自动驾驶中的坐标系
自动驾驶中的坐标系
自动驾驶中的坐标系
- 0.引言
- 1.相机传感器坐标系
- 2.激光雷达坐标系
- 3.车体坐标系
- 4.世界坐标系
- 4.1.地理坐标系
- 4.2.投影坐标系
- 4.2.1.投影方式
- 4.2.2.墨卡托(Mercator)投影
- 4.2.3.高斯-克吕格(Gauss-Kruger)投影
- 4.2.4.通用横轴墨卡托UTM(UniversalTransverseMercator)投影
- 4.3.WGS84与UTM相互转换
- 5.自动驾驶中的坐标定位
0.引言
总结于网络。重点在世界坐标系理解。
图自

图自
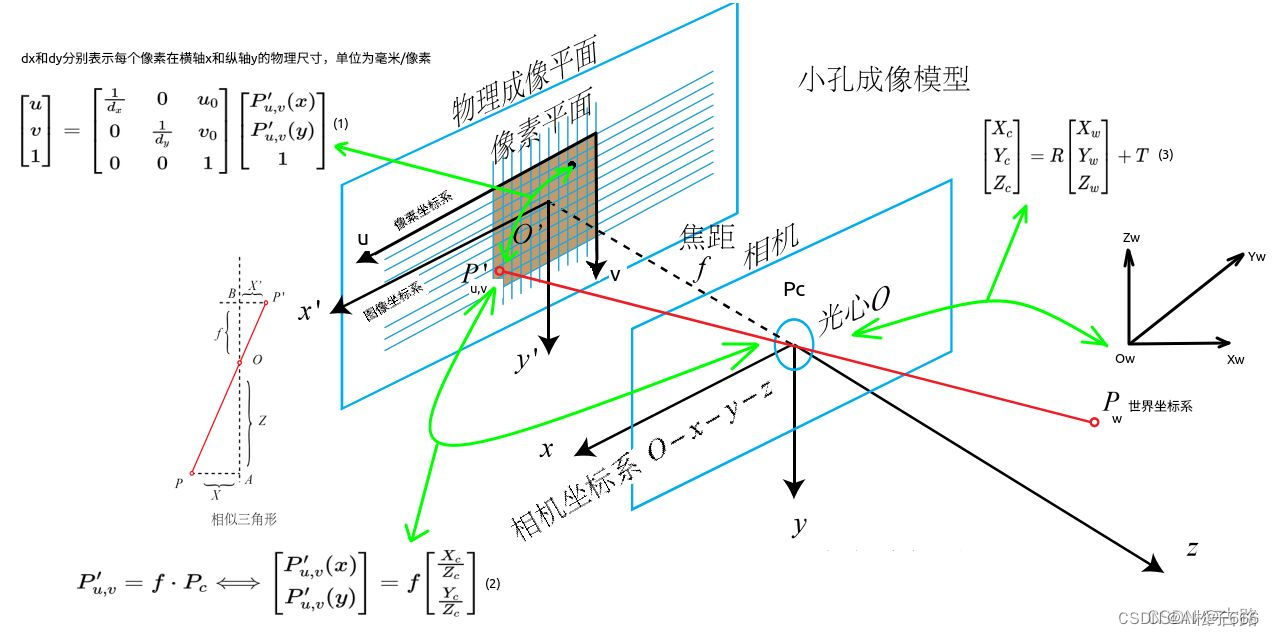
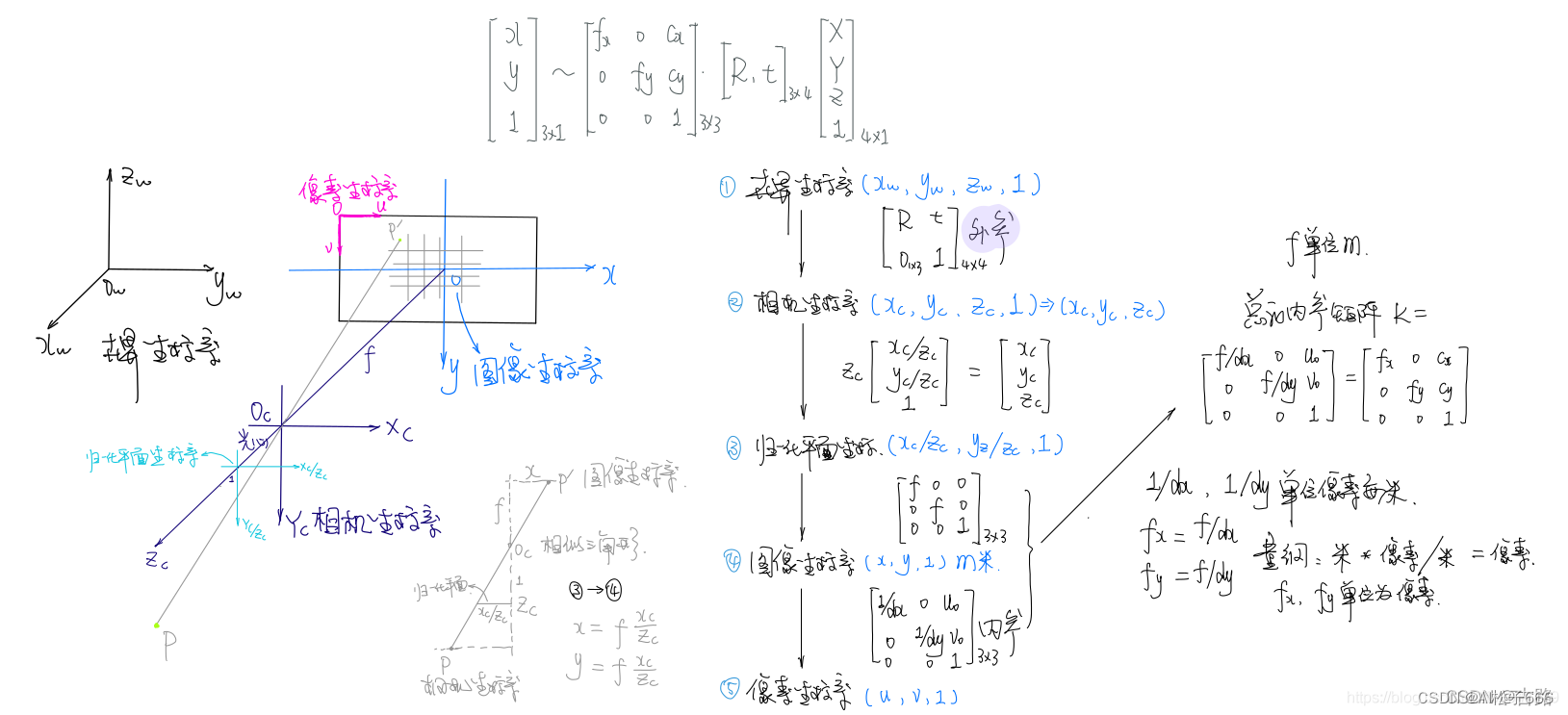
1.相机传感器坐标系
针孔模型:
图自
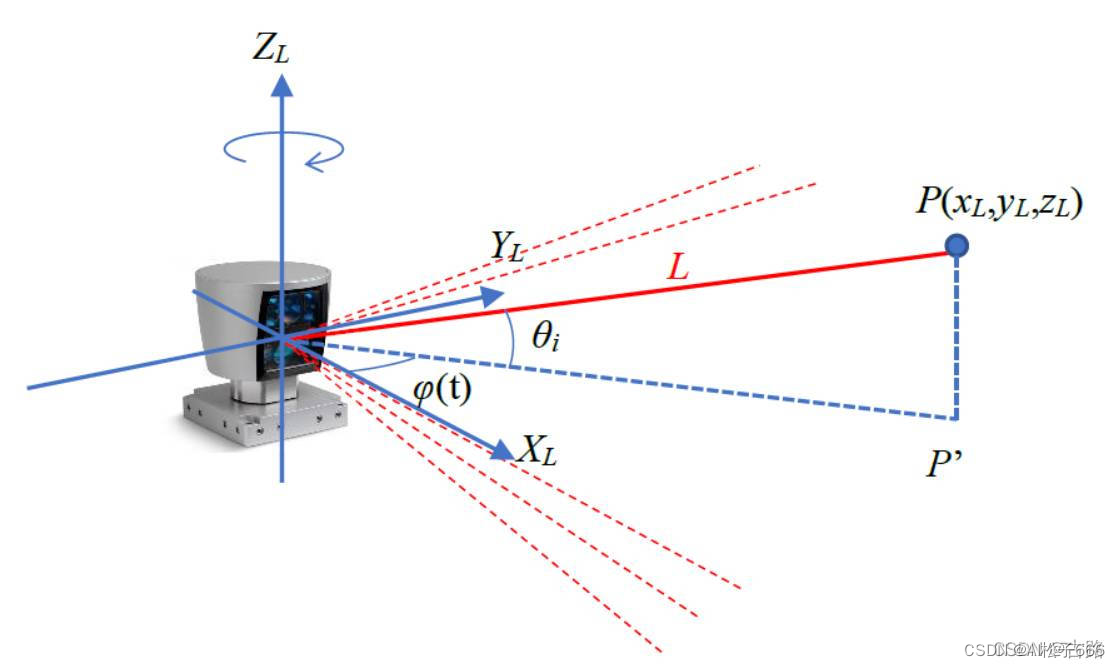
2.激光雷达坐标系
Velodyne生产的64线激光雷达HDL64:
64线激光雷达进行环境扫描过程:单帧扫描数据

64线激光雷达进行环境扫描过程:全周扫描数据
激光雷达坐标系统
此节来自
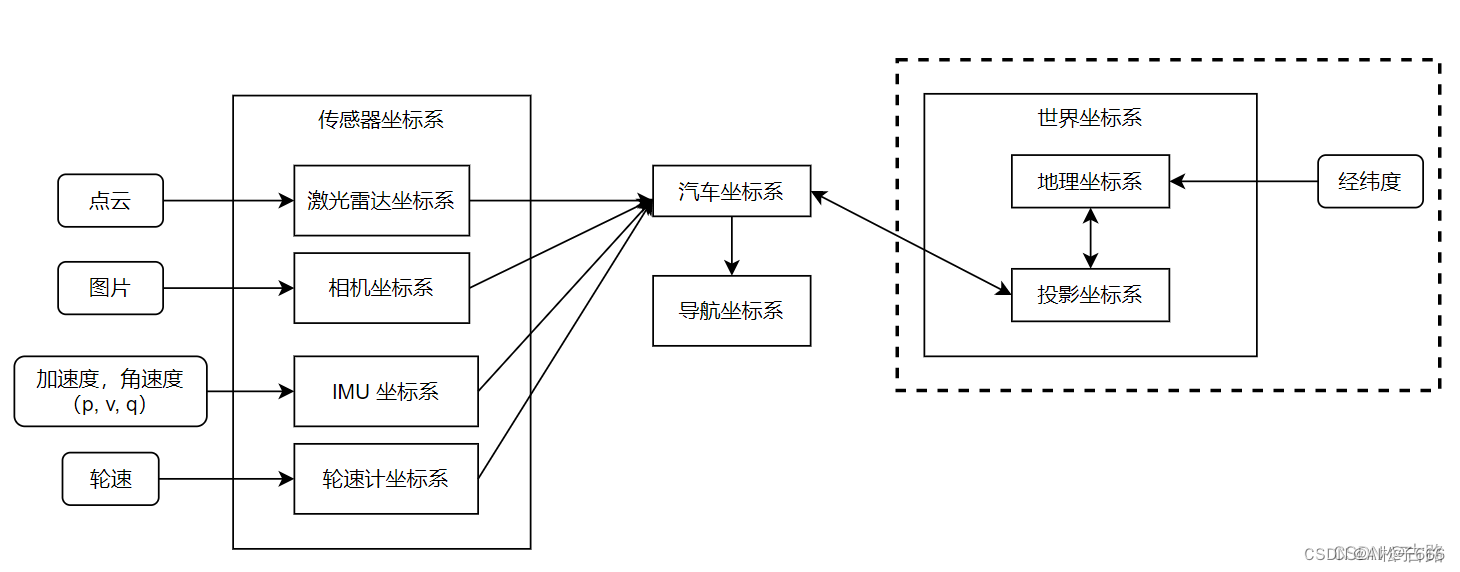
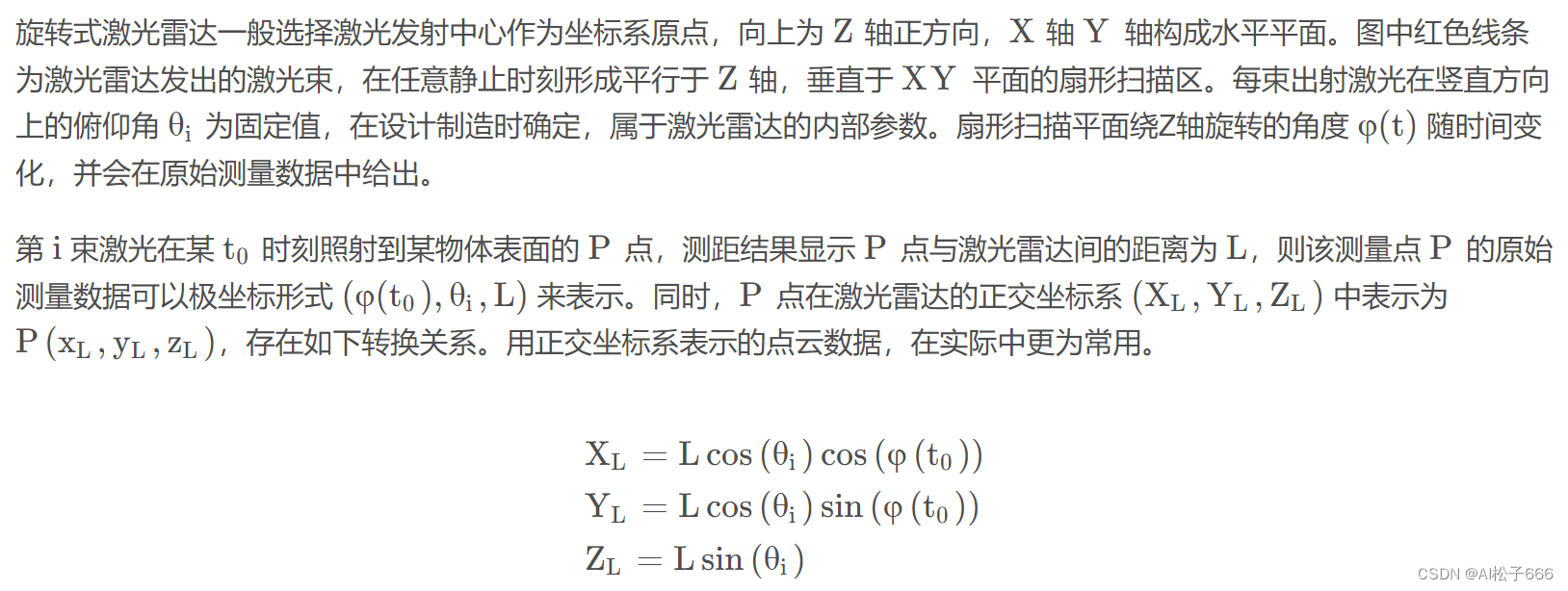
3.车体坐标系
车体坐标系用来描述车辆周围的物体和本车之间的相对位置关系。目前学术界和工业界有几种比较常用的车体坐标系定义方式。分别是ISO国际标准定义,SAE(Society of Automotive Engineers)汽车工程师协会定义,和基于惯性测量单元IMU的坐标定义。

在车辆动力学分析中,ISO定义的车体坐标系较为常见。SAE定义的车体坐标系与航空航天领域常用的机体坐标系相一致。基于IMU定义的车体坐标系,则在IMU的相关应用中较为常见。
此节来自
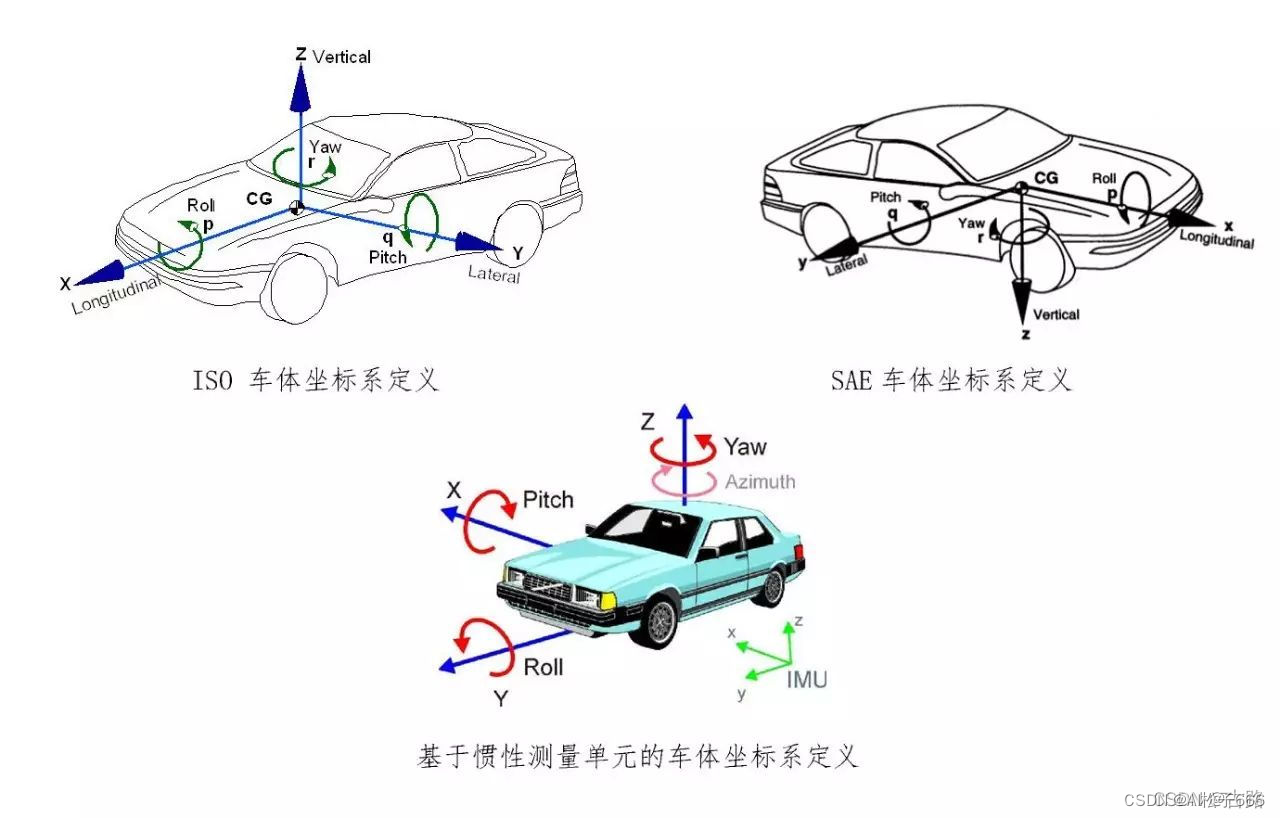
4.世界坐标系
地理坐标系统(英文简写GCS,Geographical Coordinate System)地理坐标系单位 度°分’秒"–>擅长定位
投影坐标系统(英文简写PCS,Projection Coordinate System)投影坐标系单位 米m–>擅长计算
4.1.地理坐标系
图自
某官网
大地坐标系与地理坐标系有何不同?
大地坐标系和地理坐标系都是经纬度表示的坐标系,本身并不包含投影信息,很多时候,这两种说法都是相同的。

蓝色:实际地球
红色:地心坐标系–>全球拟合表达
绿色:参心坐标系–>局部拟合表达(对于局部精度更高!)
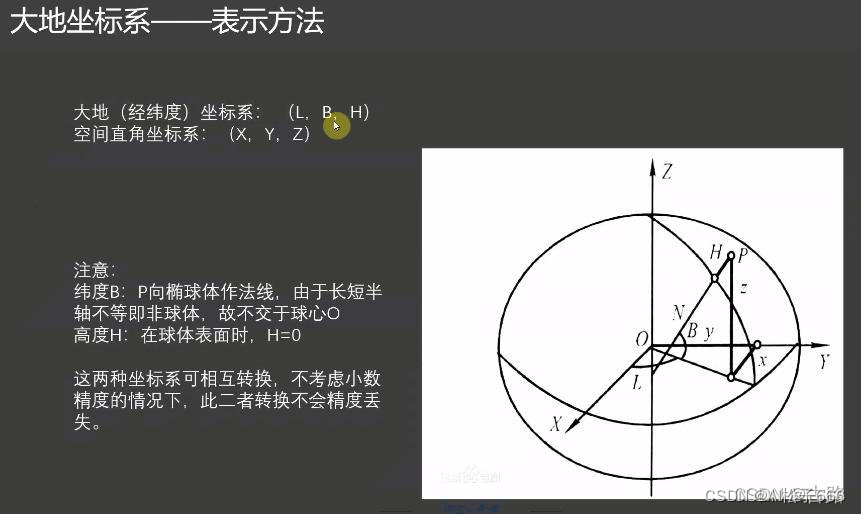
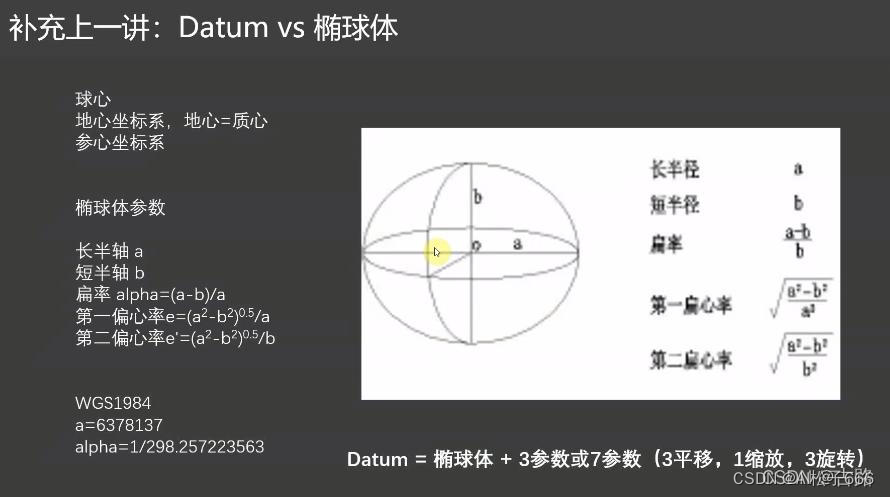
大地坐标系(经纬度)
L:longitude -->经度
B:latitude -->纬度
H: altitude -->海拔height above sea level
0度经线:国际上将通过英国伦敦格林尼治天文台原址的那条经线称为0°经线,也叫本初子午线:分别向东向西从 0°到 180°
0度纬线:赤道,越往两极纬度越高。纬线在南北极缩成一个点,叫极点,也分别是90°纬线。
表述:东经、西经、南纬、北纬–>"E"东经、"W"西经、"N"北纬、"S"南纬–>平时一般使用东经和北纬(也即是以东经北纬方向为正)

WGS84坐标系,全称为世界大地测量系统(英语:World Geodetic System)。WGS包含一套地球的标准经纬坐标系、一个用于计算原始海拔数据的参考椭球体,和一套用以定义海平面高度的引力等势面数据。WGS-84坐标为GPS(经过差分后)测量出来的,属于大地坐标系。
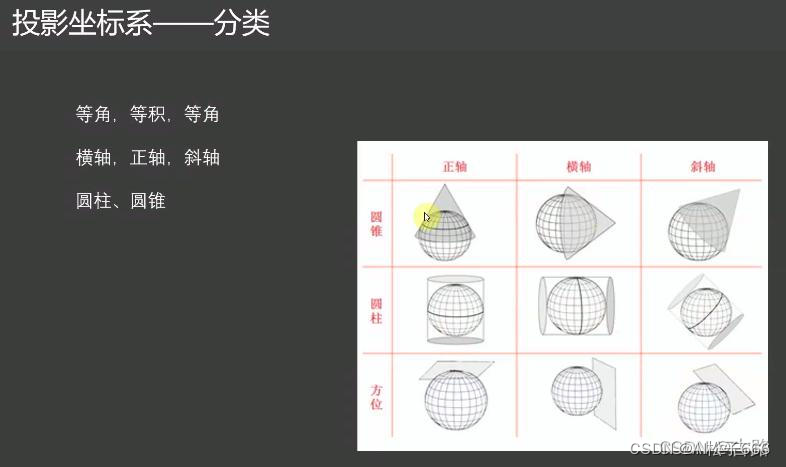
4.2.投影坐标系
4.2.1.投影方式
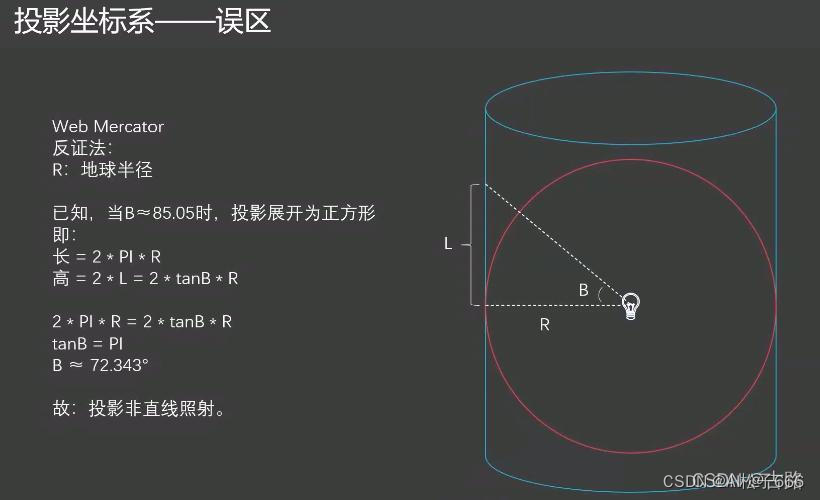
4.2.2.墨卡托(Mercator)投影
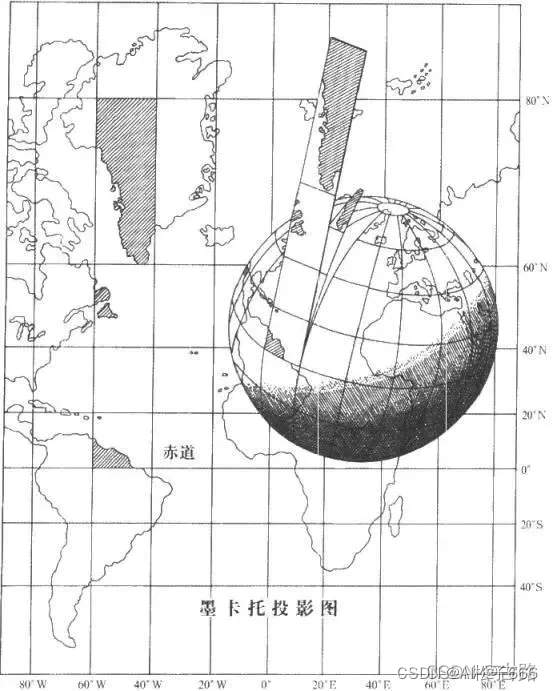
墨卡托(Mercator)投影,是一种"等角正切圆柱投影”.墨卡托投影没有角度变形,由每一点向各方向的长度比相等,它的经纬线都是平行直线,且相交成直角,经线间隔相等,纬线间隔从标准纬线向两极逐渐增大。墨卡托投影的地图上长度和面积变形明显,但标准纬线无变形,从标准纬线向两极变形逐渐增大,但因为它具有各个方向均等扩大的特性,保持了方向和相互位置关系的正确。
图自
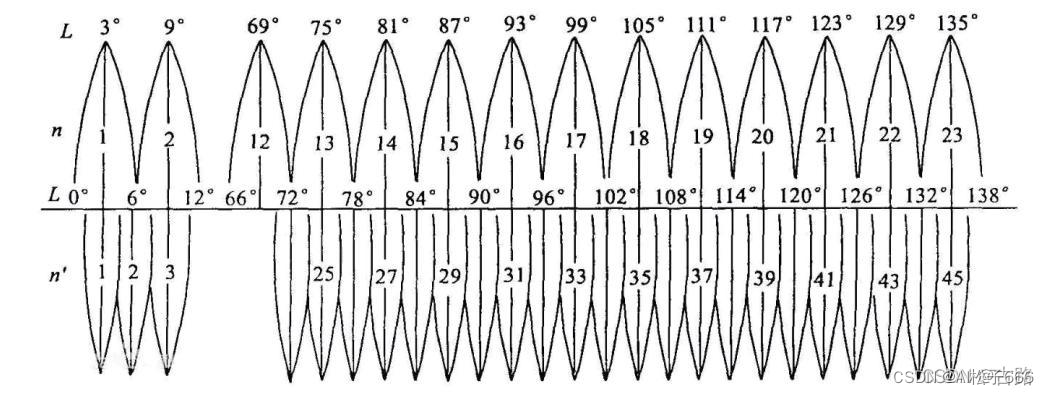
4.2.3.高斯-克吕格(Gauss-Kruger)投影
1.高斯-克吕格投影
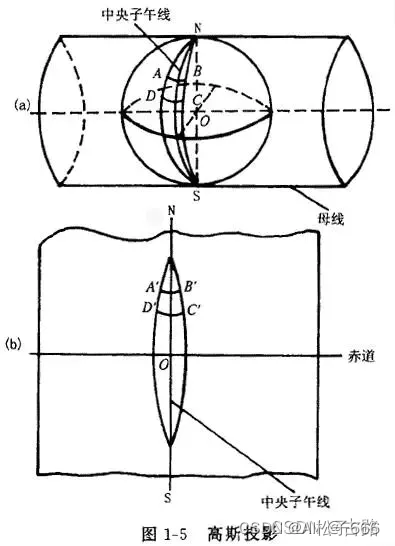
高斯-克吕格(Gauss-Kruger)投影简称“高斯投影”,又名"等角横切椭圆柱投影”,地球椭球面和平面间正形投影的一种。投影后,除中央子午线和赤道为直线外, 其他子午线均为对称于中央子午线的曲线。投影在长度和面积上变形很小,中央经线无变形,自中央经线向投影带边缘,变形逐渐增加(为什么会有变形,想象橘子皮剥开后压平),变形最大之处在投影带内赤道的两端。
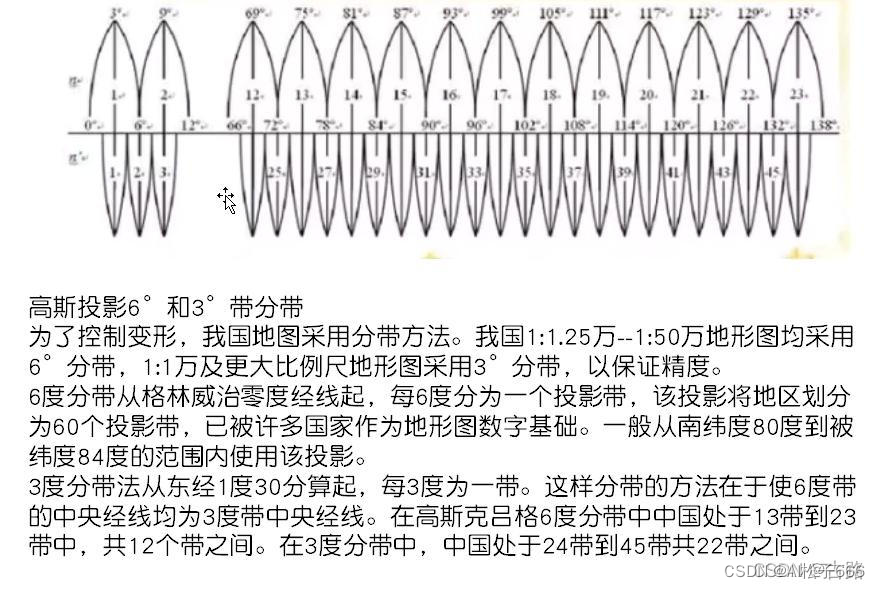
2.高斯-克吕格投影分带
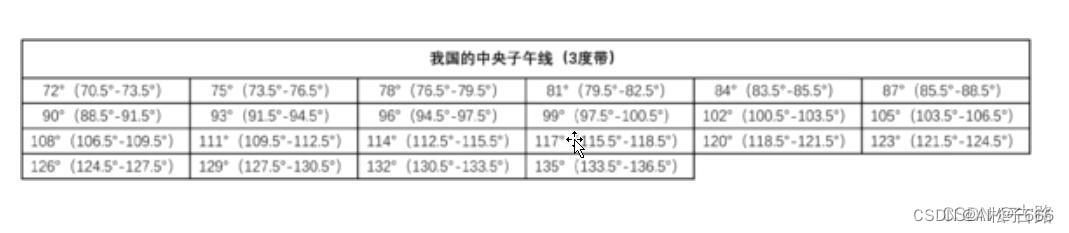
按照经线每隔多少度(三分度,六分度)进行划分:三分度:每隔三度一个中央经线(360/3 =120条中央子午线)
无带号坐标:
有带号坐标:
 三度带变形小,覆盖区域小
三度带变形小,覆盖区域小
六度带变形大,覆盖区域大
4.2.4.通用横轴墨卡托UTM(UniversalTransverseMercator)投影
和高斯克吕格投影非常相似,只不过它并不是切于经线圈,而是穿地球而过。我们从侧面来看,高斯投影面和经线圈是完全重合的,但是UTM则不是:
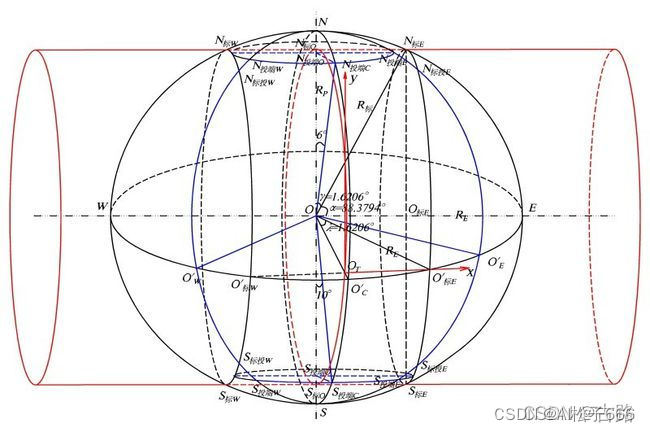
UTM投影现在采用WGS84地理坐标系统进行投影。
UTM投影全称为“通用横轴墨卡托投影”,是等角横轴割圆柱投影(高斯-克吕格为等角横轴切圆柱投影),圆柱割地球于南纬80度、北纬84度两条等高圈,该投影将地球划分为60个投影带,每带经差为6度,已被许多国家作为地形图的数学基础。UTM投影与高斯投影的主要区别在南北格网线的比例系数上添加链接描述,高斯-克吕格投影的中央经线投影后保持长度不变,即比例系数为1,而UTM投影的比例系数为0.9996。UTM投影沿每一条南北格网线比例系数为常数,在东西方向则为变数,中心格网线的比例系数为0.9996,在南北纵行最宽部分的边缘上距离中心点大约 363公里,比例系数为 1.00158。
高斯-克吕格投影与UTM投影可近似采用 Xutm=0.9996 * X高斯,Yutm=0.9996 * Y高斯进行坐标转换。
UTM
坐标3度带与6度带的知识01
坐标3度带与6度带的知识02
中央子午线
6度带中央子午线计算公式:当地经度/6=N;中央子午线L=6 X N
当没有除尽,N有余数时,中央子午线L=6 X N - 3
3度带中央子午线计算公式:当地经度/3=N;中央子午线L=3 X N
顺带知识点:
全球分为二十四个时区,以能够被15整除的经度作为该区域的中央子午线,每一时区占经度15度。
在该时区中央子午线以东的地区,时间要加,以西的地区,时间要减,一度4分钟。中国共分五个时区:(1)中原时区:以东经120度为中央子午线。(2)陇蜀时区:以东经105度为中央子午线。(3)新藏时区:以东经90度为中央子午线。(4)昆仑时区:以东经75(82.5)度为中央子午线。(5)长白时区:以东经135(127.5)度为中央子午线。一个时区的“标准时”,只是一个大地区的统一时间,大家共同遵守的“人工”时间而已,并不是该时区内每个地点的“本地时间(LMT)”——真正的经度时。要用出生地的经度与出生大地区的标准时来加减,全球任何地点都用这个原则。例如:中原时区包括内蒙古、辽宁、河北、山西、山东、河南、安徽、江苏、湖北、湖南、江西、浙江、福建、广东、海南、香港、澳门、台湾。这个大地区当时钟敲定正午12点时,只有位于东经120度线上的地点才是12点,其它的地方是少于或多于12点。如香港位于东经114度10分,比东经120度偏西5度50分,其真正经度时是11时36分40秒。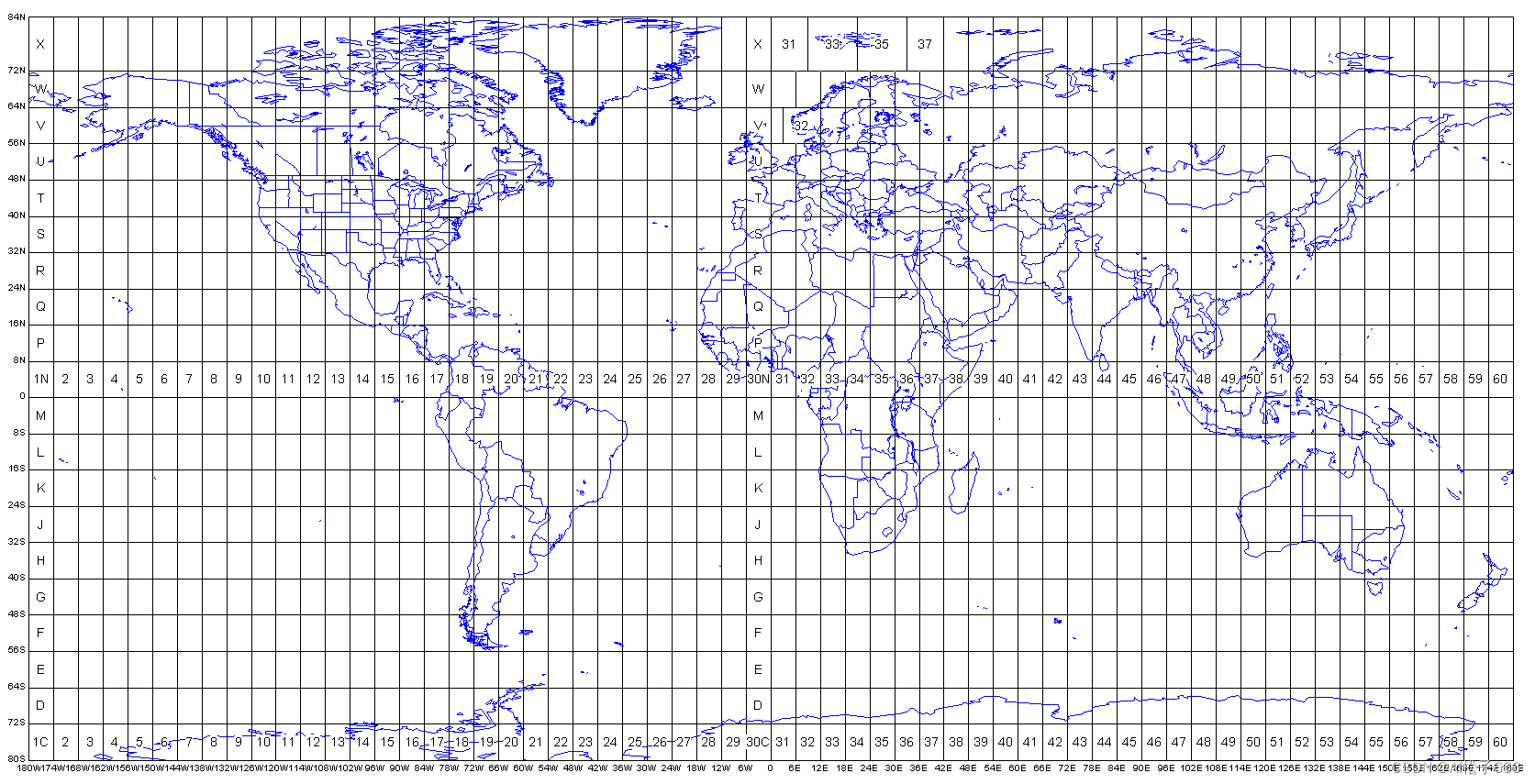
4.3.WGS84与UTM相互转换
UTM与WGS84相互转换
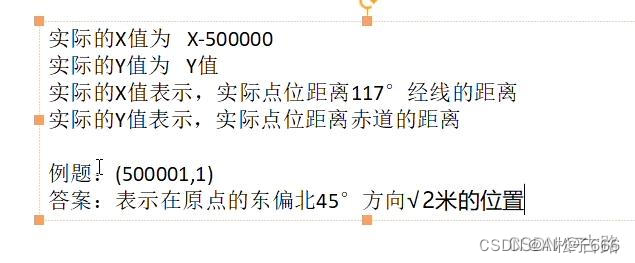
在每个纵向区域内,横向墨卡托投影用于给出以米为单位的坐标(东距和北距)。
对于东距,原点定义为每个纵向带中央子午线以西 500,000 米的点,给出中央子午线的东距 500,000 米。
对于北半球的北向,原点被定义为赤道。
对于南半球的北向,原点定义为赤道以南 10,000,000 米的点。

X轴:指向东边
Y轴:指向北边
Z轴:指向天顶
将中央子午线指定为每个区域内坐标系的参考 y 轴(即东距 = 0)将导致中央子午线以西的点的东距值为负。为此,中央子午线被指定为 500000 米的任意值,从而避免任何负东坐标;位于其东面的点的东距值将大于 500000m,位于西面的点的值将小于 500000m。此分配会将原点放置在中央子午线以西 500000m 的区域外,因此原点称为假原点,东坐标称为假东。
赤道被指定为 UTM 北向坐标的水平参考轴,并为北半球的区域分配了 0 米北的值。为了避免负数,赤道被分配了一个10,000,000米南的假北距,用于参考南半球的北距坐标。(但是好像图中没有给出假北距)
UTM - 通用横轴墨卡托
UTM坐标和WGS84坐标
UTM的东北坐标只有两个数字,还需要zone的区间号才能转换为经纬度坐标因此准确的UTM坐标包括三个参数,区间+东北坐标。
GPS经纬度坐标转UTM坐标(c++)
void LonLat2UTM(double longitude, double latitude, double& UTME, double& UTMN)
{double lat = latitude;double lon = longitude;double kD2R = PI / 180.0;double ZoneNumber = floor((lon - 1.5) / 3.0) + 1;double L0 = ZoneNumber * 3.0;double a = 6378137.0;double F = 298.257223563;double f = 1 / F;double b = a * (1 - f);double ee = (a * a - b * b) / (a * a);double e2 = (a * a - b * b) / (b * b);double n = (a - b) / (a + b); double n2 = (n * n); double n3 = (n2 * n); double n4 = (n2 * n2); double n5 = (n4 * n);double al = (a + b) * (1 + n2 / 4 + n4 / 64) / 2.0;double bt = -3 * n / 2 + 9 * n3 / 16 - 3 * n5 / 32.0;double gm = 15 * n2 / 16 - 15 * n4 / 32;double dt = -35 * n3 / 48 + 105 * n5 / 256;double ep = 315 * n4 / 512;double B = lat * kD2R;double L = lon * kD2R;L0 = L0 * kD2R;double l = L - L0; double cl = (cos(B) * l); double cl2 = (cl * cl); double cl3 = (cl2 * cl); double cl4 = (cl2 * cl2); double cl5 = (cl4 * cl); double cl6 = (cl5 * cl); double cl7 = (cl6 * cl); double cl8 = (cl4 * cl4);double lB = al * (B + bt * sin(2 * B) + gm * sin(4 * B) + dt * sin(6 * B) + ep * sin(8 * B));double t = tan(B); double t2 = (t * t); double t4 = (t2 * t2); double t6 = (t4 * t2);double Nn = a / sqrt(1 - ee * sin(B) * sin(B));double yt = e2 * cos(B) * cos(B);double N = lB;N = N + t * Nn * cl2 / 2;N = N + t * Nn * cl4 * (5 - t2 + 9 * yt + 4 * yt * yt) / 24;N = N + t * Nn * cl6 * (61 - 58 * t2 + t4 + 270 * yt - 330 * t2 * yt) / 720;N = N + t * Nn * cl8 * (1385 - 3111 * t2 + 543 * t4 - t6) / 40320;double E = Nn * cl;E = E + Nn * cl3 * (1 - t2 + yt) / 6;E = E + Nn * cl5 * (5 - 18 * t2 + t4 + 14 * yt - 58 * t2 * yt) / 120;E = E + Nn * cl7 * (61 - 479 * t2 + 179 * t4 - t6) / 5040;E = E + 500000;N = 0.9996 * N;E = 0.9996 * (E - 500000.0) + 500000.0;UTME = E;UTMN = N;
}GPS坐标转换:经纬度转UTM坐标(Matlab程序)
感悟:没有系统的学习,去网上查资料都是零碎的业余选手讲解,很难形成系统,所以有时间还是需要多读书,但是也不知道这个知识点在那本书中有详细的讲解,就像这篇博客下面的评论一样,想问问是那本书上的公式都没人理。
根据经纬度算UTM带号
UTM是由美国制定,因此起始分带并不在本初子午线,而是在180度,因而所有美国本土都处于0-30带内。UTM投影采用6度分带,从东经180度(或西经180度)开始,自西向东算起,因此1带的中央经线为-177(-180 -(-6)),而0度经线为30带和31带的分界,这两带的分界分别是-3和3度。纬度采用8度分带,从80S到84N共20个纬度带(X带多4度),分别用C到X的字母来表示。为了避免和数字混淆,I和O没有采用。UTM的“false easting”值为500km,而南半球UTM带的“false northing”为10000km
“WGS 1984”坐标系的墨卡托投影分度带(UTM ZONE)选择方法如下:
(1)北半球地区,选择最后字母为“N”的带;
(2)可根据公式计算,带数=(经度整数位/6)的整数部分+31
如:北京经度约116.4,
带数=116/6+31=50,选50N,即WGS 1984 UTM ZONE 50N
GPS定位技术
apollo 采用的UTM投影
- 根据经度求带号
namespace {
int GetLongZone(double longitude) {double longZone = 0.0;if (longitude < 0.0) {longZone = ((180.0 + longitude) / 6.0) + 1;} else {longZone = (longitude / 6.0) + 31;}return static_cast<int>(longZone);
}
} 5.自动驾驶中的坐标定位
GPS/RTK获得经度lon、纬度lat、高程height、偏航角yaw、俯仰角pitch、横滚角roll 。
将lon,lat转化为utm坐标,(utm_x, utm_y, height)就可以作为GPS此时在世界坐标系下位置,再把yaw,pitch,roll转化为旋转矩阵,就可以得到GPS在世界坐标系下的姿态q,合起来就得到了GPS在世界坐标系下的位姿
通过标定可得到GPS到车身base_link坐标系的变换,这样就能得到当前车身base_link在世界坐标系下的位姿,再由标定可得到lidar到车身base_link坐标系的变换,这样就能把lidar坐标系下的点云变换到世界坐标系下,也就是高精地图中点云的坐标。
由于地图太大,需要对其进行方形网格分块进行存储和查询,每一块的id可通过resolution, col(utm_x/resolution), row(utm_y/resolution), utm_zone, utm_band进行编码。
同时,将GPS得到的经纬度转换为火星坐标系 (在中国大陆使用地图服务的话,我们可能会看到GCJ-02这个坐标系统,这又是什么东西呢?GCJ-02是国家测绘局(国测局,GCJ,这样的缩写比较罕见)02号标准的意思。它是一种对经纬度数据的加密算法,即加入随机的偏差。国内出版的各种地图系统(包括电子形式),必须至少采用GCJ-02对地理位置进行首次加密。由于最开始的时候一些国外地图服务商没搞明白这点,直接使用了GCJ-02加密的坐标来显示POI,从而把这些POI移到太平洋上去了,所以网友也戏称火星坐标。) ,就通过一些地理信息可视化库在地图上可视化轨迹,如通过轨迹坐标生成kml文件,就可以在谷歌地球上显示轨迹。
整篇文章转载自
相关文章:
自动驾驶中的坐标系
自动驾驶中的坐标系 自动驾驶中的坐标系 0.引言1.相机传感器坐标系2.激光雷达坐标系3.车体坐标系4.世界坐标系4.1.地理坐标系4.2.投影坐标系4.2.1.投影方式4.2.2.墨卡托(Mercator)投影4.2.3.高斯-克吕格(Gauss-Kruger)投影4.2.4.通用横轴墨卡托UTM(UniversalTransve…...

js数组的截取和合并
在JavaScript中,你可以使用slice()方法来截取数组,使用concat()方法来合并数组。 截取数组 slice()方法返回一个新的数组对象,这个对象是一个由原数组的一部分浅复制而来。它接受两个参数,第一个参数是开始截取的位置(…...

2024美赛数学建模思路 - 案例:感知机原理剖析及实现
文章目录 1 感知机的直观理解2 感知机的数学角度3 代码实现 4 建模资料 # 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 感知机的直观理解 感知机应该属于机器学习算法中最简单的一种算法,其…...

大中台,小前台:打造快速响应市场的企业竞争力
2015年,大家都听过“大中台、小前台”战略,听上去很牛。“大中台、小前台”背后完成了一件事情:把阿里巴巴和支付宝所有的基础技术全部统一到阿里云上,这是个重大的技术变革。为了完成这个技术变革,阿里巴巴做了非常好…...

SpringCloud Alibaba 深入源码 - Nacos 和 Eureka 的区别(健康检测、服务的拉取和订阅)
目录 一、Nacos 和 Eureka 的区别 1.1、以 Nacos 注册流程来解析区别 一、Nacos 和 Eureka 的区别 1.1、以 Nacos 注册流程来解析区别 a)首先,我们的服务启动时。都会把自己的信息提交给注册中心,然后注册中心就会把信息保存下来. 注册的…...

Java复习_3
填空题 课程推荐的 jdk 下载网址为 jdk.java.net 使用命令行编译程序:javac -d bin stc*.java 使用命令行运行程序: java -cp bin 类名 java 语言标识符:字母、数字、下划线和美元符号,数字不能做首字母 java 语言中标识符区…...
分类预测 | Matlab实现KPCA-EBWO-SVM分类预测,基于核主成分分析和改进的白鲸优化算法优化支持向量机分类预测
分类预测 | Matlab实现KPCA-EBWO-SVM分类预测,基于核主成分分析和改进的白鲸优化算法优化支持向量机分类预测 目录 分类预测 | Matlab实现KPCA-EBWO-SVM分类预测,基于核主成分分析和改进的白鲸优化算法优化支持向量机分类预测分类效果基本描述程序设计参…...
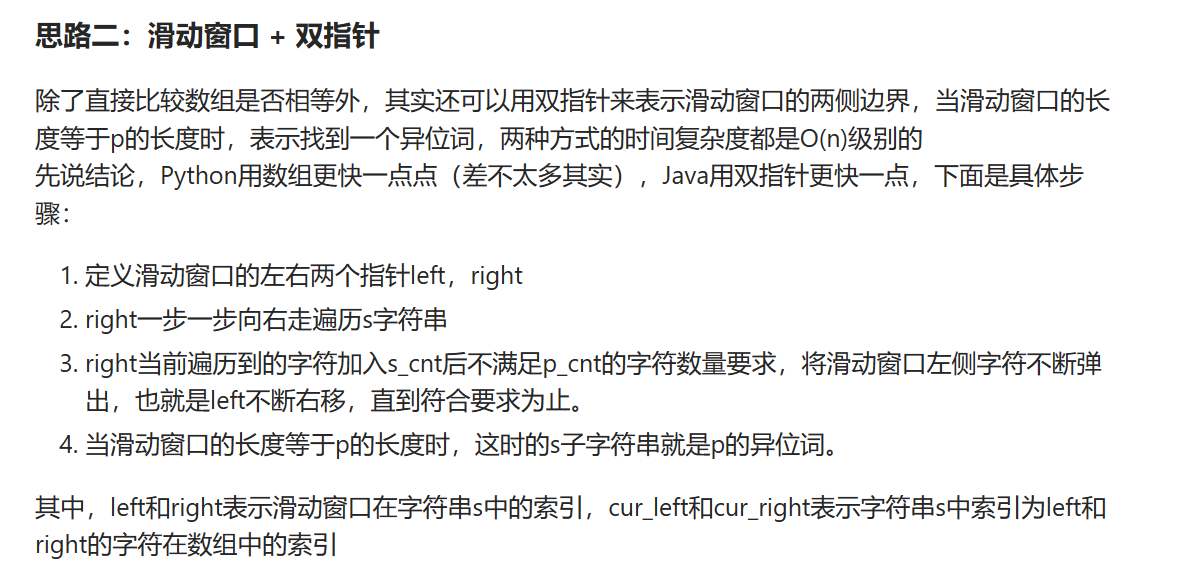
力扣hot100 找到字符串中所有字母异位词 滑动窗口 双指针 一题双解
Problem: 438. 找到字符串中所有字母异位词 文章目录 思路滑动窗口 数组滑动窗口 双指针 思路 👩🏫 参考题解 滑动窗口 数组 ⏰ 时间复杂度: O ( n ) O(n) O(n) 🌎 空间复杂度: O ( 1 ) O(1) O(1) class Solution { // 滑动窗口 …...

PG DBA培训21:PostgreSQL性能优化之基准测试
本课程由风哥发布的基于PostgreSQL数据库的系列课程,本课程属于PostgreSQL Performance Benchmarking,学完本课程可以掌握PostgreSQL性能基准测试基础知识,基准测试介绍,基准测试相关指标,TPCC基准测试基础,PostgreSQL测试工具介绍,PostgreSQL性能基准测…...

使用excel从1-2048中随机选择1个整数,并展示与其对应的单词
在Excel中,你可以使用以下指令来从1到2048之间随机选择一个整数,并展示其对应的单词: 1. 首先,在一个空白单元格中输入以下公式: INDEX(单词列表范围, RANDBETWEEN(1, 2048)) 这里的"单词列表范围"是一个包…...
c++可调用对象、function类模板与std::bind
函数调用与函数调用运算符 先写一个简单的函数,如下: /*函数的定义*/ int func(int i) {cout<<"这是一个函数\t"<<i<<endl; }void test() {func(1);//函数的调用 } 通过这个普通的函数可以看到,调用一个函数很…...

【高危】Apache Solr 环境变量信息泄漏漏洞
漏洞描述 Apache Solr 是一款开源的搜索引擎。 在 Apache Solr 受影响版本中,由于 Solr Metrics API 默认输出所有未单独配置保护策略的环境变量。在默认无认证或具有 metrics-read 权限的情况下,攻击者可以通过向 /solr/admin/metrics 端点发送恶意请…...
入门)
Python中的卷积神经网络(CNN)入门
卷积神经网络(Convolutional Neural Networks, CNN)是一类特别适用于处理图像数据的深度学习模型。在Python中,我们可以使用流行的深度学习库TensorFlow和Keras来创建和训练一个CNN模型。在本文中,我们将介绍如何使用Keras创建一个…...

vulnhub靶机HotelWW
下载地址:https://download.vulnhub.com/worstwesternhotel/HotelWW.ova 主机发现 目标142 端口扫描 服务版本扫描 漏洞扫描 看一下web 好好好这么玩改host 啥也没有先做个目录爆破 扫描太慢我就没看了看几个重点的txt(robot,config,readme&…...
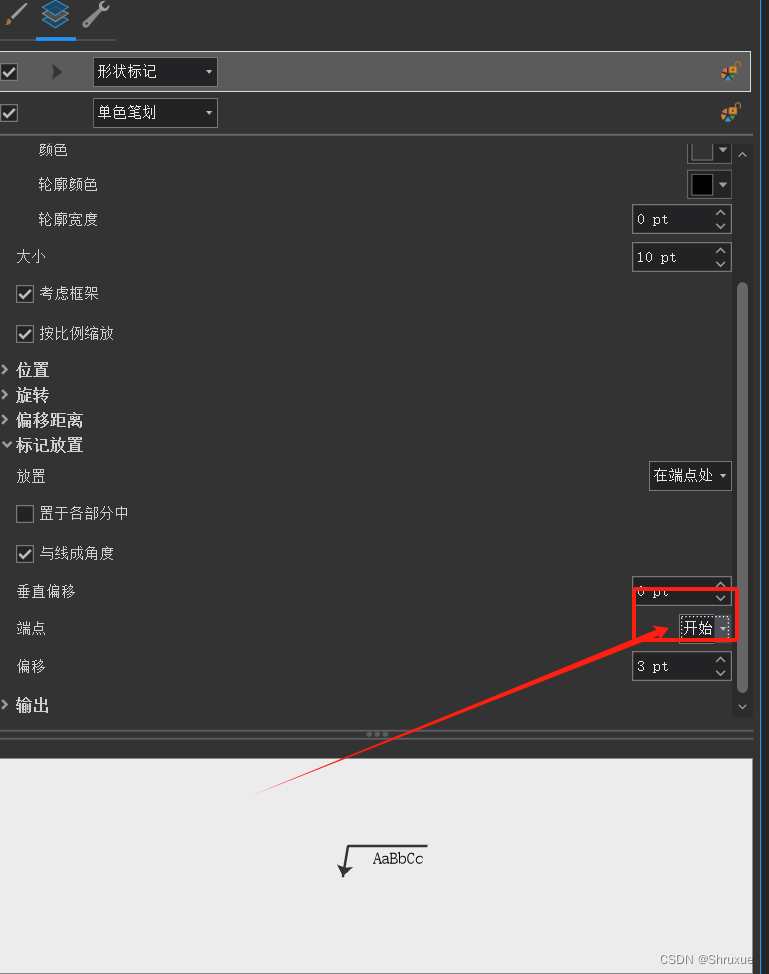
ArcGIS Pro 标注牵引线问题
ArcGIS Pro 标注 模仿CAD坐标牵引线问题 右键需要标注的要素,进入标注属性。 选择背景样式 在这里有可以选择的牵引线样式 选择这一个,可以根据调整间距来进行模仿CAD标注样式。 此图为cad样式 此为调整后gis样式 此处可以调整牵引线的样式符号 …...
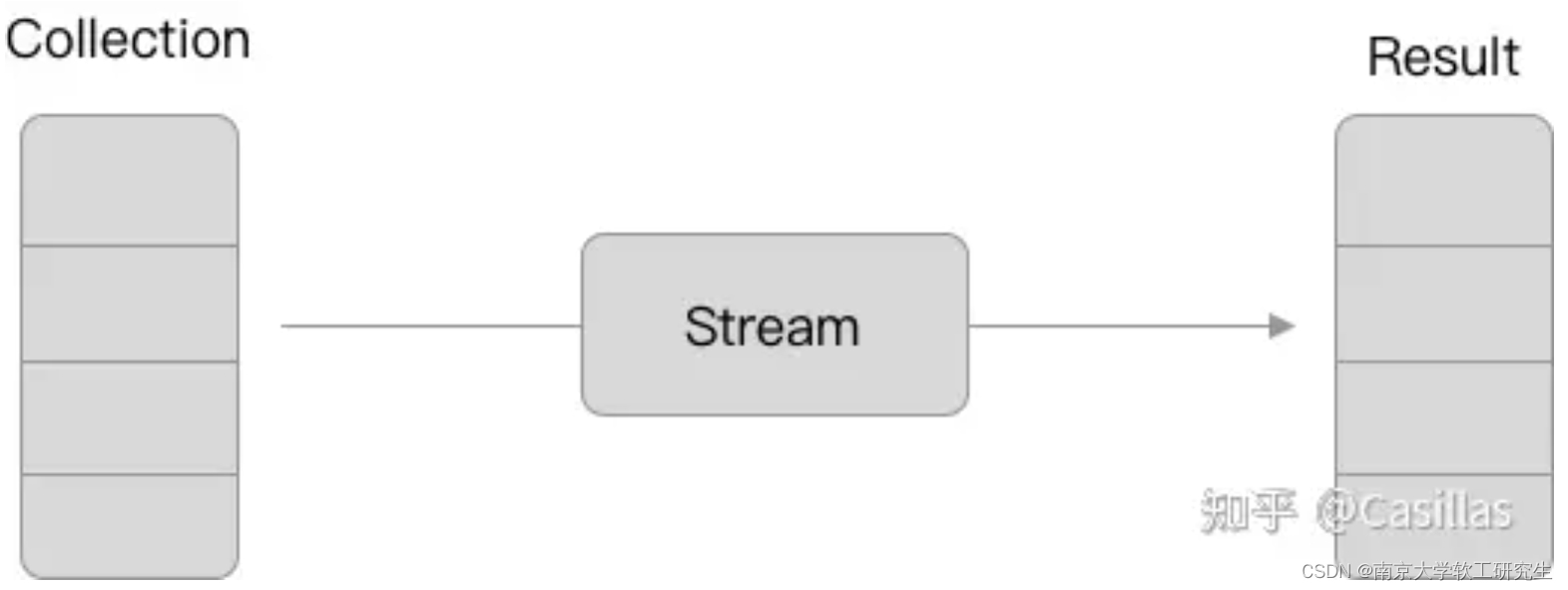
Java8的Stream最佳实践
从这一篇文章开始,我们会由浅入深,全面的学习stream API的最佳实践(结合我的使用经验),本想一篇写完,但写着写着发现需要写的内容太多了,所以分成一个系列慢慢来说。给大家分享我的经验的同时&a…...
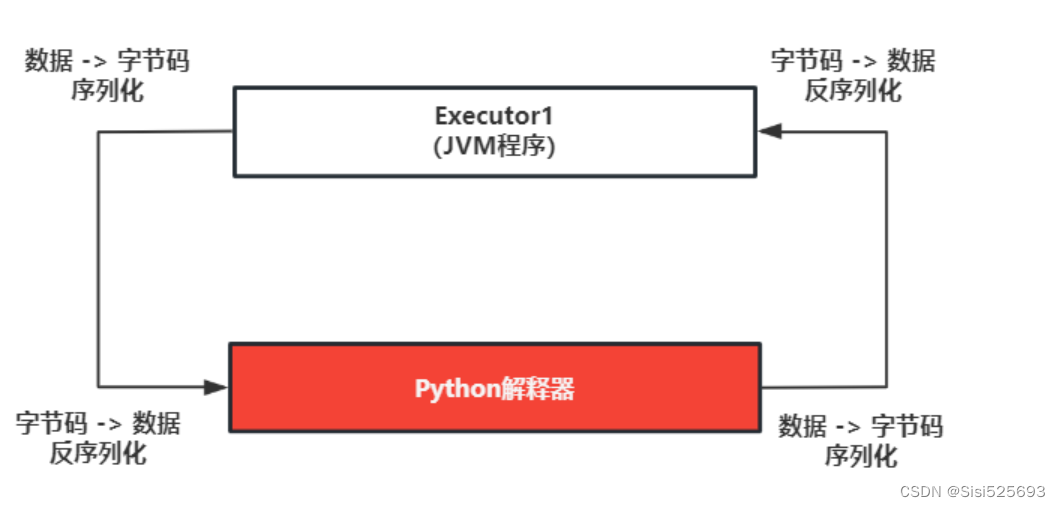
Spark SQL函数定义
目录 窗口函数 SQL函数分类 Spark原生自定义UDF函数 Pandas的UDF函数 Apache Arrow框架基本介绍 基于Arrow完成Pandas DataFrame和Spark DataFrame互转 基于Pandas完成UDF函数 自定义UDF函数 自定义UDAF函数 窗口函数 分析函数 over(partition by xxx order by xxx [as…...

触摸屏监控双速电动机-PLC I/O电路设计
PLC的输入接线电路图 PLC的输入接线电路如图1-21所示。24VDC电源选用0.7mm2的棕色和蓝色软铜导线,弱电信号线用0.5~0.7mm2的黑色或者白色软铜导线。 PLC输入接线图 PLC的输出接线电路图 PLC的输出接线电路如图1-22所示。AC220V接触器型号为CJX2-12,线…...
idea中使用git提交代码报 Nothing To commit No changes detected
问题描述 在idea中右键,开始将变更的代码进行提交的时候,【Commit Directory】点击提交的时候 报 Nothing To commit No changes detected解决方案 在这里点击Test 看看是不是能下面显示git版本,不行的话 会显示一个 fix的字样,行…...

基于长短期神经网络的回归分析,基于LSTM的回归预测
目录 背影 摘要 LSTM的基本定义 LSTM实现的步骤 基于长短期神经网络LSTM的回归分析 MATALB代码:基于长短期神经网络的回归分析,基于LSTM的回归预测资源-CSDN文库 https://download.csdn.net/download/abc991835105/88184633 效果图 结果分析 展望 参考论文 背影 LSTM神经…...
)
从芯片手册到PCB:手把手教你用TPS5430搞定24V转15V电源(附完整BOM清单)
从芯片手册到PCB:手把手教你用TPS5430搞定24V转15V电源(附完整BOM清单) 在硬件设计领域,电源模块的设计往往是最基础却也最考验工程师功底的环节。一个优秀的电源设计不仅需要满足电压转换的基本需求,还要兼顾效率、稳…...

FanControl中文设置终极指南:5步让Windows风扇控制说中文
FanControl中文设置终极指南:5步让Windows风扇控制说中文 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending…...

3分钟上手Windhawk:像安装App一样轻松定制Windows系统
3分钟上手Windhawk:像安装App一样轻松定制Windows系统 【免费下载链接】windhawk The customization marketplace for Windows programs: https://windhawk.net/ 项目地址: https://gitcode.com/gh_mirrors/wi/windhawk 你是否厌倦了Windows系统一成不变的界…...

Linux串口编程进阶:深入termios2结构体,搞定CH340/FTDI各种转接器的非标准波特率
Linux串口编程实战:破解CH340/FTDI非标准波特率适配难题 当你在工业物联网项目中尝试将某个9600bps的设备升级到115200bps时,可能会发现某些USB转串口适配器死活不配合——明明代码正确,波特率却始终无法生效。这不是你的错,而是…...

终极MifareOneTool完整指南:Windows平台最简单的一键NFC卡片管理方案
终极MifareOneTool完整指南:Windows平台最简单的一键NFC卡片管理方案 【免费下载链接】MifareOneTool A GUI Mifare Classic tool on Windows(停工/最新版v1.7.0) 项目地址: https://gitcode.com/gh_mirrors/mi/MifareOneTool 你是否曾…...
)
不止于点灯:用STM32F103和JDY-23蓝牙,打造你的第一个智能家居原型(附OLED状态显示)
从原型到产品:基于STM32F103与JDY-23的智能家居开发实战 在创客圈里,用单片机控制LED灯可能是最入门的实验之一。但如何将一个简单的点灯Demo升级为具备产品思维的原型系统?这正是本文要探讨的核心。我们将以STM32F103C8T6为主控,…...

废水污染源在线监测管理平台方案
某企业从事染整加工生产,属于环境监管重点单位,安装有废水自动处理系统,监控因子包括PH值、化学需氧量、氨氮、总氮等。但在某次巡查工作时发现,化学需氧量远远超过排放标准,但涉事企业却未上报排放超标的情况。因此要…...

推理服务为什么一上自动 Prompt 优化就开始成本失控:从 Prompt 版本爆炸到在线 A/B 收敛的工程实战
一、自动 Prompt 优化的成本幻觉 不少团队上线推理服务后,发现同一任务换句 Prompt 输出质量可提升 20%。🚀 自动 Prompt 优化因此成了香饽饽——系统同时维护几十个版本在线分流。但两周后账单涨了 40%。⚡️ 问题不在 Prompt,而是版本爆炸把…...

ClaudeCode安装与使用全攻略
一、安装 Claude Code 1. 安装 Claude Code 1.1 安装 Git 根据需求选择对应的安装方式: https://git-scm.com/book/zh/v2/%E8%B5%B7%E6%AD%A5-%E5%AE%89%E8%A3%85-Git windows 版本下载地址: https://git-scm.com/install/windows 1.2 安装 node…...

当贝叶斯遇见流数据:在线变点检测在IoT异常监控中的实战指南
贝叶斯在线变点检测:IoT实时异常监控的智能引擎 工厂车间里,数百个温度传感器正以每秒10次的频率向中央系统发送数据流。突然,3号机床的轴承温度读数开始出现微妙波动——这是设备过热的早期信号,但传统阈值报警系统却毫无反应。两…...