【RT-DETR有效改进】ShapeIoU、InnerShapeIoU关注边界框本身的IoU(包含二次创新)
前言
大家好,我是Snu77,这里是RT-DETR有效涨点专栏。
本专栏的内容为根据ultralytics版本的RT-DETR进行改进,内容持续更新,每周更新文章数量3-10篇。
专栏以ResNet18、ResNet50为基础修改版本,同时修改内容也支持ResNet32、ResNet101和PPHGNet版本,其中ResNet为RT-DETR官方版本1:1移植过来的,参数量基本保持一致(误差很小很小),不同于ultralytics仓库版本的ResNet官方版本,同时ultralytics仓库的一些参数是和RT-DETR相冲的所以我也是会教大家调好一些参数,真正意义上的跑ultralytics的和RT-DETR官方版本的无区别。
欢迎大家订阅本专栏,一起学习RT-DETR!
一、本文介绍
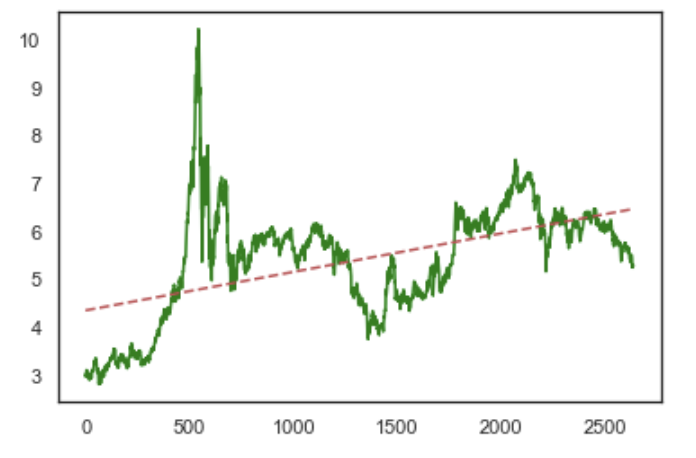
本文给大家带来的改进机制是ShapeIoU其是一种关注边界框本身形状和尺度的边界框回归方法(IoU),同时本文的内容包括过去到现在的百分之九十以上的损失函数的实现,使用方法非常简单,在本文的末尾还会教大家在改进模型时何时添加损失函数才能达到最好的效果,以下为修改了我的调参结果训练的结果图像。

官方链接:RT-DETR剑指论文专栏,持续复现各种顶会内容——论文收割机RT-DETR
目录
一、本文介绍
二、ShapeIoU
三、ShapeIoU的核心代码
四、ShapeIoU的使用方式
4.1 修改一
4.2 修改二
五、总结
二、ShapeIoU
 官方论文地址: 官方论文地址
官方论文地址: 官方论文地址
官方代码地址: 官方代码地址
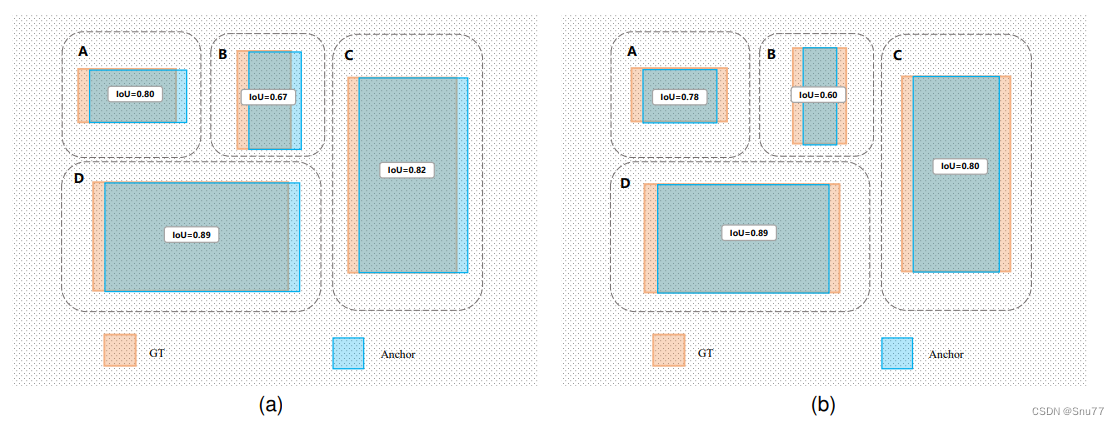
这幅图展示了在目标检测任务中,两种不同情况或方法下的边界框回归的对比。
GT (Ground Truth): 用桃色框表示,指的是图像中物体实际的位置和形状。在目标检测中,算法试图尽可能准确地预测这个框。
Anchor: 蓝色框代表一个预定义的框,是算法预设的一系列框,用于与GT框进行匹配,寻找最佳的候选框。
在图中,我们看到四个不同的情况(A、B、C、D),每个都显示了一个anchor与GT的对比,并给出了IoU(交并比)的数值。IoU是一个常用的度量,用来评估预测边界框与真实边界框之间的重叠程度。
论文中给了一堆公式,我也看不太懂,大家有兴趣可以看看。
三、ShapeIoU的核心代码
其中缺少一个模块ops,大家根据自己结构代码中进行导入即可。
import numpy as np
import torch
import mathclass WIoU_Scale:''' monotonous: {None: origin v1True: monotonic FM v2False: non-monotonic FM v3}momentum: The momentum of running mean'''iou_mean = 1.monotonous = False_momentum = 1 - 0.5 ** (1 / 7000)_is_train = Truedef __init__(self, iou):self.iou = iouself._update(self)@classmethoddef _update(cls, self):if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \cls._momentum * self.iou.detach().mean().item()@classmethoddef _scaled_loss(cls, self, gamma=1.9, delta=3):if isinstance(self.monotonous, bool):if self.monotonous:return (self.iou.detach() / self.iou_mean).sqrt()else:beta = self.iou.detach() / self.iou_meanalpha = delta * torch.pow(gamma, beta - delta)return beta / alphareturn 1def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, EIoU=False, SIoU=False, WIoU=False, ShapeIoU=False,hw=1, mpdiou=False, Inner=False, alpha=1, ratio=0.7, eps=1e-7, scale=0.0):"""Calculate Intersection over Union (IoU) of box1(1, 4) to box2(n, 4).Args:box1 (torch.Tensor): A tensor representing a single bounding box with shape (1, 4).box2 (torch.Tensor): A tensor representing n bounding boxes with shape (n, 4).xywh (bool, optional): If True, input boxes are in (x, y, w, h) format. If False, input boxes are in(x1, y1, x2, y2) format. Defaults to True.GIoU (bool, optional): If True, calculate Generalized IoU. Defaults to False.DIoU (bool, optional): If True, calculate Distance IoU. Defaults to False.CIoU (bool, optional): If True, calculate Complete IoU. Defaults to False.EIoU (bool, optional): If True, calculate Efficient IoU. Defaults to False.SIoU (bool, optional): If True, calculate Scylla IoU. Defaults to False.eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.Returns:(torch.Tensor): IoU, GIoU, DIoU, or CIoU values depending on the specified flags."""if Inner:if not xywh:box1, box2 = ops.xyxy2xywh(box1), ops.xyxy2xywh(box2)(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)b1_x1, b1_x2, b1_y1, b1_y2 = x1 - (w1 * ratio) / 2, x1 + (w1 * ratio) / 2, y1 - (h1 * ratio) / 2, y1 + (h1 * ratio) / 2b2_x1, b2_x2, b2_y1, b2_y2 = x2 - (w2 * ratio) / 2, x2 + (w2 * ratio) / 2, y2 - (h2 * ratio) / 2, y2 + (h2 * ratio) / 2# Intersection areainter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * \(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp_(0)# Union Areaunion = w1 * h1 * ratio * ratio + w2 * h2 * ratio * ratio - inter + epsiou = inter / union# Get the coordinates of bounding boxeselse:if xywh: # transform from xywh to xyxy(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_else: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + epsw2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps# Intersection areainter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * \(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp_(0)# Union Areaunion = w1 * h1 + w2 * h2 - inter + eps# IoUiou = inter / unionif CIoU or DIoU or GIoU or EIoU or SIoU or ShapeIoU or mpdiou or WIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU or EIoU or SIoU or mpdiou or WIoU or ShapeIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squaredrho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha = v / (v - iou + (1 + eps))return iou - (rho2 / c2 + v * alpha) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = cw ** 2 + epsch2 = ch ** 2 + epsreturn iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIoUelif SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + epss_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)return iou - 0.5 * (distance_cost + shape_cost) + eps # SIoUelif ShapeIoU:#Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distance #Shape-Distanceww = 2 * torch.pow(w2, scale) / (torch.pow(w2, scale) + torch.pow(h2, scale))hh = 2 * torch.pow(h2, scale) / (torch.pow(w2, scale) + torch.pow(h2, scale))cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex widthch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex heightc2 = cw ** 2 + ch ** 2 + eps # convex diagonal squaredcenter_distance_x = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2) / 4center_distance_y = ((b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4center_distance = hh * center_distance_x + ww * center_distance_ydistance = center_distance / c2#Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shape #Shape-Shapeomiga_w = hh * torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = ww * torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)return iou - distance - 0.5 * shape_costelif mpdiou:d1 = (b2_x1 - b1_x1) ** 2 + (b2_y1 - b1_y1) ** 2d2 = (b2_x2 - b1_x2) ** 2 + (b2_y2 - b1_y2) ** 2return iou - d1 / hw.unsqueeze(1) - d2 / hw.unsqueeze(1) # MPDIoUelif WIoU:self = WIoU_Scale(1 - iou)dist = getattr(WIoU_Scale, '_scaled_loss')(self)return iou * dist # WIoU https://arxiv.org/abs/2301.10051return iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areareturn iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdfreturn iou # IoU
四、ShapeIoU的使用方式
4.1 修改一
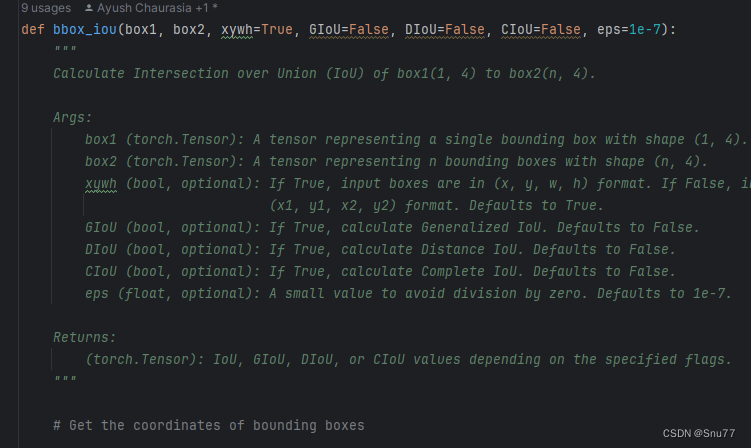
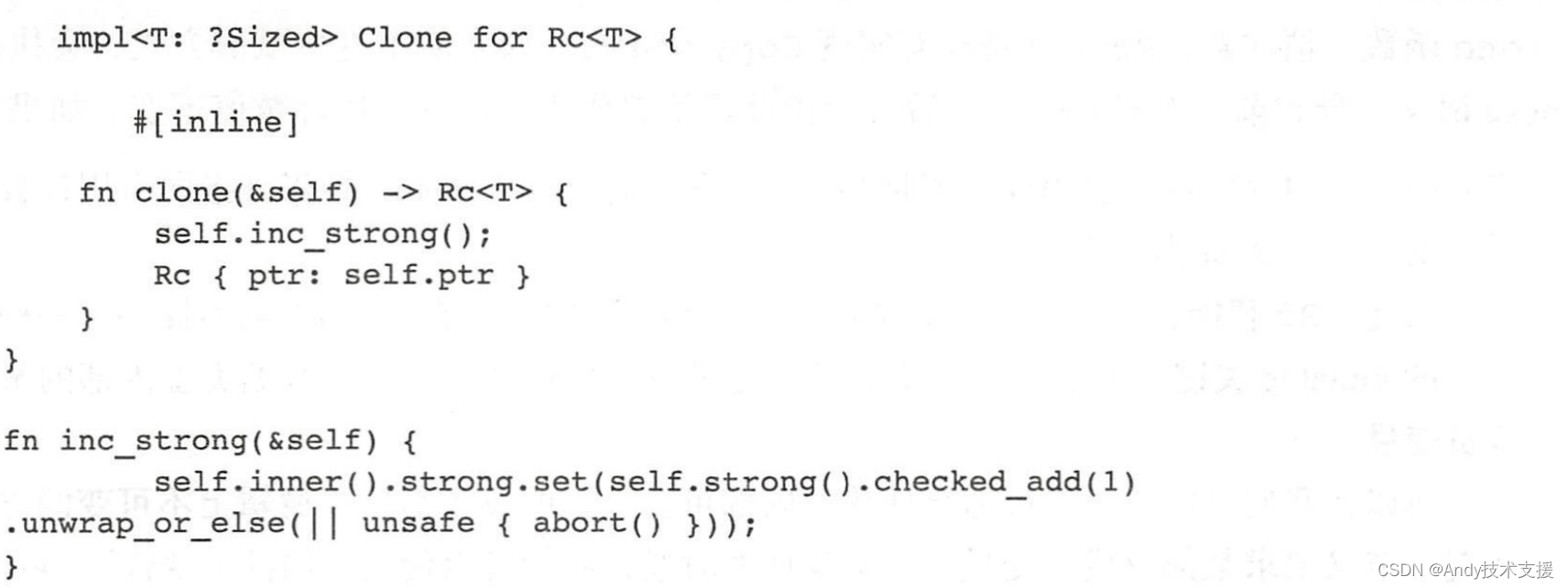
第一步我们需要找到如下的文件ultralytics/utils/metrics.py,找到如下的代码,下面的图片是原先的代码部分截图的正常样子,然后我们将上面的整个代码块将下面的整个方法(这里这是部分截图)内容全部替换。
4.2 修改二
第二步我们找到另一个文件如下->"ultralytics/models/utils/loss.py",(注意这个文件和YOLOv8的修改内容不是一个!!!!)我们找到如下的代码块,初始样子如下,然后用我下面给的代码块替换红框内的代码。
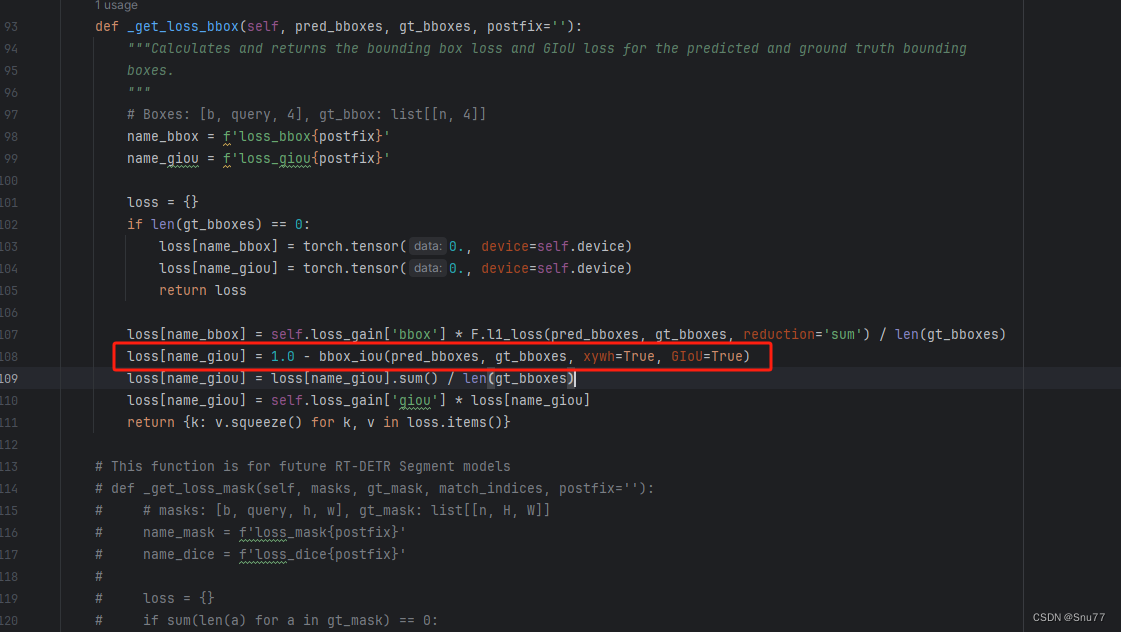
loss[name_giou] = 1.0 - bbox_iou(pred_bboxes, gt_bboxes,xywh=False, GIoU=False, DIoU=False, CIoU=False, EIoU=False, SIoU=False,WIoU=False, ShapeIoU=True, hw=2, mpdiou=False, Inner=False,ratio=0.75, eps=1e-7, scale=0.0)替换完成的样子如下所示。

到此我们就可以进行设置使用了,看到我这里以及将ShapeIoU都设置成True了,同时我们使用Inner思想将其设置为True即可,此时使用的就是InnerShapeIoU。
如果inner为False,ShapeIoU为True那么使用的就是ShapeIoU。

五、总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的RT-DETR改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~
RT-DETR改进专栏:RT-DETR专栏——持续复现各种顶会内容——论文收割机

相关文章:
【RT-DETR有效改进】ShapeIoU、InnerShapeIoU关注边界框本身的IoU(包含二次创新)
前言 大家好,我是Snu77,这里是RT-DETR有效涨点专栏。 本专栏的内容为根据ultralytics版本的RT-DETR进行改进,内容持续更新,每周更新文章数量3-10篇。 专栏以ResNet18、ResNet50为基础修改版本,同时修改内容也支持Re…...
从理论到实践:数字孪生技术的全面应用探讨
数字孪生是一种将实际物体或系统的数字模型与其实时运行状态相结合的概念。这一概念的核心在于创建一个虚拟的、与真实世界相对应的数字副本,以便监测、分析和优化实体系统的性能。 简单理解,数字孪生就是在一个设备或系统的基础上,创造一个…...
2.1.2 一个关于y=ax+b的故事
跳转到根目录:知行合一:投资篇 已完成: 1、投资&技术 1.1.1 投资-编程基础-numpy 1.1.2 投资-编程基础-pandas 1.2 金融数据处理 1.3 金融数据可视化 2、投资方法论 2.1.1 预期年化收益率 2.1.2 一个关于yaxb的…...
Rust-解引用
“解引用”(Deref)是“取引用”(Ref)的反操作。取引用,我们有&、&mut等操作符,对应的,解引用,我们有操作符,跟C语言是一样的。示例如下: 比如说,我们有引用类型p:&i32;,那么可以用符…...

记录一下vue项目引入百度地图
公共部分 #allmap { width: 500px; height: 500px; font-family: "微软雅黑"; } 1、 <div id"allmap"> <baidu-map :center"center" :zoom"zoom" ready"handler"></baidu-map> </div> data()…...

基于Docker官方php:7.4.33-fpm镜像构建支持67个常见模组的php7.4.33镜像
实践说明:基于RHEL7(CentOS7.9)部署docker环境(23.0.1、24.0.2),所构建的php7.4.33镜像应用于RHEL7-9(如AlmaLinux9.1),但因为docker的特性,适用场景是不限于此的。 文档形成时期:2017-2023年 因系统或软件版本不同&am…...

opencv通过轮廓点生成闭合图像
前言 有时候需要将某一些点生成闭合的二值图像。记录一下。 // 轮廓点个数 int nrCurvePoints curContour.nr; // 轮廓点 DIM2DL* curvePoints curContour.pts;std::vector<cv::Point> points; // 轮廓点集合 for (int cntPoint 0; cntPoint < nrCurvePoints; cn…...
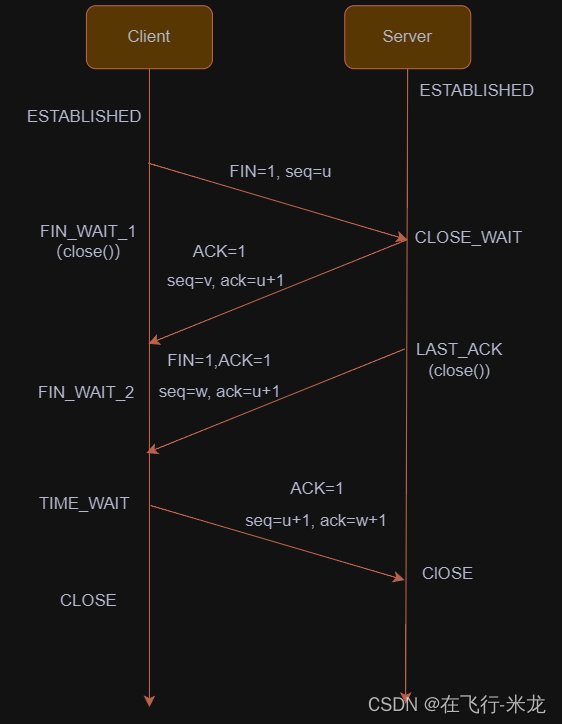
Python 网络编程之TCP详细讲解
【一】传输层 【1】概念 传输层是OSI五层模型中的第四层,负责在网络中的两个端系统之间提供数据传输服务主要协议包括**TCP(传输控制协议)和UDP(用户数据报协议)** 【2】功能 **端到端通信:**传输层负责…...

直饮水系统服务认证:提升水质与安全的必要举
直饮水系统作为一种便捷、卫生的饮水方式,已经越来越受到人们的欢迎。然而,随着市场的发展,直饮水系统的质量和服务也面临着一些挑战。因此,直饮水系统服务认证应运而生,成为了提升水质与安全的必要举措。 一、直饮水…...
Qt 调试系统输出报警声以及添加资源
文章目录 前言一、方法1 使用 Qsound1.添加都文件 直接报错2.解决这个错误 添加 QT multimedia3. 加入代码又遇到新的错误小结 二、第二种方法1.引入库2.添加资源2.1依次点击Qt--->Qt Resource File--->Choose2.2给资源文件起个名字,如:res&#…...
Linux下文件的创建写入读取编程
在linux下操作一个文件,首先要保证文件的存在(不存在就创建),接着打开文件(打开成功)并得到文件描述符,接着在进行读写操作,最后还需要关闭文件。如果我们对文件进行读写之后不关闭文…...

python 解析
list(pd.DataFrame) # 所有列名切片:print("显式 切片:\n", df.loc[:, "number":"sum"]) 所有行,列是从number 到sum ,前闭后开print("隐式 切片:\n", df.iloc[:, 1:3]) # 结果和上面一样转化成字典…...
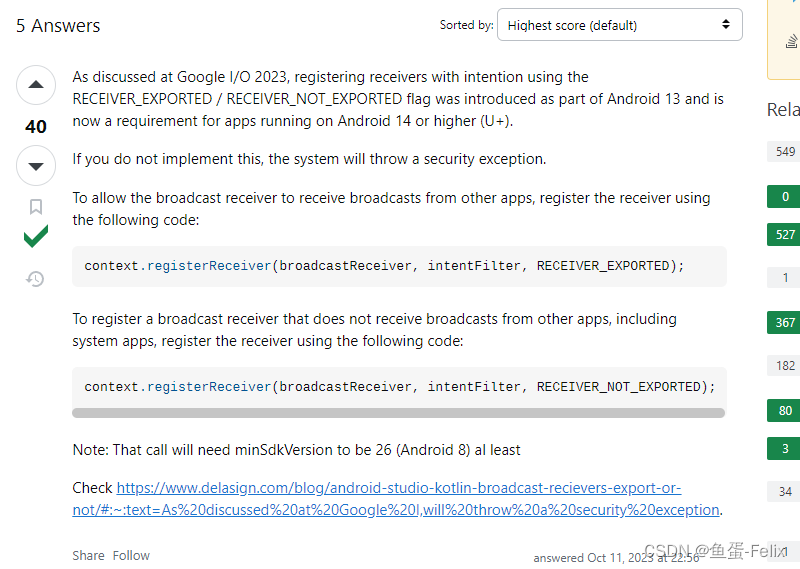
谷歌aab包在Android 14闪退而apk没问题(targetsdk 34)
问题原因 Unity应用(target SDK 34)上线到GooglePlay,有用户反馈fold5设备上(Android14系统)疯狂闪退,经测试,在小米手机Android14系统的版本复现成功了,奇怪的是apk直接安装没问题,而打包成aa…...

34.在排序数组中查找元素的第一个和最后一个位置
34.在排序数组中查找元素的第一个和最后一个位置 给你一个按照非递减顺序排列的整数数组 nums,和一个目标值 target。请你找出给定目标值在数组中的开始位置和结束位置。 如果数组中不存在目标值 target,返回 [-1, -1]。 你必须设计并实现时间复杂度为…...

js树过滤
// 递归过滤得到每一项的hidden为false的数据 function filterTree(arr) { return arr.filter(item > { if (item.children) { item.children filterTree(item.children) } if (!item.hidden) { return true } }) }...

Java多线程并发篇----第十六篇
系列文章目录 文章目录 系列文章目录前言一、线程等待(wait)二、线程睡眠(sleep)三、线程让步(yield)四、线程中断(interrupt)五、Join 等待其他线程终止前言 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站,这…...

测评结果:免费的“文心一言3.5”香,但是付费的产品质量更高
文章目录 前言一、文心一言3.5生成的图片和文章1.文心一言生成的图片在文心一言3.5中输入以下内容:我的测评结果: 2.文心一言生成的文章在文心一言3.5中输入以下内容:我的测评结果: 二、ChatGPT生成的图片和文章1.ChatGPT4.0 生成…...
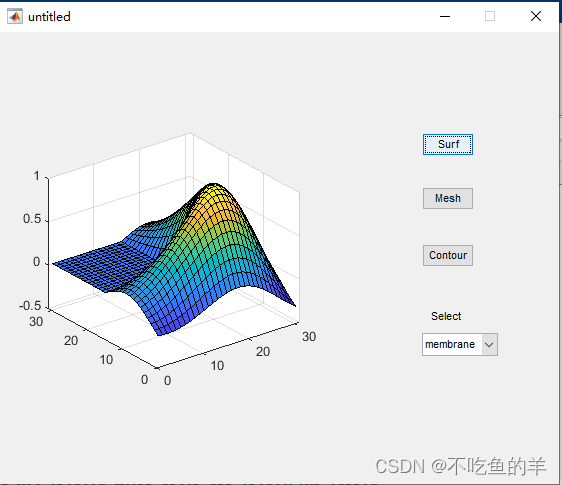
Matlab GUI设计基础范例(可以一步一步跟着做)
我们要做一个GUI界面,可以选择peaks、membrane和sinc三种三维图数据,选择画出surf、mesh和contour三种图像。 打开GUI 每个版本打开方式可能都不一样,但有一个是相同的,就是在命令行输入guide回车。 绘制控件 大概就绘制成这样…...
@Transactional(rollbackFor = {Exception.class})与 @Transactional区别
在Spring框架中,Transactional 注解用于标记方法或类,以表明该方法或类内包含的数据库操作应当在一个事务中执行。事务的基本原则是“原子性”,即所有操作要么全部成功,要么全部失败。 1. Transactional(不指定 rollb…...

数据结构——二叉树(先序、中序、后序及层次四种遍历(C语言版))超详细~ (✧∇✧) Q_Q
目录 二叉树的定义: *特殊的二叉树: 二叉树的性质: 二叉树的声明: 二叉树的先序遍历: 二叉树的中序遍历: 二叉树的后序遍历: 二叉树的层序遍历: 二叉树的节点个数: 二叉…...

如何利用AI工具变现:一个老程序员的真实观察
凌晨两点,你又刷到一个"AI月入5万"的短视频。 关了手机,睡不着了。 明天还要上班。 这种焦虑感,我太熟悉了。 作为一个写了12年代码的老程序员,这两年被问到最多的问题就是:"有什么真正能用的AI变现方法?" 今天不画饼,说点真话。 先说结论 AI…...

miniblink49浏览器内核:企业级打印与PDF生成技术架构深度解析
miniblink49浏览器内核:企业级打印与PDF生成技术架构深度解析 【免费下载链接】miniblink49 a lighter, faster browser kernel of blink to integrate HTML UI in your app. 一个小巧、轻量的浏览器内核,用来取代wke和libcef 项目地址: https://gitco…...

GetQzonehistory:如何永久保存你的QQ空间记忆
GetQzonehistory:如何永久保存你的QQ空间记忆 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 你是否曾在深夜翻看QQ空间,突然发现那些记录着青春点滴的说说正在逐…...

Java中的Comparator 和JS中的回调函数好相似
Comparator 在 Java 中的地位,非常像 JavaScript 中 Array.prototype.sort() 那个接收的 回调函数 (Comparison Function)。1. Comparator 是什么?在 Java 中,Comparator 是一个接口,它的核心作用是定义“比较逻辑”。在 Java 8 之…...

如何在VSCode中快速配置专业级R语言开发环境:终极实战指南
如何在VSCode中快速配置专业级R语言开发环境:终极实战指南 【免费下载链接】vscode-R R Extension for Visual Studio Code 项目地址: https://gitcode.com/gh_mirrors/vs/vscode-R 你是否正在寻找一个现代化的R语言开发环境,能够提供智能代码补全…...

TestDisk与PhotoRec:数据恢复终极指南,三步找回丢失的重要文件
TestDisk与PhotoRec:数据恢复终极指南,三步找回丢失的重要文件 【免费下载链接】testdisk TestDisk & PhotoRec 项目地址: https://gitcode.com/gh_mirrors/te/testdisk 当硬盘分区神秘消失、重要文件被误删除、存储设备突然无法访问时&#…...

AWVS深度调优指南:从安装卡死到WAF绕过实战
1. 这不是“点几下就完事”的玩具,而是渗透测试中真正扛压的扫描引擎很多人第一次听说AWVS(Acunetix Web Vulnerability Scanner),是在某篇标题写着“三分钟上手”“一键扫出100个漏洞”的公众号推文里。结果装完发现:…...

Node.js 服务如何无缝接入 Taotoken 并管理多个模型的 API 调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Node.js 服务如何无缝接入 Taotoken 并管理多个模型的 API 调用 在构建现代 Node.js 后端服务时,集成多种大语言模型能…...

终极指南:Windows上无需模拟器安装APK文件的完整教程
终极指南:Windows上无需模拟器安装APK文件的完整教程 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为在Windows电脑上安装安卓应用而烦恼吗ÿ…...

高效小红书数据采集完全指南:从入门到实战的完整解决方案
高效小红书数据采集完全指南:从入门到实战的完整解决方案 【免费下载链接】xhs 基于小红书 Web 端进行的请求封装。https://reajason.github.io/xhs/ 项目地址: https://gitcode.com/gh_mirrors/xh/xhs 小红书数据采集已成为市场分析、品牌运营和内容创作的关…...