果会自动保存在–savedir指定的路径中,如下:
4.1 测试结果
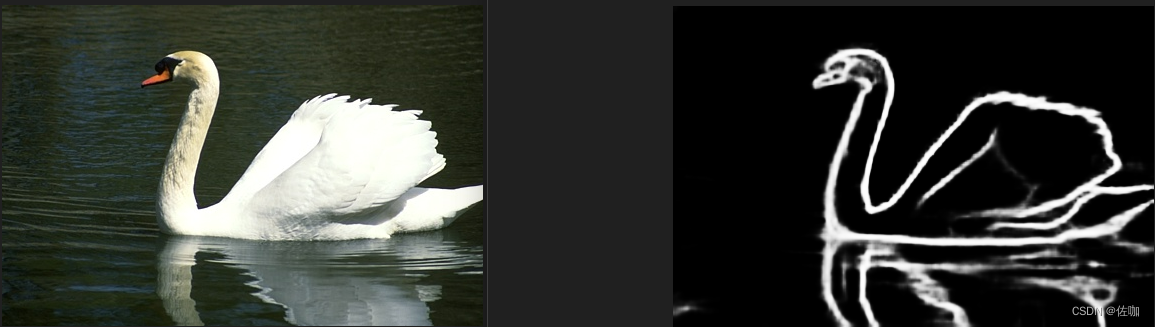
4.1.1 测试场景1

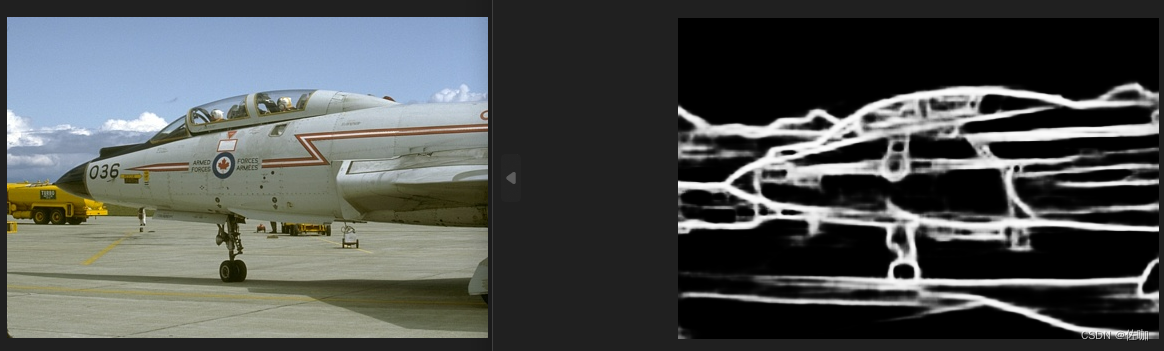
4.1.2 测试场景2

4.1.3 测试场景3


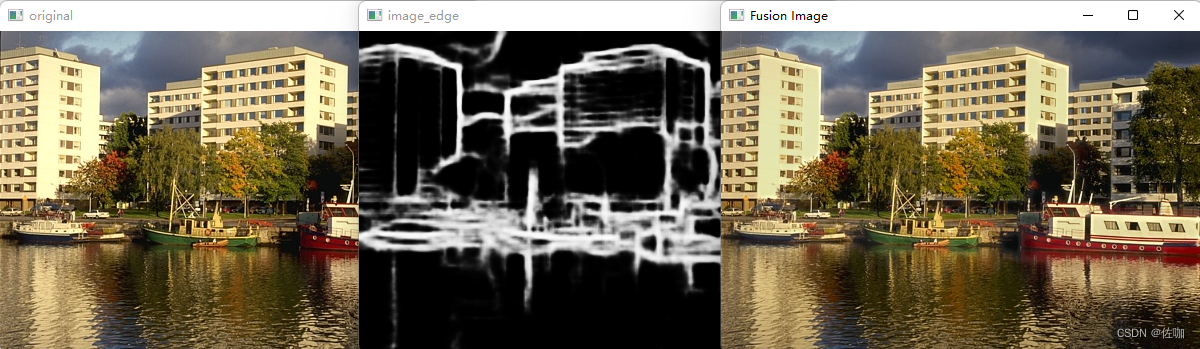
4.2 检测边缘与原图融合
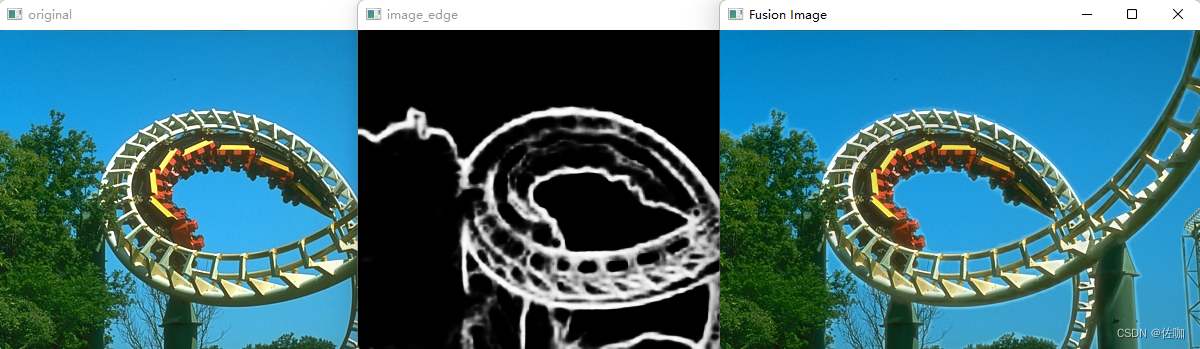
融合方法是先单独在Y通道上对原图和边缘图进行叠加融合,最后用融合后的Y通道和原图图的Cr,Cb合并,再转为BGR图像。用这样的融合方法得到的图像比较自然,色彩信息不会丢失。
4.2.1 融合代码
# 此方法可行,在Y通道上将图像的细节融合后再与CrCb色彩通道合并颜色import cv2
import numpy as np# 读取原始图像image = cv2.imread('path/to/DenoiseImages/23.jpg', cv2.IMREAD_COLOR) # 原图image_edge = cv2.imread("results/Table_pidinet_tiny_l/eval_results/imgs_epoch_019/23.png") # 边缘图像# 转YCrCb图像
image_YCrCb = cv2.cvtColor(image,cv2.COLOR_BGR2YCrCb)
image_edge_YCrCb = cv2.cvtColor(image_edge,cv2.COLOR_BGR2YCrCb)# 拆分YCRCb图像各个通道image_y,image_cr,image_cb = cv2.split(image_YCrCb)image_edge_y,image_edge_cr,image_edge_cb = cv2.split(image_edge_YCrCb)# 将边缘图像转换为彩色图像
# edge_image_color = cv2.cvtColor(image_edge, cv2.COLOR_GRAY2BGR)# 将边缘图像叠加到原始图像上
enhanced_image_y = cv2.addWeighted(image_y, 0.9, image_edge_y, 0.1, 0)# 合同通道
fusion_YCrCb = cv2.merge((enhanced_image_y,image_cr,image_cb))# YCrCb转BGR
fusion_BGR = cv2.cvtColor(fusion_YCrCb,cv2.COLOR_YCrCb2BGR)cv2.imwrite("results/DenoiseImages+Table_pidinet_tiny_l/23.bmp",fusion_BGR)# fusion_RGB = cv2.cvtColor(fusion_YCrCb,cv2.COLOR_YCrCb2RGB)# 显示增强后的图像
cv2.imshow("original",image)
cv2.imshow("image_edge",image_edge)
cv2.imshow('image_y',image_y)
cv2.imshow('image_edge_y',image_edge_y)
cv2.imshow('enhanced_image_y',enhanced_image_y)
cv2.imshow('Fusion Image', fusion_BGR)
cv2.waitKey(0)
cv2.destroyAllWindows()
4.2.2 融合结果展示
4.2.1 场景1
4.2.2 场景2
五、模型优化
官网已经提供了多种模型,但是在CPU上还是远远不够,所以我的优化主要是针对速度。
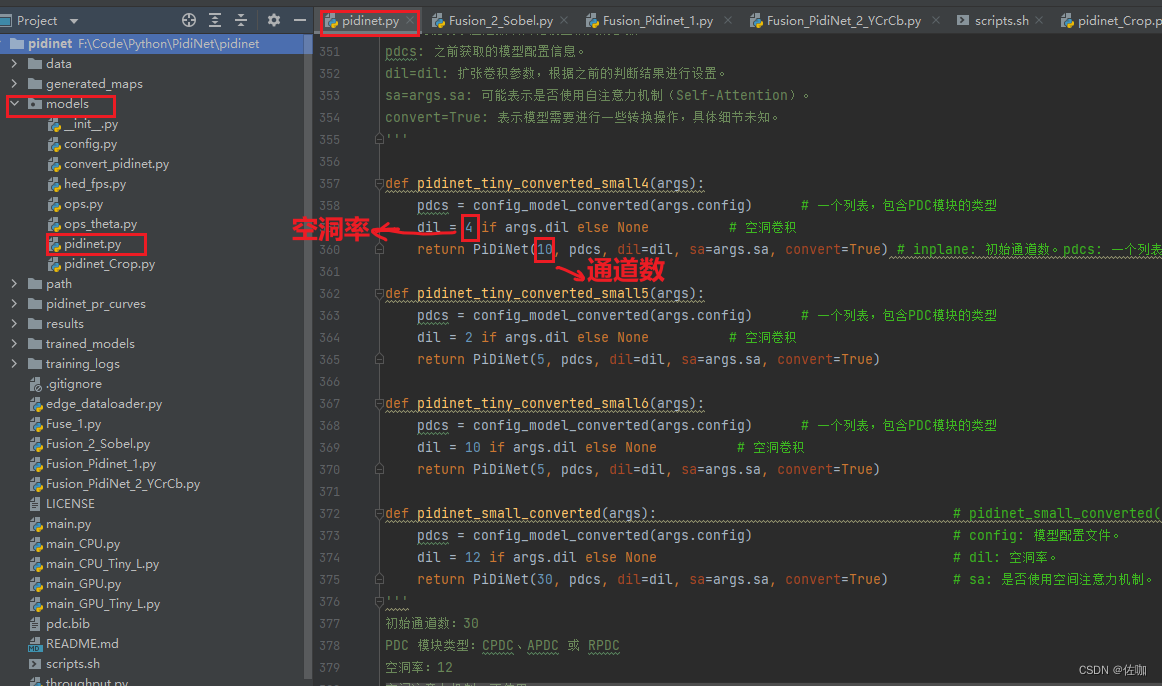
5.1 修改通道数和空洞率
我最小的通道数为5,空洞率为2。其它值也可以设置,检测效果会有影响。
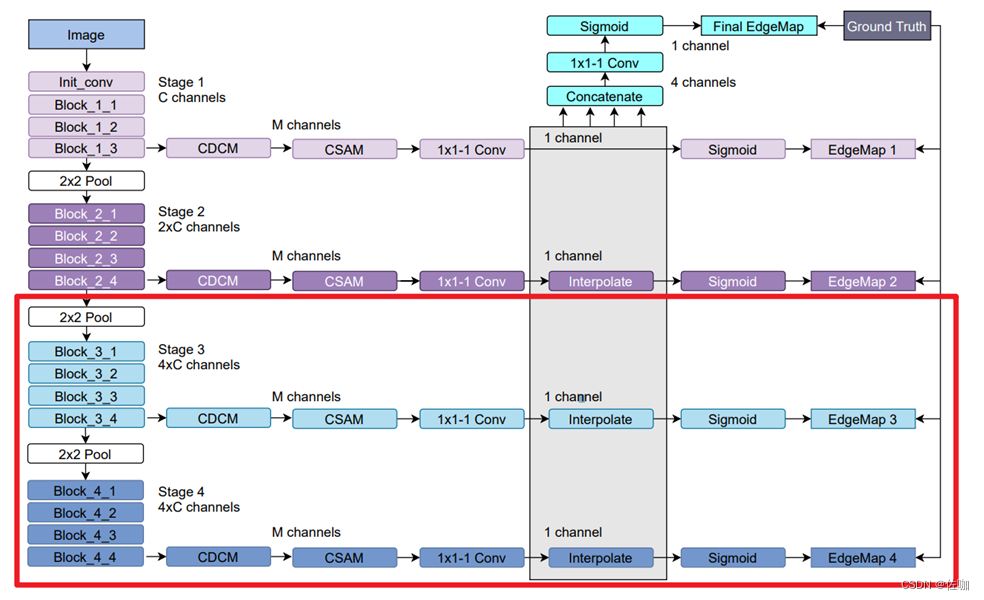
5.2 裁剪卷积层
我裁剪网络结构的部分如下图红框所示,裁剪代码脚本为源码包中的pidinet_Crop.py文件。
对应的源码里面将block_3部分和block_4部分删除,同时forword里面也要对应修改,如下:
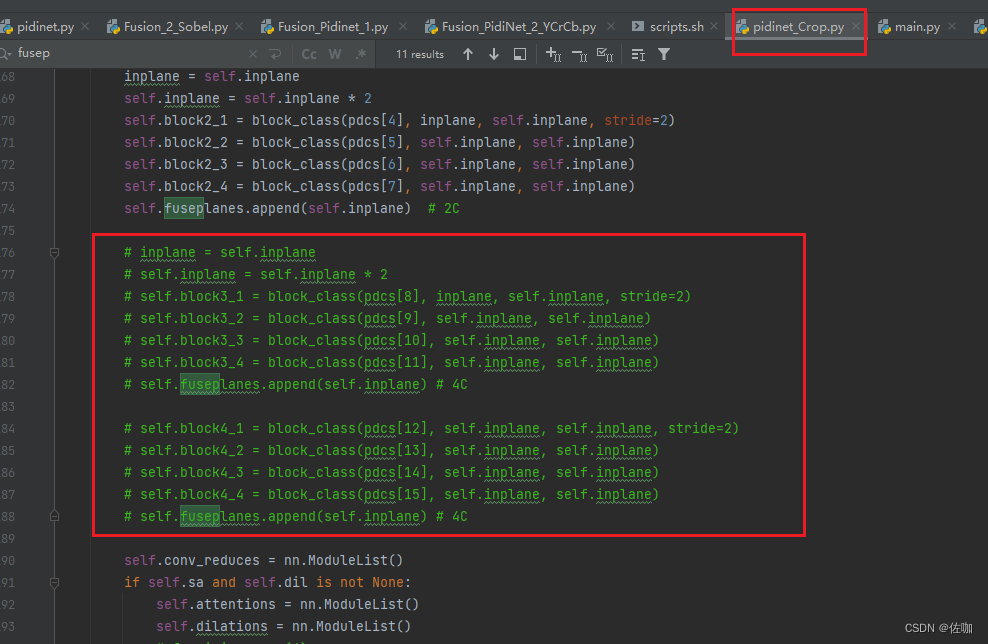

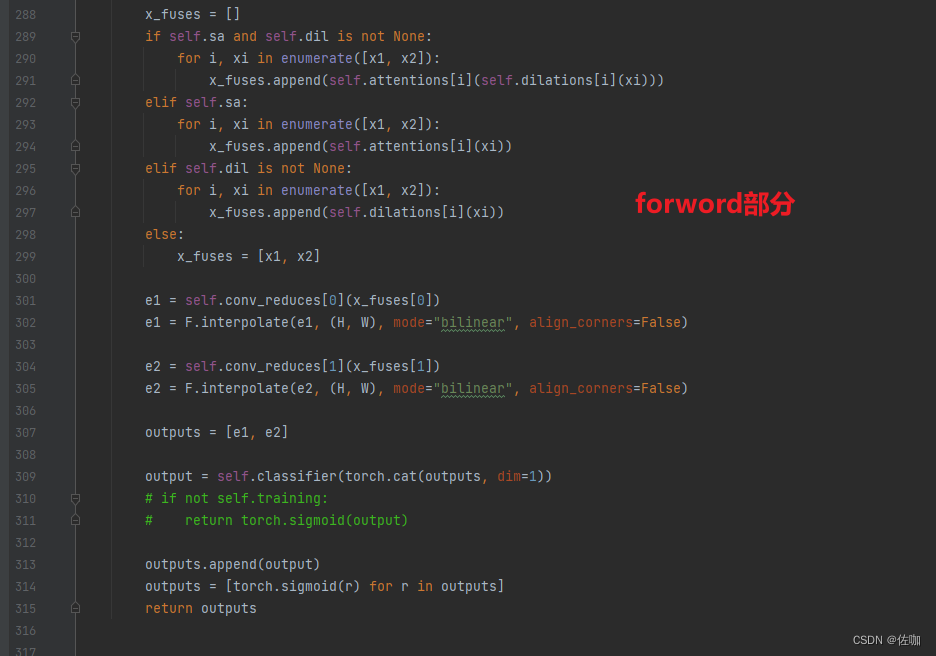
通过这种方法能够提升一定速度,但是检测效果差了很多。
六、推理速度
我自己测试的图像分辨率为480*360,电脑处理器:12th Gen Intel® Core™ i7-12700H 2.30 GHz。
官网table7_pidinet模型大小为2.73M。 CPU推理速度:450ms/fps,GPU推理速度:4ms/fps。
官网table5-pidinet-tiny-l模型大小为304K。CPU推理速度:143.6ms/fps,GPU推理速度:2ms/fps。
模型优化,裁剪通道数为5,空洞率为2,模型大小为:178K。 CPU推理速度:81ms/fps。
模型优化,卷积层裁剪部分如下图红框所示,通道数为5,空洞率为2,模型大小为:65.06K。CPU推理速度:72.25ms/fps。
总结
以上就是边缘检测算法PidiNet网络训练自己数据集并优化推理测试的详细图文教程,该网络架构都是采用轻量化的模块集成,确实快,但依然有优化空间,有更深入研究的学者欢迎一起探讨。
总结不易,多多支持,谢谢!
相关文章:
边缘检测——PidiNet网络训练自己数据集并优化推理测试(详细图文教程)
PiDiNet 是一种用于边缘检测的算法,它提出了一种简单、轻量级但有效的架构。PiDiNet 采用了新 颖的像素差卷积,将传统的边缘检测算子集成到现代 CNN 中流行的卷积运算中,以增强任务性能。 在 BSDS500、NYUD 和 Multicue 上进行了大量的实验…...

SpringBoot整合Mybatis遇到的常见问题及解决方案
大家好,我是升仔 一、背景 SpringBoot与Mybatis的整合是Java开发中常见的实践,用于简化数据库操作。然而,在整合过程中,开发者可能会遇到各种问题,影响开发效率和应用性能。 二、具体问题及解决方案 问题࿱…...
【10】ES6:Promise 对象
一、同步和异步 1、JS 是单线程语言 JavaScript 是一门单线程的语言,因此同一个时间只能做一件事情,这意味着所有任务都需要排队,前一个任务执行完,才会执行下一个任务。但是,如果前一个任务的执行时间很长ÿ…...
)
Hive和Spark生产集群搭建(spark on doris)
1.环境准备 1.1 版本选择 序号bigdata-001bigdata-002bigdata-003bigdata-004bigdata-005MySQL-8.0.31mysqlDataxDataxDataxDataxDataxDataxSpark-3.3.1SparkSparkSparkSparkSparkHive-3.1.3HiveHive 1.2 主要组件官网 hive官网: https://hive.apache.org/ hive…...
VuePress、VuePress-theme-hope 搭建个人博客 1【快速上手】 —— 防止踩坑篇
vuePress官网地址 👉 首页 | VuePress 手动安装 这一章节会帮助你从头搭建一个简单的 VuePress 文档网站。如果你想在一个现有项目中使用 VuePress 管理文档,从步骤 3 开始。 步骤 1: 创建并进入一个新目录 mkdir vuepress-starter cd vuepress-star…...
数据类型-复合类型)
【PostgreSQL】从零开始:(三十一)数据类型-复合类型
复合类型 复合类型是一种由其他类型组成的类型。它可以是数组、结构体、联合体或指向这些类型的指针。复合类型允许将多个值组合成单个实体,以便更方便地处理和使用。复合类型在C语言中非常常见,用于表示复杂的数据结构和组织数据的方式。 数组是一种由…...
基于鸿蒙OS开发一个前端应用
创建JS工程:做鸿蒙应用开发到底学习些啥? 若首次打开DevEco Studio,请点击Create Project创建工程。如果已经打开了一个工程,请在菜单栏选择File > New > Create Project来创建一个新工程。选择HarmonyOS模板库,…...
PIC单片机项目(7)——基于PIC16F877A的智能灯光设计
1.功能设计 使用PIC16F877A单片机,检测环境关照,当光照比阈值低的时候,开灯。光照阈值可以通过按键进行设置,同时阈值可以保存在EEPROM中,断电不丢失。使用LCD1602进行显示,第一行显示测到的实时光照强度&a…...
Mysql For Navicate (老韩)
Navicate创建数据库 先创建一个数据库;然后在数据库中创建一张表;在表格当中填入相应的属性字段;打开表, 然后填入相应的实例字段; – 使用数据库图形化App和使用指令来进行操作各有各的好处和利弊; 数据库的三层结构(破除MySQL神秘) 所谓安装Mysql数据库, 就是在主机安装一…...

设计模式之-建造者模式通俗易懂理解,以及建造者模式的使用场景和示列代码
系列文章目录 设计模式之-6大设计原则简单易懂的理解以及它们的适用场景和代码示列 设计模式之-单列设计模式,5种单例设计模式使用场景以及它们的优缺点 设计模式之-3种常见的工厂模式简单工厂模式、工厂方法模式和抽象工厂模式,每一种模式的概念、使用…...

Redis分布式锁进阶源码分析
Redis分布式锁进阶源码分析 1、如何写一个商品秒杀代码?2、加上Java锁3、使用redis setnx命令获取锁4、增加try和finally5、给锁设置过期时间6、增长过期时间,并setnx增加唯一value7、使用redisson8、源码分析a、RedissonLock.tryLockInnerAsyncb、Redis…...
lag-llama源码解读(Lag-Llama: Towards Foundation Models for Time Series Forecasting)
Lag-Llama: Towards Foundation Models for Time Series Forecasting 文章内容: 时间序列预测任务,单变量预测单变量,基于Llama大模型,在zero-shot场景下模型表现优异。创新点,引入滞后特征作为协变量来进行预测。 获得…...

Three.js基础入门介绍——Three.js学习三【借助控制器操作相机】
在Three.js基础入门介绍——Three.js学习二【极简入门】中介绍了如何搭建Three.js开发环境并实现一个包含旋转立方体的场景示例,以此为前提,本篇将引进一个控制器的概念并使用”轨道控制器”(OrbitControls)来达到从不同方向展示场…...

【日志系列】什么是分布式日志系统?
✔️什么是分布式日志系统? 现在,很多应用都是集群部署的,一次请求会因为负载均衡而被路由到不同的服务器上面,这就导致一个应用的日志会分散在不同的服务器上面。 当我们要向通过日志做数据分析,问题排查的时候&#…...
[卷积神经网络]FCOS--仅使用卷积的Anchor Free目标检测
项目源码: FCOShttps://github.com/tianzhi0549/FCOS/ 一、概述 作为一种Anchor Free的目标检测网络,FCOS并不依赖锚框,这点类似于YOLOx和CenterNet,但CenterNet的思路是寻找目标的中心点,而FCOS则是寻找每个像素点&…...

Ubuntu fcitx Install
ubuntu经常出现键盘失灵的问题 查询资料得知应该是Ibus框架的问题 于是需要安装fcitx框架和搜狗拼音 sudo apt update sudo apt install fcitx 设置fcitx开机自启动(建议) sudo cp /usr/share/applications/fcitx.desktop /etc/xdg/autostart/ 然后…...

【Makefile/GNU Make】知识总结
文章目录 1. 总体认识2. 编写Makefile2.1. Makefile的组成2.2. Makefile文件名2.3. 包含其他Makefile 3. 编写规则4. 编写规则中的构建命令5. 如何使用变量6. 条件判断7. 转换文本的函数8. 如何运行make9. 使用模糊规则10. 使用make来更新存档文件11. 扩展GNU make12. 集成GNU …...
腾讯云轻量服务器和云服务器CVM该怎么选?区别一览
腾讯云轻量服务器和云服务器CVM该怎么选?不差钱选云服务器CVM,追求性价比选择轻量应用服务器,轻量真优惠呀,活动 https://curl.qcloud.com/oRMoSucP 轻量应用服务器2核2G3M价格62元一年、2核2G4M价格118元一年,540元三…...
MySQL定时备份实现
一、备份数据库 –all-databases 备份所有数据库 /opt/mysqlcopy/all_$(date “%Y-%m-%d %H:%M:%S”).sql 备份地址 docker exec -it 容器名称 sh -c "mysqldump -u root -ppassword --all-databases > /opt/mysqlcopy/all_$(date "%Y-%m-%d %H:%M:%S").sq…...
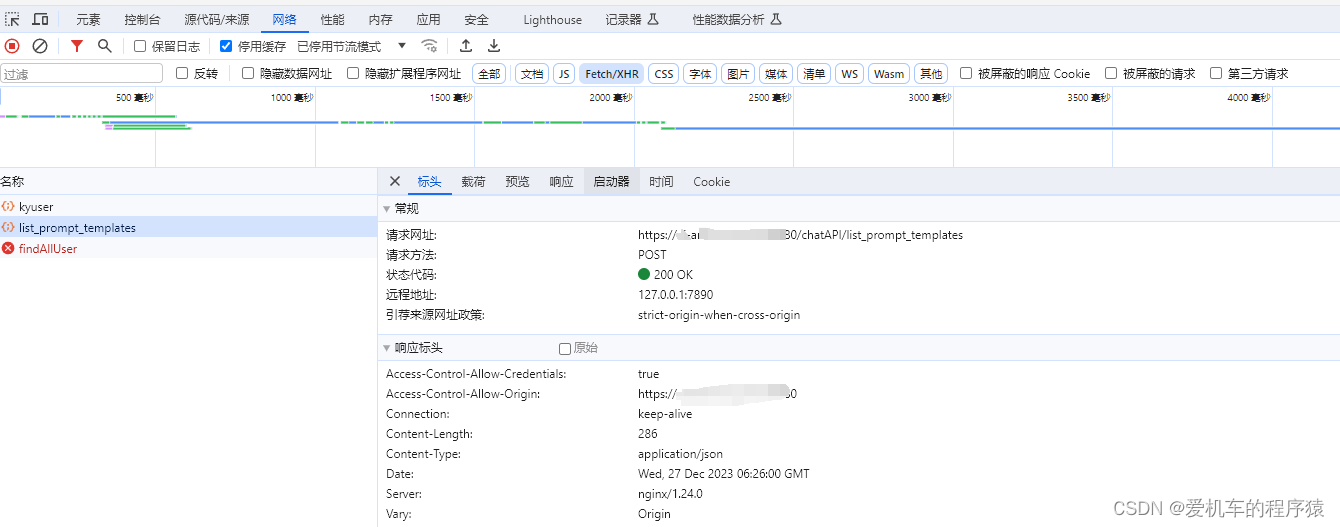
Nginx 不同源Https请求Http 报strict-origin-when-cross-origin
原因: nginx代理配置url指向只开放了/* 而我/*/*多了一层路径 成功:...

Taotoken的用量看板如何帮助团队清晰管理AI模型调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的用量看板如何帮助团队清晰管理AI模型调用成本 作为团队的技术负责人,我的一项重要职责是确保技术投入的每一…...

从三维点胶机到桌面雕刻机:一个STM32+FPGA运动控制核心板的复用实战
从三维点胶机到桌面雕刻机:STM32FPGA运动控制核心板的复用实战 在工业自动化设备开发领域,运动控制器的复用性与平台化设计正成为工程师们关注的焦点。当我们完成一款基于STM32FPGA架构的运动控制核心板开发后,如何快速将其适配到不同应用场景…...

对比软件模拟I2C:实测GD32F303硬件I2C读写AT24C02的性能与代码差异
硬件I2C与软件模拟I2C实战对比:以GD32F303驱动AT24C02为例 在嵌入式开发中,I2C总线因其简单的两线制结构和多主从设备支持特性,成为传感器、存储芯片等外设的常用接口。面对硬件I2C控制器和GPIO模拟两种实现方式,开发者常陷入选择…...

如何快速获取网易云和QQ音乐的精准LRC歌词?这款免费工具帮你一键搞定!
如何快速获取网易云和QQ音乐的精准LRC歌词?这款免费工具帮你一键搞定! 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为音乐播放器缺少歌词而…...

【Android】CloneTTS最强朗读听书引擎-可克隆一切音色
【Android】CloneTTS最强朗读听书引擎-可克隆一切音色 链接:https://pan.xunlei.com/s/VOsu4mh3O_d7zjeERkKPfcG4A1?pwddi3y# CloneTTS 是一款运行在安卓系统本地的文字转语音(TTS)原生引擎,允许用户离线克隆所需的声音并直接使用该声音来朗读书籍或长…...

多臂老虎机问题——一个面向初学者的指南
原文:towardsdatascience.com/the-multi-armed-bandit-problem-a-beginner-friendly-guide-2293ce7d8da8 多臂老虎机 (MAB) 是决策中的一个经典问题,其中代理必须在多个选项(称为“臂”)之间进行选择,并在一系列试验中…...

Arm硬件跟踪技术在嵌入式调试中的应用与优化
1. Arm Development Studio 跟踪技术深度解析在嵌入式系统开发领域,调试实时性要求高的系统一直是个棘手问题。传统断点调试会中断程序执行流,而日志输出又可能影响系统时序。Arm Development Studio提供的硬件跟踪技术完美解决了这一痛点——它能以纳秒…...

如何用Zotero Style插件让文献管理变得可视化与高效
如何用Zotero Style插件让文献管理变得可视化与高效 【免费下载链接】zotero-style Ethereal Style for Zotero 项目地址: https://gitcode.com/GitHub_Trending/zo/zotero-style 如果你正在寻找提升Zotero文献管理效率的终极解决方案,Zotero Style插件正是你…...

石榴石固态电解质表面再生:氧气处理与气氛控制的关键突破
1. 项目概述:破解石榴石固态电解质表面钝化的密码如果你正在研究或关注下一代高能量密度电池,那么对固态电解质(Solid Electrolyte, SE)一定不陌生。在众多候选者中,石榴石型固态电解质,特别是掺杂的LLZO&a…...

C语言实现终端菜单系统:从字符串解析到表驱动设计
1. 项目概述:为什么我们需要一个终端菜单系统?在嵌入式开发、服务器运维或者任何需要在纯命令行终端环境下工作的场景里,我们打交道最多的就是一个“黑框框”。这个黑框框,也就是终端,功能强大但交互原始。每次调试、测…...