[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(2) 质量刚体的在坐标系下运动
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。
2024年底本人学位论文发表后方可摘抄
若有帮助请引用
本文参考:
黎 旭,陈 强 洪,甄 文 强 等.惯 性 张 量 平 移 和 旋 转 复 合 变 换 的 一 般 形 式 及 其 应 用[J].工 程 数 学 学 报,2022,39(06):1005-1011.
食用方法
质量点的动量与角动量
刚体的动量与角动量——力与力矩的关系
惯性矩阵的表达与推导——在刚体运动过程中的作用
惯性矩阵在不同坐标系下的表达
务必自己推导全部公式,并理解每个符号的含义
机构运动学与动力学分析与建模 Ch00-2质量刚体的在坐标系下运动Part2
- 2.2.3 欧拉方程 Euler equation
2.2.3 欧拉方程 Euler equation
对式 H ⃗ Σ M / O F \vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F} HΣM/OF进一步分析,有:
H ⃗ Σ M / O F = ∫ R ⃗ O P i F × ( d m i ⋅ d R ⃗ P i F d t ) = ∫ ( ( R ⃗ P i F − R ⃗ O F ) × V ⃗ P i F ) d m i = ∫ ( R ⃗ P i F × V ⃗ P i F ) d m i − ∫ ( R ⃗ O F × V ⃗ P i F ) d m i = H ⃗ Σ M F − R ⃗ O F × P ⃗ G F \begin{split} \vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}&=\int{\vec{R}_{\mathrm{OP}_{\mathrm{i}}}^{F}\times \left( \mathrm{d}m_i\cdot \frac{\mathrm{d}\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}}{\mathrm{d}t} \right)}=\int{\left( \left( \vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}-\vec{R}_{\mathrm{O}}^{F} \right) \times \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_i} \\ &=\int{\left( \vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}\times \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_i}-\int{\left( \vec{R}_{\mathrm{O}}^{F}\times \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_i} \\ &=\vec{H}_{\Sigma _{\mathrm{M}}}^{F}-\vec{R}_{\mathrm{O}}^{F}\times \vec{P}_{\mathrm{G}}^{F} \end{split} HΣM/OF=∫ROPiF×(dmi⋅dtdRPiF)=∫((RPiF−ROF)×VPiF)dmi=∫(RPiF×VPiF)dmi−∫(ROF×VPiF)dmi=HΣMF−ROF×PGF
对上式进一步求导,则有:
d H ⃗ Σ M / O F d t = d H ⃗ Σ M F d t − d ( R ⃗ O F × P ⃗ G F ) d t = d H ⃗ Σ M F d t − V ⃗ O F × P ⃗ G F − m t o t a l ⋅ R ⃗ O F × a ⃗ G F \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}/\mathrm{O}}^{F}}{\mathrm{d}t}=\frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}-\frac{\mathrm{d}\left( \vec{R}_{\mathrm{O}}^{F}\times \vec{P}_{\mathrm{G}}^{F} \right)}{\mathrm{d}t}=\frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}-\vec{V}_{\mathrm{O}}^{F}\times \vec{P}_{\mathrm{G}}^{F}-m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{O}}^{F}\times \vec{a}_{\mathrm{G}}^{F} dtdHΣM/OF=dtdHΣMF−dtd(ROF×PGF)=dtdHΣMF−VOF×PGF−mtotal⋅ROF×aGF
其中:
H ⃗ Σ M F = ∫ R ⃗ P i F × p ⃗ P i F = ∫ ( R ⃗ G F + R ⃗ G P i F ) × ( d m i ⋅ ( V ⃗ G F + V ⃗ G P i F ) ) = ∫ R ⃗ G F × V ⃗ G F d m i ⏟ m t o t a l ⋅ R ⃗ G F × V ⃗ G F + ∫ R ⃗ G F × V ⃗ G P i F d m i ⏟ 0 + ∫ R ⃗ G P i F × V ⃗ G F d m i ⏟ 0 + ∫ R ⃗ G P i F × V ⃗ G P i F d m i ⏟ ∫ R ⃗ G P i F × ( ω ⃗ M F × R ⃗ G P i F ) d m i = m t o t a l ⋅ R ⃗ G F × V ⃗ G F + ∫ R ⃗ G P i F × ( ω ⃗ M F × R ⃗ G P i F ) d m i = m t o t a l ⋅ R ⃗ G F × V ⃗ G F + ∫ ( R ⃗ G P i F ⋅ R ⃗ G P i F ) ω ⃗ M F d m i − ∫ ( R ⃗ G P i F ⋅ ω ⃗ M F ) R ⃗ G P i F d m i \begin{split} \vec{H}_{\Sigma _{\mathrm{M}}}^{F}&=\int{\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}\times \vec{p}_{\mathrm{P}_{\mathrm{i}}}^{F}}=\int{\left( \vec{R}_{\mathrm{G}}^{F}+\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \times \left( \mathrm{d}m_i\cdot \left( \vec{V}_{\mathrm{G}}^{F}+\vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \right)} \\ &=\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}}\mathrm{d}m_i}\\ m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}\\ \end{array}+\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_i}\\ 0\\ \end{array}+\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \vec{V}_{\mathrm{G}}^{F}}\mathrm{d}m_i}\\ 0\\ \end{array}+\begin{array}{c} \underbrace{\int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_i}\\ \int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right)}\mathrm{d}m_i\\ \end{array} \\ &=m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}+\int{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\times \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right)}\mathrm{d}m_i \\ &=m_{\mathrm{total}}\cdot \vec{R}_{\mathrm{G}}^{F}\times \vec{V}_{\mathrm{G}}^{F}+\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\omega}_{\mathrm{M}}^{F}}\mathrm{d}m_i-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_i \end{split} HΣMF=∫RPiF×pPiF=∫(RGF+RGPiF)×(dmi⋅(VGF+VGPiF))= ∫RGF×VGFdmimtotal⋅RGF×VGF+ ∫RGF×VGPiFdmi0+ ∫RGPiF×VGFdmi0+ ∫RGPiF×VGPiFdmi∫RGPiF×(ωMF×RGPiF)dmi=mtotal⋅RGF×VGF+∫RGPiF×(ωMF×RGPiF)dmi=mtotal⋅RGF×VGF+∫(RGPiF⋅RGPiF)ωMFdmi−∫(RGPiF⋅ωMF)RGPiFdmi
将 H ⃗ Σ M F \vec{H}_{\Sigma _{\mathrm{M}}}^{F} HΣMF进一步求导,则有:
d H ⃗ Σ M F d t = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + 2 ∫ ( V ⃗ P i F ⋅ R ⃗ G P i F ) ω ⃗ M F d m i + ∫ ( R ⃗ G P i F ⋅ R ⃗ G P i F ) α ⃗ M F d m i − ∫ ( V ⃗ G P i F ⋅ ω ⃗ M F ) R ⃗ G P i F d m i − ∫ ( R ⃗ G P i F ⋅ α ⃗ M F ) R ⃗ G P i F d m i − ∫ ( R ⃗ G P i F ⋅ ω ⃗ M F ) V ⃗ G P i F d m i = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + ( ∫ ( R ⃗ G P i F ⋅ R ⃗ G P i F ) α ⃗ M F d m i − ∫ ( R ⃗ G P i F ⋅ α ⃗ M F ) R ⃗ G P i F d m i ) − ∫ ( R ⃗ G P i F ⋅ ω ⃗ M F ) ( ω ⃗ M F × R ⃗ G P i F ) d m i = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ) ⋅ E 3 × 3 α ⃗ M F d m i − ∫ ( R ⃗ G P i F T α ⃗ M F ) R ⃗ G P i F d m i ) − ∫ ( R ⃗ G P i F T ω ⃗ M F ) ( ω ⃗ M F × R ⃗ G P i F ) d m i = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + α ⃗ M F ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i − ω ⃗ M F × ( ∫ ( R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F ) \begin{split} \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}&=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+2\int{\left( \vec{V}_{\mathrm{P}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\omega}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}+\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\alpha}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}\\ -\int{\left( \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\alpha}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \vec{V}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}}\\ \end{cases} \\ &=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left( \int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \vec{\alpha}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\alpha}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}} \right)\\ -\int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_{\mathrm{i}}}\\ \end{cases} \\ &=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \cdot E^{3\times 3}\vec{\alpha}_{\mathrm{M}}^{F}}\mathrm{d}m_{\mathrm{i}}-\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{\alpha}_{\mathrm{M}}^{F} \right) \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}\mathrm{d}m_{\mathrm{i}} \right)\\ -\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{\omega}_{\mathrm{M}}^{F} \right) \left( \vec{\omega}_{\mathrm{M}}^{F}\times \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F} \right) \mathrm{d}m_{\mathrm{i}}}\\ \end{cases} \\ &=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\vec{\alpha}_{\mathrm{M}}^{F}\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\\ -\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right)\\ \end{cases} \end{split} dtdHΣMF=⎩ ⎨ ⎧RGF×mtotal⋅aGF+2∫(VPiF⋅RGPiF)ωMFdmi+∫(RGPiF⋅RGPiF)αMFdmi−∫(VGPiF⋅ωMF)RGPiFdmi−∫(RGPiF⋅αMF)RGPiFdmi−∫(RGPiF⋅ωMF)VGPiFdmi=⎩ ⎨ ⎧RGF×mtotal⋅aGF+(∫(RGPiF⋅RGPiF)αMFdmi−∫(RGPiF⋅αMF)RGPiFdmi)−∫(RGPiF⋅ωMF)(ωMF×RGPiF)dmi=⎩ ⎨ ⎧RGF×mtotal⋅aGF+(∫(RGPiFTRGPiF)⋅E3×3αMFdmi−∫(RGPiFTαMF)RGPiFdmi)−∫(RGPiFTωMF)(ωMF×RGPiF)dmi=⎩ ⎨ ⎧RGF×mtotal⋅aGF+αMF∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi−ωMF×(∫(RGPiFRGPiFT)dmi⋅ωMF)
其中:
⇒ − ω ⃗ M F × ∫ ( R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F = ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T − R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 ) d m i ⋅ ω ⃗ M F ) = ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F ) − ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 ) d m i ⋅ ω ⃗ M F ) ⏟ 0 \begin{split} \Rightarrow &-\vec{\omega}_{\mathrm{M}}^{F}\times \int{\left( \vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \\ &=\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}-{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \\ &=\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) -\begin{array}{c} \underbrace{\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) }\\ 0\\ \end{array} \end{split} ⇒−ωMF×∫(RGPiFRGPiFT)dmi⋅ωMF=ωMF×(∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT−RGPiFTRGPiF⋅E3×3)dmi⋅ωMF)=ωMF×(∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi⋅ωMF)− ωMF×(∫(RGPiFTRGPiF⋅E3×3)dmi⋅ωMF)0
将上两式进行汇总,可得:
⇒ d H ⃗ Σ M F d t = { R ⃗ G F × m t o t a l ⋅ a ⃗ G F + ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i α ⃗ M F + ω ⃗ M F × ( ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i ⋅ ω ⃗ M F ) = R ⃗ G F × m t o t a l ⋅ a ⃗ G F + [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) \begin{split} \Rightarrow \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}&=\begin{cases} \vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\vec{\alpha}_{\mathrm{M}}^{F}\\ +\vec{\omega}_{\mathrm{M}}^{F}\times \left( \int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_{\mathrm{i}}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right)\\ \end{cases} \\ &=\vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \end{split} ⇒dtdHΣMF=⎩ ⎨ ⎧RGF×mtotal⋅aGF+∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmiαMF+ωMF×(∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi⋅ωMF)=RGF×mtotal⋅aGF+[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)
其中:
[ I ] Σ M / G F = ∫ ( R ⃗ G P i F T R ⃗ G P i F ⋅ E 3 × 3 − R ⃗ G P i F R ⃗ G P i F T ) d m i \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}=\int{\left( {\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}}\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}\cdot E^{3\times 3}-\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}{\vec{R}_{\mathrm{GP}_{\mathrm{i}}}^{F}}^{\mathrm{T}} \right)}\mathrm{d}m_i [I]ΣM/GF=∫(RGPiFTRGPiF⋅E3×3−RGPiFRGPiFT)dmi
[ I ] Σ M / G F \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F} [I]ΣM/GF被称为惯性矩阵inertia matrix(或称为惯量矩阵),为该物体在固定坐标系下相对于质心点 G G G的惯性张量。
进而可知:
d H ⃗ Σ M F d t = M ⃗ Σ M F = ∫ R ⃗ P i F × d F ⃗ P i F = R ⃗ G F × m t o t a l ⋅ a ⃗ G F + [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) \frac{\mathrm{d}\vec{H}_{\Sigma _{\mathrm{M}}}^{F}}{\mathrm{d}t}=\vec{M}_{\Sigma _{\mathrm{M}}}^{F}=\int{\vec{R}_{\mathrm{P}_{\mathrm{i}}}^{F}\times \mathrm{d}\vec{F}_{\mathrm{P}_{\mathrm{i}}}^{F}}=\vec{R}_{\mathrm{G}}^{F}\times m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F}+\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) dtdHΣMF=MΣMF=∫RPiF×dFPiF=RGF×mtotal⋅aGF+[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)
上式被称为:欧拉方程在惯性坐标系下相对固定点的表达式;当固定点与质心点重合时(此时G点为固定点),则有:
M ⃗ Σ M / G F = M ⃗ Σ M F − R ⃗ G F × ( m t o t a l ⋅ a ⃗ G F ) = R ⃗ G F × ( m t o t a l ⋅ a ⃗ G F ) + [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) − R ⃗ G F × ( m t o t a l ⋅ a ⃗ G F ) = [ I ] Σ M / G F α ⃗ M F + ω ⃗ M F × ( [ I ] Σ M / G F ⋅ ω ⃗ M F ) \begin{split} \vec{M}_{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}&=\vec{M}_{\Sigma _{\mathrm{M}}}^{F}-\vec{R}_{\mathrm{G}}^{F}\times \left( m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F} \right) \\ &=\vec{R}_{\mathrm{G}}^{F}\times \left( m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F} \right) +\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) -\vec{R}_{\mathrm{G}}^{F}\times \left( m_{\mathrm{total}}\cdot \vec{a}_{\mathrm{G}}^{F} \right) \\ &=\left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\vec{\alpha}_{\mathrm{M}}^{F}+\vec{\omega}_{\mathrm{M}}^{F}\times \left( \left[ I \right] _{\Sigma _{\mathrm{M}}/\mathrm{G}}^{F}\cdot \vec{\omega}_{\mathrm{M}}^{F} \right) \end{split} MΣM/GF=MΣMF−RGF×(mtotal⋅aGF)=RGF×(mtotal⋅aGF)+[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)−RGF×(mtotal⋅aGF)=[I]ΣM/GFαMF+ωMF×([I]ΣM/GF⋅ωMF)
此时为固定坐标系下相对固定点质心 G G G求解的欧拉方程。
相关文章:
 质量刚体的在坐标系下运动)
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-2(2) 质量刚体的在坐标系下运动
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有…...
【亚马逊云科技】自家的AI助手 - Amazon Q
写在前面:博主是一只经过实战开发历练后投身培训事业的“小山猪”,昵称取自动画片《狮子王》中的“彭彭”,总是以乐观、积极的心态对待周边的事物。本人的技术路线从Java全栈工程师一路奔向大数据开发、数据挖掘领域,如今终有小成…...
网络安全—SSL安全访问应用
文章目录 网络拓扑部署CA服务器颁发证书开启Web服务安装IIS服务修改Web默认网页 申请Web证书前提准备申请文件生成申请web证书开始安装web证书 客户机访问web默认网站使用HTTP使用HTTPS 为客户机安装浏览器证书 环境:Windows Server 2003 网络拓扑 这里使用NAT还是…...

Qt5.14.2实现将html文件转换为pdf文件
文章目录 简介源码widget.cppwidget.uihtml文件演示效果简介 QPdfWriter是Qt框架中用于创建和写入PDF文件的类。它允许您在您的Qt应用程序中动态生成并输出PDF文档,以便进行打印、保存或导出。 QPdfWriter类提供了以下一些常用的函数和方法,可以让您创建和定制PDF文件: 构…...
Minecraft教程:使用MCSM面板搭建我的世界私服并实现远程联机
文章目录 前言1. 安装JAVA2. MCSManager安装3.局域网访问MCSM4.创建我的世界服务器5.局域网联机测试6.安装cpolar内网穿透7. 配置公网访问地址8.远程联机测试9. 配置固定远程联机端口地址9.1 保留一个固定tcp地址9.2 配置固定公网TCP地址9.3 使用固定公网地址远程联机 前言 Li…...
springboot学生成绩管理系统源码和论文
随着信息技术和网络技术的飞速发展,人类已进入全新信息化时代,传统管理技术已无法高效,便捷地管理信息。为了迎合时代需求,优化管理效率,各种各样的管理系统应运而生,各行各业相继进入信息管理时代…...

w20webshell之文件上传
1.什么是文件上传? 将本地文件传输到指定位置。2.什么是webshell 给恶意脚本提供运行环境3.文件上传所需要的条件 a.文件成功上传,未被删除 b.知道文件路径 c.文件所在系统支持脚本运行4.文件上传流程 支持任意文件上传的文件上传 a.恶意文件上传成功 b.…...

【Redis】非关系型数据库之Redis的主从复制、哨兵和集群高可用
目录 一、主从复制、哨兵、集群的区别 二、主从复制 2.1主从复制的作用 2.2主从复制的原理 2.3主从复制的实操 步骤一:环境准备 步骤二:安装Redis以及配置文件修改 Redis的主从配置文件都一样 步骤四:验证主从复制 三、哨兵 3.1哨兵…...
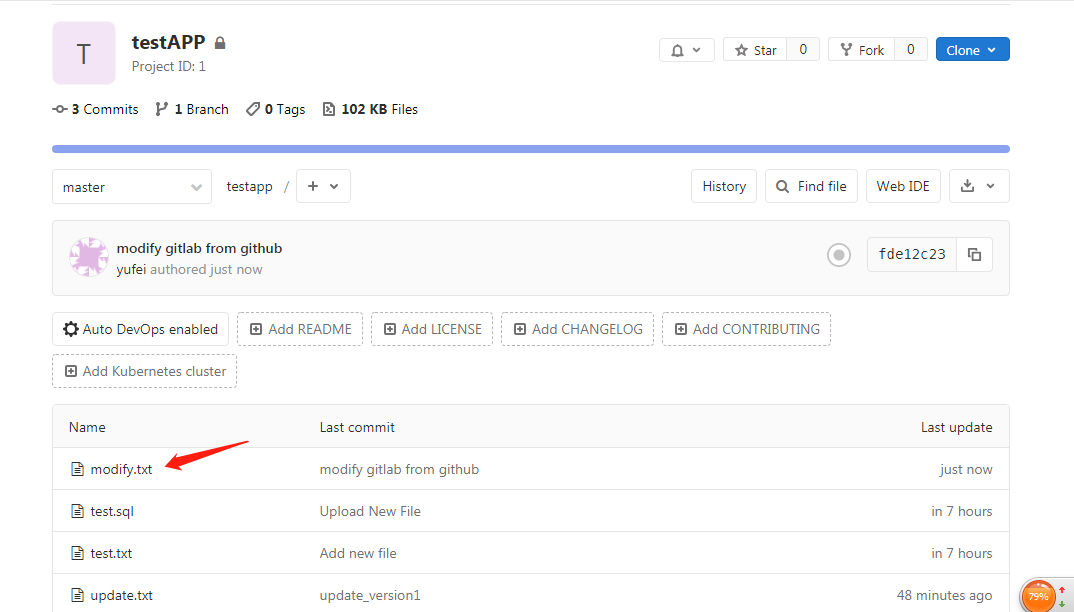
从私有Git仓库的搭建到命令的使用及部署再到分支管理
一、版本控制系统/版本控制器 1. 版本控制系统: git 分布式 —没有中心代码库,所有机器之间的地位同等(每台机器上都有相同的代码) svn 集中管理的 —有中心代码库,其他都是客户端 2.git与svn介绍 1.git属于分布…...
mysql基础-常用函数汇总
目录 1. 查询技巧 2. 时间函数 2.1 now() 2.2 current_date() 2.3 时间差timestampdiff()与datediff() 2.4 其他时间函数 3. 字符函数 3.1 截取函数 3.2 分割函数 3.3 left与right函数 3.4 其他函数 4. 数字函数 5. …...

COCO数据格式的json文件内容
COCO(Common Objects in Context)数据集现在有3种标注类型:object instances(目标实例), object keypoints(目标上的关键点), 和image captions(看图说话),使用JSON文件存储,包含了对图像中目标的边界框、类别标签、分割掩码等信息。 COCO标注文件是一个包含多个字…...
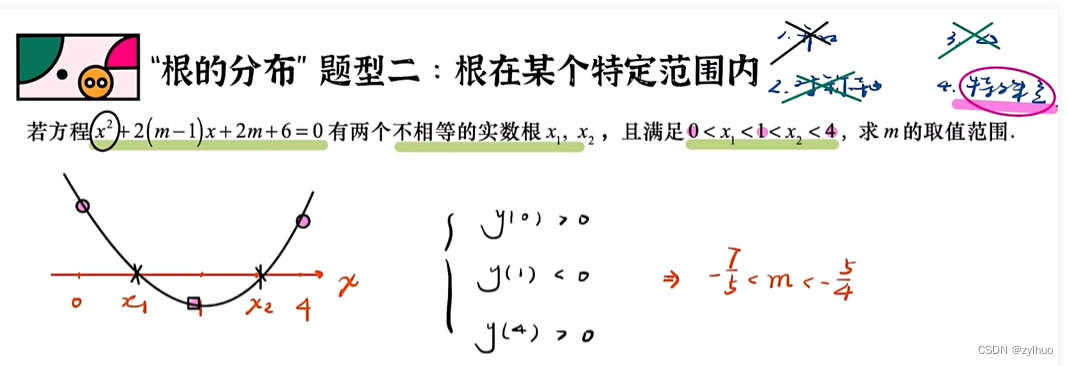
AI-数学-高中-3.二次函数的根的分布问题的解题方法
原作者学习视频:二次】3二次函数根分布问题(中档)_哔哩哔哩_bilibili 一、伟达定理(根与0比较的二次函数) 示例: 二、画图法: 1.开口方向的确定,有的示例可能存在向上、下两种情况…...

golang中gorm使用
前言 记录下go语言操作mysql数据库,选用gorm,gorm是一个流行的对象关系映射(ORM)库,用于简化与数据库的交互。 接入步骤 安装gorm:首先,你需要使用Go模块来安装gorm。在终端中运行以下命令&…...

centoss7安装mysql详细教程
【MySQL系列】在Centos7环境安装MySQL_centos7安装mysql-CSDN博客 【MySQL系列】在Centos7环境安装MySQL_centos7安装mysql-CSDN博客 【MySQL系列】在Centos7环境安装MySQL_centos7安装mysql-CSDN博客...

SpringBoot-拓展
邮件 依赖 <groupId>org.springframework.boot</groupId> <artifactId>spring-boot-starter-mail</artifactId>配置 spring.mail.username邮箱 spring.mail.password授权码 spring.mail.hostsmtp.qq.com # 开启加密验证 spring.mail.properties.mai…...
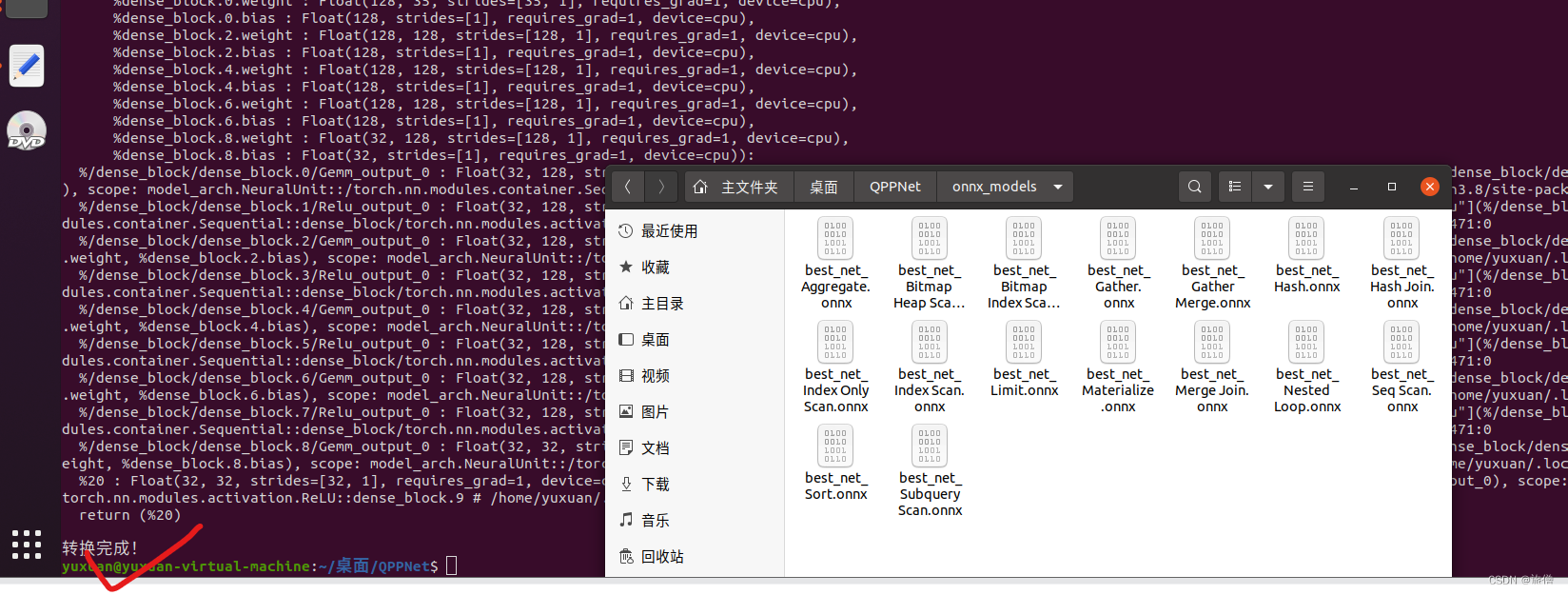
用于查询性能预测的计划结构深度神经网络模型--大数据计算基础大作业
用于查询性能预测的计划结构深度神经网络模型 论文阅读和复现 24.【X1.1】 在关系数据库查询优化领域,对查询时间的估计准确性直接决定了查询优化结果,进而影响到数据库整体的查询效率。但由于数据库自身的复杂性,查询时间受到数据分布、数据…...

MySQL5.7用于控制副本服务器的 SQL 语句
官网地址:MySQL :: MySQL 5.7 Reference Manual :: 13.4.2 SQL Statements for Controlling Replica Servers 欢迎关注留言,我是收集整理小能手,工具翻译,仅供参考,笔芯笔芯. MySQL 5.7 参考手册 / ... / CHANGE M…...

stable diffusion 人物高级提示词(四)朝向、画面范围、远近、焦距、机位、拍摄角度
一、朝向 英文中文front view正面Profile view / from side侧面half-front view半正面Back view背面(quarter front view:1.5)四分之一正面 prompt/英文中文翻译looking at the camera看向镜头facing the camera面对镜头turned towards the camera转向镜头looking away from …...
C#.Net学习笔记——设计模式六大原则
***************基础介绍*************** 1、单一职责原则 2、里氏替换原则 3、依赖倒置原则 4、接口隔离原则 5、迪米特法原则 6、开闭原则 一、单一职责原则 举例:类T负责两个不同的职责:职责P1,职责P2。当由于职责P1需求发生改变而需要修…...

go 修改postgresql的配置参数
postgresql.conf与postgresql.auto.conf的区别 postgresql.auto.conf的优先级高于postgresql.conf,如果一个参数同时存在postgresql.auto.conf和postgresql.conf里面,系统会先读postgresql.auto.conf的参数配置。 使用alter system set修改的是postgres…...

解锁端侧智能:基于BigDL-LLM与Qwen-1.8B-Chat的CPU高效推理实践
1. 为什么要在CPU上部署大模型? 最近两年大模型技术发展迅猛,但大多数应用都依赖昂贵的GPU服务器。我在实际项目中发现,很多中小企业和个人开发者其实更需要能在普通电脑上运行的轻量化方案。这就是为什么基于CPU的大模型部署方案变得越来越…...
)
告别内置ADC的烦恼:用ADS1119搞定STM32/DSP的高精度电压采样(附完整代码)
告别内置ADC的烦恼:用ADS1119搞定STM32/DSP的高精度电压采样(附完整代码) 在嵌入式系统开发中,电压采样是基础却至关重要的环节。许多工程师在使用STM32或DSP内置ADC时,常会遇到精度不足、抗干扰能力差、无法测量差分信…...
安装与中文环境配置实战)
Halcon深度学习工具(DLT)安装与中文环境配置实战
1. Halcon DLT安装前的准备工作 第一次接触Halcon深度学习工具(DLT)时,我完全被各种专业术语搞晕了。后来才发现,只要做好前期准备,安装过程其实比想象中简单得多。首先需要确认的是你的Windows系统版本,DLT目前支持Windows 10和1…...

高效跨平台游戏模组下载:WorkshopDL完全指南
高效跨平台游戏模组下载:WorkshopDL完全指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你是否在Epic Games Store、GOG或其他非Steam平台购买了游戏࿰…...

3分钟掌握Seraphine:英雄联盟智能助手完全指南
3分钟掌握Seraphine:英雄联盟智能助手完全指南 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine Seraphine是一款基于英雄联盟官方LCU API开发的智能游戏助手,通过自动BP系统和实时战绩查…...

Arm CoreLink PCK-600电源管理架构与寄存器编程详解
1. Arm CoreLink PCK-600电源控制架构解析在嵌入式系统设计中,电源管理单元(PMU)是实现高效能耗控制的核心组件。Arm CoreLink PCK-600作为业界领先的电源控制解决方案,其架构设计体现了现代SoC电源管理的先进理念。PCK-600系列采…...

Seraphine终极指南:英雄联盟智能助手如何提升您的游戏胜率
Seraphine终极指南:英雄联盟智能助手如何提升您的游戏胜率 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 在英雄联盟的激烈对局中,错过对局接受、BP阶段犹豫不决、缺乏队友对手信息&a…...

Midjourney像素艺术提示词工程:98%新手忽略的4个隐藏权重指令,实测提升风格还原度320%
更多请点击: https://intelliparadigm.com 第一章:Midjourney像素艺术提示词工程的底层逻辑重构 像素艺术在 Midjourney 中并非天然适配的生成模态,其高精度、低分辨率、强风格约束的特性与扩散模型默认的连续性渲染范式存在根本张力。要实现…...

Navis:开源项目标准化开发环境与工具链配置框架实践
1. 项目概述:一个为开发者打造的“导航星图”如果你和我一样,常年混迹在开源项目的海洋里,那么你一定对这种感觉不陌生:面对一个全新的、功能强大的开源工具,兴奋地克隆了仓库,然后……就卡在了第一步。REA…...

面向开发者的轻量级计划管理工具:配置驱动与命令行优先
1. 项目概述:一个为开发者而生的计划管理工具在软件开发的世界里,我们每天都在与各种“计划”打交道:版本迭代计划、个人学习计划、项目里程碑、甚至是每日的待办清单。然而,一个尴尬的现实是,市面上大多数项目管理工具…...