大创项目推荐 深度学习卫星遥感图像检测与识别 -opencv python 目标检测
文章目录
- 0 前言
- 1 课题背景
- 2 实现效果
- 3 Yolov5算法
- 4 数据处理和训练
- 5 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 **深度学习卫星遥感图像检测与识别 **
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题背景
近年来,世界各国大力发展航空航天事业,卫星图像的目标检测在各行各业的应用得到了快速的发展,特别是军事侦查、海洋船舶和渔业管理等领域。由于卫星图像中有价值的信息极少,卫星图像数据规模巨大,这迫切需要智能辅助工具帮助相关从业人员从卫星图像中高效获取精确直观的信息。
本文利用深度学习技术,基于Yolov5算法框架实现卫星图像目标检测问题。
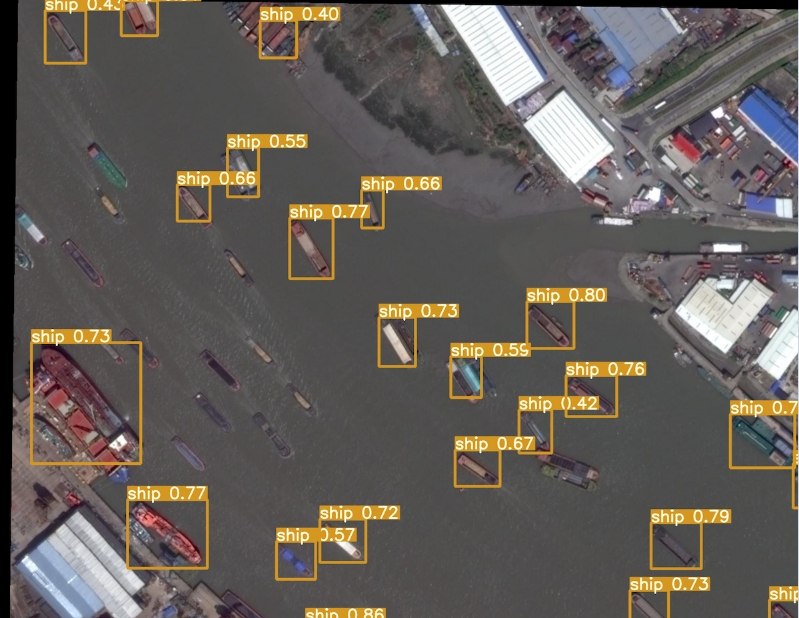
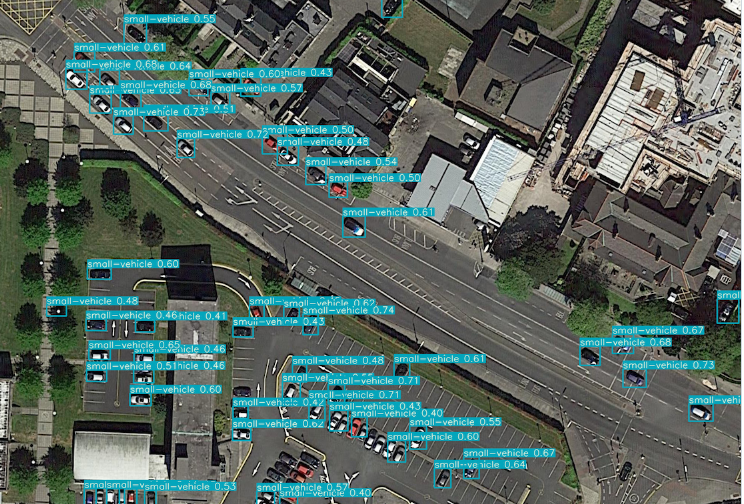
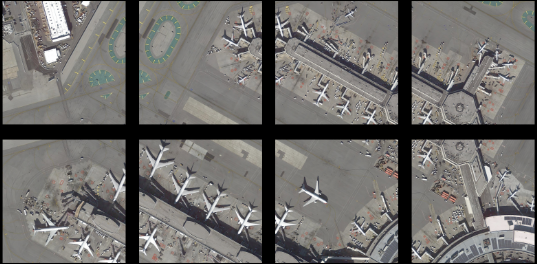
2 实现效果
实现效果如下:可以看出对船只、飞机等识别效果还是很好的。


3 Yolov5算法
简介
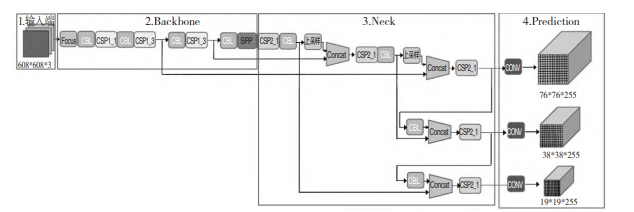
下图所示为 YOLOv5 的网络结构图,分为输入端,Backbone,Neck 和 Prediction 四个部分。其中,
输入端包括 Mosaic 数据增强、自适应图片缩放、自适应锚框计算,Backbone 包括 Focus 结构、CSP
结 构,Neck 包 括 FPN+PAN 结 构,Prediction 包 括GIOU_Loss 结构。
相关代码
class Yolo(object):def __init__(self, weights_file, verbose=True):self.verbose = verbose# detection paramsself.S = 7 # cell sizeself.B = 2 # boxes_per_cellself.classes = ["aeroplane", "bicycle", "bird", "boat", "bottle","bus", "car", "cat", "chair", "cow", "diningtable","dog", "horse", "motorbike", "person", "pottedplant","sheep", "sofa", "train","tvmonitor"]self.C = len(self.classes) # number of classes# offset for box center (top left point of each cell)self.x_offset = np.transpose(np.reshape(np.array([np.arange(self.S)]*self.S*self.B),[self.B, self.S, self.S]), [1, 2, 0])self.y_offset = np.transpose(self.x_offset, [1, 0, 2])self.threshold = 0.2 # confidence scores threholdself.iou_threshold = 0.4# the maximum number of boxes to be selected by non max suppressionself.max_output_size = 10self.sess = tf.Session()self._build_net()self._build_detector()self._load_weights(weights_file)
4 数据处理和训练
数据集
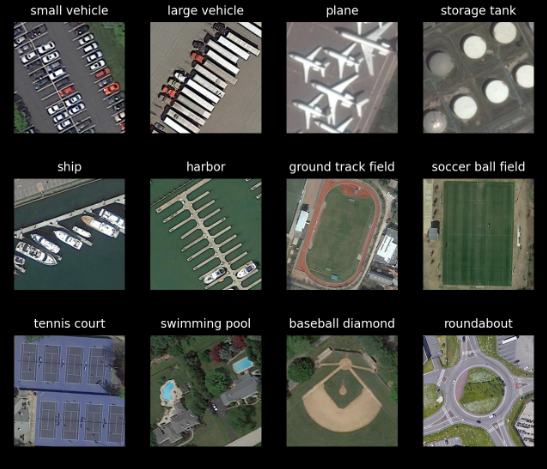
本项目使用 DOTA 数据集,原数据集中待检测的目标如下
原数据集中的标签如下

图像分割和尺寸调整
YOLO 模型的图像输入尺寸是固定的,由于原数据集中的图像尺寸不一,我们将原数据集中的图像按目标分布的位置分割成一个个包含目标的子图,并将每个子图尺寸调整为
1024×1024。分割前后的图像如所示。
分割前

分割后
模型训练
在 yolov5/ 目录,运行 train.py 文件开始训练:
python train.py --weight weights/yolov5s.pt --batch 16 --epochs 100 --cache
其中的参数说明:
- weight:使用的预训练权重,这里示范使用的是 yolov5s 模型的预训练权重
- batch:mini-batch 的大小,这里使用 16
- epochs:训练的迭代次数,这里我们训练 100 个 epoch
- cache:使用数据缓存,加速训练进程
相关代码
#部分代码
def train(hyp, opt, device, tb_writer=None):logger.info(f'Hyperparameters {hyp}')log_dir = Path(tb_writer.log_dir) if tb_writer else Path(opt.logdir) / 'evolve' # logging directorywdir = log_dir / 'weights' # weights directoryos.makedirs(wdir, exist_ok=True)last = wdir / 'last.pt'best = wdir / 'best.pt'results_file = str(log_dir / 'results.txt')epochs, batch_size, total_batch_size, weights, rank = \opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank# Save run settingswith open(log_dir / 'hyp.yaml', 'w') as f:yaml.dump(hyp, f, sort_keys=False)with open(log_dir / 'opt.yaml', 'w') as f:yaml.dump(vars(opt), f, sort_keys=False)# Configurecuda = device.type != 'cpu'init_seeds(2 + rank)with open(opt.data) as f:data_dict = yaml.load(f, Loader=yaml.FullLoader) # data dictwith torch_distributed_zero_first(rank):check_dataset(data_dict) # checktrain_path = data_dict['train']test_path = data_dict['val']nc, names = (1, ['item']) if opt.single_cls else (int(data_dict['nc']), data_dict['names']) # number classes, namesassert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check# Modelpretrained = weights.endswith('.pt')if pretrained:with torch_distributed_zero_first(rank):attempt_download(weights) # download if not found locallyckpt = torch.load(weights, map_location=device) # load checkpointif 'anchors' in hyp and hyp['anchors']:ckpt['model'].yaml['anchors'] = round(hyp['anchors']) # force autoanchormodel = Model(opt.cfg or ckpt['model'].yaml, ch=3, nc=nc).to(device) # createexclude = ['anchor'] if opt.cfg else [] # exclude keysstate_dict = ckpt['model'].float().state_dict() # to FP32state_dict = intersect_dicts(state_dict, model.state_dict(), exclude=exclude) # intersectmodel.load_state_dict(state_dict, strict=False) # loadlogger.info('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # reportelse:model = Model(opt.cfg, ch=3, nc=nc).to(device) # create# Freezefreeze = ['', ] # parameter names to freeze (full or partial)if any(freeze):for k, v in model.named_parameters():if any(x in k for x in freeze):print('freezing %s' % k)v.requires_grad = False# Optimizernbs = 64 # nominal batch sizeaccumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizinghyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decaypg0, pg1, pg2 = [], [], [] # optimizer parameter groupsfor k, v in model.named_parameters():v.requires_grad = Trueif '.bias' in k:pg2.append(v) # biaseselif '.weight' in k and '.bn' not in k:pg1.append(v) # apply weight decayelse:pg0.append(v) # all else
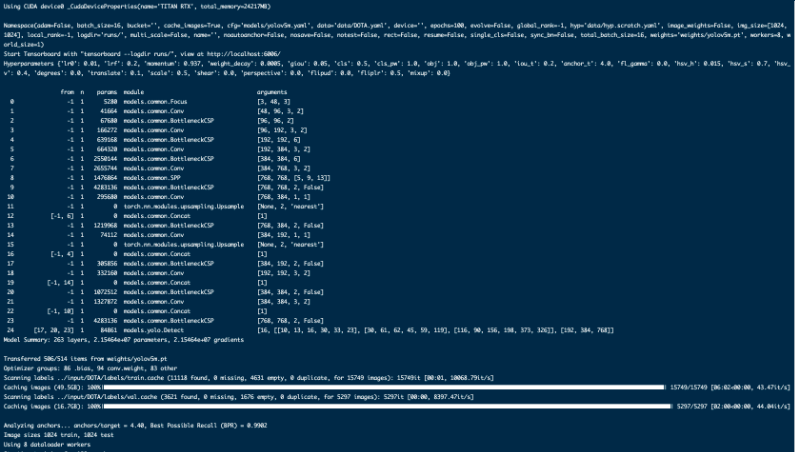
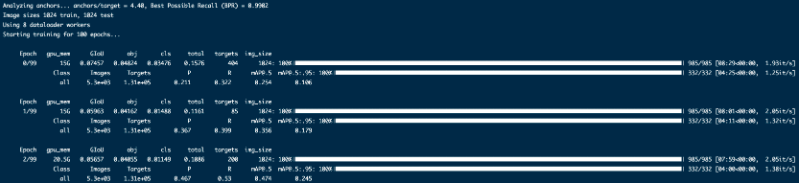
训练开始时的日志信息
5 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
大创项目推荐 深度学习卫星遥感图像检测与识别 -opencv python 目标检测
文章目录 0 前言1 课题背景2 实现效果3 Yolov5算法4 数据处理和训练5 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **深度学习卫星遥感图像检测与识别 ** 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐…...
pod的环节
pod 是k8s当中最小的资源管理组件 Pod也是最小化运行容器化的应用的资源管理对象 Pod是一个抽象化的概念,可以理解为一个或多个容器化的集合 在一个pod当中运行一个容器,是最常用的方式 在一个pod当中同时运行多个容器,在一个pod当中可以…...
Unity | Shader基础知识番外(向量数学知识速成)
目录 一、向量定义 二、计算向量 三、向量的加法(连续行走) 四、向量的长度 五、单位向量 六、向量的点积 1 计算 2 作用 七、向量的叉乘 1 承上启下 2 叉乘结论 3 叉乘的计算(这里看不懂就百度叉乘计算) 八、欢迎收…...

一个小白的微不足道的见解关于未来
随着科技的不断发展,IT行业日益壮大,运维工程师在其中扮演着至关重要的角色。他们负责维护和管理企业的技术基础设施,确保系统的正常运行。然而,随着技术的进步和行业的变化,运维工程师的未来将面临着一系列挑战和机遇…...
图的遍历(搜索)算法(深度优先算法DFS和广度优先算法BFS)
一、图的遍历的定义: 从图的某个顶点出发访问遍图中所有顶点,且每个顶点仅被访问一次。(连通图与非连通图) 二、深度优先遍历(DFS); 1、访问指定的起始顶点; 2、若当前访问的顶点…...

抖店做不起来?新手常见起店失败问题总结,看下你中了几条?
我是王路飞。 能看到这篇文章的,肯定是处境符合标题内容了。 抖店的门槛很低,运营思路其实也不算难,但就是很多新手做不起来。 这中间,可能跟平台、项目没什么关系,而是跟你自己有关系,走错了方向&#…...

【每日面试题】精选java面试题之redis
Redis是什么?为什么要使用Redis? Redis是一个开源的高性能键值对存储数据库。它提供了多种数据结构,包括字符串、列表、集合、有序集合、哈希表等。Redis具有快速、可扩展、持久化、支持多种数据结构等特点,适用于缓存、消息队列…...
OSCP 靶场 - Vault
端口扫描 nmap nmap -O 192.168.162.172 smb枚举 smbmap(kali自带) //枚举GUEST用户可以使用的目录 smbmap -u GUEST -H 192.168.162.172 NTLMrelay—smbrelay 1.制作钓鱼文件 使用GitHub - xct/hashgrab: generate payloads that force authentication against an attacker…...

uniapp子组件向父组件传值
目录 子组件向父组件传值子组件1子组件2 父组件最后 子组件向父组件传值 子组件1 <template><view class"content"><view v-for"(item,index) in list" :key"index">{{item}}</view></view> </template>&…...

过滤特殊 微信昵称
$nickName preg_replace(/[\xf0-\xf7].{3}/, , $userData[nickName]);...

LLM、AGI、多模态AI 篇一:开源大语言模型简记
文章目录 系列开源大模型LlamaChinese-LLaMA-AlpacaLlama2-ChineseLinlyYaYiChatGLMtransformersGPT-3(未完全开源)BERTT5QwenBELLEMossBaichuan...

微信小程序中获取用户当前位置的解决方案
微信小程序中获取用户当前位置的解决方案 1 概述 微信小程序有时需要获取用户当前位置,以便为用户提供基于位置信息的服务(附近美食、出行方案等)。 获取用户当前位置的前提是用户手机需要打开 GPS 定位开关;其次,微…...
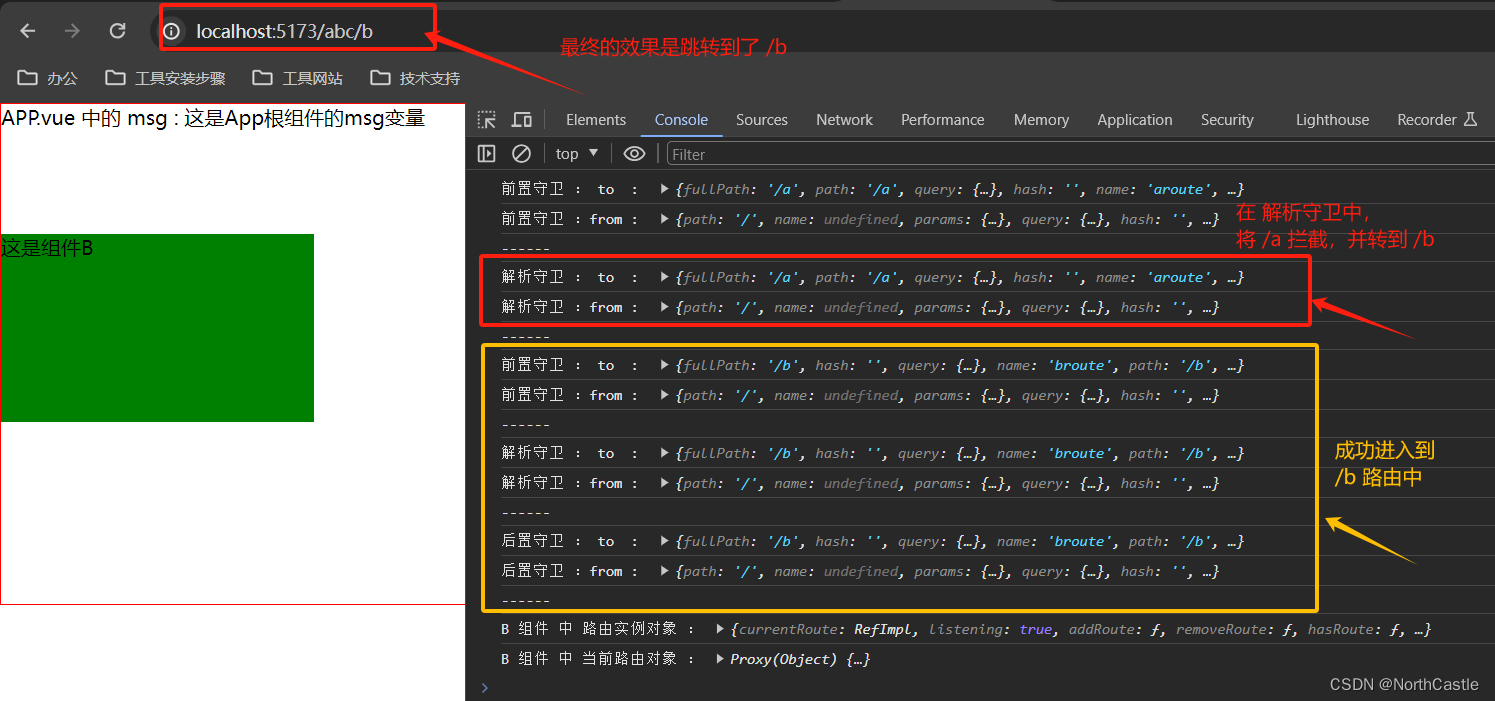
Vue3-35-路由-路由守卫的简单认识
什么是路由守卫 路由守卫,就是在 路由跳转 的过程中, 可以进行一些拦截,做一些逻辑判断, 控制该路由是否可以正常跳转的函数。常用的路由守卫有三个 : beforeEach() : 前置守卫,在路由 跳转前 就会被拦截&…...

制药企业符合CSV验证需要注意什么?
在制药行业中,计算机化系统验证(CSV)是确保生产过程的合规性和数据完整性的关键要素。通过CSV验证,制药企业可以保证其计算机化系统的可靠性和合规性,从而确保产品质量和患者安全。然而,符合CSV验证并不是一…...

再谈动态SQL
专栏精选 引入Mybatis Mybatis的快速入门 Mybatis的增删改查扩展功能说明 mapper映射的参数和结果 Mybatis复杂类型的结果映射 Mybatis基于注解的结果映射 Mybatis枚举类型处理和类型处理器 再谈动态SQL Mybatis配置入门 Mybatis行为配置之Ⅰ—缓存 Mybatis行为配置…...
【数据结构】树
一.二叉树的基本概念和性质: 1.二叉树的递归定义: 二叉树或为空树,或是由一个根结点加上两棵分别称为左子树和右子树的、互不相交的二叉树组成 2.二叉树的特点: (1)每个结点最多只有两棵子树࿰…...
【Midjourney】AI绘画新手教程(一)登录和创建服务器,生成第一幅画作
一、登录Discord 1、访问Discord官网 使用柯學尚网(亲测非必须,可加快响应速度)访问Discord官方网址:https://discord.com 选择“在您的浏览器中打开Discord” 然后,注册帐号、购买套餐等,在此不做缀述。…...

对比 PyTorch 和 TensorFlow:选择适合你的深度学习框架
目录 引言 深度学习在各行业中的应用 PyTorch 和 TensorFlow 简介 PyTorch:简介与设计理念 发展历史和背景 主要特点和设计理念 TensorFlow:简介与设计理念 发展历史和背景 主要特点和设计理念 PyTorch 和 TensorFlow 的重要性 Pytorch对比Te…...

Oracle笔记-查看表已使用空间最大空间
目前以Oracle18c为例,主要是查这个表USER_SEGMENTS。 在 Oracle 18c 数据库中,USER_SEGMENTS 是一个系统表,用于存储当前用户(当前会话)拥有的所有段的信息。段是 Oracle 中分配存储空间的逻辑单位,用于存…...

大数据HCIE成神之路之特征工程——特征选择
特征选择 1.1 特征选择 - Filter方法1.1.1 实验任务1.1.1.1 实验背景1.1.1.2 实验目标1.1.1.3 实验数据解析1.1.1.4 实验思路 1.1.2 实验操作步骤 1.2 特征选择 - Wrapper方法1.2.1 实验任务1.2.1.1 实验背景1.2.1.2 实验目标1.2.1.3 实验数据解析1.2.1.4 实验思路 1.2.2 实验操…...

从安全卫士到AI指挥官:周鸿祎的“AI突围”实录!
2026年3月27日,北京——在360总部楼下,一张临时搭建的长桌上,周鸿祎身穿印有“AI世界”的黑色工装马甲,手握键盘,亲自为现场观众“装龙虾”。这幅画面不仅让人恍惚回到十几年前的中关村,也标志着一场关于AI…...
)
STM32F103C8T6接KY-9250陀螺仪,串口数据解析与姿态角计算全流程(附避坑点)
STM32F103C8T6与KY-9250陀螺仪实战:从硬件对接到姿态解算的完整指南 第一次拿到STM32开发板和KY-9250模块时,那种既兴奋又忐忑的心情记忆犹新——兴奋于即将实现酷炫的姿态检测功能,忐忑于不知从何下手的迷茫。本文将以手把手的方式ÿ…...

OpenClaw性能测试:Qwen3.5-4B-Claude处理百页文档实测
OpenClaw性能测试:Qwen3.5-4B-Claude处理百页文档实测 1. 测试背景与目标 上周我在整理一个开源项目的技术文档时,遇到了一个头疼的问题——这份文档长达137页,包含了代码示例、架构图和版本变更说明。手动梳理关键信息耗费了我整整两天时间…...

Ryujinx零门槛全攻略:开源Switch模拟器从入门到精通
Ryujinx零门槛全攻略:开源Switch模拟器从入门到精通 【免费下载链接】Ryujinx 用 C# 编写的实验性 Nintendo Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/ry/Ryujinx 价值定位:为什么Ryujinx能重新定义Switch游戏体验ÿ…...

Vulkan与OpenGL深度解析——现代图形渲染的技术演进
1. 从OpenGL到Vulkan:图形渲染的进化之路 还记得我第一次接触图形编程时,OpenGL就像一位和蔼的老教授,把复杂的GPU操作封装成简单的API调用。但随着项目复杂度提升,我逐渐发现这位"老教授"的教学方式有些过时——它隐藏…...

USB2.0供电那些事儿:为什么你的外设总是供电不足?
USB2.0供电困境解析:从原理到实践的全面解决方案 当你的移动硬盘突然断开连接,或者外接键盘间歇性失灵时,很可能正遭遇USB2.0供电不足的经典难题。这种看似简单的接口背后,隐藏着复杂的电力分配机制与设备兼容性博弈。本文将带你穿…...

Blaze表达式优化完全手册:提升计算性能的7个核心策略
Blaze表达式优化完全手册:提升计算性能的7个核心策略 【免费下载链接】blaze NumPy and Pandas interface to Big Data 项目地址: https://gitcode.com/gh_mirrors/bl/blaze Blaze作为NumPy和Pandas风格的大数据接口工具,能够帮助用户轻松处理各类…...

Unity WebGL输入优化:跨平台文本输入解决方案的技术突破
Unity WebGL输入优化:跨平台文本输入解决方案的技术突破 【免费下载链接】WebGLInput IME for Unity WebGL 项目地址: https://gitcode.com/gh_mirrors/we/WebGLInput 在Unity WebGL应用的开发过程中,文本输入功能一直是开发者面临的核心挑战。传…...

用Rust还是JavaScript?Tauri 2.0系统托盘开发的两种姿势与选型建议
Tauri 2.0系统托盘开发:Rust与JavaScript的技术选型深度解析 当桌面应用需要常驻后台运行时,系统托盘功能便成为用户体验的关键组件。Tauri 2.0作为新一代跨平台桌面框架,允许开发者在前端JavaScript与后端Rust两种技术栈中实现这一功能。本文…...

三三复制系统模式介绍
三三复制系统模式介绍:从底层逻辑到合规落地在社交电商与团队裂变领域,三三复制系统凭借其低门槛、高稳定性的特点,成为企业实现用户快速增长与业绩倍增的重要工具。不同于传统多级分销的复杂层级,三三复制系统以“三”为核心基数…...