Unity中URP下实现深度贴花
文章目录
- 前言
- 一、场景设置
- 二、实现思路
- 1、通过深度图求出像素所在视图空间的Z值
- 2、通过模型面片的求出像素在观察空间下的坐标值
- 3、结合两者求出 深度图中像素的 XYZ值
- 4、再将此坐标转换到模型的本地空间,把XY作为UV来进行纹理采样
- 三、URP下实现
- 1、通过深度图求出像素所在视图空间的Z值
- 2、通过模型面片的求出像素在观察空间下的坐标值
- 3、结合两者求出 深度图中像素的 XYZ值
- 4、再将此坐标转换到模型的本地空间,把XY作为UV来进行纹理采样
- 四、最终效果
前言
在游戏中,有很多用到贴画的地方。比如:地面污渍、地面喷漆、地面血迹、魔法阵、地裂等效果。
我们在这篇文章中,来用深度图实现一下贴画的效果。
一、场景设置
- 使用之前的棋盘格设置一个场景,且在场景中,增加一些物体,来给贴花吸附。
- 然后,我们创建一个面片用于承载贴花Shader
- 我们要实现的贴花效果是会吸附在物体上的。
- 但是,我们目前的面片没有这个功能,我们接下来就需要来实现贴花的吸附功能。

二、实现思路
1、通过深度图求出像素所在视图空间的Z值
2、通过模型面片的求出像素在观察空间下的坐标值
3、结合两者求出 深度图中像素的 XYZ值
4、再将此坐标转换到模型的本地空间,把XY作为UV来进行纹理采样
三、URP下实现
1、通过深度图求出像素所在视图空间的Z值
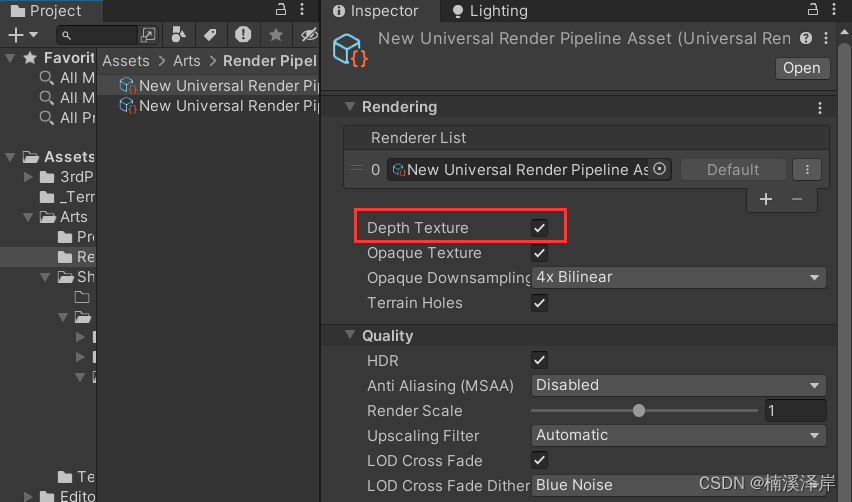
- 在URP设置中,开启深度图
- 申明 纹理 和 采样器
TEXTURE2D(_CameraDepthTexture);SAMPLER(sampler_CameraDepthTexture);
- 在片元着色器,得到观察空间下的深度图Z值
float4 depthVS = 1;
float2 screenUV = i.positionCS.xy / _ScreenParams.xy;
half depthTex = SAMPLE_TEXTURE2D(_CameraDepthTexture,sampler_CameraDepthTexture,screenUV);
half depthZ = LinearEyeDepth(depthTex,_ZBufferParams);
depthVS.z = depthZ;
2、通过模型面片的求出像素在观察空间下的坐标值
- 这步需要在 顶点着色器中完成
- 在 片元着色器输入结构体 中,增加一条用于存储 模型观察空间坐标值
float3 positionVS : TEXCOORD3;
- 在片元着色器中,将模型顶点 本地空间 转化为 观察空间
o.positionVS = TransformWorldToView(TransformObjectToWorld(o.positionOS));
3、结合两者求出 深度图中像素的 XYZ值
- 我们来推导一下公式
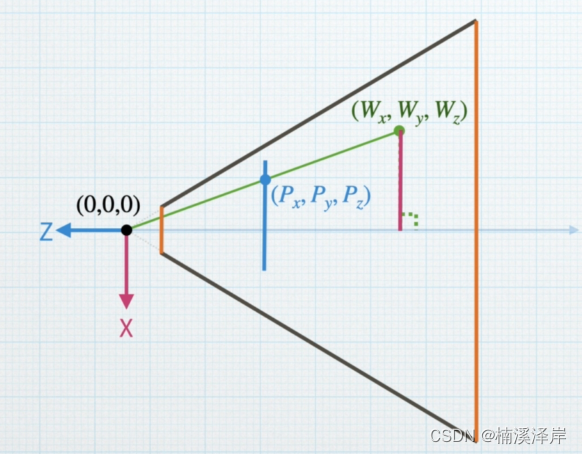
- 点 P P P 是模型上的点在观察空间下的值
- W z W_z Wz 是深度图在观察空间下的Z值
-
我们先在 X o Z XoZ XoZ 平面下求出我们的 W x W_x Wx 值
P z W z = P x W x \frac{P_z}{W_z}=\frac{P_x}{W_x} WzPz=WxPx
W x = P x W z P z W_x = \frac{P_xW_z}{P_z} Wx=PzPxWz
P z P_z Pz 为负数, W z W_z Wz为正数
我们需要的比值只是一个长度关系。所以,需要乘以一个 − 1 -1 −1
W x = P x W z − P z W_x = \frac{P_xW_z}{-P_z} Wx=−PzPxWz -
然后,在 Y o Z YoZ YoZ 平面下求出我们的 W y W_y Wy 值
W y = P y W z − P z W_y = \frac{P_yW_z}{-P_z} Wy=−PzPyWz
depthVS.xy = i.positionVS.xy*depthZ/-i.positionVS.z;
4、再将此坐标转换到模型的本地空间,把XY作为UV来进行纹理采样
float4 depthWS = mul(unity_CameraToWorld,depthVS);
float4 depthOS = mul(unity_WorldToObject,depthWS);
float2 uv = depthOS.xy+0.5;
half4 mainTex = SAMPLE_TEXTURE2D(_MainTex,sampler_MainTex,uv);
四、最终效果
//深度贴花
Shader "MyShader/URP/P4_4_2"
{Properties{[Header(MainTex)]_MainTex("MainTex",2D) = "white"{}}SubShader{Tags{//告诉引擎,该Shader只用于 URP 渲染管线"RenderPipeline"="UniversalPipeline"//渲染类型"RenderType"="Transparent"//渲染队列"Queue"="Transparent"}Pass{Blend One OneZWrite OffName "Unlit"HLSLPROGRAM#pragma vertex vert#pragma fragment frag#pragma multi_compile_fog// Pragmas#pragma target 2.0// Includes#include "Packages/com.unity.render-pipelines.core/ShaderLibrary/Color.hlsl"#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Core.hlsl"#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Input.hlsl"CBUFFER_START(UnityPerMaterial)float4 _MainTex_ST;CBUFFER_ENDTEXTURE2D(_MainTex);SAMPLER(sampler_MainTex);TEXTURE2D(_CameraDepthTexture);SAMPLER(sampler_CameraDepthTexture);//struct appdata//顶点着色器的输入struct Attributes{float3 positionOS : POSITION;float2 uv : TEXCOORD0;};//struct v2f//片元着色器的输入struct Varyings{float4 positionCS : SV_POSITION;float2 uv : TEXCOORD0;float fogCoord : TEXCOORD1;float3 positionOS : TEXCOORD2;float3 positionVS : TEXCOORD3;};//v2f vert(Attributes v)//顶点着色器Varyings vert(Attributes v){Varyings o = (Varyings)0;o.positionCS = TransformObjectToHClip(v.positionOS);o.uv = TRANSFORM_TEX(v.uv, _MainTex);o.fogCoord = ComputeFogFactor(o.positionCS.z);o.positionOS = v.positionOS;//2、通过模型面片的求出像素在观察空间下的坐标值o.positionVS = TransformWorldToView(TransformObjectToWorld(o.positionOS));return o;}//fixed4 frag(v2f i) : SV_TARGET//片元着色器half4 frag(Varyings i) : SV_TARGET{//思路:float4 depthVS = 1;//1、通过深度图求出像素所在视图空间的Z值float2 screenUV = i.positionCS.xy / _ScreenParams.xy;half4 depthTex = SAMPLE_TEXTURE2D(_CameraDepthTexture, sampler_CameraDepthTexture, screenUV);half depthZ = LinearEyeDepth(depthTex.r, _ZBufferParams);//2、通过模型面片的求出像素在观察空间下的坐标值//这个在顶点着色器中完成//3、结合两者求出 深度图中像素的 XYZ值depthVS.z = depthZ;depthVS.xy = i.positionVS.xy * depthZ / -i.positionVS.z;//4、再将此坐标转换到模型的本地空间,把XY作为UV来进行纹理采样float4 depthWS = mul(unity_CameraToWorld, depthVS);float4 depthOS = mul(unity_WorldToObject, depthWS);float2 uv = depthOS.xy + 0.5;half4 col = 0;half4 mainTex = SAMPLE_TEXTURE2D(_MainTex, sampler_MainTex, uv);col += mainTex;return col;}ENDHLSL}}
}
相关文章:
Unity中URP下实现深度贴花
文章目录 前言一、场景设置二、实现思路1、通过深度图求出像素所在视图空间的Z值2、通过模型面片的求出像素在观察空间下的坐标值3、结合两者求出 深度图中像素的 XYZ值4、再将此坐标转换到模型的本地空间,把XY作为UV来进行纹理采样 三、URP下实现1、通过深度图求出…...

openssl3.2 - 官方demo学习 - cipher - aesccm.c
文章目录 openssl3.2 - 官方demo学习 - cipher - aesccm.c概述笔记END openssl3.2 - 官方demo学习 - cipher - aesccm.c 概述 aesccm.c 是 AES-192-CCM 的加解密应用例子, 用的EVP接口. 看到不仅仅要用到key, iv, data, 在此之前还要设置 nonce, tag, 认证数据. 为啥需要设置…...
)
点云从入门到精通技术详解100篇-基于多传感器融合的智能汽车 环境感知(下)
目录 基于激光雷达点云的目标检测 4.1 点云神经网络检测模型 4.2 点云预处理...
蓝桥杯单片机组备赛——蜂鸣器和继电器的基本控制
文章目录 一、蜂鸣器和继电器电路介绍二、题目与答案2.1 题目2.2 答案2.3 重点函数解析 一、蜂鸣器和继电器电路介绍 可以发现两个电路一端都接着VCC,所以我们只要给另一端接上低电平就可以让蜂鸣器和继电器进行工作。与操作LED类似,只不过换了一个74HC5…...

嵌入式linux 编译qt5(以v851s为例)
本文参考Blev大神的博客:Yuzuki Lizard V851S开发板 --移植 QT5.12.9教程(群友Blev提供) - Allwinner / 柚木PI-V851S - 嵌入式开发问答社区 (100ask.net) 一. 环境准备 1.下载qt5源码:Open Source Development | Open Source …...

uniapp 实战 -- app 的自动升级更新(含生成 app 发布页)
uniapp 提供了 App升级中心 uni-upgrade-center ,可以便捷实现app 的自动升级更新,具体编码和配置如下: 1. 用户端 – 引入升级中心插件 下载安装插件 uni-upgrade-center - App https://ext.dcloud.net.cn/plugin?id4542 pages.json 中添加…...

微服务http调用其他服务的方法
在对应需要调的服务配置文件加上路径 #审批方案微服务配置 server.port: 9004 upload.path: /alldev/u01/ schedule.cron.countDown: 0 0 8-18 * * ? statistics.syskey: ywsp schedule.countDown.isExecute: true post.url.updateStatus: http://10.3.2.222:8888/ecological…...

vagrant 用户名密码登录
正常登录后 sudo -i 切换到root权限 vim /etc/ssh/vim sshd_config 将PasswordAuthentication no设置 为yes 重启sshd.service服务 systemctl restart sshd.service...

强化学习应用(三):基于Q-learning的无人机物流路径规划研究(提供Python代码)
一、Q-learning简介 Q-learning是一种强化学习算法,用于解决基于马尔可夫决策过程(MDP)的问题。它通过学习一个价值函数来指导智能体在环境中做出决策,以最大化累积奖励。 Q-learning算法的核心思想是通过不断更新一个称为Q值的…...

探索SQL性能优化之道:实用技巧与最佳实践
SQL性能优化可能是每个数据库管理员和开发者在日常工作中必不可少的一个环节。在大数据时代,为确保数据库系统的响应速度和稳定性,掌握一些实用的SQL优化技巧至关重要。 本文将带着开发人员走进SQL性能优化的世界,深入剖析实用技巧和最佳实践…...
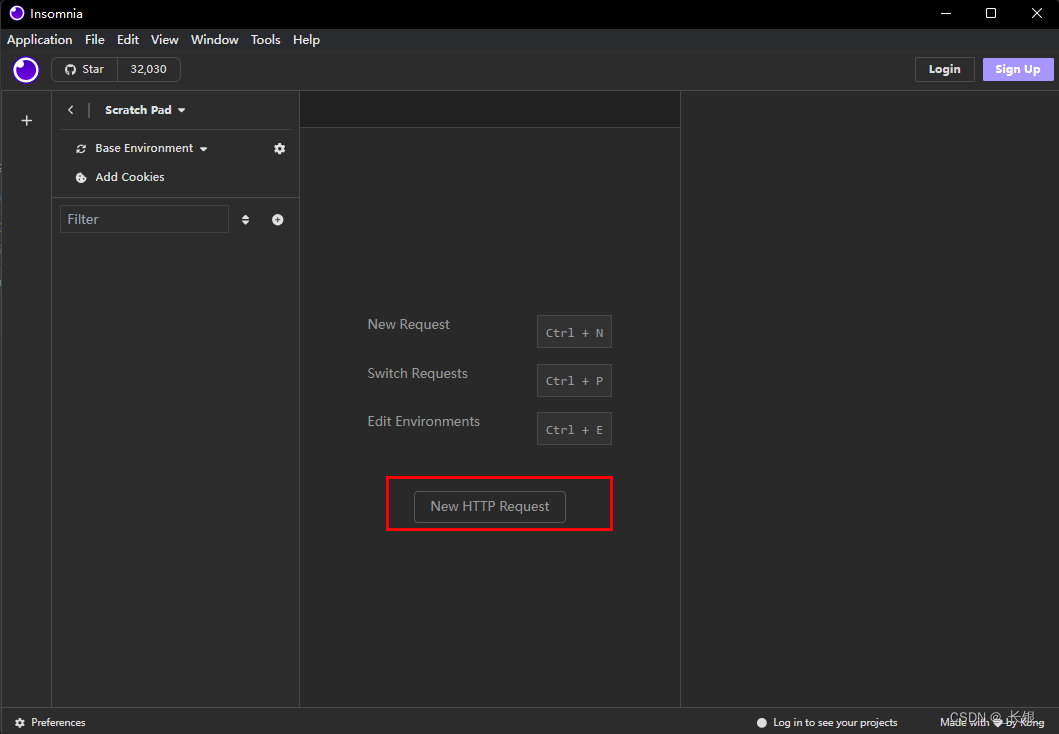
Github项目推荐-Insomnia
项目地址 GitHub地址:GitHub - Kong/insomnia 官网:The Collaborative API Development Platform - Insomnia 项目简述 想必大家都知道PostMan吧。Insomnia可以说是PostMan的开源平替。页面ui很不错,功能强大,使用也比较方便。…...
python 语法
闭包 在函数嵌套的前提下,内部函数使用了外部函数的变量,并且外部函数返回了内部函数,我们把这个使用外部函数变量的内部函数称为闭包。 def outfunc(arg):def innerFunc(msg):print(f"<{msg}> {arg} <{msg}>")retu…...
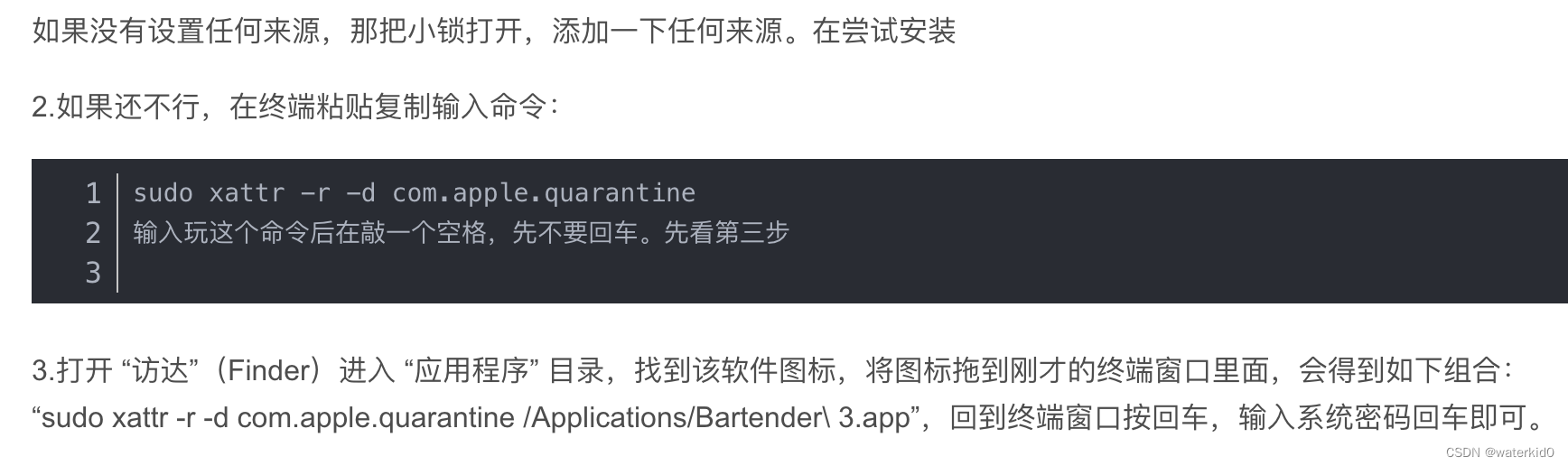
Mac下载Navicat premium提示文件损坏的解决方案
引用:https://blog.csdn.net/weixin_44898291/article/details/120879508 sudo xattr -r -d com.apple.quarantine...

算法——贪心法(Greedy)
贪心法 把整个问题分解成多个步骤,在每个步骤都选取当前步骤的最优方案,直到所有步骤结束;在每一步都不考虑对后续步骤的影响,在后续步骤中也不再回头改变前面的选择。不足之处: 贪心算法并不能保证获得全局最优解&…...

VmWare虚拟机的安装
VmWare官方最新版下载地址 vmware官方下载地址 安装流程 安装成功验证 安装完成之后,打开网络中心,一定要确认这里多出两个网络连接,才证明Vmware已经安装成功...
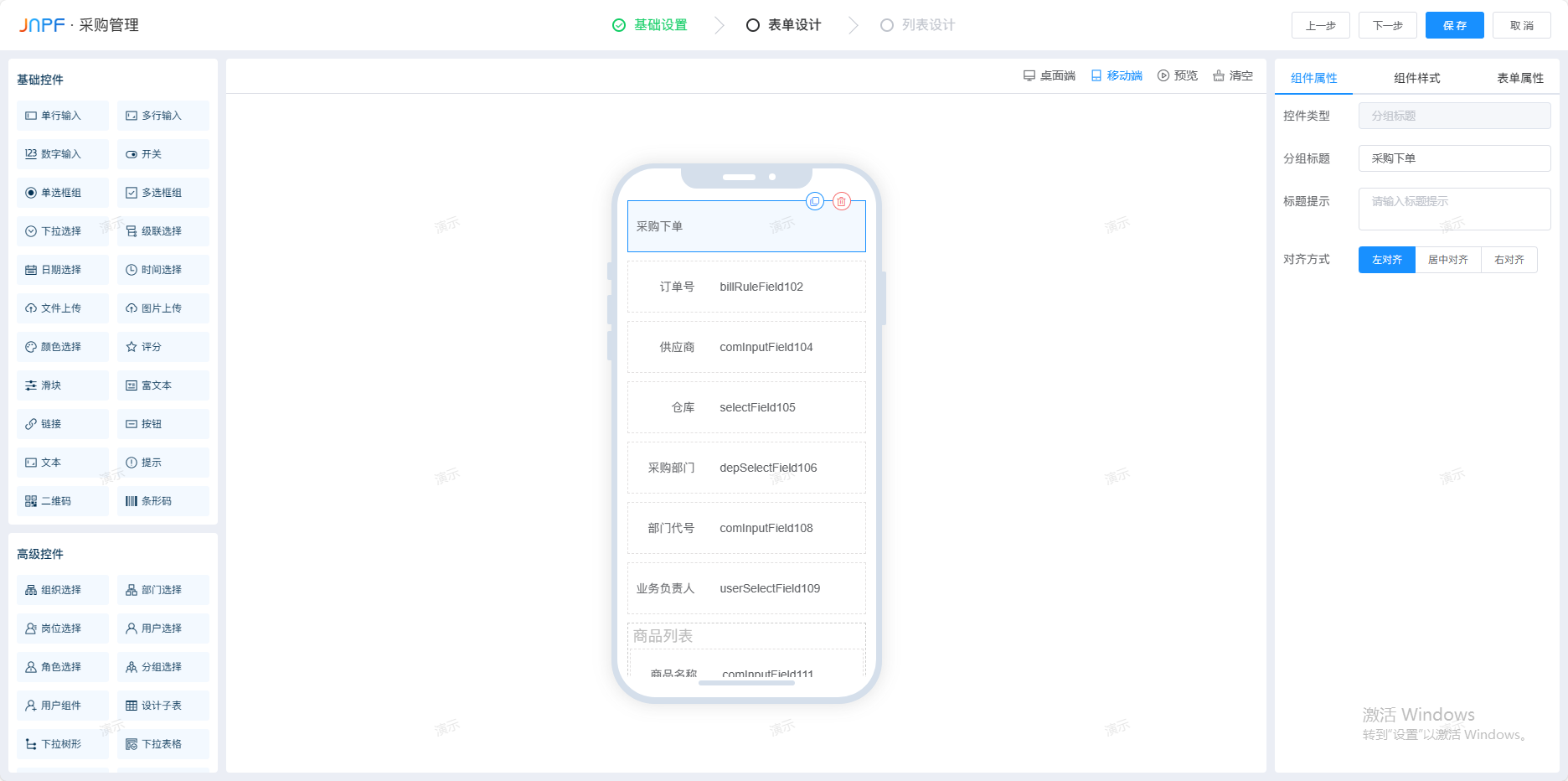
Vue.js轻量级框架:快速搭建可扩展的管理系统
一、前言 在项目实战开发中,尤其是大平台系统的搭建,针对不同业务场景,需要为用户多次编写用于录入、修改、展示操作的相应表单页面。一旦表单需求过多,对于开发人员来说,算是一种重复开发,甚至是繁杂的工作…...
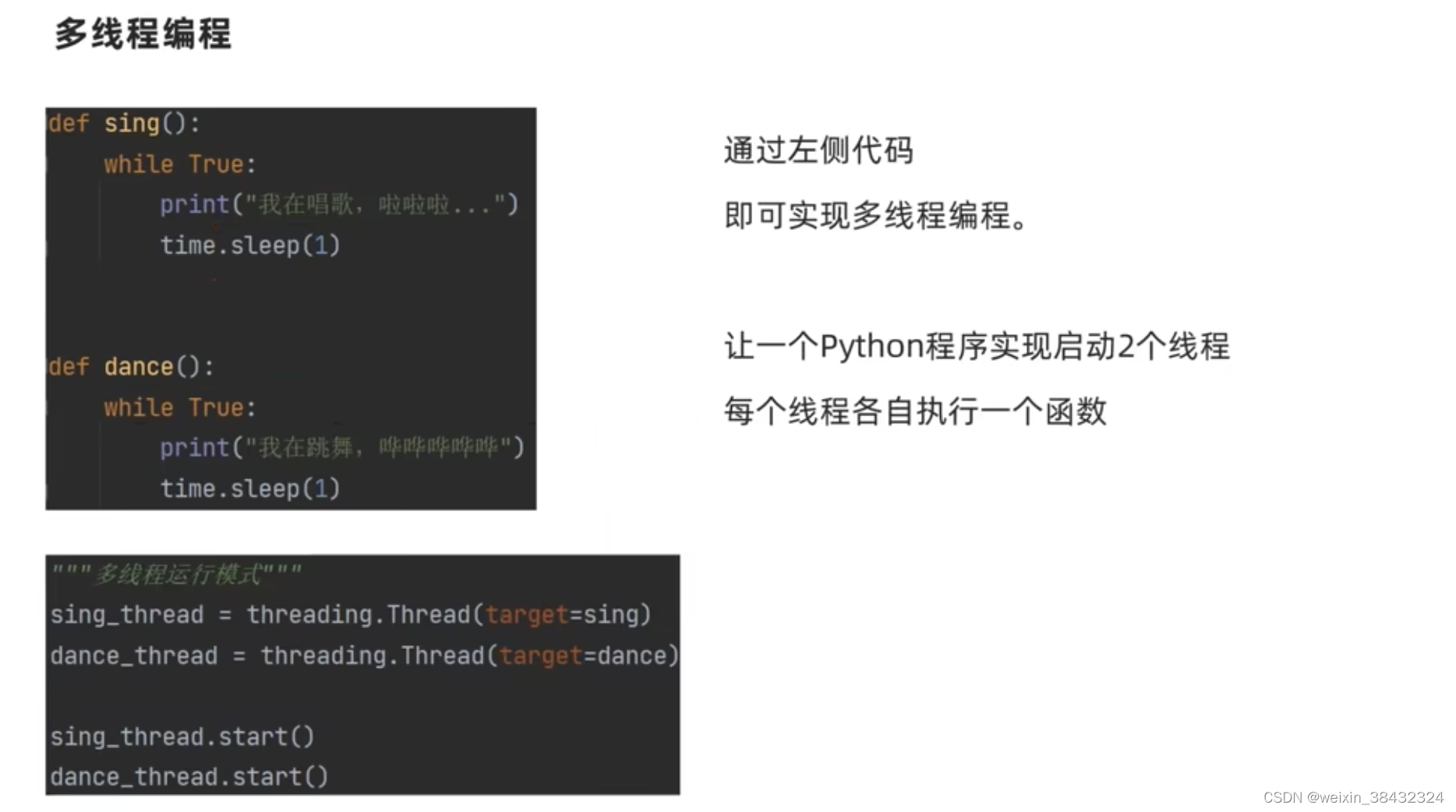
Android-多线程
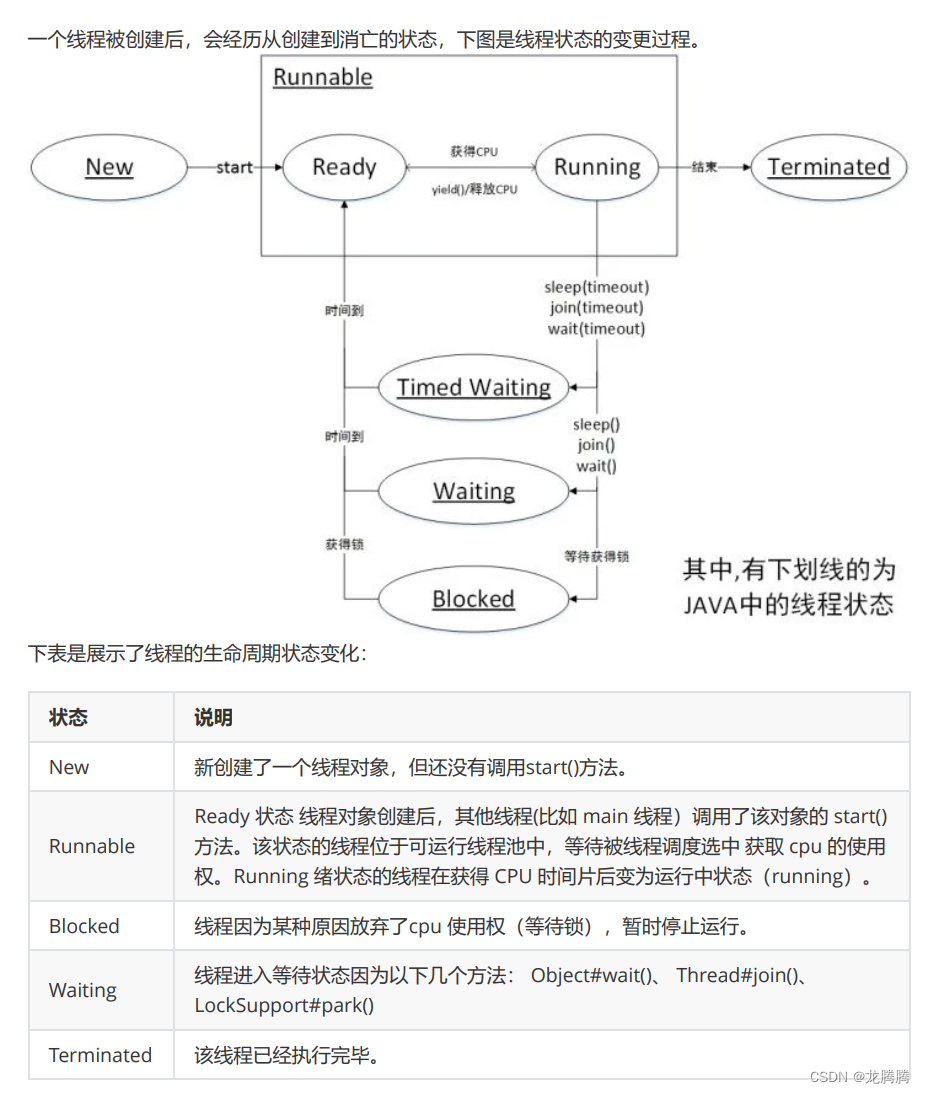
线程是进程中可独立执行的最小单位,也是 CPU 资源(时间片)分配的基本单位,同一个进程中的线程可以共享进程中的资源,如内存空间和文件句柄。线程有一些基本的属性,如id、name、以及priority。 id࿱…...

sqlalchemy 监听所有实体插入以及更新事件
这边使用的是flaskdependency-injectersqlalchemy,有一个公共类,想插入或者更新的时候对公共类某些字段进行统一操作 这个是公共类:包括一些基础字段,所有的实体都会继承这个类 """Models module.""&q…...

go怎么结束很多个协程呢
在Go语言中,可以通过使用context来结束多个协程。context包提供了用于跟踪、取消和传递截止日期的机制,可用于协程的生命周期管理。 以下是一个使用context取消多个协程的示例: package mainimport ("context""fmt"&qu…...

springboot 项目访问静态资源遇到的问题,WebMvcConfigurer和WebMvcConfigurationSupport
之前发过通过继承WebMvcConfigurationSupport来访问静态资源的文章——img标签访问静态资源,代码如下 Configuration public class LocalPathWebMvcConfigurer extends WebMvcConfigurationSupport {/*** 在springboot项目中,允许浏览器访问指定本地文件…...

终极指南:如何在浏览器中快速将HTML转换为Word文档
终极指南:如何在浏览器中快速将HTML转换为Word文档 【免费下载链接】html-docx-js Converts HTML documents to DOCX in the browser 项目地址: https://gitcode.com/gh_mirrors/ht/html-docx-js 你是否需要将网页内容导出为可编辑的Word文档?htm…...

OpenClaw开源贡献:Qwen3.5-4B-Claude技能PR提交流程
OpenClaw开源贡献:Qwen3.5-4B-Claude技能PR提交流程 1. 为什么要为OpenClaw贡献技能 去年冬天,我在尝试用OpenClaw自动化处理技术文档时,发现现有的技能库缺少对结构化推理任务的支持。当时我偶然在GitHub上看到了Qwen3.5-4B-Claude这个专门…...

SMUDebugTool效能优化手册:3大核心场景的性能突破之道
SMUDebugTool效能优化手册:3大核心场景的性能突破之道 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://gi…...

FDTD仿真中谐振腔Q值计算:从低Q到高Q的完整实践指南
1. 谐振腔Q值计算的核心概念 第一次接触谐振腔Q值计算时,我被各种公式和图表搞得晕头转向。直到在实验室熬了三个通宵后,才真正理解Q值就像是一个"能量储存能力"的评分卡——分数越高,能量泄漏越慢。在FDTD仿真中,我们…...

常见电机分类
文章目录电机分类电机分类 序号分类优点缺点驱动方式举例1直流电机结构简单、成本低、启动扭矩大、控制方便有电刷磨损,产生火花和噪音,寿命较短,高速下维护成本高PWM调速、H桥驱动(正/反转)玩具车、电动工具、风扇2步进精确的位置控制能力&…...

3种方案实现小米智能家居与Home Assistant无缝集成
3种方案实现小米智能家居与Home Assistant无缝集成 【免费下载链接】ha_xiaomi_home Xiaomi Home Integration for Home Assistant 项目地址: https://gitcode.com/GitHub_Trending/ha/ha_xiaomi_home 你是否遇到过智能家居设备品牌碎片化的困扰?是否希望用统…...

解锁Blender操作可视化:6大核心价值与7个实战技巧提升300%教程质量
解锁Blender操作可视化:6大核心价值与7个实战技巧提升300%教程质量 【免费下载链接】Screencast-Keys Blender Add-on: Screencast Keys 项目地址: https://gitcode.com/gh_mirrors/sc/Screencast-Keys 在数字创作领域,操作可视化是连接创作者与观…...

如何用智能工具提升暗黑破坏神3战斗效率:D3KeyHelper全功能指南
如何用智能工具提升暗黑破坏神3战斗效率:D3KeyHelper全功能指南 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 暗黑破坏神3的战斗节奏快…...

【项目实战】ESP8266 WiFi模块从零接入物联网 - 硬件连接、固件烧录与云端通信
1. ESP8266 WiFi模块入门指南 第一次拿到ESP8266这个小玩意儿时,我完全没想到它能在物联网领域掀起这么大风浪。这个比硬币大不了多少的模块,内置了完整的WiFi功能,价格还不到一杯奶茶钱。记得去年帮学弟调试毕业设计时,我们用ESP…...

SDMatte在UI设计中应用:图标/按钮/插画透明底素材批量生成实战
SDMatte在UI设计中应用:图标/按钮/插画透明底素材批量生成实战 1. 为什么UI设计师需要专业抠图工具 在日常UI设计工作中,我们经常需要处理各种素材的透明背景问题。无论是制作应用图标、设计交互按钮,还是创建插画元素,干净的透…...