【STM32】HAL库的STOP低功耗模式UART串口唤醒,解决首字节出错的问题(全网第一解决方案)
【STM32】HAL库的STOP低功耗模式UART串口唤醒,解决首字节出错的问题(全网第一解决方案)
前文:
【STM32】HAL库的STOP低功耗模式UART串口唤醒,第一个接收字节出错的问题(疑难杂症)
目前已解决 并更新了我的gitee库:
基于HAL库建立自己的低功耗模式配置库(STM32L4系列低功耗所有配置汇总)
文章目录
- 最初的串口唤醒配置
- 首字节出错的问题
- 解决后的流程及代码
- 为什么说是“全网第一”
- 附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
- SysTick系统定时器精准延时
- 延时函数
- 阻塞延时
- 非阻塞延时
- 位带操作
- 位带代码
- 位带宏定义
- 总线函数
- 一、位带操作理论及实践
- 二、如何判断MCU的外设是否支持位带
最初的串口唤醒配置
在最初的串口唤醒配置中 我是用的如下配置(现已更新):
【STM32】HAL库低功耗STOP停止模式的串口唤醒(解决进入以后立马唤醒、串口唤醒和回调无法一起使用、接收数据不全、首字节错误的问题)
进入和退出函数为:
/*!* @brief 配置串口在停止模式下的唤醒 ** @param [in] huart: UART_HandleTypeDef类型的器件* [in] EnableNotDisable: 使能或者关闭** @return None*/
void Ctrl_UART_StopMode_WakeUp(UART_HandleTypeDef *huart,bool EnableNotDisable)
{ if(EnableNotDisable){__HAL_RCC_WAKEUPSTOP_CLK_CONFIG(RCC_STOP_WAKEUPCLOCK_HSI); //保留唤醒用的HSI线 串口初始化时钟也必须要配置为HSIUART_WakeUpTypeDef UART_WakeUpStruct={0};UART_WakeUpStruct.WakeUpEvent=UART_WAKEUP_ON_READDATA_NONEMPTY; //接收数据不为空时唤醒HAL_UARTEx_StopModeWakeUpSourceConfig(huart,UART_WakeUpStruct);__HAL_UART_ENABLE_IT(huart,UART_IT_WUF); //开启唤醒中断HAL_UARTEx_EnableStopMode(huart); //开启模式}else{__HAL_UART_DISABLE_IT(huart,UART_IT_WUF); //关闭唤醒中断HAL_UARTEx_DisableStopMode(huart); //关闭模式}
}在唤醒后 我将时钟初始化等 放到了唤醒回调中 导致长数据中间丢数据
于是进行改进 就是把初始化等退出以后的函数放到主线程 低功耗函数之后 就能完美解决这个问题
在进入低功耗模式之前的流程为:
- 保留HSI线(系统RCC中的宏函数,其他用到HSI时钟唤醒的外设也建议进行此步骤,这里串口也必须要用这条时钟线)
- 配置串口唤醒方式
- 开启串口唤醒中断(可以不开)
- 开启串口唤醒功能
其中 开启串口唤醒功能就是将此寄存器置1

当然 这里的串口唤醒是抄的网上的代码和流程 教程很多 我就不叙述了

不过最后我发现在高速UART波特率的情况下 首唤醒字节仍然会丢失
且无论怎么改 都会出现此问题
具体调试和BUG复现过程:
【STM32】HAL库的STOP低功耗模式UART串口唤醒,第一个接收字节出错的问题(疑难杂症)
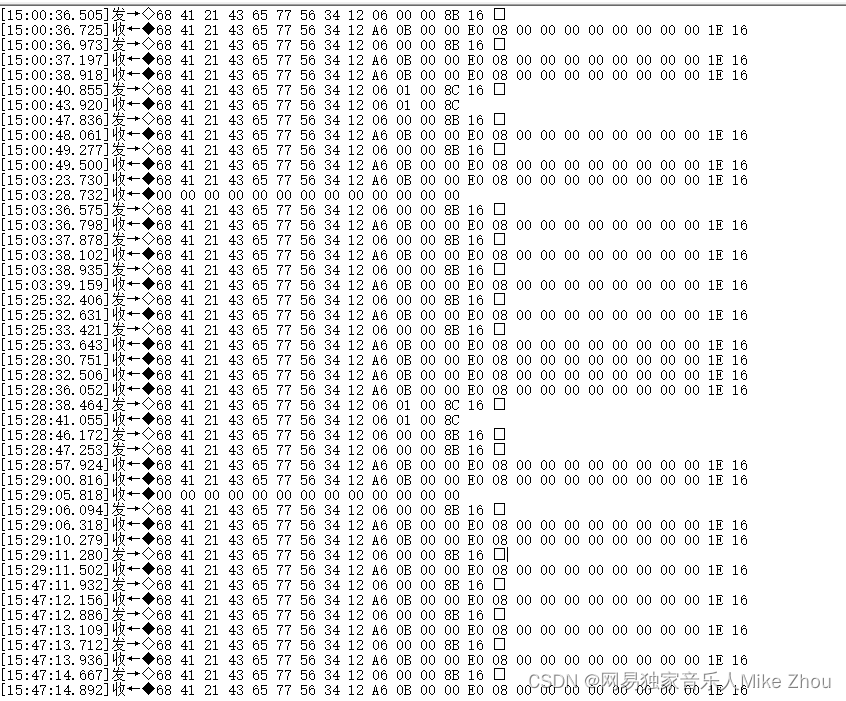
首字节出错的问题
经过前文的调试 首字节在出错时 是将采样后移了一位 发送AA 接收到55
也就是发送1010 1010 接收到0101 0101
所以我猜想应该是时钟的问题
进入低功耗需要时间 同样 唤醒也需要时间 所以可能就是这么点时间导致CPU延迟采样 所以串口接收不准
同样 在进入低功耗后 可以看到电流也是缓慢下降的 而采用jlink烧录后 实际上功耗下不来(大个1ma左右) 推测应该是jlink的信号复位保持了某些寄存器不清零(毕竟jlink和复位也算中断的一种)
这个问题困扰我好几天 我心中知道一定是时钟的问题 但一直没办法解决
直到我开发STM32L4R系列时 发现一个寄存器如L496不同:
也就是CR3的第23位
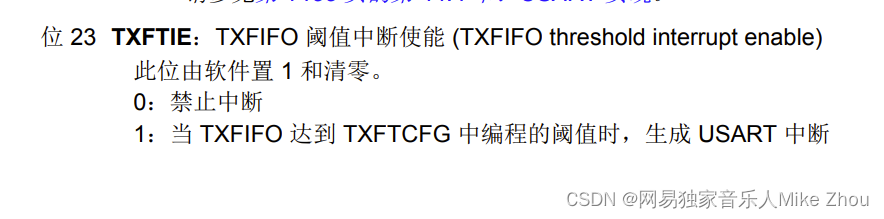
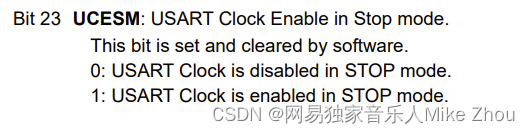
起初 我以为是芯片手册版本的问题 直到我查看SDK发现真的如此
有个操作函数HAL_UARTEx_EnableClockStopMode长这样:
#if defined(USART_CR3_UCESM)
/*** @brief Keep UART Clock enabled when in Stop Mode.* @note When the USART clock source is configured to be LSE or HSI, it is possible to keep enabled* this clock during STOP mode by setting the UCESM bit in USART_CR3 control register.* @note When LPUART is used to wakeup from stop with LSE is selected as LPUART clock source,* and desired baud rate is 9600 baud, the bit UCESM bit in LPUART_CR3 control register must be set.* @param huart UART handle.* @retval HAL status*/
HAL_StatusTypeDef HAL_UARTEx_EnableClockStopMode(UART_HandleTypeDef *huart)
{/* Process Locked */__HAL_LOCK(huart);/* Set UCESM bit */SET_BIT(huart->Instance->CR3, USART_CR3_UCESM);/* Process Unlocked */__HAL_UNLOCK(huart);return HAL_OK;
}而部分芯片是没有USART_CR3_UCESM这一位的
#define USART_CR3_UCESM_Pos (23U)
#define USART_CR3_UCESM_Msk (0x1UL << USART_CR3_UCESM_Pos) /*!< 0x02000000 */
#define USART_CR3_UCESM USART_CR3_UCESM_Msk /*!< USART Clock enable in Stop mode */
这个函数位于uart_ex中
注释里面说明了 要保证在低功耗时 保持时钟 所以要用到的这个函数
另外 采用LPUART时 如果波特率在9600之上 这一位需要置1
而函数HAL_UARTEx_EnableStopMode只对USART_CR1_UESM进行了操作
此寄存器是通用的 并且SDK中的函数也是通用的
/*** @brief Enable UART Stop Mode.* @note The UART is able to wake up the MCU from Stop 1 mode as long as UART clock is HSI or LSE.* @param huart UART handle.* @retval HAL status*/
HAL_StatusTypeDef HAL_UARTEx_EnableStopMode(UART_HandleTypeDef *huart)
{/* Process Locked */__HAL_LOCK(huart);/* Set UESM bit */SET_BIT(huart->Instance->CR1, USART_CR1_UESM);/* Process Unlocked */__HAL_UNLOCK(huart);return HAL_OK;
}
所以 我就把函数HAL_UARTEx_EnableClockStopMode添加到了进入低功耗之前
然后就解决了BUG 停止模式下的BUG再也没出错
解决后的流程及代码
最后的串口唤醒配置流程就改为:
- 保留HSI线(系统RCC中的宏函数,其他用到HSI时钟唤醒的外设也建议进行此步骤,这里串口也必须要用这条时钟线)
- 配置串口唤醒方式
- 开启串口唤醒中断(可以不开)
- 开启串口STOP模式时钟 开启串口唤醒功能
代码:
/*!* @brief 配置串口在停止模式下的唤醒 ** @param [in] huart: UART_HandleTypeDef类型的器件* [in] EnableNotDisable: 使能或者关闭** @return None*/
void Ctrl_UART_StopMode_WakeUp(UART_HandleTypeDef *huart,bool EnableNotDisable)
{ if(EnableNotDisable){__HAL_RCC_WAKEUPSTOP_CLK_CONFIG(RCC_STOP_WAKEUPCLOCK_HSI); //保留唤醒用的HSI线 串口初始化时钟也必须要配置为HSIUART_WakeUpTypeDef UART_WakeUpStruct={0};UART_WakeUpStruct.WakeUpEvent=UART_WAKEUP_ON_READDATA_NONEMPTY; //接收数据不为空时唤醒HAL_UARTEx_StopModeWakeUpSourceConfig(huart,UART_WakeUpStruct);__HAL_UART_ENABLE_IT(huart,UART_IT_WUF); //开启唤醒中断HAL_UARTEx_EnableClockStopMode(huart);HAL_UARTEx_EnableStopMode(huart); //开启模式}else{__HAL_UART_DISABLE_IT(huart,UART_IT_WUF); //关闭唤醒中断HAL_UARTEx_DisableClockStopMode(huart);HAL_UARTEx_DisableStopMode(huart); //关闭模式}
}其中 第一步的保留HSI时钟线 也就是RCC中的宏函数 这一步我在测试后发现 如果使用了HAL_UARTEx_EnableClockStopMode函数 则不需要进行第一步 但是串口所使用的时钟还是要配置为HSI线
为什么说是“全网第一”
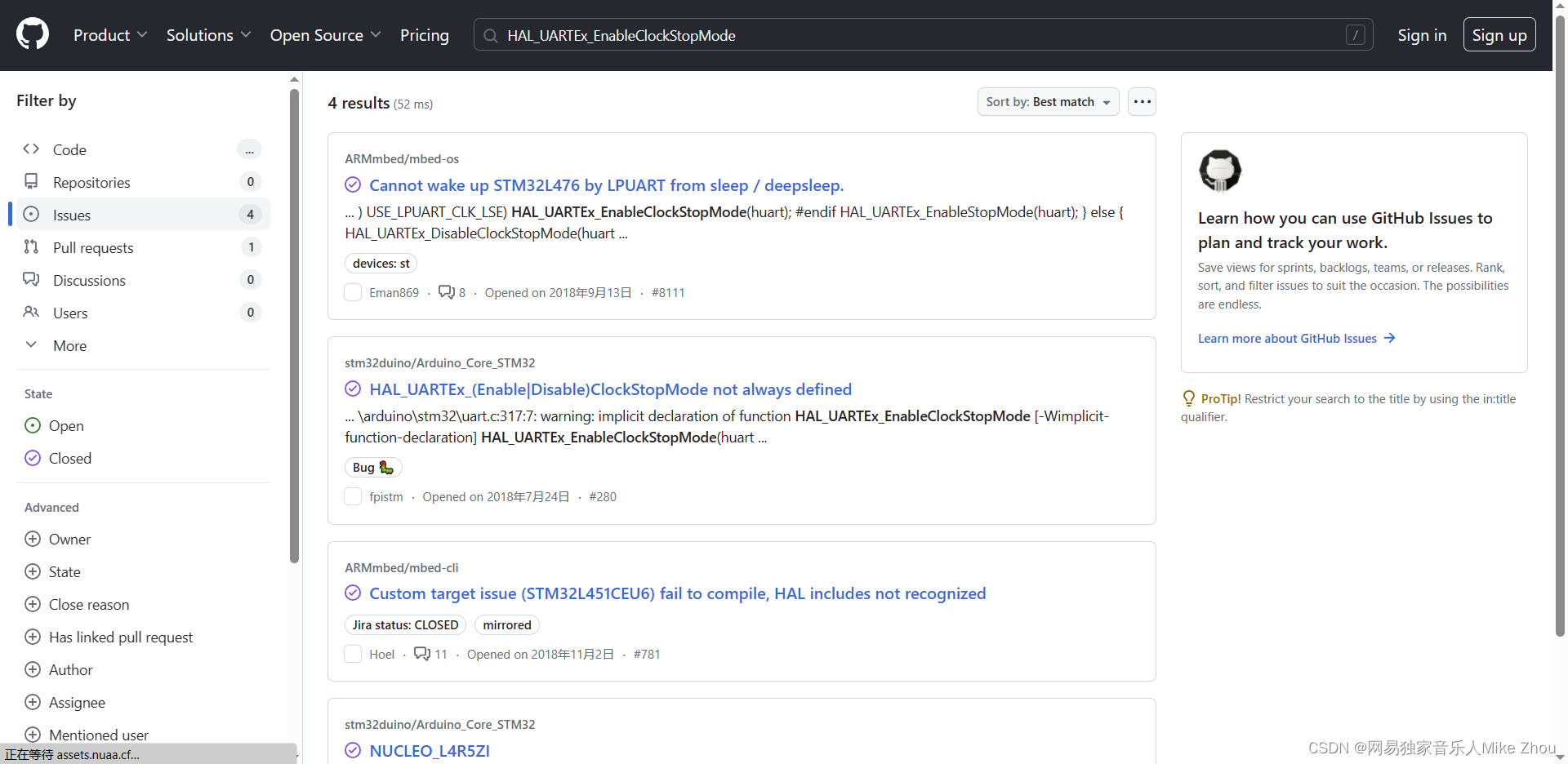
最后 我在网上搜素HAL_UARTEx_EnableClockStopMode函数
发现国内无论是CSDN还是百度都搜不到


只有GitHub上寥寥无几的几个搜素结果 并且都是与LPUART有关的(虽然这个与UART配置流程和函数基本一样)
附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
SysTick系统定时器精准延时
延时函数
SysTick->LOAD中的值为计数值
计算方法为工作频率值/分频值
比如工作频率/1000 则周期为1ms
以ADuCM4050为例:
#include "ADuCM4050.h"void delay_ms(unsigned int ms)
{SysTick->LOAD = 26000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 26000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}其中的52000000表示芯片的系统定时器频率 32系列一般为外部定时器频率的两倍
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
非阻塞延时
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
位带操作
位带代码
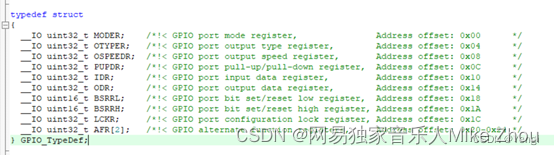
M3、M4架构的单片机 其输出口地址为端口地址+20 输入为+16
M0架构的单片机 其输出口地址为端口地址+12 输入为+8
以ADuCM4050为列:
位带宏定义
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) //输出
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) //输入 #define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) //输出
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) //输入 #define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) //输出
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) //输入 #define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) //输出
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) //输入 #define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);#endif总线函数
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{switch(port){case 0:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 1:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 2:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 3:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;default:port=0;break;}
}void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num最大为0xffff
{int i;for(i=0;i<16;i++){GPIO_OUT(port,i,(num>>i)&0x0001);}
}void P0_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P0_O(i)=(num>>i)&0x0001;}
}
unsigned int P0_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P0_I(i)<<i)&0xFFFF;}return num;
}void P1_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P1_O(i)=(num>>i)&0x0001;}
}
unsigned int P1_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P1_I(i)<<i)&0xFFFF;}return num;
}void P2_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P2_O(i)=(num>>i)&0x0001;}
}
unsigned int P2_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P2_I(i)<<i)&0xFFFF;}return num;
}void P3_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P3_O(i)=(num>>i)&0x0001;}
}
unsigned int P3_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P3_I(i)<<i)&0xFFFF;}return num;
}一、位带操作理论及实践
位带操作的概念其实30年前就有了,那还是 CM3 将此能力进化,这里的位带操作是 8051 位寻址区的威力大幅加强版
位带区: 支持位带操作的地址区
位带别名: 对别名地址的访问最终作 用到位带区的访问上(注意:这中途有一个 地址映射过程)
位带操作对于硬件 I/O 密集型的底层程序最有用处
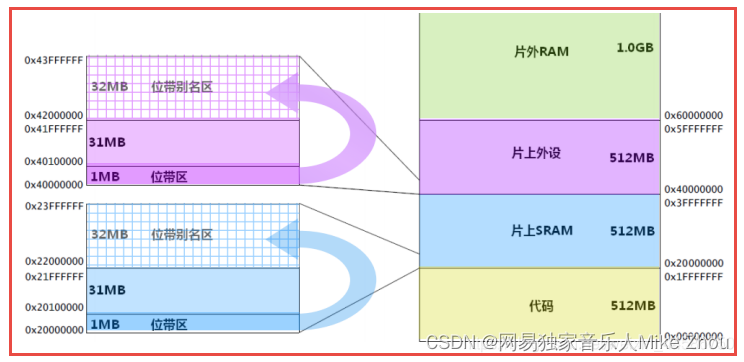
支持了位带操作后,可以使用普通的加载/存储指令来对单一的比特进行读写。在CM4中,有两个区中实现了位带。其中一个是SRAM区的最低1MB范围,第二个则是片内外设区的最低1MB范围。这两个区中的地址除了可以像普通的RAM一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个32位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。
位操作就是可以单独的对一个比特位读和写,类似与51中sbit定义的变量,stm32中通过访问位带别名区来实现位操作的功能
STM32中有两个地方实现了位带,一个是SRAM,一个是片上外设。
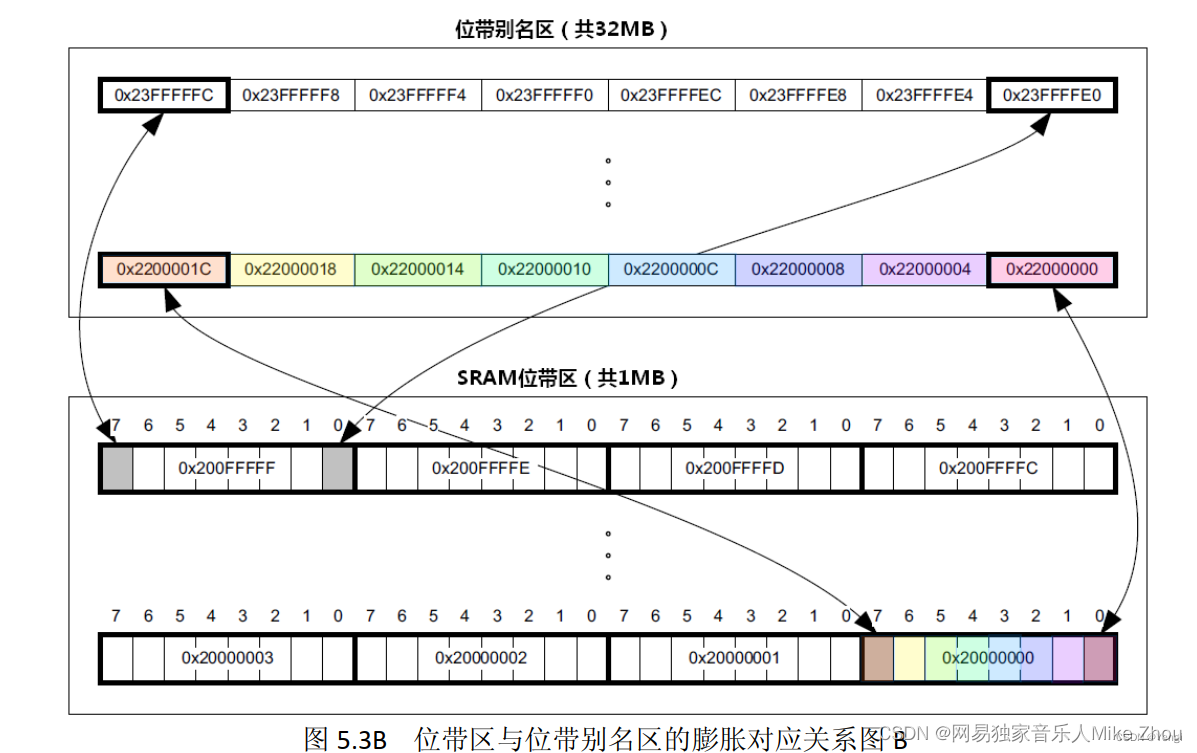
(1)位带本质上是一块地址区(例如每一位地址位对应一个寄存器)映射到另一片地址区(实现每一位地址位对应一个寄存器中的一位),该区域就叫做位带别名区,将每一位膨胀成一个32位的字。
(2)位带区的4个字节对应实际寄存器或内存区的一个位,虽然变大到4个字节,但实际上只有最低位有效(代表0或1)
只有位带可以直接用=赋值的方式来操作寄存器 位带是把寄存器上的每一位 膨胀到32位 映射到位带区 比如0x4002 0000地址的第0个bit 映射到位带区的0地址 那么其对应的位带映射地址为0x00 - 0x04 一共32位 但只有LSB有效 采用位带的方式用=赋值时 就是把位带区对应的LSB赋值 然后MCU再转到寄存器对应的位里面 寄存器操作时 如果不改变其他位上面的值 那就只能通过&=或者|=的方式进行
要设置0x2000 0000这个字节的第二个位bit2为1,使用位带操作的步骤有:
1、将1写入位 带别名区对应的映射地址(即0x22000008,因为1bit对应4个byte);
2、将0x2000 0000的值 读取到内部的缓冲区(这一步骤是内核完成的,属于原子操作,不需要用户操作);
3、将bit2置1,再把值写 回到0x2000 0000(属于原子操作,不需要用户操作)。
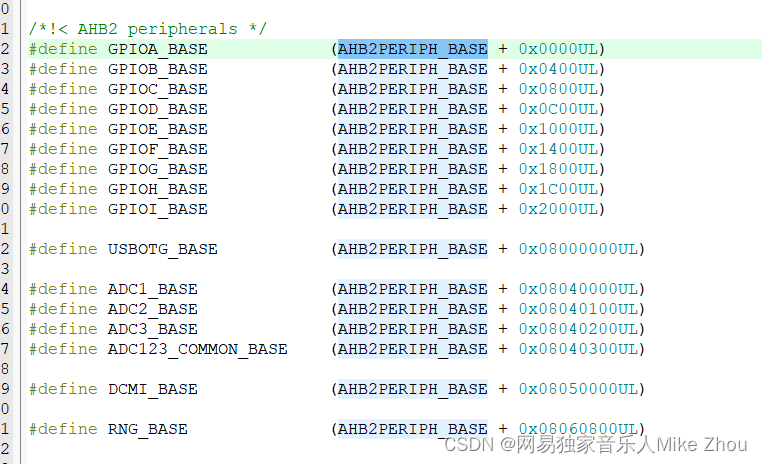
关于GPIO引脚对应的访问地址,可以参考以下公式
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
如:端口F访问的起始地址GPIOF_BASE
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)
但好在官方库里面都帮我们定义好了 只需要在BASE地址加上便宜即可
例如:
GPIOF的ODR寄存器的地址 = GPIOF_BASE + 0x14
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
设置PF9引脚的话:
uint32_t *PF9_BitBand =
*(uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR– 0x40000000) *32 + 9*4)封装一下:
#define PFout(x) *(volatile uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR – 0x40000000) *32 + x*4)现在 可以把通用部分封装成一个小定义:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
那么 设置PF引脚的函数可以定义:
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410 #define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
若使PF9输入输出则:
PF_O(9)=1; //输出高电平
uint8_t dat = PF_I(9); //获取PF9引脚的值
总线输入输出:
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}
STM32的可用下面的函数:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "stm32l496xx.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014 #define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010 #define PA_O(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PA_I(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PB_O(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PB_I(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PC_O(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PC_I(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PD_O(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PD_I(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PE_O(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PE_I(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入#define PG_O(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PG_I(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入#define PH_O(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PH_I(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入#define PI_O(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PI_I(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入void PA_BUS_O(unsigned int num);
unsigned int PA_BUS_I(void);void PB_BUS_O(unsigned int num);
unsigned int PB_BUS_I(void);void PC_BUS_O(unsigned int num);
unsigned int PC_BUS_I(void);void PD_BUS_O(unsigned int num);
unsigned int PD_BUS_I(void);void PE_BUS_O(unsigned int num);
unsigned int PE_BUS_I(void);void PF_BUS_O(unsigned int num);
unsigned int PF_BUS_I(void);void PG_BUS_O(unsigned int num);
unsigned int PG_BUS_I(void);void PH_BUS_O(unsigned int num);
unsigned int PH_BUS_I(void);void PI_BUS_O(unsigned int num);
unsigned int PI_BUS_I(void);#endif#include "GPIO.h"void PA_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PA_O(i)=(num>>i)&0x0001;}
}
unsigned int PA_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PA_I(i)<<i)&0xFFFF;}return num;
}void PB_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PB_O(i)=(num>>i)&0x0001;}
}
unsigned int PB_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PB_I(i)<<i)&0xFFFF;}return num;
}void PC_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PC_O(i)=(num>>i)&0x0001;}
}
unsigned int PC_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PC_I(i)<<i)&0xFFFF;}return num;
}void PD_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PD_O(i)=(num>>i)&0x0001;}
}
unsigned int PD_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PD_I(i)<<i)&0xFFFF;}return num;
}void PE_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PE_O(i)=(num>>i)&0x0001;}
}
unsigned int PE_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PE_I(i)<<i)&0xFFFF;}return num;
}void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}void PG_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PG_O(i)=(num>>i)&0x0001;}
}
unsigned int PG_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PG_I(i)<<i)&0xFFFF;}return num;
}void PH_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PH_O(i)=(num>>i)&0x0001;}
}
unsigned int PH_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PH_I(i)<<i)&0xFFFF;}return num;
}void PI_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PI_O(i)=(num>>i)&0x0001;}
}
unsigned int PI_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PI_I(i)<<i)&0xFFFF;}return num;
}二、如何判断MCU的外设是否支持位带
根据《ARM Cortex-M3与Cortex-M4权威指南(第3版)》中第6章第7节描述
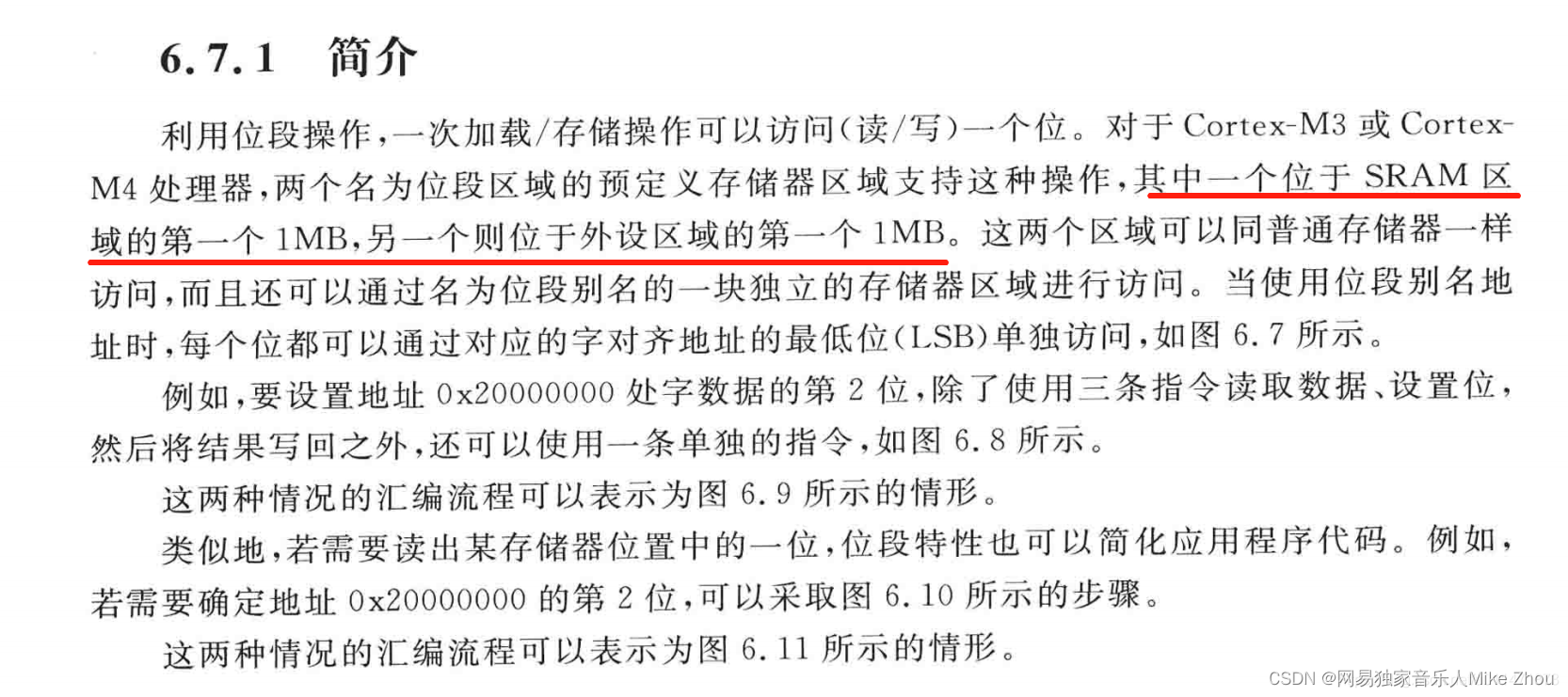
也就是说 要实现对GPIO的位带操作 必须保证GPIO位于外设区域的第一个1MB中
第一个1MB应该是0x4010 0000之前 位带不是直接操作地址 而是操作地址映射 地址映射被操作以后 MCU自动会修改对应寄存器的值
位带区只有1MB 所以只能改0x4000 0000 - 0x400F FFFF的寄存器
像F4系列 GPIO的首地址为0x4002 0000 就可以用位带来更改
STM32L476的GPIO就不行:
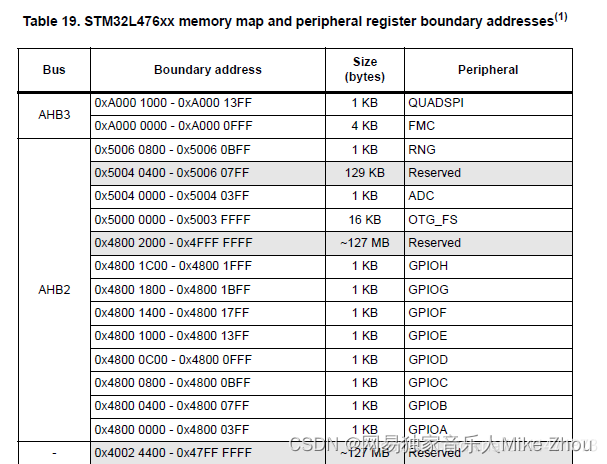
AHB2的都不能用位带
ABP 还有AHB1都可以用
但是L476的寄存器里面 GPIO和ADC都是AHB2
相关文章:
【STM32】HAL库的STOP低功耗模式UART串口唤醒,解决首字节出错的问题(全网第一解决方案)
【STM32】HAL库的STOP低功耗模式UART串口唤醒,解决首字节出错的问题(全网第一解决方案) 前文: 【STM32】HAL库的STOP低功耗模式UART串口唤醒,第一个接收字节出错的问题(疑难杂症) 目前已解决 …...

Python 语法糖
一、基本概念 语法糖,可以理解为:“甜蜜” 的便捷语法。 它是编程语言为程序提供的更简洁、更易读的语法实现的语法结构,它并不影响语言的功能,仅仅是一种更便捷的书写方式。 这就像你制作蛋糕时,使用现代烤箱而不是…...
一个小程序跳转到另一个小程序中如何实现
小程序 保证两个小程序是一样的主体才可以跳转。怎么知道是不是同样的主体呢? 小程序的后台管理-设置-基本设置-基本信息。查看主体信息。 跳转 <button clicktoOtherMini()>跳转到另一个小程序</button> function toOtherMini(){wx.navigateToMini…...
STM32+HAL库驱动ADXL345传感器(SPI协议)
STM32HAL库驱动ADXL345传感器(SPI协议) ADXL345传感器简介实物STM32CubeMX配置SPI配置片选引脚配置串口配置 特别注意(重点部分)核心代码效果展示 ADXL345传感器简介 ADXL345 是 ADI 公司推出的基于 iMEMS 技术的 3 轴、数字输出加…...
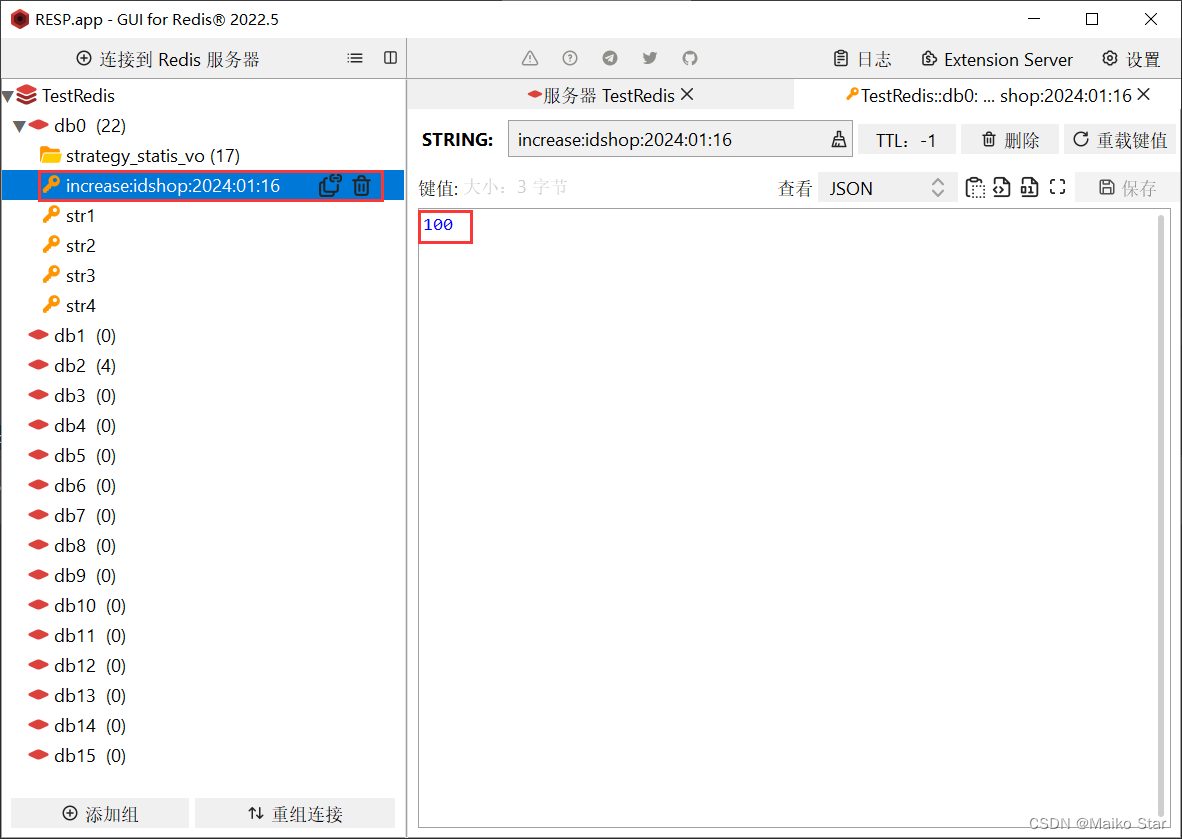
Redis实现全局唯一Id
一、全局唯一ID 每个店铺都可以发布优惠券: 当用户抢购时,就会生成订单并保存到tb_voucher_order这张表中,而订单表如果使用数据库自增ID就存在一些问题: id的规律性太明显 受单表数据量的限制 场景分析:如果我们的…...
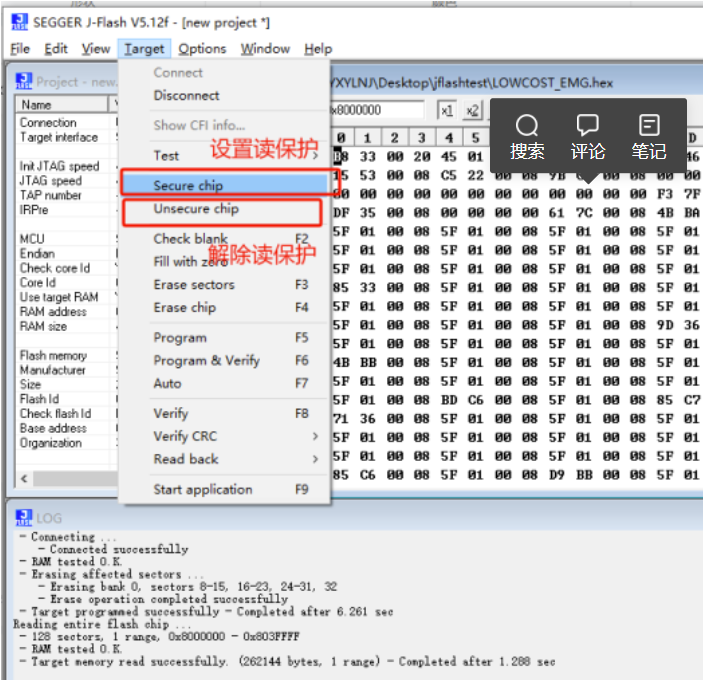
【J-Flash基本使用总结】
【J-Flash基本使用总结】 VX:hao541022348 ■ 烧录文件■ 创建新的工程■ 烧录模式-SWD模式■ J-Flash下载程序到单片机 ■ J-Flash拼接多个hex或bin文件■ J-Flash读单片机的option byte■ J-Flash读单片机Flash数据■ 将读出来的文件用jflash烧录到其他的芯片■ 设…...

宝塔发布网站问题汇总和记录
1、添加网站站点后打不开 解决办法,关闭防跨站攻击2 2、laravel项目部署到linux的时候出现The stream or file "/home/www/storage/logs/laravel.log" could not be opened in append mode 给目录加权限 chmod -R 777 storage 3、Class "Redis"…...

决战排序之巅(二)
决战排序之巅(二) 排序测试函数 void verify(int* arr, int n) 归并排序递归方案代码可行性测试 非递归方案代码可行性测试 特点分析 计数排序代码实现代码可行性测试 特点分析 归并排序 VS 计数排序(Release版本)说明1w rand( ) …...

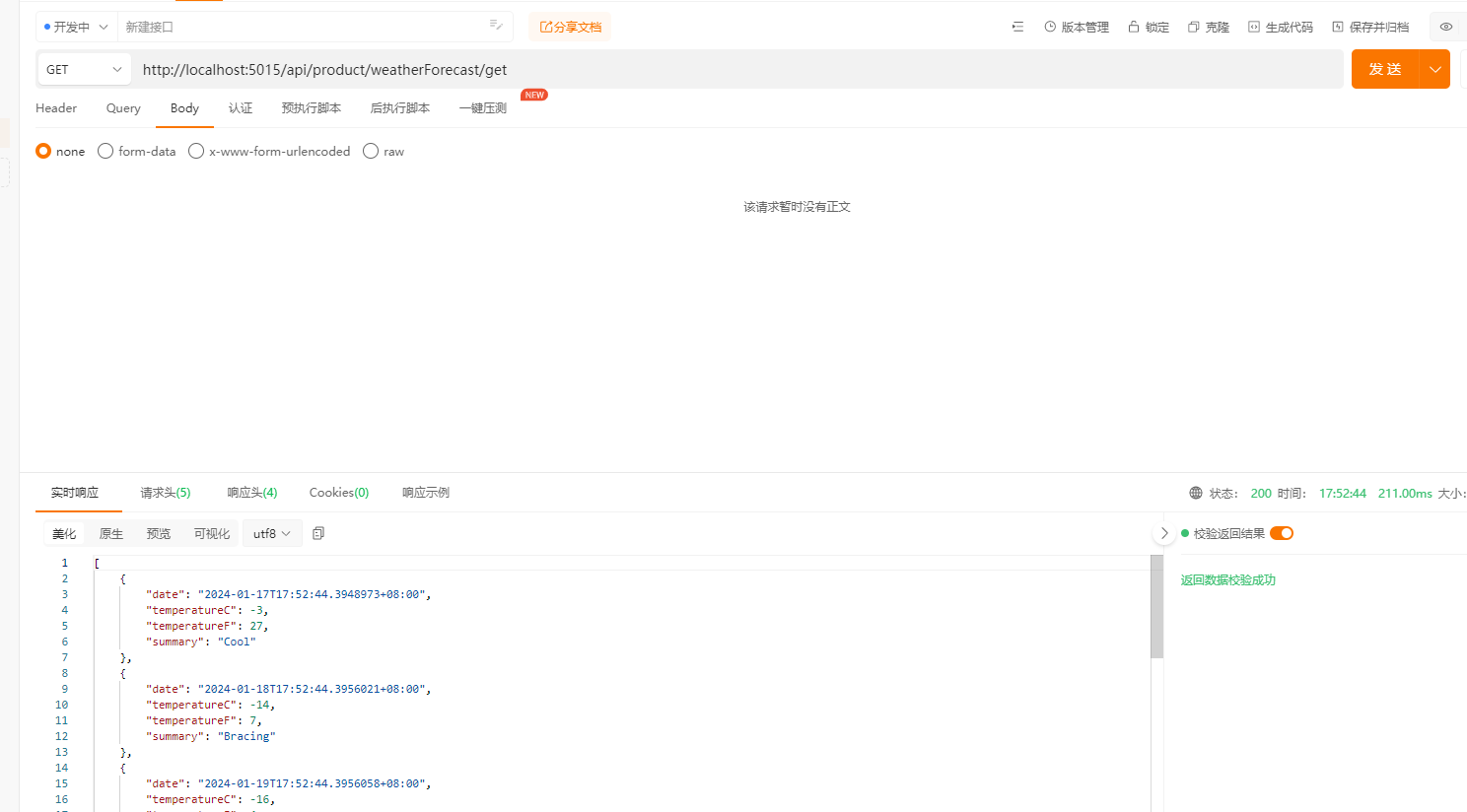
自动化网络监控:每分钟自动检测网站可用性
🧙♂️ 诸位好,吾乃诸葛妙计,编程界之翘楚,代码之大师。算法如流水,逻辑如棋局。 📜 吾之笔记,内含诸般技术之秘诀。吾欲以此笔记,传授编程之道,助汝解技术难题。 &…...
Asp .Net Core 系列:集成 Ocelot+Consul实现网关、服务注册、服务发现
什么是Ocelot? Ocelot是一个开源的ASP.NET Core微服务网关,它提供了API网关所需的所有功能,如路由、认证、限流、监控等。 Ocelot是一个简单、灵活且功能强大的API网关,它可以与现有的服务集成,并帮助您保护、监控和扩展您的微…...

MSSQL行转列、列转行
行转列 SELECT * FROM student PIVOT ( SUM(score) FOR subject IN (语文, 数学, 英语) ) AS PivotedData; 列转行 SELECT * FROM student1 UNPIVOT ( score FOR subject IN ("语文","数学","英语") )AS PivotedData;...

【MySQL】创建和管理表
文章目录 前置 标识符命名规则一、MySQL数据类型二、创建和管理数据库2.1 创建数据库2.2 使用数据库2.3 修改数据库2.4 删除数据库 三、创建表3.1 创建方式一3.2 创建方式二3.3 查看数据表结构 四、修改表4.1 增加一个列4.2 修改一个列4.3 重命名一个列4.4 删除一个列 五、重命…...
缓存和数据库一致性
前言: 项目的难点是如何保证缓存和数据库的一致性。无论我们是先更新数据库,后更新缓存还是先更新数据库,然后删除缓存,在并发场景之下,仍然会存在数据不一致的情况(也存在删除失败的情况,删除…...
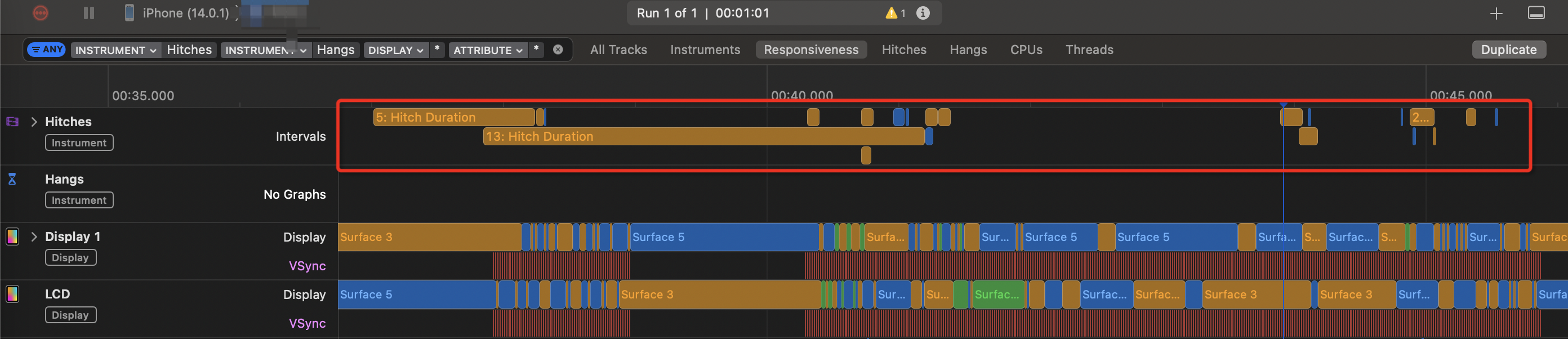
iOS UI掉帧和卡顿优化解决方案记录
UI卡顿原理 在 VSync 信号到来后,系统图形服务会通过 CADisplayLink 等机制通知 App,App 主线程开始在 CPU 中计算显示内容,比如视图的创建、布局计算、图片解码、文本绘制等。随后 CPU 会将计算好的内容提交到 GPU 去,由 GPU 进行…...
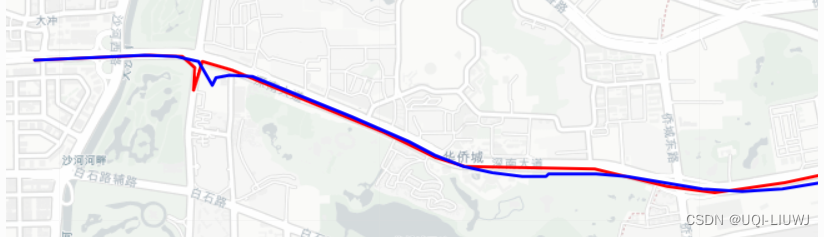
transbigdata 笔记: 轨迹密集化/稀疏化 轨迹平滑
1 密集化 transbigdata.traj_densify(data, col[Vehicleid, Time, Lng, Lat], timegap15) 轨迹致密化,保证至多每隔timegap秒都有一个轨迹点 这边插补使用的是pandas的interpolate,method设置的是index 1.1 举例 transbigdata 笔记: 官方…...

反向代理的本质是什么?
反向代理是一种网络架构模式,通常用于提供静态内容、处理安全、负载均衡和缓存等任务。在这种架构中,客户端发送的请求首先到达反向代理服务器,然后由反向代理服务器将请求转发给后端的实际服务器。反向代理服务器可以处理和修改请求和响应&a…...

Kali Linux保姆级教程|零基础从入门到精通,看完这一篇就够了!(附工具包)
作为一名从事网络安全的技术人员,不懂Kali Linux的话,连脚本小子都算不上。 Kali Linux预装了数百种享誉盛名的渗透工具,使你可以更轻松地测试、破解以及进行与数字取证相关的任何其他工作。 今天给大家分享一套Kali Linux资料合集…...
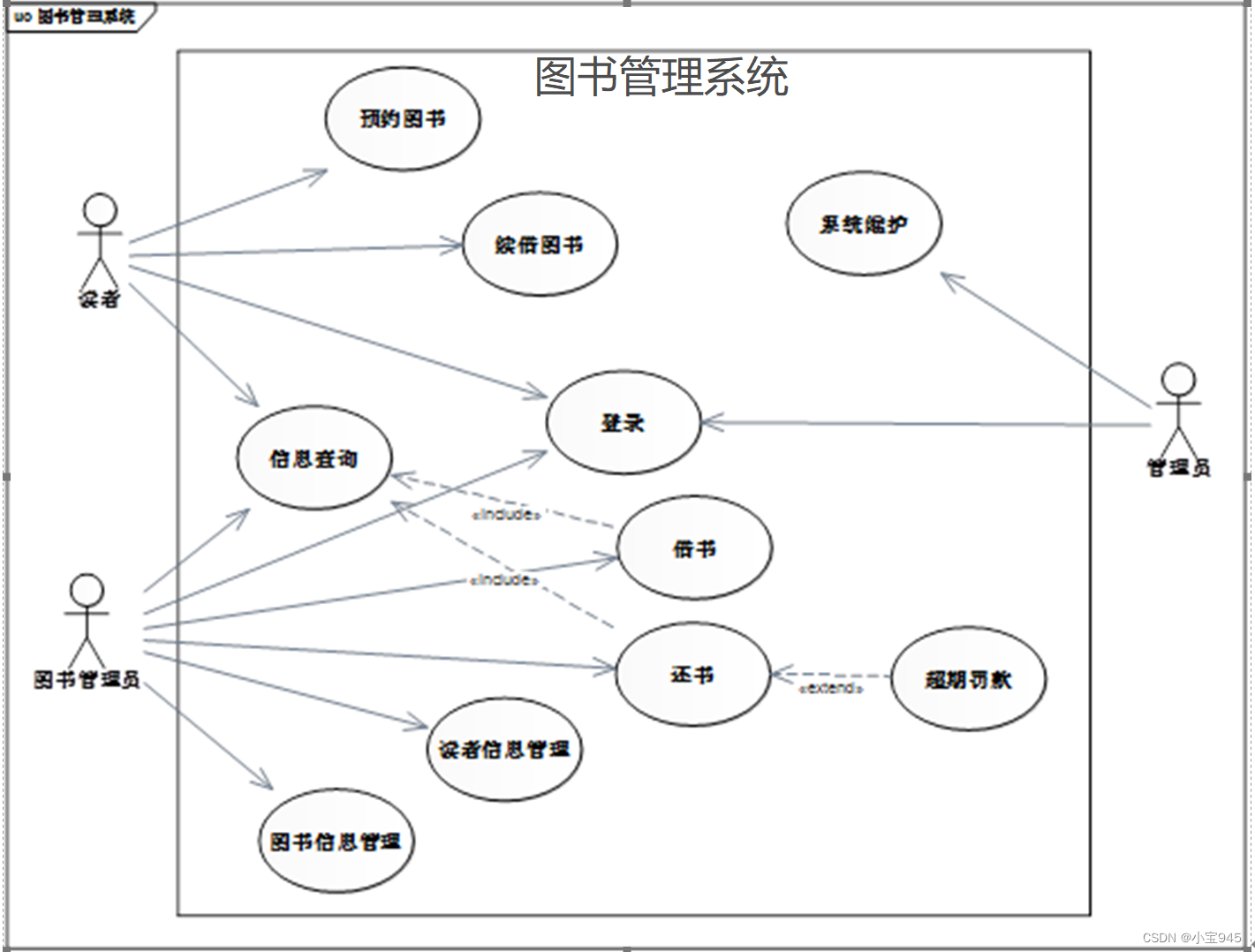
UML-用例图
提示:用例图是软件建模的开始,软件建模中的其他图形都将以用例图为依据。用例图列举了系统所需要实现的所有功能,除了用于软件开发的需求分析阶段,也可用于软件的系统测试阶段。 UML-用例图 一、用例图的基础知识1.用例图的构成元…...
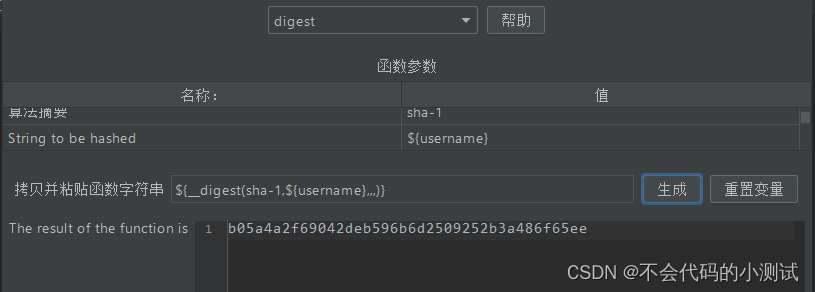
jmeter--8.加密传输
目录 1. Base64加密 2. MD5加密 3. SHA加密(sha1\sha\sha224\sha256\sha384\sha512) 4. RSA加密-公钥加密,私钥解密 1. Base64加密 1.1 在需要加密传输的接口下新增BeanShell 预处理程序,${username}可替换成value值ÿ…...

微信小程序canvas画布转图片转pdf文件
关键步骤介绍 步骤一:将canvas页面保存为图片 for(var a=0;a<this.data.page_canvas.length;++a){ var t_page_img = await this.canvas_to_image(this.data.page_canvas[a]) t_img.push(t_page_img) } this.data.page_canvas是保存的canvas界面,this.c…...

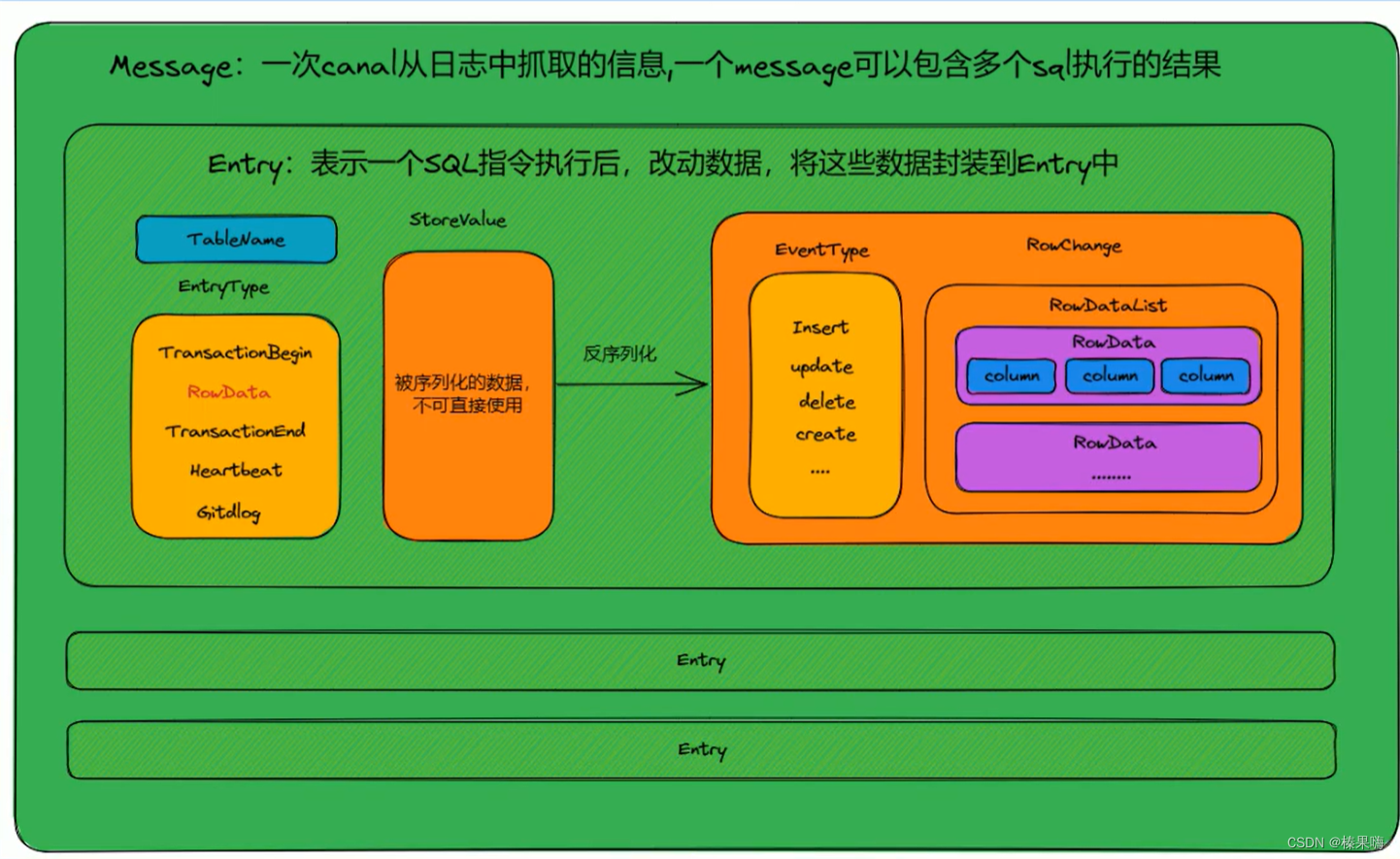
深入nRF5340双核通信:拆解LE Audio同步背后的IPC与DPPI机制
深入拆解nRF5340双核通信:LE Audio同步背后的IPC与DPPI实战解析 当你在调试nRF5340的LE Audio应用时,是否遇到过这样的场景:网络核(NET Core)已经收到了完整的音频数据包,但应用核(APP Core)的音频处理却出现了微秒级的延迟&#…...

HarmonyOS万能卡片开发实战:游戏状态桌面实时展示与交互实现
1. 项目概述:当游戏遇见万能卡片最近在HarmonyOS 3.1上折腾一个挺有意思的东西:把游戏的关键信息,比如角色状态、资源数量、离线收益,甚至是一键快捷操作,直接做成一个“万能卡片”放在桌面上。这可不是简单的应用图标…...

SAR ADC工作原理、设计挑战与工程实践全解析
1. 项目概述:从“快枪手”到“精算师”的转换艺术在模拟信号与数字世界之间架起桥梁,是ADC(模数转换器)的核心使命。而在众多ADC架构中,SAR ADC(逐次逼近寄存器型模数转换器)因其独特的“二分搜…...

终极指南:在Windows系统上完整解锁MacBook Pro Touch Bar功能
终极指南:在Windows系统上完整解锁MacBook Pro Touch Bar功能 【免费下载链接】DFRDisplayKm Windows infrastructure support for Apple DFR (Touch Bar) 项目地址: https://gitcode.com/gh_mirrors/df/DFRDisplayKm 还在为MacBook Pro在Windows系统中Touch…...
)
从CI/CD到生产回滚:Gemini嵌入Java构建链的4层审查网(含Gradle/Maven插件零侵入部署脚本)
更多请点击: https://codechina.net 第一章:Gemini Java代码审查 Google Gemini 模型(特别是 Gemini 1.5 Pro 及后续版本)已展现出对 Java 代码语义理解、缺陷识别与重构建议的强推理能力。在实际工程中,可将其集成至…...

1756-PA75R直流冗余电源模块
1756-PA75R直流冗余电源模块产品特点1756-PA75R是为ControlLogix系统设计的高可靠直流冗余电源模块,支持热更换与均流控制。其核心特点如下:支持双机并联,构建真正的N1冗余系统。具备自动均流技术,避免单模块过载。支持带电热更换…...

基于 ComfyUI 本地部署 的「图像 + 音频 → 口型匹配 + 自动运镜」MV 全流程指南
基于 ComfyUI 本地部署 的「图像 + 音频 → 口型匹配 + 自动运镜」MV 全流程指南 适用人群:有一定电脑(Windows / macOS / Linux)操作经验、显卡(GPU)支持 CUDA/ROCm、能自行安装 Python 第三方库的技术爱好者。 目标:输入一张人像图片 + 一段伴奏/人声音频,自动生…...

Appium Android自动化稳定性实战:从环境踩坑到三层熔断
1. 为什么现在还在手点Android测试?Appium不是“老古董”,而是最稳的工业级选择 很多人一听到Appium,第一反应是“这玩意儿2015年就火了,现在还讲它?”——我去年在给一家做金融类App的客户做质量体系升级时ÿ…...

端侧AI与嵌入式系统融合:从模型轻量化到5G通信的产业化落地
1. 从展会看趋势:端侧AI与嵌入式系统的深度融合最近在德国纽伦堡举办的国际嵌入式展览会,可以说是全球嵌入式技术发展的风向标。作为从业者,我每年都会关注这个展会,因为它总能揭示未来几年工业和技术应用的核心走向。今年&#x…...

+86环境下“纸飞机“登录异常排查:第三方开源客户端的认证与网络适配测试
近期在针对一款基于 MTProto 协议的即时通讯工具进行客户端适配测试时,发现其官方版本在 86 号段环境下存在较为突出的登录与连接稳定性问题。本文记录问题复现过程,以及基于开源代码二次开发的优化实践。一、登录异常现象在 86 手机号、新设备登录场景下…...